一种RPV整体螺栓拉伸机的对中执行装置
文献发布时间:2023-06-19 19:40:14
技术领域
本发明涉及一种对中执行装置,特别涉及用于RPV整体螺栓拉伸机与反应堆压力容器的自动对中。
背景技术
RPV整体螺栓拉伸机是用于压水堆核电站在停堆换料时,反应堆压力容器的关盖和开盖必需的设备。在关盖或开盖作业过程中,要首先确保RPV整体螺栓拉伸机与反应堆压力容器对中,使其能顺利就位在压力容器上,进而可以安全、可靠、平稳的旋入或旋出主螺栓。
现有的RPV整体螺栓拉伸机对中技术采用人工手动对中,在RPV整体螺栓拉伸机吊装进入反应堆压力容器顶盖法兰的堆顶导轨后,人工手动将RPV整体螺栓拉伸机上的四组顶杆推至固定位置并保持,RPV整体螺栓拉伸机沿堆顶导轨直接下降就位至反应堆压力容器顶盖法兰上开始作业,现有技术应用存在以下不足:
1)自动化程度较低,全程需人工操作,作业强度较大;
2)对中操作所需时间较长,增加作业人员的受辐照剂量;
3)对中精度较低,主螺栓旋入旋出作业过程螺纹损伤风险较大。
发明内容
为解决上述问题,本发明提供一种RPV整体螺栓拉伸机的对中执行装置,包含伺服推力装置及电控箱,伺服推力装置分为伺服推力装置一、伺服推力装置二、伺服推力装置三、伺服推力装置四。
所述的伺服推力装置一和伺服推力装置二布置在堆顶导轨一两侧,伺服推力装置三和伺服推力装置四布置在堆顶导轨二两侧。
所述的伺服推力装置包含电动推杆和推轮。
所述的电动推杆,包含电机、齿轮箱、螺母丝杠组件,通过电机、齿轮箱传动,丝杠可实现伸出缩回动作。
所述的电动推杆,通过底座安装在RPV整体螺栓拉伸机支撑环上。
所述的推轮,与电动推杆丝杆直接连接。
所述的推轮包含支架、销轴和滚轮,销轴穿过滚轮与支架固定。
所述的电控箱,包含电源模块及控制模块,电源模块为电机提供动力电源,控制模块可根据RPV整体螺栓拉伸机控制系统提供的位置信号,对电动推杆的伸出缩回动作进行伺服控制。
RPV整体螺栓拉伸机的对中过程,在平面直角坐标系内,可以分解为以下动作:沿X轴方向的平移动作、沿Y轴方向的平移动作及绕原点O的旋转动作。本发明所述的一种RPV整体螺栓拉伸机对中执行装置,通过RPV整体螺栓拉伸机控制系统提供的位置信号,控制4组独立的伺服推力装置伸出/缩回,通过推轮与固定在压力容器顶盖法兰上的堆顶导轨的反作用力,驱动RPV整体螺栓拉伸机可实现X轴方向的平移、Y轴方向的平移及绕原点O的旋转动作,从而实现RPV整体螺栓拉伸机任意偏差位置的移动及定位,自动完成RPV整体螺栓拉伸机与反应堆压力容器的对中。
本发明具有以下优点及突出性的技术效果:
1)自动化程度较高,无需人工操作;
2)对中精度高,保证了主螺栓旋入/旋出作业的安全、可靠;
3)对中操作时间短,减小作业人员的受辐照剂量。
附图说明
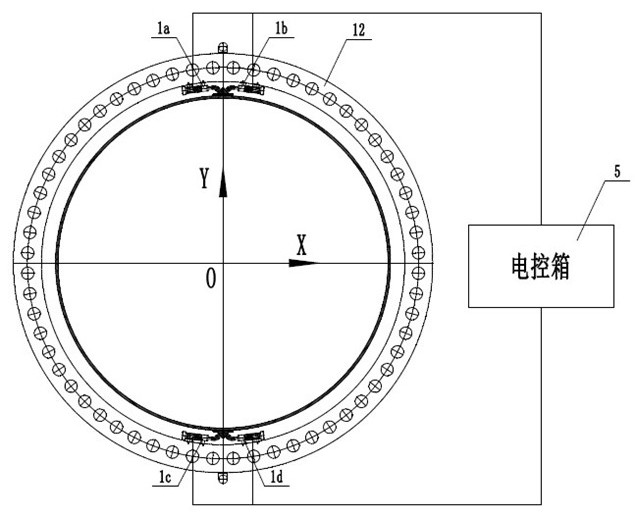
图1是本发明工况示意图。
图2、图7是本发明结构的布置示意图。
图3是图2的局部放大图。
图4、图5、图6、图8、图9是本发明结构示意图。
图中:
1a—伺服推力装置一,1b—伺服推力装置二,1c—伺服推力装置三,1d—伺服推力装置四,2—电动推杆,21—电机,22—齿轮箱,23—螺母丝杠组件,24—底座,3—推轮,31—支架,32—销轴,33—滚轮, 4—液压缸,41—油缸,42—活塞,43—底座,5—电控箱,6—液压控制箱。
7—堆顶导轨一,8—堆顶导轨二,9—主螺栓,10—顶盖法兰,11—筒体法兰,12—RPV整体螺栓拉伸机支撑环。
具体实施方式
本发明提供的一种RPV整体螺栓拉伸机的对中执行装置,RPV整体螺栓拉伸机在吊装状态下,采用四组伺服推力装置控制推轮的伸出/缩回,通过与堆顶导轨的反作用力,实现RPV整体螺栓拉伸机在平面内的平移、旋转及位置保持,完成与反应堆压力容器的对中。
本发明所述的伺服推力装置,有2种实施方式,以下对2种实施方式分别进行说明:
下面以图1——图6为例,对本发明具体实施方式一进行说明:
本发明所述的一种RPV整体螺栓拉伸机对中执行装置,包含伺服推力装置1及电控箱5。
所述的伺服推力装置1,分为伺服推力装置一1a、伺服推力装置二1b、伺服推力装置三1c、伺服推力装置四1d。
所述的伺服推力装置一1a和伺服推力装置二1b布置在堆顶导轨一7两侧,伺服推力装置三1c和伺服推力装置四1d布置在堆顶导轨二8两侧。
所述的伺服推力装置1包含电动推杆2和推轮3。
所述的电动推杆2,包含电机21、齿轮箱22、螺母丝杠组件23及底座24,通过电机21、齿轮箱22传动,螺母丝杠23的丝杆可实现伸出缩回动作。
所述的电动推杆2通过底座24安装在RPV整体螺栓拉伸机支撑环12上。
所述的推轮3与电动推杆2相连接。
所述的推轮3主要包含支架31、销轴32和滚轮33,销轴32穿过滚轮33 与支架31固定。
所述的电控箱5,包含电源模块及控制模块,电源模块为电机提供动力电源,控制模块可根据RPV整体螺栓拉伸机控制系统提供的位置信号,对电动推杆的伸出缩回动作进行伺服控制。
下面以图1、图6、图7、图8、图9为例,对本发明具体实施方式二进行说明:
本发明所述的一种RPV整体螺栓拉伸机对中执行装置,包含伺服推力装置1及液压控制箱6。
所述的伺服推力装置1,分为伺服推力装置一1a、伺服推力装置二1b、伺服推力装置三1c、伺服推力装置四1d。
所述的伺服推力装置一1a和伺服推力装置二1b布置在堆顶导轨一7两侧,伺服推力装置三1c和伺服推力装置四1d布置在堆顶导轨二8两侧。
所述的伺服推力装置1包含液压缸4和推轮3。
所述的液压缸4,含油缸41、活塞42及底座43,通过高压介质的推动,活塞42可实现伸出缩回动作。
所述的液压缸4通过底座43安装在RPV整体螺栓拉伸机支撑环12上。
所述的推轮3与活塞42相连接。
所述的推轮3主要包含支架31、销轴32和滚轮33,销轴32穿过滚轮33 与支架31固定。
所述的液压控制箱6,包含动力单元及控制单元,动力单元为液压缸提供高压介质,控制单元可根据RPV整体螺栓拉伸机控制系统提供的位置信号,对液压缸4活塞42的伸出缩回进行伺服控制。
下面以图2为例,对本发明作进一步的说明:
RPV整体螺栓拉伸机的对中过程,在图2的平面直角坐标系内,可以分解为以下动作:沿X轴方向的平移动作、沿Y轴方向的平移动作及绕原点O的旋转动作。一种RPV整体螺栓拉伸机对中执行装置的4组独立的伺服推力装置1,经电控箱5/液压控制箱6控制,相互配合可实现X轴方向的平移、Y轴方向的平移及绕原点O的旋转动作,从而实现RPV整体螺栓拉伸机任意偏差位置的移动及定位。
下面以RPV整体螺栓拉伸机沿图2的X轴、Y轴正方向及绕原点O顺时针动作为例,对本发明作进一步说明:
RPV整体螺栓拉伸机沿X轴正方向移动时,伺服推力装置1b、1d同时伸出,1a、1c同时缩回;RPV整体螺栓拉伸机沿Y轴正方向移动时,伺服推力装置1a、1b同时伸出,1c、1d同时缩回;RPV整体螺栓拉伸机绕原点O顺时针旋转时,伺服推力装置1b、1c同时伸出,1a、1d同时缩回。
本发明一种RPV整体螺栓拉伸机的对中执行装置,利用RPV整体螺栓拉伸机的位置反馈信号,采用四组伺服推力装置1驱动推轮3伸出/缩回,通过推轮3与固定在压力容器顶盖法兰10堆顶导轨7、8的反作用力,实现RPV整体螺栓拉伸机在平面内任意偏差位置的移动及定位,从而将RPV整体螺栓拉伸机定位至压力容器的对中位置。本发明提高了现有技术应用中的自动化水平,缩短了作业时间,减小了作业人员的劳动强度及受辐照时间。
上述具体实施方式,仅用于对本发明的设计构思进行解释说明,其作用是方便相关领域的技术人员理解与实施,而非对本发明权利保护范围的限定,因此利用本发明设计构思进行等同性改变,仍属于本发明的保护范围。