一种紧凑环注入装置中探测用往复式摆臂探针
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及核聚变领域,具体是一种紧凑环注入装置中探测用往复式摆臂探针。
背景技术
中国聚变工程实验堆(CFETR)确立了两个主要的目标,分别是实现1GW的稳态聚变功率以及实现氚自持。现有的研究结果表明,将燃料粒子(氘和氚)直接注入芯部等离子体既能够显著提高芯部等离子体的聚变功率,同时能显著降低对氚增值率(TBR)的要求,进而实现CFETR氚自持的目标。芯部加料已经成为控制聚变燃烧等离子体的核心手段之一。现有的加料手段,如补充送气,超声分子束以及弹丸均难以实现芯部加料。CT(紧凑环)注入是目前最有可能实现芯部加料的方案。
在紧凑环注入装置中,需要对等离子体进行诊断。等离子体是一种有带电粒子和自由电子为主要成分的物质形态,可以理解为电离的气体,该形态的物质广泛存在于宇宙之中,也是宇宙中含量最多的物质形态,常被视为是物质的第四态,被称为等离子态。等离子体特性诊断是一门测定等离子体特性的技术。
探针法是等离子体特性诊断中比较直接的基本方法,这个方法就是把一个探针放入被诊断的等离子体内,通过实体探针探测到等离子体的某些参量。目前常用的探针包括静电探针、磁探针、电导率探针等,而目前这些常用的探针是对单一位置进行测量,而仅对单一位置进行测量,测量到的数据可能不是最为准确的数据,为了得到更为准确的实验数据需要对其他位置进行测量,在对其他位置进行测量时需重新调整探针位置,这样反复操作不仅耗时长,还极易损伤实验器材。
发明内容
为解决上述背景技术中提到的不足,本发明的目的在于提供一种紧凑环注入装置中探测用往复式摆臂探针通过探针的往复式摆臂可以实现对紧凑环注入装置内多位置测量等离子体参数。
本发明的目的可以通过以下技术方案实现:
一种紧凑环注入装置中探测用往复式摆臂探针,包括动力驱动装置模块、动力传动装置模块、探针装置模块、承载平台模块和装置外壳,动力传动装置模块连接在动力驱动装置模块和探针装置模块之间,探针装置模块设置在承载平台模块之上,承载平台模块设置在装置外壳之内。动力驱动装置模块的步进电机是驱动探测用探针工作的机构,传动装置模块中的传动齿轮一、传动齿轮二、滚珠丝杠和探针装置模块中的圆柱齿轮是使探针往复式摆臂的机构。
进一步地,所述动力驱动装置模块包括步进电机、旋转轴及旋转轴外壳,步进电机设置在装置外壳之外,并使用螺栓固定在装置外壳上,旋转轴的一端通过平键与步进电机的前端伸出轴向连接,另一端穿过支架上方的通孔,通过深沟球轴承固定在支架上,旋转轴外壳轴向套在旋转轴上,一端固定在装置外壳上,另一端与支架连接。
进一步地,动力传动装置模块包括传动齿轮一、传动齿轮二、滚珠丝杠、丝杠挡圈,旋转轴与传动齿轮一通过平键轴向连接,传动齿轮一位于传动齿轮二的正上方,两者都设置在支架的空隙内,传动齿轮二与滚珠丝杠通过平键连接,滚珠丝杠包括螺纹杆和滑块齿条,滑块齿条套在螺纹杆上,在螺纹杆的前后两端都设有丝杠挡圈,并与螺纹杆紧贴在一起,防止滑块齿条脱离螺纹杆,滚珠丝杠设置在齿条坐的中央位置,通过深沟球轴承与侧板连接,并穿过前后侧板的两个通孔。
进一步地,探针装置模块包括圆柱齿轮、探针组件、探针外壳,圆柱齿轮位于滑块齿条的正上方,并通过轴与深沟球轴承固定在齿条座上方的两个通孔之间,滑块齿条与圆柱齿轮通过齿轮齿条配合,带动圆柱齿轮的转动,探针组件设置在圆柱齿轮上方的圆柱筒内,探针外壳轴向套在圆柱齿轮上方的圆柱筒上。
进一步地,承载平台模块包括齿条座、支架、侧板、支撑平台、连接杆,连接杆的前端固定在装置外壳上,并穿过支撑平台两侧的穿孔,后端连接在支撑平台上,支架设置在支撑平台的上方,齿条座设置在支架的中间位置,并通过螺栓固定在支架上,侧板设置在齿条座的前后方,并成90°夹角通过螺栓与齿条座连接在一起。
本发明的有益效果:
1、本发明动力传动装置模块中的传动齿轮一、传动齿轮二及滚珠丝杠是使探针往复式移动的机构,通过探针的往复式移动,可实现对紧凑环注入装置中内部实验参数的多点位置测量,可以减少拆卸装置来调整探针位置的次数,有效的降低对实验设备的损伤也可以有效缩短实验所需的时间。
2、本发明探针组件安装在圆柱齿轮上方的圆柱套筒内,圆柱齿轮与滑块齿条通过齿轮齿条配合,滑块齿条前后移动,来带动圆柱齿轮的转动,以实现探针的摆臂转动,当需要测量内部实验参数时,将探针转动到被测对象内部,测量结束后,再将探针摆臂转动收回,从而不会破坏被测对象的状态。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图;
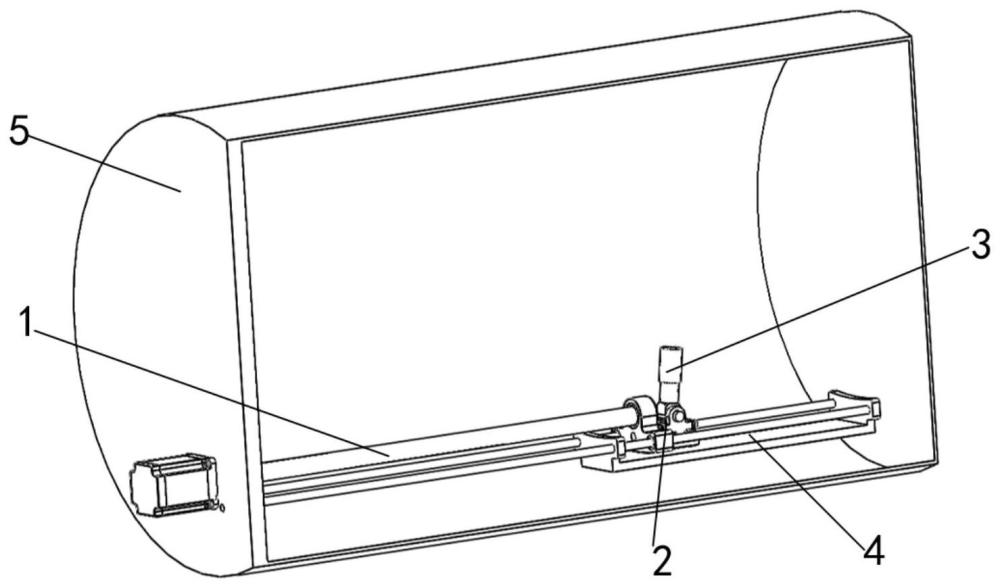
图1为本发明紧凑环注入装置中探测用往复式摆臂探针整体图;
图2为本发明动力驱动装置模块整体图;
图3为本发明动力驱动装置模块爆炸图;
图4为本发明动力传动装置和探测装置模块整体图;
图5为本发明动力传动装置模块爆炸图;
图6为本发明探针装置模块爆炸图;
图7为本发明承载平台装置整体图;
图8为本发明承载平台装置爆炸图。
图中附图标记如下:
动力驱动装置模块1、动力传动装置模块2、探针装置模块3、承载平台模块4、装置外壳5、步进电机101、螺栓102、旋转轴103、旋转轴外壳104、平键105、传动齿轮一201、传动齿轮二202、平键203、平键204、深沟球轴承205、滚珠丝杠206、螺纹杆207、滑块齿条208、丝杠挡圈209、深沟球轴承210、圆柱齿轮301、探针组件302、探针外壳303、轴304、深沟球轴承305、支架401、齿条座402、侧板403、螺栓404、螺栓405、支撑平台406、连接杆407。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
一种紧凑环注入装置中探测用往复式摆臂探针,如图1所示,包括动力驱动装置模块1、动力传动装置模块2、探测用探针装置模块3、承载平台模块4及装置外壳5。动力传动装置模块2连接在动力驱动装置模块1和探针装置模块3之间,探针装置模块3设置在承载平台模块4之上,动力驱动装置模块1中的步进电机101是驱动整个装置工作的机构,动力传动装置模块2中的传动齿轮一201、传动齿轮二202、滚珠丝杠206及探针装置模块3中的圆柱齿轮301是控制探针移动的机构,即往复式摆臂,从而实现该装置机构最主要的往复式摆臂的功能。
如图2和3所示,动力驱动装置模块1主要包括步进电机101、旋转轴103、旋转轴外壳104,步进电机101设置在装置外壳5之外,并使用螺栓102固定在装置外壳5上,旋转轴103的一端通过平键105与步进电机101的前端伸出轴向连接,另一端穿过支架401上方的通孔,通过深沟球轴承205固定在支架401上,旋转轴外壳104轴向套在旋转轴103上,一端固定在装置外壳5上,另一端与支架401连接。
如图4和5所示,动力传动装置模块2包括传动齿轮一201、传动齿轮二202、滚珠丝杠206、丝杠挡圈209,旋转轴103与传动齿轮一201通过平键203连接,传动齿轮一201位于传动齿轮二202的正上方,并带动传动齿轮二202转动,传动齿轮一201与传动齿轮二202都设置在支架401的空隙内,传动齿轮二202与滚珠丝杠206通过平键204连接,并带动滚珠丝杠206的转动,来实现探针的往复式移动,滚珠丝杠206包括螺纹杆207和滑块齿条208,滑块齿条208套在螺纹杆207上,在螺纹杆207的前后两端设有丝杠挡圈209,丝杠挡圈209紧贴在螺纹杆207的前后两端,防止滑块齿条208脱离螺纹杆207,滚珠丝杠206设置在齿条座402的中央位置,通过深沟球轴承210与侧板403连接,并穿过前后侧板403的两个通孔。
如图4和6所示,探针装置模块3包括圆柱齿轮301、探针组件302、探针外壳303,圆柱齿轮301设置在滑块齿条208的正上方,并通过轴304和深沟球轴承305固定在齿条座402上方的两个通孔之间,滑块齿条208与圆柱齿轮301通过齿轮齿条配合,带动圆柱齿轮301的转动,实现探针的摆臂式转动,探针组件302设置在圆柱齿轮301上方的圆柱套筒内,探针外壳303轴向套在圆柱齿轮301上方的圆柱套筒上。
如图7和8所示,承载平台模块包括齿条座402、支架401、侧板403、支撑平台406、连接杆407,连接杆407的一端固定在装置外壳5上,并穿过支撑平台406两侧的通孔,另一端连接在支撑平台406上,支架401设置在支撑平台406上方,齿条座402设置在支架401的中央,并通过螺栓404固定在支架401上,侧板403设置在齿条座402的前后方,并成90°夹角通过螺栓405与齿条座402连接在一起。
如图1-图8所示,动力驱动装置模块1中的步进电机101带动旋转轴103转动,旋转轴103将动力传递给动力传动装置模块2中的传动齿轮一201、传动齿轮二202、滚珠丝杠206及探针装置模块3中的圆柱齿轮301,通过齿轮传动和齿轮齿条传动,以实现探针的往复式摆臂移动。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。