一种模块化核动力无人潜航器
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于潜航设备,尤其涉及一种模块化核动力无人潜航器。
背景技术
未来我们将不断面临更复杂的水下工作环境。在复杂的远洋水下工作中,无人潜航器将在海洋环境勘测、海底矿物开采等方面发挥重要作用。目前世界多个国家都在进行对无人潜航器的研究,并用于水下作业,如美国海军装备的“金枪鱼”无人潜航器,俄罗斯的“勇士-D”无人潜航器和中国的HSU001无人潜航器,具有较强的稳定性和灵活性,可下潜到深海区执行各项任务。但是常规能源的无人潜航器存在功能单一,续航时间短等缺点,不足以满足深海探测、长时间航行等需求,这要求我们应该积极寻找新能源替代常规能源作为动力,并且我国也倡导节能减排的理念,所以新能源的应用势在必行。部分国家也开始进行新型动力潜航器的探索,如俄罗斯的“波塞冬”核动力无人潜航器,以核能代替常规能源,续航能力强,航速可超过新式鱼雷、潜艇和水面舰船,且噪声低、机动性高,水下作业具有较大优势。
发明内容
本发明需要解决的技术问题是:常规能源的无人潜航器存在功能单一,续航时间短等缺点,不足以满足深海探测、长时间航行等需求;进而提供一种模块化核动力无人潜航器。
本发明为解决上述技术问题采用的技术方案是:
一种模块化核动力无人潜航器,它包括潜航器本体,以及安装在潜航器本体内的监测系统、远程通讯系统、控制系统、浮潜-冷却系统、热电转换系统、电源系统、屏蔽系统和非能动余热排出换热器;所述的潜航器本体、监测系统、远程通讯系统、浮潜-冷却系统、热电转换系统、电源系统和非能动余热排出换热器分别与控制系统电连接;所述的热电转换系统分别为潜航器本体和浮潜-冷却系统供电,所述的电源系统分别为潜航器本体、监测系统、远程通讯系统和控制系统供电;所述的非能动余热排出换热器套装在热电转换系统热端的外面,所述的屏蔽系统分别设置在热电转换系统的两端。
优选地,所述的潜航器本体包括外壳、两个前翼、三个尾翼、螺旋桨和整流罩;两个所述的前翼分别对称安装在外壳艏部的两端,三个所述的尾翼分别安装在外壳艉部的左右两端和上端,所述的螺旋桨转动安装在外壳艉部的末端,所述的整流罩罩在螺旋桨的外部;
所述的外壳内从艏部至艉部方向依次分隔出艏舱、载重舱、能源舱和推进舱;所述的监测系统、远程通讯系统和控制系统安装在艏舱中;所述的浮潜-冷却系统同时安装在艏舱、载重舱和能源舱中;所述的电源系统分别安装在艏舱和推进舱内;所述的热电转换系统、屏蔽系统和非能动余热排出换热器安装在能源舱中;用于驱动螺旋桨的电机以及用于驱动浮潜-冷却系统5的电机安装在推进舱内。
优选地,所述的浮潜-冷却系统包括第一水箱、第二水箱和第三水箱,第一水箱安装在艏舱中,第二水箱安装在载重舱中,第三水箱安装在能源舱中;所述的第一水箱上和第二水箱上,上、下、左、右的位置处分别连接有一根第三水管,每根第三水管上都设置有一个过滤器和一个阀门;
所述的第一水箱和第二水箱之间通过两根对称设置的第一水管进行连通,每根第一水管上设置一个阀门;所述的第二水箱和第三水箱之间通过若干根第二水管和一根第四水管进行连通,每根第二水管上沿着水流方向依次设置有一个水泵和一个换热器。
优选地,所述的第二水箱中轴向设置有若干根冷水管,冷水管的一端穿过第二水箱的侧壁,并与热电转换系统相连接。
优选地,所述的热电转换系统包括反应堆和若干个温差发电单元,若干个温差发电单元分别设置在第二水箱中的冷水管中;每个反应堆包括若干个以阵列的形式进行排布的反应堆发热单元,所述的反应堆发热单元与温差发电单元一一对应设置。
优选地,每个反应堆发热单元包括一根热管、八根燃料棒和四根慢化棒;所述的四根慢化棒周向均匀布置在热管外的一端,相邻的两根慢化棒之间布置有两根燃料棒,所述热管的另一端插在温差发电单元中;
在阵列的反应堆发热单元的外部设置有四根控制棒、四个插拔驱动器和四个滑移反射层,所述的四个滑移反射层顺次连接形成一个环状结构,并将反应堆发热单元完全包围,相邻的两个滑移反射层之间设置有一根控制棒,所述的控制棒与滑移反射层之间为滑动连接,每根控制棒通过一个插拔驱动器进行驱动,实现移动;来控制反应堆发热单元的功率及启停。
优选地,每个温差发电单元包括一个绝缘导热层、若干个热电材料层和若干个铜片;所述的绝缘导热层包围在热管的外面,若干个热电材料层分内外两层周向布置在绝缘导热层与冷水管之间,内外两层的热电材料层通过铜片进行串联连接。
优选地,所述的电源系统分为两组,其中一组设置在艏舱中,为监测系统、远程通讯系统和控制系统供电;另一组设置在推进舱中,为潜航器的螺旋桨以及副翼的舵机供电。
优选地,所述的屏蔽系统包括两个影屏蔽体,两个所述的影屏蔽体分别布置在热电转换系统的两侧。
优选地,所述的非能动余热排出换热器包括内层壳体和外层壳体,所述的外层壳体套在内层壳体外,且二者之间形成环形空腔,所述外层壳体的上端和下端分别设置有一根进水管和一根出水管,进水管和出水管均与环形空腔相通,且进水管上和出水管上分别设置一个阀门;所述的内层壳体为筒状结构,非能动余热排出换热器套在反应堆的外面。
本发明与现有技术相比产生的有益效果是:
1、本发明将反应堆作为热电转化系统的热源,将浮潜-冷却系统作为热电转化系统的冷端,实现潜航器的热电转化,并为潜航器供电。其中浮潜-冷却系统即可以实现潜航器的浮潜功能以及实现六自由度姿态的改变,又作为热电转化系统的冷端,形成一个集成的系统,大大较小了潜航器的体积;同时,本申请由核动力代替常规电池能源作为动力来源,核能能量密度高,可以大大减少能源所占用的体积,降低维护成本和制造成本,使得潜航器可以完成长达数月的水下工作,大大提高了潜航器的续航能力;反应堆堆芯选择为热管堆,具有体积小,效率高、续航时间长的特点,适宜长时间水下工作。
2、本发明的热电转化系统采用静态的温差发电技术,并由若干个温差发电单元组成,每个温差发电单元对应一个热管设置,有效减少热端热管中热量的覆盖,提高温差发电效率;由于每个温差发电单元的热电材料层由铜片进行串联,铜片的导电性使得每组温差发电单元的小电流能串联成较大的电流,通过导线将相邻的温差发电单元中的铜片相连,使得多层的电流得以串联,获得更大的电流,供工作模块使用。
3、本发明潜航器中前翼和尾翼的设计与飞机的设计模式相同,提高了潜航器的稳定性和平衡能力;在潜航器的尾翼上设计了可以偏摆的副翼,并与浮潜-冷却系统配合,实现了潜航器六自由度姿态的改变;潜航器的艉部增加了整流罩与螺旋桨推进系统,使推力更为集中,使得潜航器更加平稳潜行。
4、本发明中的浮潜-冷却系统采用三个水箱的设计形式,前两个水箱的协同作用,用于潜航器的浮潜与潜航器六自由度姿态的改变,后两个水箱的设计保证了热电转化系统冷端的冷却效果,以获得较高的发电效率。
5、本发明通过备用电池设计,在反应堆发生事故时,可紧急供电保证潜航器的正常航行,增加了潜航器的安全性与可靠性。
6、本发明设计的非能动余热排出换热器,在水管上的阀门开启时,海水基于压差能够自动进入换热器内,并与反应堆进行换热,无需人员操作即可自动将反应堆的余热导出,简化了非能动余热排出系统的结构,节省了宝贵的舱内空间,能够适用于内部空间极为狭小的水下航行器。
附图说明
附图作为本申请的一部分,用来提供对本发明的进一步的理解。
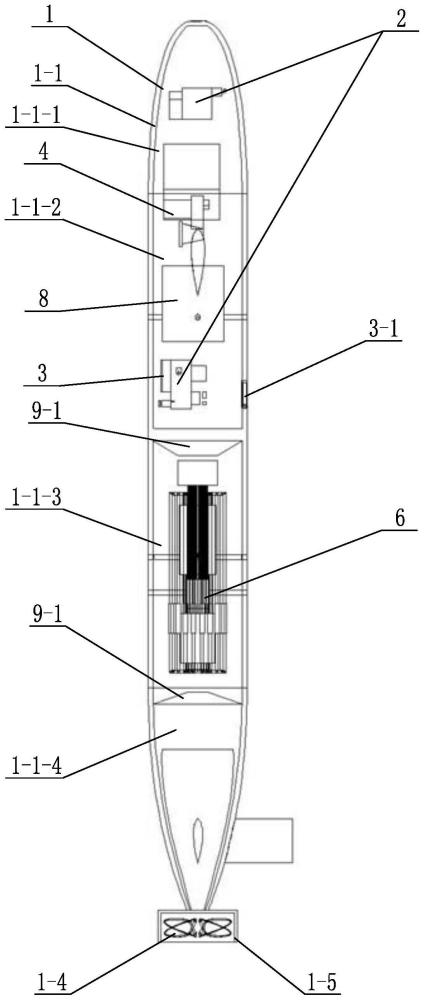
图1为本发明的整体结构示意图。
图2为潜航器本体的俯视图。
图3为潜航器本体的侧视图。
图4为浮潜-冷却系统的结构示意图。
图5为反应堆的结构示意图。
图6为温差发电单元的结构示意图。
图7为非能动余热排出换热器的结构示意图。
图8为监测系统与控制系统连接的结构示意图。
附图标记说明:1-潜航器本体;1-1-外壳;1-1-1-艏舱;1-1-2-载重舱;1-1-3-能源舱;1-1-4-推进舱;1-2-前翼;1-3-尾翼;1-4-螺旋桨;1-5-整流罩;2-监测系统;2-1-温度检测仪;2-2-前视LED及摄像头;2-3-深度计;2-4-多普勒流速仪;2-5-浅地层剖面仪;2-6-侧扫声纳;2-7-电子罗盘;2-8-陀螺仪;2-9-底部LED及摄像头;2-10GPS导航系统;3-远程通讯系统;3-1-天线;4-控制系统;5-浮潜-冷却系统;5-1-第一水箱;5-2-第二水箱;5-3-第三水箱;5-4-第一水管;5-5-阀门;5-6-第二水管;5-7-换热器;5-8-第三水管;5-9-阀门一;5-10-阀门二;5-11-阀门三;5-12-阀门四;5-2-第二水箱;5-8-第三水管;5-13-阀门五;5-14-阀门六;5-15-阀门七;5-16-阀门八;5-17-第四水管;6-热电转换系统;6-1-热管;6-2-燃料棒;6-3-慢化棒;6-4-控制棒;6-5-滑移反射层;6-6-绝缘导热层;6-7-热电材料层;6-8-铜片;8-电源系统;9-屏蔽系统;9-1-影屏蔽体;10-非能动余热排出换热器;10-1-内层壳体;10-2-外层壳体;10-3-环形空腔;10-4-进水管;10-5-出水管。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本发明,但不用来限制本发明的范围。
参见图1,本申请实施例提供一种模块化核动力无人潜航器,其包括潜航器本体1,以及安装在潜航器本体1内的监测系统2、远程通讯系统3、控制系统4、浮潜-冷却系统5、热电转换系统6、电源系统8、屏蔽系统9和非能动余热排出换热器10,所述的潜航器本体1、监测系统2、远程通讯系统3、浮潜-冷却系统5、热电转换系统6、电源系统8和非能动余热排出换热器10分别与控制系统4电连接;所述的热电转换系统6分别为潜航器本体1和浮潜-冷却系统5供电,所述的电源系统8分别为潜航器本体1、监测系统2、远程通讯系统3和控制系统4供电;所述的非能动余热排出换热器10套装在热电转换系统6热端的外面,所述的屏蔽系统9分别设置在热电转换系统6的两端。
所述的监测系统2用于潜航器水下环境的探测、对海底地形进行测绘与拍摄,高效完成海底环境的监测任务;所述的远程通讯系统3用于将潜航器的测量数据及控制信号发送到地面的远程服务器,并接收远程服务器发送的控制指令,将此控制指令发送给控制系统4以控制所述无人潜航器的运行;所述的浮潜-冷却系统5用于潜航器的浮潜和姿态的调整,同时作为热电转换系统6的冷端,实现热电转换系统6的发电功能,为潜航器中的电子设备供电;在热电转换系统6发生故障时,所述的电源系统8部分作为备用电源,为潜航器中的电子设备供电,保证潜航器的正常运行;所述的屏蔽系统9用于屏蔽热电转换系统6发出的核辐射,保证潜航器内电子设备的正常使用;所述的非能动余热排出换热器10用于热电转换系统6中余热的排出。
参见图1,所述的潜航器本体1包括外壳1-1、两个前翼1-2、三个尾翼1-3、螺旋桨1-4和整流罩1-5;两个所述的前翼1-2分别对称安装在外壳1-1艏部的两端,三个所述的尾翼1-3分别安装在外壳1-1艉部的左右两端和上端,两个前翼1-2和三个尾翼1-3能够有效防止潜航器在航行中发生侧翻,所述的螺旋桨1-4转动安装在外壳1-1艉部的末端,用于实现潜航器的航行,所述的整流罩1-5罩在螺旋桨1-4的外部,使螺旋桨1-4的推力更为集中,潜航器更加平稳的潜行。
进一步的,所述的外壳1-1内从艏部至艉部方向依次分隔出四个工作舱,分别为艏舱1-1-1、载重舱1-1-2、能源舱1-1-3和推进舱1-1-4;所述的监测系统2、远程通讯系统3和控制系统4安装在艏舱1-1-1中;所述的浮潜-冷却系统5同时安装在艏舱1-1-1、载重舱1-1-2和能源舱1-1-3中;所述的电源系统8分别安装在艏舱1-1-1和推进舱1-1-4内;所述的热电转换系统6、屏蔽系统9和非能动余热排出换热器10安装在能源舱1-1-3中;用于驱动螺旋桨1-4的电机安装在推进舱1-1-4内。
更进一步的,所述外壳1-1的外形采用myring模型;外壳1-1采用碳纤维高分子复合材料,在外壳1-1上且浮潜-冷却系统5所对应的位置处分别开有开孔,便于浮潜-冷却系统5的抽排水。
进一步的,所述的尾翼1-3包括固定翼和副翼,所述的固定翼固定安装在外壳1-1上,所述的副翼转动安装在外壳1-1上,并处于固定翼的后侧。
参见图1,所述的监测系统2包括温度检测仪2-1、前视LED及摄像头2-2、深度计2-3、多普勒流速仪2-4、浅地层剖面仪2-5、侧扫声纳2-6、电子罗盘2-7、陀螺仪2-8、底部LED及摄像头2-9和GPS导航系统2-10;所述的温度检测仪2-1、前视LED及摄像头2-2、深度计2-3、多普勒流速仪2-4、浅地层剖面仪2-5、侧扫声纳2-6、电子罗盘2-7、陀螺仪2-8、底部LED及摄像头2-9和GPS导航系统2-10分别与控制系统电连接;所述的温度检测仪2-1用于测量潜航器内的温度;所述的前视LED及摄像头2-2和底部LED及摄像头2-9用于拍摄潜航器前方及底下的水下图像;其中摄像头采用OE15-100A型水下照相机,OE15-100A型水下照相机采用钛合金机壳,工作深度3000m,工作电压16-30VDC,功耗约5W,水下电视系统其他设备功耗约30W,整个系统功率约35W;所述的深度计2-3用于测量潜航器下潜的深度;所述的多普勒流速仪2-4采用声学多普勒剖面仪ADCP,用于测量海流剖面、航行速度和水深变化等;所述的浅地层剖面仪2-5用于探测水底以下地质的构造情况;所述的侧扫声纳2-6用于水下搜索和水下考察,来发现水下物体;所述的电子罗盘2-7作为导航仪器或姿态传感器进行使用;所述的陀螺仪2-8用于潜航器偏转角的测量;所述的GPS导航系统2-10用于确定潜航器的位置。
参见图1,所述的控制系统4是以STM32F407VGT6芯片作为核心控制部件,控制板上安装多个控制模块,如陀螺仪模块、稳压电源模块、通信模块、状态可视化模块、PWM控制模块和舵机模块等等,实现信息的接收、处理与发送。
参见图1,所述的远程通讯系统3包括由微型电机控制的天线3-1和远程服务器,用微型电机控制天线的伸出和复位,机械控制天线卧放,在工作时通过电机作用使其竖立,并且通过围壳的天线连接远程服务器以将测量数据发送到远程服务器,并接收远程服务器发送的控制指令。
所述的潜航器外壳1-1上还设置有一个接口,实现电源系统的充电,以及信息的交换,同时能够在水下能源补给接驳站进行能源补充和信息交换。
参见图1,所述的浮潜-冷却系统5包括三个水箱,分别为第一水箱5-1、第二水箱5-2和第三水箱5-3,第一水箱5-1安装在艏舱1-1-1中,第二水箱5-2安装在载重舱1-1-2中,第三水箱5-3安装在能源舱1-1-3中;所述的第一水箱5-1上和第二水箱5-2上、上下左右的位置处分别连接有一根第三水管5-8,每根第三水管5-8上都设置有一个过滤器和一个阀门,其中第一水箱5-1上的上、下、左、右四根第三水管5-8上的阀门分别记为阀门一5-9、阀门二5-10、阀门三5-11和阀门四5-12,第二水箱5-2上的上、下、左、右四根第三水管5-8上的阀门分别记为阀门五5-13、阀门六5-14、阀门七5-15和阀门八5-16;
所述的第一水箱5-1和第二水箱5-2之间通过两根对称设置的第一水管5-4进行连通,即其中一根第一水管5-4的一端连接在第一水箱5-1上,另一端连接在第二水箱5-2,另一根第一水管5-4的一端连接在第一水箱5-1上,另一端连接在第二水箱5-2,每根第一水管5-4上设置一个阀门5-5;所述的第二水箱5-2和第三水箱5-3之间通过若干根第二水管5-6和两根第四水管5-17进行连通,第二水管5-6的一端连接在第二水箱5-2上,第二水管5-6的另一端连接在第三水箱5-3上,第四水管5-17的一端连接在第二水箱5-2上,第四水管5-17的另一端连接在第三水箱5-3上;每根第二水管5-6上沿着水流方向依次设置有一个水泵和一个换热器5-7;第二水箱5-2中的水通过第二水管5-6进入到第三水箱5-3中,第三水箱5-3中的水通过第四水管5-17循环到第二水箱5-2中。
进一步的,所述的第二水箱5-2中轴向设置有若干根冷水管,冷水管的一端穿过第二水箱5-2的侧壁,并与热电转换系统6相连接。
进一步的,所述第二水管5-6的根数为十根,故水泵和换热器5-7的个数也为十个。
进一步的,所述的换热器5-7为螺旋折流板管壳式换热器。
进一步的,所述水泵采用海水循环泵,每组循环泵的扬程为3m,流量为1.5m
本申请的浮潜-冷却系统5即具有控制潜航器的浮潜功能和控制潜航器六自由度的功能,同时还作为热电转换系统6的冷却端,实现热电转换系统6的发电功能;其中,第一水箱5-1只负责潜航器的浮潜控制,第一水箱5-1和第二水箱5-2的协同作用实现潜航器的浮潜和姿态的改变,第二水箱5-2和第三水箱5-3的协同作用,作为热电转换系统6的冷端。
具体功能实现如下:
实现潜航器的浮潜功能:海水经由八根第三水管5-8进入到第一水箱5-1和第二水箱5-2中,潜航器的重力增加,而水下潜航器的体积不变,浮力在此调节过程中几乎不变,重力大于浮力,所以潜航器下沉。第一水箱5-1和第二水箱5-2中的海水经由八根第三水管5-8排出到潜航器外,潜航器的重力减小,浮力几乎不变,重力小于浮力,潜航器上浮,其中第一水箱5-1和第二水箱5-2之间的第一水管5-4上的两个阀门5-5始终处于开启状态,保证潜航器的平衡。
实现潜航器的六自由度运动:
第一水箱5-1和第二水箱5-2之间的第一水管5-4上的两个阀门5-5关闭,使得第一水箱5-1和第二水箱5-2的水切断,且在与艇体外壳的舵翼两个前翼和三个尾翼和推进系统螺旋桨和整流罩相配合,实现潜航器六自由度横荡、纵荡、艏摇、横摇、纵摇、垂荡的运动。
艇体完成横荡动作:第一水箱5-1左右两端的阀门三5-11和阀门四5-12开启,上下两端的阀门一5-9和阀门二5-10关闭;第二水箱5-2左右两端的阀门七5-15和阀门八5-16开启,上下两端的阀门五5-13和阀门六5-14关闭;开启水泵,使得海水由左端或者右端的第三水管5-8进入到第一水箱5-1和第二水箱5-2中,同时再从右端或者左端的第三水管5-8将第一水箱5-1和第二水箱5-2中的海水排出,推动艇体完成横荡动作。
艇体完成纵荡运动:第一水箱5-1和第二水箱5-2上的八个阀门均关闭,通过螺旋桨的推进,艇体向前运动完成纵荡动作。
艇体完成垂荡动作:第一水箱5-1上下两端的阀门一5-9和阀门二5-10开启,左右两端的阀门三5-11和阀门四5-12关闭;第二水箱5-2上下两端的阀门五5-13和阀门六5-14开启,左右两端的阀门七5-15和阀门八5-16关闭;开启水泵,使得海水通过上端或者下端的第三水管5-8进入到第一水箱5-1和第二水箱5-2中,同时通过下端或者上端的第三水管5-8将第一水箱5-1和第二水箱5-2中的海水排出推动艇体完成垂荡动作。
艇体完成横摇动作:左侧尾翼中副翼向下摆动,右侧尾翼中副翼向上摆动,在螺旋桨的协同控制下,完成横摇动作。
艇体完成纵摇动作:通过尾翼与浮潜-冷却系统协同工作,即左侧尾翼中副翼与右侧尾翼中副翼同向摆动,第一水箱5-1上下两端的阀门一5-9和阀门二5-10开启,左右两端的阀门三5-11和阀门四5-12关闭;第二水箱5-2上下两端的阀门五5-13和阀门六5-14开启,左右两端的阀门七5-15和阀门八5-16关闭;开启水泵,使得海水通过第一水箱5-1上端的第三水管5-8进水,第二水箱5-2下端的第三水管5-8进水,同时通过第一水箱5-1下端的第三水管5-8排水,第二水箱5-2上端的第三水管5-8排水,或者通过第一水箱5-1上端的第三水管5-8排水,第二水箱5-2下端的第三水管5-8排水,同时通过第一水箱5-1下端的第三水管5-8进水,第二水箱5-2上端的第三水管5-8进水,推动艇体完成纵摇动作。
艇体完成艏摇动作:尾翼与浮潜-冷却系统协同工作,即处于潜航器上端的尾翼中副翼左摆动或右摆动,第一水箱5-1左右两端的阀门三5-11和阀门四5-12开启,上下两端的阀门一5-9和阀门二5-10关闭;第二水箱5-2左右两端的阀门七5-15和阀门八5-16开启,上下两端的阀门五5-13和阀门六5-14关闭;开启水泵,使得海水通过第一水箱5-1左端的第三水管5-8进水,第二水箱5-2右端的第三水管5-8进水,第一水箱5-1右端的第三水管5-8排水,第二水箱5-2左端的第三水管5-8排水,或者海水通过第一水箱5-1左端的第三水管5-8排水,第二水箱5-2右端的第三水管5-8排水,第一水箱5-1右端的第三水管5-8进水,第二水箱5-2左端的第三水管5-8进水,推动艇体完成艏摇。
实现热电转换系统冷端的低温温度的功能:
本申请将第二水箱5-2中被热电转换系统6加热的水通过第二水管5-6上的换热器5-7进行冷却,并存储到第三水箱5-3中,再通过第四水管5-17循环到第二水箱5-2中,保证热电转换系统6冷端的低温温度。
参见图1,所述的热电转换系统6包括若干个一一对应的反应堆发热单元和温差发电单元;第二水箱5-2中的每根冷水管中布置一个温差发电单元,实现温差发电单元的冷却。
参见图1,每个反应堆发热单元包括一根热管6-1、八根燃料棒6-2和四根慢化棒6-3;所述的四根慢化棒6-3周向均匀布置在热管6-1外的一端,相邻的两根慢化棒6-3之间布置有两根燃料棒6-2,所述热管6-1的另一端插在温差发电单元中,为温差发电单元提供一个较高的温度。
进一步的,若干个反应堆发热单元以阵列的形式进行排布,在阵列的反应堆发热单元的外部设置有四根控制棒6-4、四个插拔驱动器和四个滑移反射层6-5,所述的四个滑移反射层6-5顺次连接形成一个环状结构,并将反应堆发热单元完全包围,相邻的两个滑移反射层6-5之间设置有一根控制棒6-4,所述的控制棒6-4与滑移反射层6-5之间为滑动连接,每根控制棒6-4通过一个插拔驱动器进行驱动,实现移动;来控制反应堆发热单元的功率及启停。
进一步的,所述的热管6-1为两端封闭的铜质管体,传热系数为401W,比热容为0.39kJ/(kg·℃,热管6-1内填充有换热介质,优选为流动的换热液。
进一步的,所述控制棒6-4材料采用氧化铍。
进一步的,所述慢化棒6-3材料采用石墨。
进一步的,所述燃料棒6-2材料采用钼,排布方式采用双排布。
参见图1,每个温差发电单元包括一个绝缘导热层6-6、若干个热电材料层6-7和若干个铜片6-8;所述的绝缘导热层6-6包围在热管6-1的外面,若干个热电材料层6-7分内外两层并错位布置在绝缘导热层6-6与冷水管之间,并通过铜片6-8进行串联连接;即一部分热电材料层6-7周向均匀并间隔布置在绝缘导热层6-6的外圆壁上,另一部分热电材料层6-7周向均匀并间隔布置在冷水管的内壁处,内层的热电材料层6-7与外层的热电材料层6-7错位布置,所述铜片6-8的一端连接在内层的热电材料层6-7上,铜片6-8的另一端连接在外层的热电材料层6-7上,内层的热电材料层6-7与外层的热电材料层6-7通过铜片6-8串联上。
进一步的,所述绝缘导热层6-6采用陶瓷材料。
进一步的,所述的冷水管采用玻璃钢材料,冷水管外侧涂耐高温云母涂层或耐高温树脂涂层,减少高温对材料的影响。
本申请的每个反应堆发热单元中燃料棒6-2中的核燃料发生链式反应,不断产生快中子和热量,产生的快中子与慢化棒6-3撞击变为热中子,从而产生大量的热量,产生的热量通过热管6-1传导至温差发电单元中,温差发电单元采用静态的温差发电技术,热电材料层6-7上下表面的热量与冷量形成温差,由于热电材料本质是P,N型半导体,冷热两端存在温差,激发热电材料中的电子和空穴从高浓度向低浓度运动,形成电势差,产生电流,通过导线将各层热电材料产生小电流串联,形成较大的电流,供工作模块使用,满足潜航器所需要的电能,最终实现热能与电能的转换。
本申请的反应堆发热单元是由步进电机驱动的插拔驱动器牵引控制棒6-4插入堆芯的深度来控制功率的。具体原因为:由于控制棒6-4是由强烈吸收中子的材料制成的,因此其可以有效地控制反应堆的反应速度;当反应堆反应强烈时,插拔驱动器牵引控制棒6-4插入的深一些,控制棒6-4吸收更多燃料棒6-2产生的快中子,链式反应减慢,产生的热量变少;反之,将控制棒6-4从活性区向外拉出一些,控制棒6-4吸收的中子减少,链式反应速度增加,产生的热量更多。因此,本申请通过对控制棒6-4在反应堆发热单元中深度的调节,实现反应堆发热单元功率的调节。
参见图1,所述的电源系统8分为两组,其中一组设置在艏舱1-1-1中,为监测系统2、远程通讯系统3和控制系统4供电,使得反应堆发热单元无轮是否处于正常的工作状态,电源系统8都为监测系统2、远程通讯系统3和控制系统4供电,保证潜航器的正常工作状态;另一组设置在推进舱1-1-4中,为潜航器的螺旋桨以及副翼的舵机供电。
进一步的,所述的电源系统8采用锂亚硫酰氯电池组成电池组,工作电压为3.65V,比能量可达1470W·h·kg-1。
当反应堆发热单元停堆时,热电转换系统6无法继续为潜航器本体1和浮潜-冷却系统5供电,导致潜航器的工作无法进行,热电转换系统6将测量信号传输给控制系统,控制系统控制本申请的电源系统8紧急供电给潜航器本体1和浮潜-冷却系统5,保证潜航器的正常工作。
参见图1,所述的屏蔽系统9包括两个影屏蔽体9-1,两个所述的影屏蔽体9-1分别布置在热电转换系统6的两侧。
进一步的,所述的影屏蔽体9-1采用石墨与碳化硼复合而成的硼碳砖,且在能源舱内部会采用屏蔽体结构并涂抹碳化硼图层以减少对外辐射。
参见图1,所述的非能动余热排出换热器10包括内层壳体10-1和外层壳体10-2,所述的外层壳体10-2套在内层壳体10-1外,且二者之间形成环形空腔10-3,所述外层壳体10-2的上端和下端分别设置有一根进水管10-4和一根出水管10-5,进水管10-4上和出水管10-5上分别设置一个阀门。
进一步的,所述的内层壳体10-1为筒状结构,非能动余热排出换热器10套在反应堆的外面。
当反应堆正常运行时,非能动余热排出换热器10上端和下端的阀门处于开启状态,非能动余热排出换热器10正常运行;非能动余热排出换热器10上下两端的电磁阀开启,开启进水口与出水口,通过海水压差作用,海水从进水口中经水管流入环形空腔10-3,与反应堆进行热交换,环形空腔10-3中的海水自身温度升高、密度降低,从而持续往上流动经出水口流出,使得热管内余热排出,从而使得热管中的钠蒸汽冷凝,使其沿管壁回流至堆芯。
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。