一种水空两栖跨介质无人飞行器
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及飞行器技术领域,特别是涉及一种水空两栖跨介质无人飞行器。
背景技术
水空两栖跨介质无人飞行器可以在水和空气两种不同流体介质间适应性地实现运动过渡,并且可以在两种介质中自主地连续航行,具备飞行器的高速高机动和快速部署能力和无人水面舰艇的快速游弋能力或无人水下航行器的高隐蔽性等优势,因此在军事和民用领域都具有广阔的应用前景。
常规固定翼无人机的起飞方式主要为滑跑起飞、弹射起飞、火箭助推起飞,回收方式主要为阻拦网回收、撞线回收、伞降和气囊回收。上述起降方式都对场地有较高要求。相比之下,旋翼无人机起降不易受场地限制,但其水平飞行速度、飞行高度、巡航速度和续航时间等指标均低于同级别的固定翼无人机。若为了保证飞行器的飞行性能,而采用固定翼飞行器,无疑增加了水空两栖跨介质无人飞行器的投放限制,降低了水空两栖跨介质无人飞行器的适应性。
因此,如何提高水空两栖跨介质无人飞行器的适应性,成为了本领域技术人员亟待解决的问题。
发明内容
本发明的目的是提供一种水空两栖跨介质无人飞行器,以解决上述现有技术存在的问题,在保证飞行器飞行性能的前提下,降低飞行器的起降难度,提高水空两栖跨介质无人飞行器的适应性。
为实现上述目的,本发明提供了如下方案:本发明提供一种水空两栖跨介质无人飞行器,包括:
机身单元,所述机身单元包括机身外壳和储水机构,所述储水机构设置于所述机身外壳内,所述储水机构能够通过给排水改变所述机身单元的质量;
主机翼单元,所述主机翼单元包括折叠机构、后掠主机翼和前掠主机翼,所述折叠机构设置于所述机身外壳内,所述后掠主机翼以及所述前掠主机翼均与所述折叠机构相连,所述折叠机构能够带动所述后掠主机翼和所述前掠主机翼展开和收拢,当所述后掠主机翼和所述前掠主机翼处于收拢状态时,所述后掠主机翼和所述前掠主机翼均平行于所述机身外壳的长度方向;
起落架,所述起落架与所述机身单元的一端相连,所述起落架能够展开和合拢,所述起落架展开时能够支撑所述机身单元以及所述主机翼单元;
动力单元,所述动力单元与所述机身单元的另一端相连,所述主机翼单元位于所述起落架与所述动力单元之间,所述动力单元包括驱动机构和控制机构,所述动力单元用于带动所述机身单元、所述主机翼单元以及所述起落架运动,所述控制机构用于控制所述机身单元、所述主机翼单元以及所述起落架的运动方向。
优选地,所述折叠机构包括第一驱动器、滑动杆、安装块以及滑动块,所述滑动杆以及所述安装块均固定于所述机身外壳内,所述滑动杆平行于所述机身外壳的长度方向,所述滑动块可滑动地设置于所述滑动杆上,所述第一驱动器与所述滑动块传动相连;所述后掠主机翼包括两个第一翼片,两个所述第一翼片以所述机身外壳的轴线为对称轴对称设置,所述前掠主机翼包括两个第二翼片,两个所述第二翼片以所述机身外壳的轴线为对称轴对称设置,所述第一翼片的一端伸入所述机身外壳中并与所述安装块铰接,所述第一翼片的另一端与所述第二翼片的一端铰接,所述第二翼片的另一端伸入所述机身外壳中并与所述滑动块铰接,所述后掠主机翼和所述前掠主机翼处于展开状态时,所述第一翼片和所述第二翼片围成菱形结构。
优选地,所述第一翼片上还设置有副翼,所述副翼可转动地与所述第一翼片相连且二者一一对应,所述机身外壳内设置有第二驱动器,所述第二驱动器与所述副翼传动相连。
优选地,所述折叠机构还包括驱动轮、绕线轮和牵引线,所述驱动轮以及所述绕线轮均可转动地设置于所述机身外壳内,所述第一驱动器与所述驱动轮相连,所述牵引线绕过所述驱动轮以及所述绕线轮并与所述滑动块相连。
优选地,所述滑动杆的数量为两根,两根所述滑动杆平行设置,所述滑动块可滑动地套装于所述滑动杆的外部;所述滑动杆为空心杆结构,所述滑动杆以及所述滑动块均由碳纤维材质制成。
优选地,所述起落架包括第三驱动器、连接环和支撑片,所述第三驱动器固定于所述机身外壳内,所述连接环与所述机身外壳相连,所述支撑片与所述连接环铰接,所述支撑片的数量为多片,所述支撑片绕所述机身外壳的轴线周向均布,所述第三驱动器利用连杆组件与所述支撑片相连,所述第三驱动器能够带动所述支撑片翻转。
优选地,所述连杆组件包括驱动杆、第一联动杆、连接件和第二联动杆,所述驱动杆的一端与所述第三驱动器相连,所述驱动杆的另一端与所述第一联动杆的一端铰接,所述第一联动杆的另一端与所述连接件铰接,所述第二联动杆连接所述连接件以及所述支撑片,且所述第二联动杆分别与所述连接件以及所述支撑片铰接,所述第二联动杆与所述支撑片一一对应;所述驱动杆与所述第一联动杆的铰接位置能够调整。
优选地,所述驱动机构包括安装座、第四驱动器和两组螺旋桨,所述安装座与所述机身外壳相连,所述第四驱动器设置于所述安装座上,所述第四驱动器包括两个驱动电机,所述驱动电机能够带动所述螺旋桨转动且二者一一对应,所述螺旋桨可转动地与所述驱动电机相连,所述螺旋桨相对于所述驱动电机的转动轴线垂直于所述驱动电机的输出轴转动轴线。
优选地,所述安装座包括内环和外环,所述第四驱动器设置于所述内环上,所述内环可转动地与所述外环相连,所述外环可转动地与所述机身外壳相连,所述内环以及所述外环均连接有第五驱动器。
优选地,所述控制机构包括安装板、尾翼和第六驱动器,所述安装板固定于所述机身外壳中,所述第六驱动器固定于所述安装板上,所述尾翼的一端可转动地与所述安装板相连,所述第六驱动器与所述尾翼传动相连;所述尾翼的数量为两个,两个所述尾翼以所述机身外壳的轴线为对称轴对称设置,两个所述尾翼能够合拢。
本发明相对于现有技术取得了以下技术效果:
本发明的水空两栖跨介质无人飞行器,主机翼单元包括后掠主机翼和前掠主机翼,折叠机构能够带动后掠主机翼和前掠主机翼展开以及收拢,飞行器处于起飞阶段时,后掠主机翼和前掠主机翼折叠收拢,减小飞行器起飞阻力,起落架处于展开状态,以支撑飞行器,实现飞行器垂直起飞,降低飞行器对起飞场地的要求;驱动机构驱动飞行器起飞,起落架合拢,飞行器在空中到达一定高度时,主机翼单元展开,此时飞行器进入固定翼飞行状态,飞行器滑翔,控制机构能够控制飞行器的飞行方向;当飞行器需要跨介质进入水中时,起落架向下,主机翼单元收拢,减小飞行器入水阻力,飞行器俯冲入水;飞行器进入水下后,利用储水机构蓄水以增大机身单元的质量,使飞行器到达作业深度,到达水下一定的作业深度后,主机翼单元展开,与在空中飞行的姿态相一致,动力单元驱动飞行器运动并控制飞行器运动方向;当飞行器作业完成需要出水时,主机翼单元收拢,储水机构排水,飞行器质量减小后上升,动力单元驱动飞行器上升,起落架展开,飞行器可降落至地面上或其它设备上。本发明的水空两栖跨介质无人飞行器,利用主机翼单元的展开和收拢,使飞行器能够实现固定翼飞行模式,同时避免了主机翼影响飞行器的起降和跨越介质,并利用起落架的展开和合拢,降低了飞行器的起降条件限制,在保证飞行器飞行性能的前提下,提高了飞行器的灵活适应性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
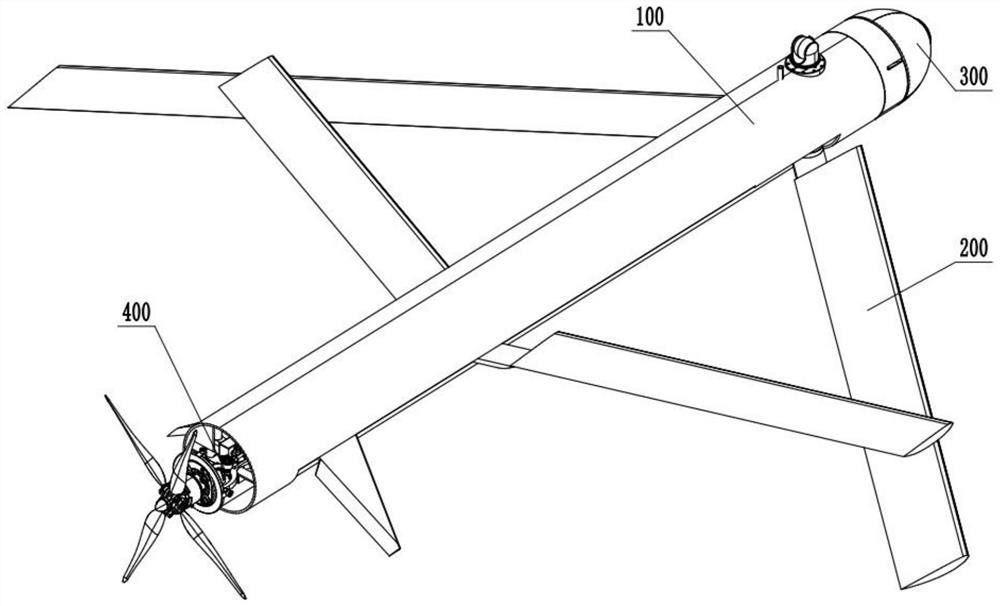
图1为本发明的水空两栖跨介质无人飞行器的结构示意图;
图2为本发明的水空两栖跨介质无人飞行器的其他角度的结构示意图;
图3为本发明的水空两栖跨介质无人飞行器的主机翼单元的结构示意图;
图4为本发明的水空两栖跨介质无人飞行器的起落架的部分结构示意图;
图5为本发明的水空两栖跨介质无人飞行器的动力单元的结构示意图;
图6为本发明的水空两栖跨介质无人飞行器垂直起飞时的示意图;
图7为本发明的水空两栖跨介质无人飞行器飞行时的示意图;
图8为本发明的水空两栖跨介质无人飞行器准备入水时的示意图;
图9为本发明的水空两栖跨介质无人飞行器入水时的示意图;
图10为本发明的水空两栖跨介质无人飞行器水中潜行时的示意图;
图11为本发明的水空两栖跨介质无人飞行器出水时的示意图;
图12为本发明的水空两栖跨介质无人飞行器的起落架展开时的示意图。
其中,100为机身单元,200为主机翼单元,300为起落架,400为动力单元;
1为机身外壳,2为后掠主机翼,3为前掠主机翼,4为驱动机构,5为控制机构,6为第一驱动器,7为滑动杆,8为安装块,9为滑动块,10为第一翼片,11为第二翼片,12为驱动轮,13为绕线轮,14为第三驱动器,15为连接环,16为支撑片,17为驱动杆,18为第一联动杆,19为连接件,20为第二联动杆,21为第四驱动器,22为螺旋桨,23为内环,24为外环,25为尾翼,26为安装板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种水空两栖跨介质无人飞行器,以解决上述现有技术存在的问题,在保证飞行器飞行性能的前提下,降低飞行器的起降难度,提高水空两栖跨介质无人飞行器的适应性。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
请参考图1-图12,其中,图1为本发明的水空两栖跨介质无人飞行器的结构示意图,图2为本发明的水空两栖跨介质无人飞行器的其他角度的结构示意图,图3为本发明的水空两栖跨介质无人飞行器的主机翼单元的结构示意图,图4为本发明的水空两栖跨介质无人飞行器的起落架的部分结构示意图,图5为本发明的水空两栖跨介质无人飞行器的动力单元的结构示意图,图6为本发明的水空两栖跨介质无人飞行器垂直起飞时的示意图,图7为本发明的水空两栖跨介质无人飞行器飞行时的示意图,图8为本发明的水空两栖跨介质无人飞行器准备入水时的示意图,图9为本发明的水空两栖跨介质无人飞行器入水时的示意图,图10为本发明的水空两栖跨介质无人飞行器水中潜行时的示意图,图11为本发明的水空两栖跨介质无人飞行器出水时的示意图,图12为本发明的水空两栖跨介质无人飞行器的起落架展开时的示意图。
本发明提供一种水空两栖跨介质无人飞行器,包括机身单元100、主机翼单元200、起落架300和动力单元400,其中,机身单元100包括机身外壳1和储水机构,储水机构设置于机身外壳1内,储水机构能够通过给排水改变机身单元100的质量;主机翼单元200包括折叠机构、后掠主机翼2和前掠主机翼3,折叠机构设置于机身外壳1内,后掠主机翼2以及前掠主机翼3均与折叠机构相连,折叠机构能够带动后掠主机翼2和前掠主机翼3展开和收拢,当后掠主机翼2和前掠主机翼3处于收拢状态时,后掠主机翼2和前掠主机翼3均平行于机身外壳1的长度方向;起落架300与机身单元100的一端相连,起落架300能够展开和合拢,起落架300展开时能够支撑机身单元100以及主机翼单元200;动力单元400与机身单元100的另一端相连,主机翼单元200位于起落架300与动力单元400之间,动力单元400包括驱动机构4和控制机构5,动力单元400用于带动机身单元100、主机翼单元200以及起落架300运动,控制机构5用于控制机身单元100、主机翼单元200以及起落架300的运动方向。
本发明的水空两栖跨介质无人飞行器,主机翼单元200包括后掠主机翼2和前掠主机翼3,折叠机构能够带动后掠主机翼2和前掠主机翼3展开以及收拢,飞行器处于起飞阶段时,后掠主机翼2和前掠主机翼3折叠收拢,减小飞行器起飞阻力,起落架300处于展开状态,以支撑飞行器,实现飞行器垂直起飞,降低飞行器对起飞场地的要求;驱动机构4驱动飞行器起飞,起落架300合拢,飞行器在空中到达一定高度时,主机翼单元200展开,此时飞行器进入固定翼飞行状态,飞行器滑翔,控制机构5能够控制飞行器的飞行方向;当飞行器需要跨介质进入水中时,起落架300向下,主机翼单元200收拢,减小飞行器入水阻力,飞行器俯冲入水;飞行器进入水下后,利用储水机构蓄水以增大机身单元100的质量,使飞行器到达作业深度,到达水下一定的作业深度后,主机翼单元200展开,与在空中飞行的姿态相一致,动力单元400驱动飞行器运动并控制飞行器运动方向;当飞行器作业完成需要出水时,主机翼单元200收拢,储水机构排水,飞行器质量减小后上升,动力单元400驱动飞行器上升,起落架300展开,飞行器可降落至地面或其它设备上。本发明的水空两栖跨介质无人飞行器,利用主机翼单元200的展开和收拢,使飞行器能够实现固定翼飞行模式,同时避免了主机翼影响飞行器的起降和跨越介质,并利用起落架300的展开和合拢,降低了飞行器的起降条件限制,在保证飞行器飞行性能的前提下,提高了飞行器的灵活适应性。
需要解释说明的是,储水机构包括储水舱和蠕动泵,蠕动泵与储水舱相连通,储水舱设置于机身外壳1内,当飞行器进入水下后,储水舱能够利用蠕动泵蓄水,增大飞行器质量,使飞行器顺利下潜,当飞行器上升时,储水舱利用蠕动泵向外排水,使飞行器在浮力作用以及动力单元400的驱动下顺利上升。
具体地,折叠机构包括第一驱动器6、滑动杆7、安装块8以及滑动块9,详见图3,滑动杆7以及安装块8均固定于机身外壳1内,滑动杆7平行于机身外壳1的长度方向,滑动块9可滑动地设置于滑动杆7上,第一驱动器6与滑动块9传动相连;后掠主机翼2包括两个第一翼片10,两个第一翼片10以机身外壳1的轴线为对称轴对称设置,前掠主机翼3包括两个第二翼片11,两个第二翼片11以机身外壳1的轴线为对称轴对称设置,第一翼片10的一端伸入机身外壳1中并与安装块8铰接,第一翼片10的另一端与第二翼片11的一端铰接,第二翼片11的另一端伸入机身外壳1中并与滑动块9铰接,后掠主机翼2和前掠主机翼3处于展开状态时,第一翼片10和第二翼片11围成菱形结构。第一驱动器6能够带动滑动块9沿滑动杆7往复滑动,从而带动第二翼片11的展开和收拢,进而利用第二翼片11带动第一翼片10转动,形成并联翼结构,实现主机翼单元200的展开和收拢,使得主机翼单元200适应飞行器的各种工作状态。
还需要说明的是,第一翼片10上还设置有副翼,副翼可转动地与第一翼片10相连且二者一一对应,机身外壳1内设置有第二驱动器,第二驱动器与副翼传动相连,第二驱动器控制副翼的转动,方便调整飞行器飞行状态。
在本具体实施方式中,折叠机构还包括驱动轮12、绕线轮13和牵引线,驱动轮12以及绕线轮13均可转动地设置于机身外壳1内,第一驱动器6与驱动轮12相连,牵引线绕过驱动轮12以及绕线轮13并与滑动块9相连,第一驱动器6带动驱动轮12转动,进而与绕线轮13相配合带动牵引线运动,牵引线带动滑动块9滑动,第一驱动器6可选择步进电机,通过改变驱动轮12的转动方向,改变牵引线对滑动块9的拉动方向,实现牵引线带动滑动块9沿滑动杆7往复滑动,滑动块9带动第二翼片11转动,实现主机翼单元200的展开和合拢。
为了提高滑动块9的往复运动精度,滑动杆7的数量为两根,两根滑动杆7平行设置,滑动块9可滑动地套装于滑动杆7的外部,设置两根滑动杆7有效避免了滑动块9的转动错位,提高了前掠主机翼3的运动准确度,同时保证了后掠主机翼2的正常工作。另外,为了减轻飞行器质量,滑动杆7为空心杆结构,滑动杆7以及滑动块9均由碳纤维材质制成,在保证折叠机构结构强度的同时,减轻折叠机构质量,有利于降低飞行器能耗,提升飞行性能。
更具体地,起落架300包括第三驱动器14、连接环15和支撑片16,第三驱动器14固定于机身外壳1内,连接环15与机身外壳1相连,支撑片16与连接环15铰接,支撑片16的数量为多片,多片支撑片16绕机身外壳1的轴线周向均布,第三驱动器14利用连杆组件与支撑片16相连,第三驱动器14能够带动支撑片16翻转。第三驱动器14带动支撑片16转动进而实现起落架300的合拢和展开,在起落架300展开时,支撑片16远离连接环15的一端作为“支撑腿”,起到支撑飞行器的作用,方便飞行器的起降,降低飞行器的起降要求,支撑片16绕机身外壳1的轴线轴向均布,提高了支撑片16的受力均匀性。在起落架300合拢时,相邻的支撑片16相抵并形成类似椭球面的曲面结构,降低飞行器飞行和潜行过程中的阻力。在本具体实施方式中,支撑片16的数量为三片,结构紧凑,展开时支撑稳定。
在本发明的其他具体实施方式中,连杆组件包括驱动杆17、第一联动杆18、连接件19和第二联动杆20,如图4所示,驱动杆17的一端与第三驱动器14相连,驱动杆17的另一端与第一联动杆18的一端铰接,第一联动杆18的另一端与连接件19铰接,第二联动杆20连接连接件19以及支撑片16,且第二联动杆20分别与连接件19以及支撑片16铰接,第二联动杆20与支撑片16一一对应,第三驱动器14带动驱动杆17转动,进而利用第一联动杆18带动连接件19转运动,连接件19利用第二联动杆20与支撑片16铰接,因支撑片16同时与连接环15铰接,从而实现连接件19利用第二联动杆20带动支撑片16翻转的目的,且第二联动杆20与支撑片16一一对应,连接件19同时带动全部的支撑片16翻转,实现起落架300的展开和合拢。需要强调的是,驱动杆17与第一联动杆18的铰接位置能够调整,通过调整驱动杆17与第一联动杆18的铰接位置,从而达到调整连接件19运动行程的目的,调整支撑片16的翻转角度,调整起落架300的展开程度,有利于提高起落架300的工作可靠性。
进一步地,驱动机构4包括安装座、第四驱动器21和两组螺旋桨22,安装座与机身外壳1相连,第四驱动器21设置于安装座上,第四驱动器21包括两个驱动电机,驱动电机能够带动螺旋桨22转动且二者一一对应,螺旋桨22可转动地与驱动电机相连,螺旋桨22相对于驱动电机的转动轴线垂直于驱动电机的输出轴转动轴线。螺旋桨22可选择4D螺旋桨,驱动电机可选择无刷电机,两个驱动电机叠加设置,上层的驱动电机的电机轴为空心结构,下层的驱动电机的电机轴反向加长,穿过上层的驱动电机的电机轴后与螺旋桨22相连,两组螺旋桨22转动为飞行器提供动力来源,同轴对转的两组螺旋桨22能够抵消反向扭矩,控制两组螺旋桨22的转速差还能够使飞行器产生给定角度的旋转。另外,螺旋桨22还能够相对于驱动电机转动,在飞行器入水时,螺旋桨22收拢,进一步降低飞行器入水阻力。
与此同时,安装座包括内环23和外环24,第四驱动器21设置于内环23上,内环23可转动地与外环24相连,外环24可转动地与机身外壳1相连,内环23以及外环24均连接有第五驱动器,两个第五驱动器分别带动内环23和外环24转动,从而在飞行器机身处于竖直状态飞行时调整飞行器飞行方向。在本具体实施方式中,第五驱动器与外环24之间以及第五驱动器与内环23之间均设置拉杆组件,实现内环23以及外环24的转动。
更进一步地,控制机构5包括安装板26、尾翼25和第六驱动器,安装板26固定于机身外壳1中,第六驱动器固定于安装板26上,尾翼25的一端可转动地与安装板26相连,第六驱动器与尾翼25传动相连;尾翼25的数量为两个,两个尾翼25以机身外壳1的轴线为对称轴对称设置,第六驱动器带动尾翼25运动,两个尾翼25能够合拢。尾翼25同时兼具垂尾和平尾的作用,能够起到纵向和航向稳定作用,且尾翼25具有舵面,当两个尾翼25的舵面向相同方向偏转时,其升降舵作用,相反地,两边舵面向不同方向偏转时,则起方向舵作用。尾翼25采用V型尾翼,V型尾翼大仰角可控性较好,隐身性得以提升。除此之外,动力单元400还包括电源,电源为各单元提供电力来源,设置电源为本领域技术人员的惯用手段,此处不再赘述。
本发明的水空两栖跨介质无人飞行器,在垂直起飞阶段,由于起落架300可以保证使其在船舶甲板垂直起飞,整个起飞阶段,主机翼单元200和尾翼25都处于折叠状态,可以最大限度减少外界因素对其干扰,依靠其尾部驱动机构4的共轴对称的两组螺旋桨22实现空中位置的改变,螺旋桨22的矢量控制是由两个舵机协同完成,相较于常规滑跑起飞的固定翼飞行器来说,在起飞阶段该型飞行器可以极大降低起飞阶段对场地的要求。
在垂直起飞阶段末期,飞行器到达一定高度后,驱动机构4停机,与此同时主机翼单元200和尾翼25完全展开,飞行器进入自主滑翔阶段,之后共轴对转的两组驱动电机反转,由于螺旋桨22采用4D螺旋桨,驱动电机反转仍可保证足够的推力。驱动机构4二次开机后,飞行器进入平飞模式,这个模式飞行器转换为腰推式固定翼飞机,可实现高速长距离巡航。
到达指定巡视区域上空后,驱动机构4再次停机,主机翼单元200和尾翼25折叠,驱动电机反转将机身拉起,使机头垂直向下,此时的飞行器可在驱动机构4作用下实现悬停凝视目标,随时准备入水。根据作业任务情况,该型飞行器具备高速和低速两种入水模式。在高速入水模式下,飞行器入水前驱动机构4停机,主机翼单元200和尾翼25都处于折叠状态,由高空呈俯冲式入水。在低速入水时,依靠驱动机构4产生的拉力来减缓下落速度,从而达到使飞行器匀速入水的目的。
完全入水姿态达到稳定后,蠕动泵开始向储水舱内的橡胶蓄水囊中泵水,由于水的泵入致使飞行器整体重力逐渐增加,当重力大于其所受浮力时,飞行器可实现潜水。潜水阶段,主机翼单元200和尾翼25处于完全展开状态,其姿态控制和空中一致,第一翼片10的副翼用来控制机身滚转,尾翼25和驱动机构4耦合控制偏航和俯仰,同时可以通过蠕动泵将水从储水舱排出减轻整体重量从而实现上浮动作。
在出水阶段,出水前飞行器的主机翼单元200和尾翼25折叠,驱动电机正转产生拉力,将机身调整至竖直状态,蠕动泵动作,储水舱内水逐渐排出,螺旋桨22逐渐露出水面,螺旋桨22在空气中产生拉力将机身从水中拉出。任务完成后,飞行器可以实现陆地垂直降落回收、舰船甲板降落回收、水下潜艇回收等多种回收方式进行灵活回收,从而可降低其使用成本。
本发明的水空两栖跨介质无人飞行器,利用主机翼单元200的展开和收拢,使飞行器能够实现固定翼飞行模式,同时利用起落架300的展开和合拢,降低了飞行器的起降条件限制,在保证飞行器飞行性能的前提下,提高了飞行器的灵活适应性。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种水空两栖搜救支援无人飞行器系统
- 一种水空两栖跨介质无人飞行器
- 水空两栖跨介质无人飞行器控制系统