油烟机和油烟机控制方法
文献发布时间:2023-07-07 06:30:04
技术领域
本申请涉及厨房用具技术领域,具体地,涉及一种油烟机和油烟机控制方法。
背景技术
油烟机、灶具作为厨房用具已经被广泛应用。用户利用烹饪器具进行烹饪的过程中会产生油烟,通过使用油烟机,可以有效减少油烟。对于用户来说,不仅减少了其吸入的油烟量,保护了其身体健康,而且,保持了用户的厨房的清洁度。
现有技术中的油烟机的吸风口多为固定状态。换言之,油烟机一旦安装完毕,其吸风口相对于灶具的相对位置关系是不变的。在吸风口和灶具之间,形成了一个特定的吸烟区域。
在油烟机的使用过程中,用户的烹饪方式千差万别,所使用的烹饪锅具形状各异。在各种不同的应用情况下,现有的油烟机的普适性较差,难以在保证用户方便地进行烹饪的前提下,一直保持良好的吸烟效果,影响了用户的体验。
发明内容
为了至少部分地解决现有技术中存在的问题,根据本申请的第一个方面,提供了一种油烟机。该油烟机包括机箱组件、集烟组件、第一驱动装置、测距装置、第二驱动装置和控制器,其中,集烟组件可升降地连接机箱组件,并且集烟组件上设置有吸风口;第一驱动装置连接集烟组件,用于驱动集烟组件升降;测距装置沿左右方向可移动地设置在机箱组件上且朝向下方,用于检测距离并生成测距信号;第二驱动装置连接测距装置,用于驱动测距装置周期性地沿左右方向移动;控制器连接第一驱动装置和测距装置,用于根据测距装置在前一预设时间段内的移动过程中生成的测距信号中的最小距离信息,控制第一驱动装置驱动集烟组件。
根据上述方案,该油烟机可以根据测距装置的实时移动测距,实现对集烟组件的实时升降控制。并且,由于工作中的测距装置可以在移动过程中实时获取其下方的多个位置的距离信息,因此可以实现对其下方的烹饪器具的状态的精确检测,由此可以实现对集烟组件的精准升降控制。进而可以在保证用户烹饪操作的方便性的前提下,大大提高油烟机吸油烟的效率,进而显著提高用户体验。
示例性地,测距装置包括左测距装置和右测距装置,左测距装置在对应于左炉头的、机箱组件的左侧范围内可左右移动,右测距装置在对应于右炉头的、机箱组件的右侧范围内可左右移动。
根据上述方案,该油烟机可以通过左右设置的两个测距装置同时进行测距。可以提高检测效率,进而可以提高控制器实时对集烟组件的控制效率。并且,还可以为根据两个炉头上的烹饪器具的不同状态对油烟机的其他组件进行灵活控制提供可能,以提高油烟机的可控性和用户体验。
示例性地,左侧范围包括对应于左炉头的右边缘向右第一距离的第一位置和/或对应于左炉头的左边缘向左第二距离的第二位置,右侧范围包括对应于右炉头的左边缘向左第三距离的第三位置和/或对应于右炉头的右边缘向右第四距离的第四位置。
根据上述方案,左测距装置和右测距装置均至少可以在对应于炉头的边缘的区域进行左右移动,以方便有效且准确地获取测距装置与炉头上的烹饪器具的最小距离,进而可以实现对集烟组件的准确控制,提高用户体验。
示例性地,第二驱动装置包括左驱动装置和右驱动装置,左驱动装置连接到左测距装置,右驱动装置连接到右测距装置,控制器还分别连接左驱动装置和右驱动装置,以分别控制左驱动装置和右驱动装置驱动对应的测距装置。
根据上述方案,油烟机的左测距装置和右测距装置还可以通过独立的驱动装置进行控制。这样避免测距装置的无效移动,从而可以减小能源消耗并提高油烟机寿命。此外,控制器可以协调控制第一驱动装置和第二驱动装置,进而统一调度集烟组件和所有的测距装置。例如,可以在左驱动装置驱动左测距装置由其移动范围的最左端移动到最右端同时右驱动装置驱动右测距装置由其移动范围的最左端移动到最右端之后,根据这段时间内2个测距装置分别生成的测距信号中的最小距离信息,控制第一驱动装置驱动集烟组件升降。由此,控制器能够有效利用2个测距装置所测得的所有测距信号,控制逻辑更简单,不容易发生控制错误。
示例性地,测距装置在对应于两个炉头的中心范围内可左右移动,中心范围的最左侧对应于左炉头的中心位置,中心范围的最右侧对应于右炉头的中心位置。
根据上述方案,可以通过一个测距装置,仅在对应于两个炉头的中心范围内左右移动来获取最小距离信息。既可以提高测距装置的检测效率,又可以减少控制器的计算量。
示例性地,测距装置的移动轨迹的水平投影与炉头的横向中心轴线的水平投影重合。
根据上述方案,测距装置的移动轨迹的水平投影可以与炉头的横向中心轴线的水平投影重合。这样可以有效且准确获取烹饪器具的最高点与测距装置的距离,从而便可以将集烟组件升降至最合适的高度,进而可以在方便用户烹饪操作的前提下,实现油烟机的高效使用。
示例性地,控制器还连接第二驱动装置,用于控制第二驱动装置驱动测距装置。
根据上述方案,控制器可以协调控制第一驱动装置和第二驱动装置。由此,控制器的控制逻辑更简单,不容易发生控制错误。
示例性地,吸风口上设置有可开合的导风板,控制器还用于根据最小距离信息,控制导风板的开合。
该油烟机可以根据测距装置的测距信号,对油烟机的两个导风板进行开合控制。在确保油烟机在不工作时段内的美观性的同时,保证了油烟机的拢烟和吸烟效果。
示例性地,测距装置设置在集烟组件的底部。
这样方便将测距装置隐藏在用户的视线之外,可以提高油烟机的整体视觉效果。此外,还可以方便准确获取下方的距离信息,避免受其他因素的干扰。
示例性地,测距装置是超声测距装置。
由于超声测距装置性能稳定,测量距离精确,盲区小。保证了控制器所得距离信息的准确性,进而可以保证控制器对集烟组件的精准控制效果。
根据本申请另一方面,还提供一种油烟机控制方法,包括:控制油烟机的测距装置在油烟机的机箱组件上周期性地沿左右方向移动;在测距装置的移动过程中,利用测距装置检测下方距离并生成测距信号;根据测距装置在前一预设时间段内的移动过程中生成的测距信号中的最小距离信息,控制油烟机的集烟组件升降,其中测距信号中包括距离信息。
根据上述油烟机控制方法,可以根据测距装置的实时移动测距,实现对集烟组件的实时升降控制。并且,由于工作中的测距装置可以在移动过程中实时获取其下方的多个位置的距离信息,因此可以实现对其下方的烹饪器具的状态的精确检测,由此可以实现对集烟组件的精准升降控制。进而可以在保证用户烹饪操作的方便性的前提下,大大提高油烟机吸油烟的效率,进而显著提高用户体验。
示例性地,根据测距装置在前一预设时间段内的移动过程中生成的测距信号中的最小距离信息,控制油烟机的集烟组件升降,包括:根据测距装置在第i个预设时间段内的移动过程中生成的测距信号,确定测距信号中的最小距离信息h
根据上述方案,可以通过测距装置在油烟机启动后,每隔一个预设时间段读取测距装置检测到的该时段的测距信号,并据此确定该时段的最小距离信息,并可以至少根据每个时段检测到的最小距离信息与上一时段检测到的最小距离信息的差值,控制油烟机的集烟组件的升降。该方案简单、且获取的最小距离信息可以准确表示油烟机下方的烹饪器具的最大高度,由此可以实现对油烟机的集烟组件的实时、精准控制。
示例性地,至少根据最小距离信息hi与最小距离信息h
根据上述方案,可以通过测距装置在当前时段的移动中检测到的最小距离与上一时段检测到的最小距离的差值,来确定集烟组件的升降时间,进而实现对集烟组件的升降控制。这种控制方法简单、准确,消耗的计算量也较低。
示例性地,至少基于差值,确定集烟组件升降的时间,包括:基于如下公式确定集烟组件升降的时间T:T=|h
该计算方法简单、准确,计算量较低,有助于提高对集烟组件的控制效率。
示例性地,至少根据最小距离信息h
上述技术方案中,可以允许集烟组件复位,从而避免了油烟机的无谓工作,避免了集烟组件在不工作时受到环境粉尘污染。在集烟组件复位后,通过上述方案其能顺利下降至理想的工作状态,保证了油烟机的工作效果。
示例性地,在至少根据最小距离信息h
根据上述方案,可以根据测距装置在前一预设时间段内的移动过程中生成的测距信号中的最小距离信息,确定炉头上的烹饪器具是否被移走,并在确定其被移走时,控制集烟组件复位。这样,可以在保证油烟机的工作效果的前提下,避免集烟组件沾染环境中的粉尘,减少用户清洗集烟组件的时间和精力。
示例性地,方法还包括:当油烟机关机时,控制集烟组件复位。
上述方案,可以在油烟机关机时,控制油烟机的集烟组件复位。该方案简单且易于实现,同时可以保证油烟机的良好工作状态的前提下,避免集烟组件沾染环境中的粉尘,减少用户清洗集烟组件的时间和精力。
示例性地,测距装置包括左测距装置和右测距装置,左测距装置在对应于左炉头的、机箱组件的左侧范围内可左右移动,右测距装置在对应于右炉头的、机箱组件的右侧范围内可左右移动,根据测距装置在油烟机启动后的第i个预设时间段内的移动过程中生成的测距信号,确定测距信号所包括的最小距离信息h
根据上述方案,可以通过比对两个测距装置在每个预设时间段中所生成的测距信号中的最小距离信息,确定每个预设时间段的最小距离信息。该方案简单、易于实施,并且还可以提高测距信号的获取效率,从而可以实现对集烟组件的实时与高效控制。
在发明内容中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本申请内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
以下结合附图,详细说明本申请的优点和特征。
附图说明
本申请的下列附图在此作为本申请的一部分用于理解本申请。附图中示出了本申请的实施方式及其描述,用来解释本申请的原理。在附图中,
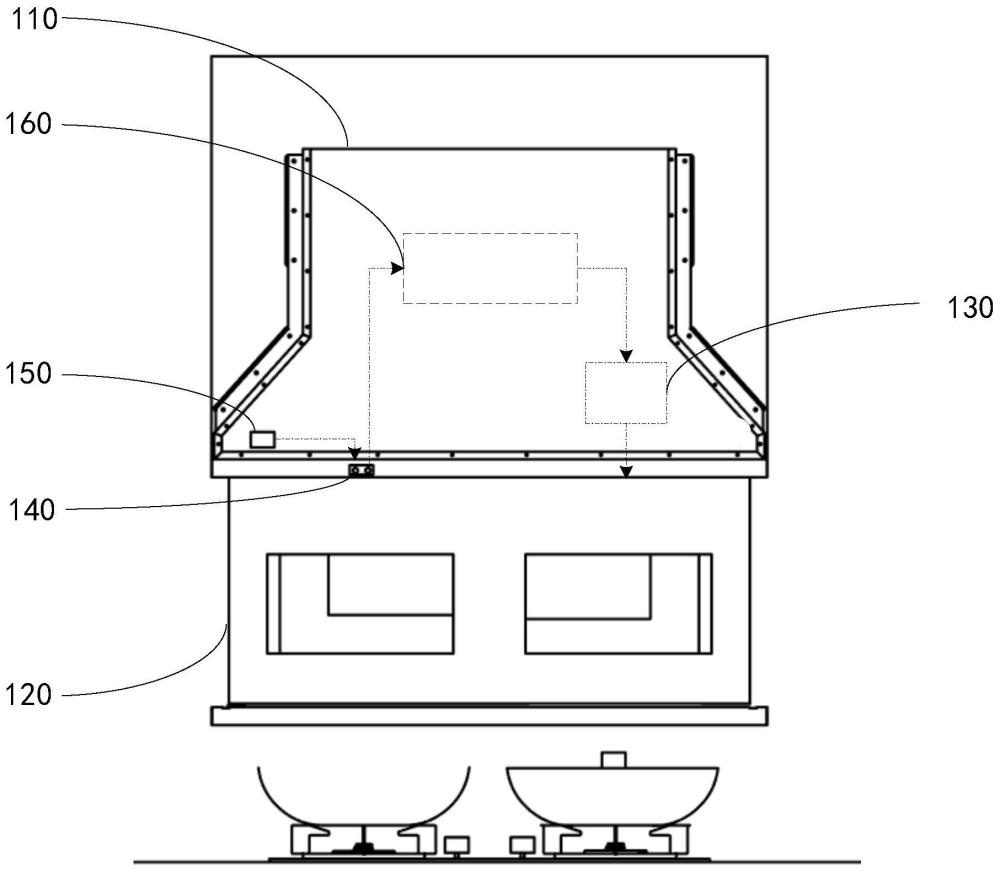
图1示出根据本申请一个实施例的油烟机的示意图;
图2示出根据本申请一个实施例的测距装置检测的距离信息的曲线图;
图3示出根据本申请另一个实施例的油烟机的示意图;
图4示出根据本申请一个实施例的油烟机的侧视图;
图5示出根据本申请实施例的油烟机控制方法的示意性流程图;
图6示出根据本申请实施例的测距装置生成测距信号的示意性流程图;以及
图7示出根据本申请实施例的超声检测装置工作的信号时序图。
其中,上述附图包括以下附图标记:
110、机箱组件;120、集烟组件;130、第一驱动装置;140、测距装置;150、第二驱动装置;160、控制器;141、左测距装置;142、右测距装置。
具体实施方式
在下文的描述中,提供了大量的细节以便能够彻底地理解本申请。然而,本领域技术人员可以了解,如下描述仅示例性地示出了本申请的优选实施例,本申请可以无需一个或多个这样的细节而得以实施。此外,为了避免与本申请发生混淆,对于本领域公知的一些技术特征未进行详细描述。
在实际应用中,油烟机的吸风口距离烹饪器具越近,吸烟效果越佳。如前所述,现有的油烟机中吸风口是固定的,不能根据烹饪器具的高低来进行调整。在诸如当前锅具高度较高的情况下,可能因为吸风口与锅具之间的距离过小,而导致用户烹饪操作不便。在诸如当前锅具高度较低的情况下,吸风口和锅具之间的拢烟区较大,难以避免出现油烟外溢,影响油烟机的吸烟效果。
为了至少部分地解决上述问题,根据本申请实施例的第一方面,提供一种油烟机。图1示出了根据本申请一个实施例的油烟机的示意图。该油烟机可以包括机箱组件110、集烟组件120、第一驱动装置130、测距装置140、第二驱动装置150和控制器160。机箱组件110可以包括机箱壳体和设置在机箱壳体内部的风机(未示出)和集烟管道(未示出)等。集烟管道的顶部可以包括出风口,该出风口可以位于机箱壳体的顶部。机箱壳体可以是长方体等形状。风机可以是现有的或未来研发的任一种风机。风机可以用于产生负压。风机可以通过集烟管道与集烟组件120连通,以将集烟组件120附近的油烟吸入至集烟管道中,并通过出风口排出。风机的数目可以是一个,也可以是多个。在风机的数目是多个的情况下,每个风机可以独立运行,并对应一个集烟管道。集烟管道可以包括硬管也可以包括软管(例如波纹管),不做具体限定。
集烟组件120可升降地连接机箱组件110。机箱组件110和集烟组件120可以通过升降轨道连接。示例性而非限制性地,该升降轨道可以设置在机箱组件110的内部,例如,该升降轨道可以固定设置在机箱组件110的后壁的左右两侧,集烟组件120与机箱组件110之间可以大体呈“抽屉”式的结构。集烟组件120可以在第一驱动装置130的驱动下,沿着该升降轨道在最低下降位置和最高升起位置之间移动。当集烟组件120由第一位置逐渐下降到至第二位置时,其伸出到机箱组件110之外的露出部分可以逐渐变大。并且可以在处于最高上升位置时,集烟组件120的全部或部分位于机箱壳体内。
集烟组件120上可以设置有吸风口。在风机工作的情况下,吸风口附近的油烟可以被吸入吸风口,进而通过集烟管道排出。吸风口的形状可以是任何形状,其数目可以是任何数目,不做具体限定。可选地,吸风口的数目可以是两个,每个吸风口可以对应于位于其下方的炉头。当吸风口的数目是2个的时候,每个吸风口也可以通过集烟管道与对应的风机连接,以实现独立控制风机并吸附其附近的油烟。或者,吸风口的数目为2个,风机的数目为1个,从2个吸风口中吸入的油烟可以通过一个集烟管道吸至风机处,并通过出风口排除。每个吸风口外侧还可以设置有可以自动开合的导风板,以实现独立控制每个吸风口的开合。
集烟组件120的吸风口可以设置在集烟组件120底部的侧面。例如,当集烟组件120位于最高升起位置时,吸风口可以收藏于机箱壳体内。而当集烟组件120下降后,吸风口可以伸出到机箱壳体下之外。且在集烟组件120升起和下降的过程中,集烟组件120的吸风口都可以与集烟管道连通。由此可知,具有该设置的集烟组件120,可以通过调节集烟组件120的位置来调节吸风口的高度,从而可以使吸风口处于更有利于收集油烟的位置。
第一驱动装置130可以连接集烟组件120,用于驱动集烟组件120升降。第一驱动装置130可以是任何合适的驱动装置,只要其可以驱动集烟组件120升降即可。例如,第一驱动装置130包括电机和连接杆。第一驱动装置130可以与集烟组件120之间通过连接杆连接。连接杆可以包括液动推杆或气动推杆等。
测距装置140可以沿左右方向可移动地设置在机箱组件110上且朝向下方,用于检测距离并生成测距信号。测距装置140可以包括任何合适的测距传感器,例如红外热释传感器、超声传感器、雷达传感器等。测距装置140的数目可以是1个,也可以是多个。测距装置140可以设置在机箱组件110的前方,例如可以设置在机箱外壳的前壁外侧。测距装置140也可以设置在机箱组件110的底部。当然,测距装置140也可以设置在其他合适的位置。测距装置140朝向下方,例如测量探头朝向下方,以实现检测位于其下方的、与其探头距离最近的物体的距离信息。
第二驱动装置150可以连接测距装置140,例如可以与测距装置140电连接。第二驱动装置150可以是任何形式的驱动装置,只要其可以实现驱动测距装置140移动即可。示例性而非限制性地,第二驱动装置150可以包括电机。第二驱动装置150可以用于驱动测距装置140周期性地沿左右方向移动。如图1所示,测距装置140可以设置在机箱外壳的前壁外侧的下方的可移动区域。可移动区域可以根据需求任意设置,例如可移动区域可以包括对应炉头整个区域。第二驱动装置150可以用于驱动测距装置140周期性地沿该可移动区域左右移动。例如,第二驱动装置150可以驱动测距装置140在可移动区域的左侧至可移动区域的右侧之间做往复运动。
控制器160可以分别与测距装置140和第一驱动装置130数据连接。一方面可以用于获取测距装置140在移动过程中产生的测距信号,进而可以获取测距装置140在前一预设时间段内的移动过程中生成的测距信号中的最小距离信息。前一预设时间段可以是大于测距装置140一个移动周期的时间。例如,测距装置140移动通过可移动区域一次花费的一个移动周期为1秒,则前一预设时间段可以是前1秒或者前2秒等时间段。
容易理解,测距装置140在移动过程中可以实时检测其下方的距离其最近的物体的信息。在其移动过程中,当其下方包括烹饪器具时,其可以检测到该装置到烹饪器具的最高点的距离信息。在炉头区域的烹饪器具不动的情况下,测距装置140移动到不同的位置时,所检测到的距离信息可以不同。在炉头区域包括不同高度的锅具的情况下,测距装置140移动至不同的位置所检测到的距离信息可以不同。例如,当测距装置140移动至高度较小的炒锅上方时,其检测到的是该测距装置140与炒锅的距离信息。而当测距装置140移动至高度较大的蒸锅上方时,其检测到的是该测距装置140与蒸锅的距离信息。并且,对于同一个烹饪器具,测距装置140在移动过程中还可以有效检测到其是否盖盖的状态。例如,在图2中所示的油烟机在工作时,当测距装置140移动至左炉头上的未盖锅盖的炒锅的边缘的上方时,其检测到的是该测距装置140与其正下方的炒锅边缘的距离d1。在测距装置140移动至未盖盖炒锅的中心的上方时,其检测到的是该测距装置140与炒锅锅底的距离d2。而在测距装置140移动至右炉头上的同样大小的盖盖的炒锅的边缘时,其检测到的是该测距装置140与炒锅边缘的距离d1。在测距装置140移动至盖盖炒锅的中心的上方时,其检测到的是该测距装置140与锅盖手柄顶端的距离d3。
图2示出根据本申请一个实施例的测距装置140检测的距离信息的曲线图。如图所示,测距装置140在可移动区域的一个移动周期内检测到的距离可以随时间变化。控制器160可以根据该移动周期内的测距装置140生成的测距信号获取该移动周期内的最小距离。可以理解,最小距离对应着下方物体的最大高度。由此,控制器160可以根据该周期内的测距信号获取测距装置140与其下方物体的最小距离。例如,可以获取图2中表示锅盖手柄顶端与测距装置140的距离d3。进而可以根据该最小距离,控制第一驱动装置130驱动集烟组件120上升和下降。
控制器160根据测距装置140在前一预设时间段内的移动过程中生成的测距信号确定最小距离之后,可以根据当前确定的最小距离与先前确定的最小距离之间的大小关系,控制集烟组件120上升或下降。上述大小关系可以表示在炉头上方的烹饪器具的状态变化,由此可以实现根据烹饪器具的状态变化控制集烟组件120实时升降。例如可以基于移锅状态、换锅状态、锅盖的开合状态等状态变化,实时控制集烟组件120的升降。示例性而非限制性地,在由较高的烹饪器具换为较矮的烹饪器具时,控制器160可以根据当前确定的最小距离比先前确定的最小距离更大,来控制集烟组件120下降。
控制器160可以通过各种合适的方式控制第一驱动装置130。例如可以通过高电平信号控制第一驱动装置130驱动集烟组件120上升,通过低电平信号控制第一驱动装置130驱动集烟组件120下降。还可以通过控制第一驱动装置130的单次通电时间,以实现控制集烟组件120的单次升降高度。当然,控制器160也可以通过其他合适的形式控制第一驱动装置130驱动集烟组件120上升或下降。
需要说明的是,本申请所使用的方位术语“上”、“下”、“前”、“后”、“左”和“右”都是在该油烟机在使用时相对于用户而言的。
可以理解,固定设置的测距装置难以根据复杂的烹饪情况准确地检测烹饪器具的状态。例如,在锅具未盖盖的情况下,测距装置检测到的高度可能是锅底食材的高度,而并非锅具自身的真实高度。特别是对于锅具自身高度较高的情况,锅底的食材高度可能较低。如果按照锅底食材的高度调整吸风口的高度,可能导致吸风口下降得过低,甚至到达锅具的边缘的高度以下。由此,不仅导致给用户烹饪锅内食材的操作带来不便,而且严重影响了油烟机的吸烟效果。而根据上述方案,该油烟机可以根据测距装置的实时移动测距,实现对集烟组件的实时升降控制。并且,由于工作中的测距装置可以在移动过程中实时获取其下方的多个位置的距离信息,因此可以实现对其下方的烹饪器具的状态的精确检测,由此可以实现对集烟组件的精准升降控制。进而可以在保证用户烹饪操作的方便性的前提下,大大提高油烟机吸油烟的效率,进而显著提高用户体验。
如前所述,集烟组件120上可以设置有吸风口,例如左吸风口和右吸风口。示例性地,吸风口上可以设置有可开合的导风板,控制器160还用于根据最小距离信息,控制导风板的开合。
根据本申请的实施例,在每个吸风口的上方还可以包括有导风板。该导风板可以是任何合适的材质,且可以设置为任何合适的形态。导风板的作用是引导进入吸风口的空气流向,使得空气进入到集烟管道内过程更加平顺,可以便于吸风口对油烟的收集。例如,导风板可以从吸风口的下边缘沿着向上的方向向后倾斜。控制器160还可以根据测距装置140所检测的最小距离信息,控制左导风板和右导风板的开合。例如,控制器160可以控制导风板的开合状态,或者还可以控制导风板的开合角度。例如,在炉头的烹饪器具被移走的情况下,控制器160获取到的测距信号所示的最小距离将达到某一阈值,由此可以控制导风板的倾斜角度逐渐减少,直至合上。
因此,该油烟机可以根据测距装置的测距信号,对油烟机的两个导风板进行开合控制。在确保油烟机在不工作时段内的美观性的同时,保证了油烟机的拢烟和吸烟效果。
示例性地,测距装置140的数目可以是两个。图3示出根据本申请另一个实施例的油烟机的示意图。该油烟机的测距装置140可以包括左测距装置141和右测距装置142。左测距装置141可以在对应于左炉头的、机箱组件110的左侧范围内可左右移动,右测距装置142可以在对应于右炉头的、机箱组件110的右侧范围内可左右移动。左测距装置141可以在对应于左炉头的左边缘至右边缘的上方区域(如图3中W1所示区域)左右移动。可以方便实时检测左炉头上方的锅具与左测距装置141的距离。同样地,右测距装置142可以在对应与右炉头的左边缘至右边缘的上方区域(如图3中W2所示区域)左右移动,可以方便实时检测右炉头上方的锅具与右测距装置142的距离。这样,一方面可以快速获取左测距装置141与左炉头上的烹饪器具的距离信息以及右测距装置142与右炉头上的烹饪器具的距离信息,既可以方便控制器160快速获取最小距离,以提高控制器160对集烟组件120的升降控制效率。另一方面,还可以方便根据左右炉头上的烹饪器具的不同状态信息进行不同的控制。示例性而非限制性地,集烟组件120可以设置有左吸风口和右吸风口,且机箱组件110包括连通左吸风口左风机和连通右吸风口的右风机。控制器160还可以根据左测距装置141和右测距装置142检测到的前一预设时间段的不同最小距离,独立控制左风机和右风机的开关。例如,可以在左测距装置141检测到的最小距离小于某一阈值时,控制左风机开启。而在右测距装置142检测到的最小距离大于该阈值时,控制右风机关闭。
根据上述方案,该油烟机可以通过左右设置的两个测距装置同时进行测距。可以提高检测效率,进而可以提高控制器实时对集烟组件的控制效率。并且,还可以为根据两个炉头上的烹饪器具的不同状态对油烟机的其他组件进行灵活控制提供可能,以提高油烟机的可控性和用户体验。
示例性地,左侧范围可以包括对应于左炉头的右边缘向右第一距离的第一位置和/或对应于左炉头的左边缘向左第二距离的第二位置,右侧范围可以包括对应于右炉头的左边缘向左第三距离的第三位置和/或对应于右炉头的右边缘向右第四距离的第四位置。第一距离、第二距离、第三距离和第四距离可以相等,也可以不相等。可选地,第一距离、第二距离、第三距离和第四距离均相等。第一距离、第二距离、第三距离和第四距离可以是任何合适的距离数值,例如可以是5cm至20cm之间的距离数值。容易理解,日常生活中的烹饪器具的形状和大小多种多样,例如锅具的尺寸可能超过炉头的最大范围。为了可以准确检测测距装置140下方的烹饪器具的高度信息,尤其是烹饪器具边缘的高度信息,可以将每个测距装置140的可移动区域设置的较大。
为了简便,下面仅以与左测距装置141对应的左侧范围为例,进行展开说明。该左侧范围可以包括左炉头的左边缘向左第二距离的第二位置。第二距离例如是10cm。例如,该左侧范围可以是机箱组件110上的、与左炉头的中心至左边缘向左10cm的第二位置对应的区域。左测距装置141可以在该区域内移动,进而可以有效获取左炉头上的烹饪器具的锅盖或其左边缘与左测距装置141的距离。或者,左测距装置141的可移动范围也可以是机箱组件110上的、与左炉头的中心至右边缘向右10cm的第一位置对应的区域,以有效获取左炉头上的烹饪器具的锅盖与其右边缘与左测距装置141的距离。
根据上述方案,左测距装置和右测距装置均至少可以在对应于炉头的边缘的区域进行左右移动,以方便有效且准确地获取测距装置与炉头上的烹饪器具的最小距离,进而可以实现对集烟组件的准确控制,提高用户体验。
示例性地,第二驱动装置150包括左驱动装置和右驱动装置,左驱动装置连接到左测距装置141,右驱动装置连接到右测距装置142。控制器160还分别连接左驱动装置和右驱动装置,以分别控制左驱动装置和右驱动装置驱动对应的测距装置140。根据本申请实施例,还可以通过两个驱动装置分别对左测距装置141和右测距装置142进行独立控制。例如,左驱动装置和右驱动装置均包括电机。左测距装置141与左电机电连接,以由左电机驱动;右测距装置142与右电机电连接,以由右电机驱动。具体地,控制器160可以分别与左驱动装置和右驱动装置连接,还可以独立控制每个驱动装置的运转。例如,控制器160可以通过获取左测距装置141的最小距离信息确定左炉头上是否存在烹饪器具,并可以在确定左炉头上不存在烹饪器具的状态下,控制左电机停止运转,以避免左测距装置141的无效移动。
根据上述方案,油烟机的左测距装置和右测距装置还可以通过独立的驱动装置进行控制。这样避免测距装置的无效移动,从而可以减小能源消耗并提高油烟机寿命。此外,控制器可以协调控制第一驱动装置和第二驱动装置,进而统一调度集烟组件和所有的测距装置。例如,可以在左驱动装置驱动左测距装置由其移动范围的最左端移动到最右端同时右驱动装置驱动右测距装置由其移动范围的最左端移动到最右端之后,根据这段时间内2个测距装置分别生成的测距信号中的最小距离信息,控制第一驱动装置驱动集烟组件升降。由此,控制器能够有效利用2个测距装置所测得的所有测距信号,控制逻辑更简单,不容易发生控制错误。
可以理解,即使测距装置140包括诸如左测距装置141和右测距装置142的多个测距装置140,这些测距装置140均可以利用一个第二驱动装置150来进行驱动,使得这些测距装置140能够同步地同向或者相向移动,由此遍历其移动范围。在此情况下,控制器可以连接或者不连接第二驱动装置。例如,第二驱动装置可以自主地驱动测距装置140移动。
该技术方案中,油烟机的成本较低。
如前所述,控制器160还可以连接第二驱动装置150,用于控制第二驱动装置150驱动测距装置140。示例性而非限制性地,第二驱动装置150可以包括电机。控制器160还可以与该电机电连接,可以通过控制该电机来进一步控制测距装置140。可选地,控制器160可以控制第二驱动装置150的电源的导通与关闭。例如,在上述第二驱动装置150包括左驱动装置和右驱动装置的示例中,控制器160还可以在炉头上的烹饪器具被移走的情况下,如左炉头上的烹饪器具被移走时,控制与该炉头对应的左驱动装置的电源关闭。由此,可以避免测距装置140的无效移动。在另一示例中,控制器160还可以控制调整第二驱动装置150的运转速度。例如,可以在油烟机开启后,控制第二驱动装置150以较大的运转速度运行,以使测距装置140以较快的速度移动,以快速获取最小距离。而在测距信号平稳之后,例如经历几个移动周期之后,则可以通过输出低电平降低第二驱动装置150的运转速度。
根据上述方案,控制器可以协调控制第一驱动装置130和第二驱动装置。由此,控制器的控制逻辑更简单,不容易发生控制错误。
替代地,控制器和第二驱动装置也可以不连接。例如,第二驱动装置可以是上电执行机构。只要油烟机启动,即可给第二驱动装置上电,第二驱动装置即可一直驱动测距装置周期性地沿左右方向移动。
该技术方案中,测距装置的驱动方案简单易实现。
示例性地,测距装置140在对应于两个炉头的中心范围内可左右移动,中心范围的最左侧对应于左炉头的中心位置,中心范围的最右侧对应于右炉头的中心位置。
根据本申请实施例的油烟机可以仅包括一个测距装置140。由于烹饪器具通常都是对称的,因此,可以通过该测距装置140检测烹饪器具的一半区域的高度信息。相应的,测距装置140的可移动区域可以是对应于两个炉头的中心范围的中心区域。该中心范围可以是对应于左炉头中心位置的位置至对应于右炉头中心位置的位置之间的范围。由此,在该测距装置140的移动过程中,可以获取位于左炉头上的烹饪器具的右半侧的顶部与测距装置140的距离以及位于右炉头上的烹饪器具左半侧的顶部与测距装置140的距离。这样可以提高测距装置的检测效率,同时可以减少控制器160的计算量。控制器160可以基于测距装置140检测到的至少一个移动周期内的最小距离,确定两个炉头上的烹饪器具的最高点与测距装置140的距离,从而对集烟组件120进行升降控制。
根据上述方案,可以通过一个测距装置,仅在对应于两个炉头的中心范围内左右移动来获取最小距离信息。既可以提高测距装置的检测效率,又可以减少控制器的计算量。
示例性地,测距装置140的移动轨迹的水平投影与炉头的横向中心轴线的水平投影重合。
图4示出根据本申请一个实施例的油烟机的侧视图。如图4所示,测距装置140(图中的斜线填充区域所示)的移动轨迹的水平投影可以与炉头的横向中心轴线的水平投影重合(图中虚线所示)。即测距装置140可以设置在炉头(图中的圆形区域)的横向中心轴线的正上方。示例性而非限制性地,测距装置140可以从左炉头的中心位置点的正上方移动至与右炉头的中心位置点的正上方。通常情况下,锅盖中心的高度对应烹饪器具的最大高度,例如锅盖手柄通常设置在其中心位置。这样在锅盖表面的高度不同的情况下,可以方便且准确地获取到锅盖中心顶端与测距装置140的距离,从而可以准确得到烹饪器具的最高点与测距装置140的距离。
根据上述方案,测距装置的移动轨迹的水平投影可以与炉头的横向中心轴线的水平投影重合。这样可以有效且准确获取烹饪器具的最高点与测距装置140的距离,从而便可以将集烟组件升降至最合适的高度,进而可以在方便用户烹饪操作的前提下,实现油烟机的高效使用。
示例性地,测距装置140可以设置在集烟组件120的底部。这样方便将测距装置隐藏在用户的视线之外,可以提高油烟机的整体视觉效果。此外,还可以方便准确获取下方的距离信息,避免受其他因素的干扰。
示例性地,测距装置140是超声测距装置140。超声测距装置140可以产生超声波。由于超声波在空气中的传播速度是已知的,因此可以根据超声波发射的时间和在发射后遇到障碍物反射回来被接收的时间之差计算超声测距装置到前方物体的实际距离。在本申请的实施例中,前方物体为烹饪器具或灶具的炉头。
由于超声测距装置性能稳定,测量距离精确,盲区小。保证了控制器所得距离信息的准确性,进而可以保证控制器对集烟组件的精准控制效果。
根据本申请的又一方面,提供了一种油烟机控制方法。图5示出了根据本申请实施例的油烟机控制方法的示意性流程图。如图5所示,油烟机控制方法500包括以下步骤:
步骤S520,控制油烟机的测距装置140在油烟机的机箱组件110上周期性地沿左右方向移动。
步骤S540,在测距装置140移动过程中,利用测距装置140检测下方距离并生成测距信号。如前所述,测距装置140可以朝向下方设置,由此,其能够检测其与下方与之最近的物体之间的距离,在此简称为下方距离。在测距装置140的移动过程中,利用其检测下方距离;所以,测距装置140能够测量机箱组件110下方的、左右方向上的多个位置的物体与测距装置140之间的距离。
可以理解,测距装置140可以是现有的或未来研发的各种适用于检测1米以下距离的测距装置,例如超声测距装置140。示例性地,测距装置140可以通过以下步骤S541至步骤S544检测下方距离并生成测距信号。
在步骤S541,自控制器160接收第一频率的触发信号。
控制器160可以向测距装置140发送第一频率的触发信号。第一频率可以是100至200赫兹之间的任意值,该频率范围可以在保证烟机的控制精度的同时,减少控制器160的计算量。以100赫兹为例,测距装置140每隔10毫秒自控制器160接收触发信号。触发信号可以是脉冲宽度为例如10微秒或者更大的方波信号。
图6示出了根据本申请实施例的测距装置140生成测距信号的示意性流程图。如图6左边示出了定时子程序的示意性流程图,该定时子程序可以一直保持运行。在控制器160开始工作时,其可以初始化标志位flag=0。在定时子程序中,首先初始化定时标志位flag_10ms=0同时开始循环计时操作。在循环计时操作所计时间为10毫秒时,将flag_10ms置为1。当flag_10ms=1时,控制器160根据测距信号确定测距装置140所测距离,参见图6右边流程图所示;再次将flag_10ms置为0并且在flag=0的情况下发送触发信号,例如10微秒的高电平,给测距装置140,同时将flag置为1。由此,测距装置140将接收到例如100赫兹的触发信号。
步骤S542,在触发信号的触发下发送检测信号。
当测距装置140接收到触发信号,可以在触发信号的触发下生成并发送检测信号。下面以测距装置140是超声测距装置140为例进行说明。图7示出了根据本申请实施例的超声测距装置140工作的信号时序图。如图7所示,当超声测距装置140接收到脉宽为10微秒的高电平脉冲信号(即触发信号)时,超声检测装置内部可以生成包括8个高电平脉冲的频率为40千赫兹的周期电平信号,并将其发射出去。这个周期电平信号即为检测信号。
步骤S543,接收检测信号遇到有效测距内的物体而生成的回响信号。
在检测信号被发射出去后,其一旦在超声测距装置140的有效测距内遇到物体,可以立即生成回响信号并反射回超声测距装置140。有效测距可以根据用户需要进行合理设置,例如可以是1米等数值。
步骤S544,根据检测信号和回响信号生成测距信号。其中测距信号脉冲宽度与物体和测距装置140之间的距离成正比。在该示例中,检测信号和回响信号可以分别表示如上所述的超声测距装置140发射的超声波和遇到障碍物反射回的超声波。超声测距装置140可以根据检测信号和回响信号生成测距信号。其中测距信号的脉冲宽度可以表示超声测距装置140发射和接收超声波的时间之差。可以理解,当脉冲宽度越宽时时间之差越大,这表示超声波反射回来所需时间越久,即物体与测距装置140之间距离越远。根据脉冲宽度可以计算出的所测距离。
由此,所测的物体与测距装置之间的距离仅与检测信号和回响信号有关,而不受环境亮度、灯光照射等因素的影响。保证了所测距离的准确性,使得对灶具火力的控制更稳定,误差更小。
步骤S560,根据测距装置140在前一预设时间段内的移动过程中生成的测距信号中的最小距离信息,控制油烟机的集烟组件120升降,其中,测距信号中包括距离信息。
示例性地,该步骤可以通过控制器160实现。控制器160可以根据测距信号确定其中包括的距离信息。进而可以根据不同时刻生成的测距信号中的最小距离信息,控制油烟机的集烟组件120升降。
示例性地,控制器160根据测距信号确定其中包括的距离信息可以包括执行以下操作。
当首次检测到测距信号的高电平时,启动计数器。计数器所计数目以第二频率递增,即每隔固定时间所计数目加1。当检测到高电平后首次检测到测距信号的低电平时,终止计数器。根据计数器所计数目计算距离。为了便于理解,再次参照图6对其进行说明。图6右边示出了根据本申请实施例的外部中断子程序的示意性流程图,该外部中断子程序用于控制器160根据测距信号确定距离。定时子程序可以以固定频率启动外部中断子程序,例如每隔10毫秒。如前所述,每隔10毫秒,在flag=0的情况下,可以将flag置为1,由此可以启动外部中断子程序,开始根据测距信号确定距离。可以理解,测距信号的高电平的时长表示测距信号与前方物体之间的距离,上升沿是高电平的开始,下降沿是高电平的结束。该实施例中,通过计数器的计数操作来确定测距装置140与前方物体之间的距离。计数操作是指对控制器160所接收的测距信号保持高电平的时间以第二频率进行计数的操作。如图6的外部中断子程序所示,外部中断子程序启动后,首先判断当前的flag值。如果flag=1且首次检测到测距信号的高电平则启动计数器。首次检测到测距信号的高电平,即测距信号在当前时刻存在一个上升沿。此时,将计数器所计数目n置为1并将flag置为2。然后,再次转外部中断子程序的开始步骤,重新判断当前的flag值。此时flag=2,接着判断是否检测到测距信号的高电平。如果测距信号仍然是高电平,则重新判断当前的flag值。重复上述循环,直到检测到测距信号为低电平,则这是检测到高电平后首次检测到低电平,测距信号在当前时刻存在一个下降沿。至此,测距信号的高电平结束。可以终止计数器,并将flag重新置0,以为下一次启动外部中断子程序做准备。同时,因为计数操作是以固定的第二频率进行的,所以可以根据所计数目n确定高电平的时长。至此,外部中断子程序执行结束,退出。
通过计数器这一简单的逻辑电路可以实现对测距信号中高电平持续时间的计算。计数器不仅结构简单,成本较低,而且所计数目较为准确。保证了所得距离的准确性。
示例性地,可以根据公式d=(n-1)*340/2f计算距离。其中d表示距离,n表示所计数目,f表示第二频率,340m/s是声波在空气中的传播速度。第二频率例如是8000赫兹。根据前文所述,在检测到测距信号的上升沿时启动计数器,因此将所计数目减去1的差除以第二频率f可以表示高电平持续的时间。将时间乘以速度可以得出信号的往返距离。因此将前述所得距离除以2得到最终的距离d。
通过上述方法确定测距信号中的距离信息,计算量小,并且计算结果准确。由此,可以有效保证对油烟机的准确控制。
本领域普通技术人员通过阅读上文关于油烟机的详细描述,能够理解上述油烟机控制方法中的具体步骤以及其技术效果,为了简洁在此不再赘述。
示例性地,步骤S560,根据测距装置140在前一预设时间段内的移动过程中生成的测距信号中的最小距离信息,控制油烟机的集烟组件120升降,可以包括步骤S562和步骤S564。
在步骤S562,可以根据测距装置140在油烟机启动后的第i个预设时间段内的移动过程中生成的测距信号,确定其中的最小距离信息h
容易理解,最小距离信息可以是测距装置140所检测到的、测距装置140与烹饪器具的最高点的距离信息。
在步骤S564,可以至少根据最小距离信息h
为了简便,在此将预设时间段称为时段,例如h
上述方案中,i也可以等于1。在这种情况下,示例性地,第0个预设时间段的最小距离信息可以是测距装置140在上次油烟机开机的最后一个预设时间段的移动过程中生成的测距信号中的最小距离信息。
根据上述方案,可以通过测距装置在油烟机启动后,每隔一个预设时间段读取测距装置检测到的该时段的测距信号,并据此确定该时段的最小距离信息,并可以至少根据每个时段检测到的最小距离信息与上一时段检测到的最小距离信息的差值,控制油烟机的集烟组件的升降。该方案简单、且获取的最小距离信息可以准确表示油烟机下方的烹饪器具的最大高度,由此可以实现对油烟机的集烟组件的实时、精准控制。
示例性地,步骤S564,根据最小距离信息h
在步骤S564.1,可以确定最小距离信息h
在步骤S564.2,可以至少基于差值,确定集烟组件120升降的时间。容易理解,该差值可以是0,也可以不为0。根据差值是否为0,可以确定测距装置140下方的炉头上的烹饪器具的状态是否发生变化。在该差值不为0时,测距装置140下方的炉头上的烹饪器具的状态发生变化。或者考虑到检测误差,可以在该差值的绝对值达到第一绝对值阈值时,确定测距装置140下方的炉头上的烹饪器具的状态发生变化。该第一绝对值阈值可以是0.5等接近0的数值。在该差值不为0或该差值的绝对值大于第一绝对值阈值时,可以进一步根据该差值,确定集烟组件120的预期升降高度。由于差值可以真实反应炉头上的烹饪器具的最高点的变化值,因此可以根据该差值确定集烟组件120的预期升降高度,可以直接将该差值作为预期的升降高度,也可以将该差值按照预设的转换规则进行转换,得到预期的升降高度。同时,集烟组件120可以保持固定的速度上升或下降,还可以通过控制集烟组件120的升降时间来使油烟机达到预期升降高度。可以根据得到的预期升降高度与集烟组件120的固定升降速度,计算得到升降时间。容易理解,该升降时间可以是集烟组件120在当前时间段的单次升降时间。
在步骤S564.3,基于所确定的时间,控制集烟组件120升降。在确定了当前时间段,集烟组件120的升降时间之后,还可以通过控制该集烟组件120的驱动装置开控制集烟组件120的升降。例如,可以通过控制其驱动装置的通电时间来控制集烟组件120的升降,该通电时间可以等于确定的升降时间。本领域普通技术人员容易理解该方案的多种实现方式,在此不再赘述。
根据上述方案,可以通过测距装置在当前时段的移动中检测到的最小距离与上一时段检测到的最小距离的差值,来确定集烟组件的升降时间,进而实现对集烟组件的升降控制。这种控制方法简单、准确,消耗的计算量也较低。
示例性地,步骤S564.2,至少基于差值,确定集烟组件120升降的时间,包括:基于如下公式确定集烟组件120升降的时间T:
T=|h
该计算方法简单、准确,计算量较低,有助于提高对集烟组件120的控制效率。
示例性地,在步骤S564,至少根据最小距离信息h
可以理解,在一些情况下,油烟机的集烟组件120可能因为各种原因复位,即返回至最高升起位置。例如,当油烟机被关机时,集烟组件120可以返回到机箱组件110内,此时,油烟机无法执行吸烟操作。在集烟组件120复位的情况下,理想情况下,最小距离信息是第一预设距离。考虑到测距装置140的测量误差,最小距离信息也可能略大于第一预设距离。在此基础上,如果当前检测到的最小距离信息h
上述技术方案中,可以允许集烟组件复位,从而避免了油烟机的无谓工作,避免了集烟组件在不工作时受到环境粉尘污染。在集烟组件复位后,通过上述方案其能顺利下降至理想的工作状态,保证了油烟机的工作效果。
示例性地,在步骤S564,至少根据最小距离信息h
在步骤S563.1,可以基于最小距离信息h
根据上述方案,可以根据测距装置在前一预设时间段内的移动过程中生成的测距信号中的最小距离信息,确定炉头上的烹饪器具是否被移走,并在确定其被移走时,控制集烟组件复位。这样,可以在保证油烟机的工作效果的前提下,避免集烟组件沾染环境中的粉尘,减少用户清洗集烟组件的时间和精力。
示例性地,该方法500还包括步骤S570,当油烟机关机时,控制集烟组件120复位。还可以在识别到油烟机关机时,控制集烟组件120回到初始位置。例如,可以控制集烟组件120上升至最高升起位置,例如可以完全或部分收纳至机箱壳体内。
上述方案,可以在油烟机关机时,控制油烟机的集烟组件复位。该方案简单且易于实现,同时可以保证油烟机的良好工作状态的前提下,避免集烟组件沾染环境中的粉尘,减少用户清洗集烟组件的时间和精力。
示例性地,测距装置140包括左测距装置141和右测距装置142,左测距装置141在对应于左炉头的、机箱组件110的左侧范围内可左右移动,右测距装置142在对应于右炉头的、机箱组件110的右侧范围内可左右移动。测距装置140可以包括左右设置的两个测距装置140。每个测距装置140可以对应一个炉头所在的区域。该方案的实现方式如前所述,为了简洁,在此不再赘述。步骤S562,根据测距装置140在油烟机启动后的第i个预设时间段内的移动过程中生成的测距信号,确定其中包括的最小距离信息h
在步骤S562.1,可以实时比较左测距装置141在油烟机启动后的第i个预设时间段内的移动过程中生成的测距信号中的最小距离信息h
根据上述方案,可以通过比对两个测距装置在每个预设时间段中所生成的测距信号中的最小距离信息,确定每个预设时间段的最小距离信息。该方案简单、易于实施,并且还可以提高测距信号的获取效率,从而可以实现对集烟组件的实时与高效控制。
尽管这里已经参考附图描述了示例实施例,应理解上述示例实施例仅仅是示例性的,并且不意图将本申请的范围限制于此。本领域普通技术人员可以在其中进行各种改变和修改,而不偏离本申请的范围和精神。所有这些改变和修改意在被包括在所附权利要求所要求的本申请的范围之内。
在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本申请的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
类似地,应当理解,为了精简本申请并帮助理解各个发明方面中的一个或多个,在对本申请的示例性实施例的描述中,本申请的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该本申请的方法解释成反映如下意图:即所要求保护的本申请要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如相应的权利要求书所反映的那样,其发明点在于可以用少于某个公开的单个实施例的所有特征的特征来解决相应的技术问题。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本申请的单独实施例。
本领域的技术人员可以理解,除了特征之间相互排斥之外,可以采用任何组合对本说明书(包括伴随的权利要求、摘要和附图)中公开的所有特征以及如此公开的任何方法或者设备的所有过程或单元进行组合。除非另外明确陈述,本说明书(包括伴随的权利要求、摘要和附图)中公开的每个特征可以由提供相同、等同或相似目的的替代特征来代替。
此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本申请的范围之内并且形成不同的实施例。例如,在权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。
应该注意的是上述实施例对本申请进行说明而不是对本申请进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的元件或步骤。位于元件之前的单词“一”或“一个”不排除存在多个这样的元件。本申请可以借助于包括有若干不同元件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。
以上所述,仅为本申请的具体实施方式或对具体实施方式的说明,本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。本申请的保护范围应以权利要求的保护范围为准。