一种正三角相控阵螺栓紧固结构健康监测系统及方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及一种正三角相控阵螺栓紧固结构健康监测系统及方法,于工程结构健康监测技术领域。
背景技术
结构健康监测技术是在智能材料结构领域中被提出来的,该技术通过利用集成在结构内部或表面的传感器实现实时获取与结构健康状态相关的信息,从而识别结构中存在的损伤,以让人们尽早发现损伤,降低财产损失,保证结构的安全。尤其是在一些大型重要机械、飞机、潜艇等方面的结构健康监测技术显得尤为重要。
目前,用于结构健康监测的方法多种多样,如,超声导波监测、机电阻抗法、智能涂层法、光纤传感监测法、超声相控阵等方法。其中,相控阵监测法是结构健康监测领域中一个新的发展方向。
相控阵是利用超声相控阵传感器阵列对结构进行扫描的一种技术,可灵活有效的控制声束指向,通过相位控制使Lamb波波束偏转聚焦,提高信噪比,实现对结构状态的监测。相控阵的主要特点是采用按一定规律排列的压电片,各压电片的激励均由上位机控制,能产生聚焦波束实现对工件的扫描,并能实现对检测结果的成像。相控阵技术可以通过软件设定,在不移动探头的情况下,只需改变软件设置就可以快速地改变声束的偏转角度,实现对工件截面的扫查。相控阵探头主要有线形(线阵列)、面形(二维矩形阵列)和环形(圆形阵列)。
使用上述几种阵列对螺栓紧固状态进行监测较为浪费,并且由于传感器数量较多会极大降低系统的检测效率,因此,非常有必要设计一种新型的结构健康监测装置,能够降低成本并简化传统相控阵在结构健康监测中要进行时间延迟的步骤,在提高系统检测效率的同时,又有效提高结构健康监测系统的检测准确性。
发明内容
本发明要解决的技术问题是提供一种正三角相控阵螺栓紧固结构健康监测系统及方法,采用正三角形相控阵的方法对单颗螺栓或其他微小且重要单元进行结构健康监测,能够准确、快速并利用最少压电片来识别微小损伤,解决上述问题。
本发明的技术方案是:一种正三角相控阵螺栓紧固结构健康监测系统,包括上位机、信号发生器、功率放大器、正三角相控阵传感网络、电荷放大器、信号采集卡。
正三角相控阵传感网络包括三组压电传感器阵列,三组压电传感器阵列构成正三角形并分别位于正三角形三个顶点上,三组线性阵列传感器中,每组阵列由N个完全相同的传感器阵列单元组成,根据实际检测需要来减少或增加阵列单元的数量,每个阵列单元均为圆形的压电传感器。三组线性阵列传感器分别依次作为激励器,剩余两个阵列作为接收器。即,当一组传感器阵列作为激励器向被测结构中激发Lamb波信号时,另外两组传感器阵列作为接收器接收来自激励器传感器并经过损伤和螺栓反射的Lamb波响应信号,以此类推,另外两组传感器再分别作为激励器,剩余两组阵列作为接收器获得相应的响应信号。
上位机通过USB数据线与信号发生器的USB HOST&Device接口连接,信号发生器的输出端口接功率放大器的输入端口,功率放大器的USB Device接口通过低噪音电缆线连接正三角形三个顶点处的三组压电传感阵列,三组压电传感阵列通过低噪音电缆线与电荷放大器的L5接口相连,电荷放大器的BNC接口通过输出电缆线与信号采集器卡的OPEN5接口相连,信号采集器卡的USB接口通过USB电缆线和上位机的USB接口相连。从而将上位机、信号发生器、功率放大器、压电传感网络、信号采集器卡连接组成完整的结构健康监测系统。
正三角相控阵螺栓紧固结构健康监测系统的使用方法,具体步骤为:
Step1:将正三角相控阵传感网络中的三组压电传感器阵列记为A、B、C三点,在上位机中设置激励信号参数,并将其发送至信号发生器,信号发生器根据接收到的激励信号参数产生相应的Lamb波,并经功率放大器放大后分别依次加载到正三角相控阵传感网络的A、B、C三组线性阵列传感器中的激励传感器阵列单元,激励传感器阵列单元产生的Lamb波信号对被监测结构进行相控扫描,得到包含损伤信息的Lamb波信号,该信号被剩余两组接收器接收。
Step2:包含损伤信息的Lamb波信号传输至电荷放大器放大,信号采集器卡采集放大后的有效信号并将其换成数字信号传输至上位机并存储于上位机中。
Step3:上位机通过差分法、窗函数、正三角形相控阵,正三角形时间反转聚焦等方法对所采集到的信号进行成像、计算、对比,得到被监测对象的健康状况。
所述Step1中的正三角相控阵传感网络具体为:
Step1.1:以被监测的螺栓为等边三角形的中心,在边长为l的等边三角形的三个顶点分别布置线性压电阵列,三个顶点依次编号为A、B、C,每一个顶点处的压电阵列由N个压电片组成,N个压电片依次编号为A
Step1.2:对A、B、C三个顶点的压电传感器依次施加窄带Lamb波信号,其中一个顶点作为激励器,另外两个顶点作为接收器,形成激励-传感通道,一共获得3*(3-1)=6个激励-传感通道的响应信号。
所述Step1中的正三角相控阵传感网络中的相控阵具体为:
Step1.3:在一个扫描周期T中,正三角形A、B、C三点激励信号的初始位置均指向中心点处的被监测的螺栓,此时A、B、C三点的相位分别为30°,150°,270°,在此方向上发射-接收Lamb信号的时间为t。在t+时刻激励信号相位均处于A、B、C三点的初始相位方向,A、B、C三点初始相位分别为0°,120°,210°,并以逆时针方向为正方向旋转扫描。在t+至T/2时刻,A、B、C三点处的阵列从初始相位按逆时针方向开始对三角形区域进行扫描,扫描角度为60°,即A、B、C三点分别扫描到60°、180°、270°时,1/2个扫描周期结束。在T/2+时刻,A、B、C三点相位回到0+时刻的相位,即0°、120°、210°,指向三角形中心螺栓,再经过时间t,A、B、C三点回到相位60°、180°、270°处,并按顺时针方向开始扫描三角形区域,扫描角度为60°,完成一个周期的扫描。
Step1.4:在螺栓连接状态完好且正三角形区域结构健康状态下,重复Step1.3,并保存记录相应的响应信号,标注为基准信号。
Step1.5:在螺栓松动,但正三角形区域结构健康状态下,重复Step1.3,并保存记录相应的响应信号。
Step1.6:在正三角形区域有结构损伤,螺栓连接完好状态下,重复Step1.3,并保存记录相应的响应信号。
Step1.7:在螺栓松动且三角形区域结构损伤状态下,重复Step1.3,并保存记录相应的响应信号。
Step1.8:将Step1.4中所得信号作为基准信号,根据差分法,用Step1.5、Step1.6所得的响应信号分别减去基本信号,得到不同情况下的损伤散射信号,并保存记录相应的信号。
Step1.9:通过比较Step1.4和Step1.5在(0,t)的周期内和(T/2,T/2+t)的周期内的信号图(幅值和相位),并根据实际情况设置两个信号差阈值,若两者信号差超过所设定的阈值,则判定为螺栓松动,人工进行螺栓紧固及安全检查操作,反之,螺栓处于正常状态。
Step1.10在Step1.6的情况下,当正三角形相控阵在所控制区域检测到损伤时,Lamb波会在损伤处聚焦,根据时间反转聚焦原理,当传感器接收到由损伤点反射的响应信号后对其进行时间反转,并将该信号施加到相应的传感器上作为激励信号再次在结构中激发,可以在真实损伤点处产生聚焦,而在非真实损伤点处不能产生聚焦。设激励信号从A、B、C三顶点到达损伤的最大时刻为t
Step1.11:根据Step1.10测得损伤到A、B、C各点的时间和各方向的波速,即可以得到损伤到A、B、C三点的距离,再根据正三角形的性质,即在等边三角形中,三顶点A、B、C固定,位置已知并且能够获得三角形内同一损伤点到A、B、C三点的距离,故而可求得损伤点在直角坐标系中的具体位置和相位,便可得到损伤的位置和相位。
Step1.12:对比整合Step1.10和Step1.11即可得到损伤的具体位置,由Step1.10可直接通过成像结果获得损伤位置情况,但直接从损伤图像中提取损伤位置信息会存在一定的误差,通过Step9可以准确的校准损伤的具体位置。
Step1.13:对Step1.7所获得的信号利用(0,t)和(T/2,T/2+t)的时间窗函数截取这两段时间内的信号并减去Step1.4中相对应的基准信号,即为此状态下螺栓的损伤散射信号,再用剩下时段的信号减去Step1.4中相对应时段的基准信号,即为Step1.7中正三角形区域的损伤信号,重复Step1.10和Step1.11,可得损伤的具体位置。
所述Step1.10中反转聚焦信号的处理方法为:
Step1.10.1:用S(ω)表示激励信号s(t)的频谱,H
Step1.10.2:根据Lamb波传播特性,传感信号的频率成分与激励信号的频率成分应基本相同,令X
Step1.10.3:根据声波传播的互易性原理,h(t)=h
式(2)、式(3)中,X
如果在传感器上同时加载各自的传感时反信号,则根据声波传播叠加原理在激励器上可以得到的信号频谱为:
式(4)中,H
本发明的有益效果是:
1、本发明每个扫描周期内对正三角形区域完整的扫查两次,对微小损伤的监测更加有效、准确。
2、本发明为螺栓的监测给出特定的时间,并且三个顶点A、B、C的激励可同时到达螺栓,螺栓处的损伤/健康信号也可同时到达三个顶点A、B、C,故能快速,准确的获取螺栓的松紧信号;此步骤仅需控制激励信号相位和发射时间,无需时间延迟,简化操作步骤,缩短周期。
3、本发明主要针对结构独立并且对整体系统影响较大的结构进行监测,能够精准的获得这些敏感区域的健康状况,当损伤出现时及时处理,以避免造成巨大损失。
4、本发明的激励信号使用窄带Lamb波,窄带Lamb波信号是频率较为集中的有限信号,对小损伤敏感,且其传播会随着距离的增加能量会随着减小,故将其限定在较小的正三角形区域内传播能够充分发挥它的优点,有效提高系统的检测精度和准确率。
附图说明
图1是本发明中的系统结构图;
图2是本发明中的系统装置图;
图3、图4分别是本发明中的正三角形相控阵原理图;
图5是本发明中的正三角形相控阵工作周期图;
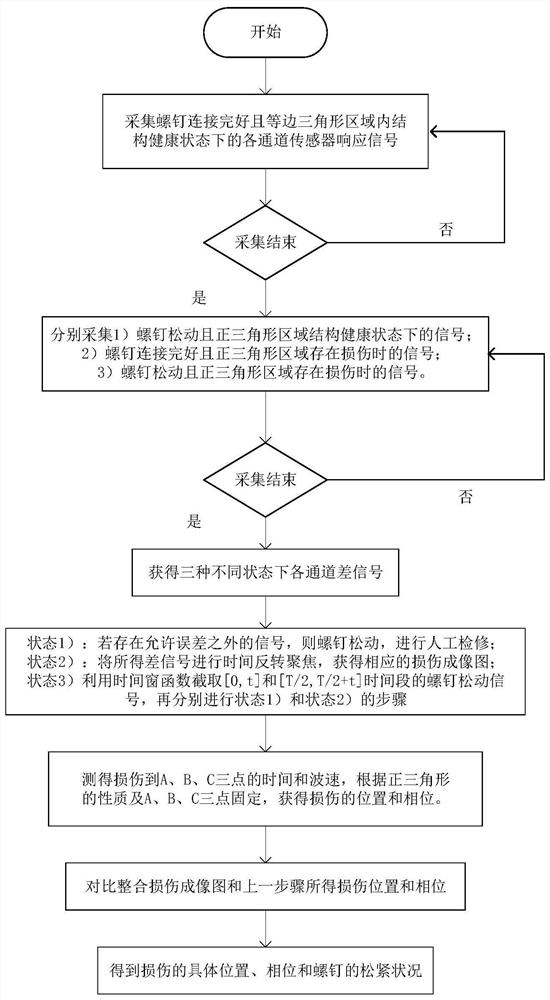
图6是本发明的方法流程图;
图7是本发明的试件结构与传感阵列的结构示意图。
具体实施方式
下面结合附图和具体实施方式,对本发明作进一步说明。
实施例1:如图1-2所示,一种正三角相控阵螺栓紧固结构健康监测系统,包括上位机、信号发生器、功率放大器、正三角相控阵传感网络、电荷放大器、信号采集卡。
所述的信号发生器为北京普源精电科技有限公司的Rigol DG1022信号发生器,采用直接数字频率合成(DDS)技术设计,能够产生精确、稳定、低失真的输出信号,可以产生正弦波、方波、锯齿波、脉冲波等多种基本波形和任意波形。频率范围为100mHz-200MHz。
所述的功率放大器为PA1011。压电传感器是TMDS461。电荷放大器是江苏联能电子技术有限公司得到YE5850A,可以输入电荷信号或电压信号,最大输出电压为±10Vp,最大输出电流为5mA,频带宽为2μHz-100KHz。信号采集器卡为美国国家仪器公司的NI USB-6356,其为8路同步模拟输入,每通道1.25MS/s,16位分辨率,10MS/s AI总吞吐量。
正三角相控阵传感网络包括A、B、C三组压电传感器阵列,A、B、C三组压电传感器阵列构成正三角形并分别位于正三角形三个顶点上,A、B、C三组线性阵列传感器中,每组阵列由N个完全相同的传感器阵列单元组成,每个阵列单元均为圆形的压电传感器。A、B、C三组线性阵列传感器分别依次作为激励器,剩余两个阵列作为接收器。即,当A组传感器阵列作为激励器向被测结构中激发Lamb波信号时,B、C组传感器阵列作为接收器接收来自激励器A并经过损伤和螺栓反射的Lamb波响应信号,以此类推,B、C再分别作为激励器,剩余两组阵列作为接收器获得相应的响应信号。
上位机通过USB数据线与信号发生器的USB HOST&Device接口连接,信号发生器的输出端口接功率放大器的输入端口,通过STYV-1聚乙烯低噪音电缆线连接功率放大器的USB Device接口和正三角形三个顶点上的A、B、C三组压电传感阵列,A、B、C三组压电传感阵列通过STYV-1聚乙烯低噪音电缆线与电荷放大器的L5接口相连,再由SYV-SO-2-2的输出电缆连接电荷放大器的BNC接口与信号采集器卡的OPEN5接口,最后通过USB电缆线连接信号采集器卡的USB接口和上位机的USB接口,从而将上位机、信号发生器、功率放大器、压电传感网络、信号采集器卡连接组成完整的结构健康监测系统。从而将上位机、信号发生器、功率放大器、压电传感网络、信号采集器卡连接组成完整的结构健康监测系统。
如图3-7,所述的正三角相控阵螺栓紧固结构健康监测系统的使用方法,以对碳纤维复合材料机翼盒段上的某单颗螺栓进行紧固状态监测为例,具体步骤为:
Step1:被监测的螺栓周围正三角相控阵传感网络的布置如下:以直径为10mm的待测螺栓为等边三角形的中心,在边长为100mm等边三角形顶点A、B、C布置压电传感阵列。
Step2:对A、B、C三个顶点的压电阵列依次施加Lamb波信号,其中一个顶点作为激励器,另外两个顶点作为传感器,形成激励-传感通道,一共获得3×(3-1)=6条激励-传感通道的相应信号。
Step3:通过上位机编程,使信号发生器激发相位固定且分别为30°、160°、270°,幅值为5V的激励信号。
Step4:采集螺栓连接完好且等边三角形区域内结构健康状态下的各通道传感器相应信号作为基准信号。
Step5:采集螺栓松动且正三角形区域结构健康状态下的信号,
Step6:根据差分法获得此状态下各通道的差信号。
Step7:所得信号减去基准信号得到的差信号在允许的误差之外,电压幅值允许的误差范围为:±0.025%V
实施例2:一种用正三角相控阵的螺栓紧固结构健康监测系统对局部重点区域结构健康监测的方法。
对于某些位置特殊并且较难发现是否存在损伤隐患的局部重点区域需要对其进行实时在线结构健康监测,以能够及时获取是否有损伤存在及损伤所在的具体位置等信息。
如图1所示,一种正三角相控阵的螺栓紧固健康监测系统,由上位机、信号发生器、功率放大器、正三角相控阵传感网络模块、电荷放大器、信号采集卡组成。
所述的信号发生器为北京普源精电科技有限公司的Rigol DG1022信号发生器,采用直接数字频率合成(DDS)技术设计,能够产生精确、稳定、低失真的输出信号,可以产生正弦波、方波、锯齿波、脉冲波等多种基本波形和任意波形。频率范围为100mHz-200MHz。
所述的功率放大器为PA1011。压电传感器是TMDS461。电荷放大器是江苏联能电子技术有限公司得到YE5850A,可以输入电荷信号或电压信号,最大输出电压为±10Vp(DC~30kHz),最大输出电流为5mA,频带宽为2μHz-100KHz。信号采集器卡为美国国家仪器公司的NI USB-6356,其为8路同步模拟输入,每通道1.25MS/s,16位分辨率,10MS/s AI总吞吐量。
所述上位机通过USB数据线与信号发生器的USB HOST&Device接口连接,信号发生器的输出端口接功率放大器的输入端口,通过STYV-1聚乙烯低噪音电缆线连接功率放大器的USB Device接口和正三角形三个顶点上的A、B、C三组压电传感阵列,A、B、C三组压电传感阵列通过STYV-1聚乙烯低噪音电缆线与电荷放大器的L5接口相连,再由SYV-SO-2-2的输出电缆连接电荷放大器的BNC接口与信号采集器卡的OPEN5接口,最后通过USB电缆线连接信号采集器卡的USB接口和上位机的USB接口,从而将上位机、信号发生器、功率放大器、压电传感网络、信号采集器卡连接组成完整的结构健康监测系统。
以检测500mm×500mm×5mm的碳纤维板的损伤定位为例,所述方法的具体步骤如下:
Step1:其正三角相控阵传感网络布置如下:在500mm×500mm×5mm的碳纤维板上布置边长为150mm等边三角形,等边三角形的三个顶点A、B、C分别放置相同型号的TMDS461压电片。
Step2:对A、B、C三个顶点的压电阵列依次施加幅值为5V的Lamb波信号,其中一个顶点作为激励器,另外两个顶点作为传感器,形成激励-传感通道,一共获得3×(3-1)=6条激励-传感通道的相应信号。
Step3:在一个扫描周期T中,通过上位机编程控制各压电片的相位,其中A、B、C三点初始相位分别为0°、120°、210°,在(0,T/2)内,以逆时针方向为正方向,对三角形区域进行扫描,扫描角度为60°,即A、B、C三点分别扫描到60°、180°、270°时,1/2个扫描周期结束。在T/2+时刻,又以顺时针方向扫描三角形区域,扫描角度为60°,完成一个周期的扫描。
Step4:采集等边三角形区域内结构健康状态下的各通道传感器相应信号作为基准信号。
Step5:采集正三角形区域内存在损伤时的信号。
Step6:根据差分法获得此状态下各通道的差信号。
Step7:所得差信号进行时间反转聚焦,获得相应的损伤成像图。
Step8:测得损伤到A、B、C各点的时间和各方向的波速,得到损伤到A、B、C三点的距离,再根据A、B、C三点位置固定,损伤点为同一点,即可得到损伤的位置和相位。
Step9:上位机对比整合由相控阵、时间反转聚焦获得的损伤成像图和Step8所得的损伤位置和相位,可获得损伤的具体位置。
实施例3:一种用正三角相控阵的螺栓紧固结构健康监测系统对螺栓紧固状态及其周围局部重点区域健康监测的方法。
对于飞机、桥梁、设备等安装有螺栓的敏感部位进行螺栓紧固状态及螺栓周围结构健康状态进行实时在线监测具有重要意义,若某些重要部位的螺栓松动,或螺栓周围的结构存在损伤导致螺栓松动都会造成严重的损失。
如图1所示,一种正三角相控阵的螺栓紧固健康监测系统,由上位机、信号发生器、功率放大器、正三角相控阵传感网络模块、电荷放大器、信号采集卡组成。
所述的信号发生器为北京普源精电科技有限公司的Rigol DG1022信号发生器,采用直接数字频率合成(DDS)技术设计,能够产生精确、稳定、低失真的输出信号,可以产生正弦波、方波、锯齿波、脉冲波等多种基本波形和任意波形。频率范围为100mHz-200MHz。
所述的功率放大器为PA1011。压电传感器是TMDS461。电荷放大器是江苏联能电子技术有限公司得到YE5850A,可以输入电荷信号或电压信号,最大输出电压为±10Vp(DC~30kHz),最大输出电流为5mA,频带宽为2μHz-100KHz。信号采集器卡为美国国家仪器公司的NI USB-6356,其为8路同步模拟输入,每通道1.25MS/s,16位分辨率,10MS/s AI总吞吐量。
所述上位机通过USB数据线与信号发生器的USB HOST&Device接口连接,信号发生器的输出端口接功率放大器的输入端口,通过STYV-1聚乙烯低噪音电缆线连接功率放大器的USB Device接口和正三角形三个顶点上的A、B、C三组压电传感阵列,A、B、C三组压电传感阵列通过STYV-1聚乙烯低噪音电缆线与电荷放大器的L5接口相连,再由SYV-SO-2-2的输出电缆连接电荷放大器的BNC接口与信号采集器卡的OPEN5接口,最后通过USB电缆线连接信号采集器卡的USB接口和上位机的USB接口,从而将上位机、信号发生器、功率放大器、压电传感网络、信号采集器卡连接组成完整的结构健康监测系统。
以安装单颗螺栓的铝板为例,所述方法的具体步骤如下:
Step1:螺栓直径为10mm,铝板为300mm×300mm×5mm,螺栓周围正三角相控阵传感网络的布置如下:以直径为10mm的待测螺栓为等边三角形的中心,在边长为180mm等边三角形顶点A、B、C布置压电传感阵列。
Step2:对A、B、C三个顶点的压电阵列依次施加幅值为5V的Lamb波信号,其中一个顶点作为激励器,另外两个顶点作为传感器,形成激励-传感通道,一共获得3×(3-1)=6条激励-传感通道的相应信号。
Step3:在一个扫描周期T中,由上位机编程控制激励的相位,A、B、C三点阵列激发的信号的初始位置均指向中心螺栓,即30°、160°、270°,在此方向上发射---接收Lamb信号的时间为t,在t+时刻激励信号相位均回到A、B、C三点的初始相位方向,A、B、C三点初始相位分别为0°、120°、210°,在(t,T/2)内,以逆时针方向为正方向,对三角形区域进行扫描,扫描角度为60°,即A、B、C三点分别扫描到60°、180°、270°时,1/2个扫描周期结束。在T/2+时刻,A、B、C三点相位回到0+时刻的相位,指向三角形中心螺栓,再经过时间t,A、B、C三点回到相位60°、180°、270°处,并以顺时针方向扫描三角形区域,扫描角度为60°,完成一个周期的扫描。
Step4:采集螺栓连接完好且等边三角形区域内结构健康状态下的各通道传感器相应信号作为基准信号。
Step5:分别采集:1)螺栓松动且正三角形区域结构健康状态下的信号,2)螺栓连接完好且正三角形区域存在损伤时的信号,3)螺栓松动且正三角形区域存在损伤时的信号。
Step6:根据差分法获得此状态下各通道的差信号。
Step7:根据时间反转聚焦原理,设A、B、C三顶点到达损伤的最大时刻为t
Step8:测得损伤到A、B、C各点的时间和各方向的波速,得到损伤到A、B、C三点的距离,再根据A、B、C三点位置固定,损伤点为同一点,即可得到损伤的位置和相位。
Step9:对比整合由相控阵、时间反转聚焦获得的损伤成像图和步骤(8)所得的损伤位置和相位,可获得损伤的具体位置。
以上结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 一种正三角相控阵螺栓紧固结构健康监测系统及方法
- 一种正三角相控阵螺栓紧固结构健康监测系统及方法