一种基于行人手臂角度分析的加油员手势识别的方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及图像技术领域,具体涉及一种基于行人手臂角度分析的加油员手势识别的方法。
背景技术
加油站在建立之初根据安防要求,在加油机区域安装摄像机,通过摄像机监控的方式对加油站的加油员的加油作业情况进行考察。其中加油员在加油过程中是否有标准的手势严重影响加油站在顾客心中的形象,油企在对管辖内加油站站点进行管理时,只有通过抽查的方式来监控各个站点的加油员是否在加油过程中有标准手势。
现有技术完全是采用人为干预的方法,通过摄像头监控加油员是否在加油过程中有标准手势,并没有一种客观的非人工且准确的智能监控加油员是否在加油过程中有标准手势。这种完全依靠人工的方法无法全面的统计所有加油员的行为是否合规,无法对其进行系统性评价,从而不能做到对加油员进行全面的评估和监管,加油站的服务质量和形象宣传管理效果不够可控。
发明内容
为解决现有技术中仅通过人工干预来进行对加油员手势进行监管的问题,本发明提供了一种基于行人手臂角度分析的加油员手势识别的方法。
本发明通过下述技术方案实现:
一种基于行人手臂角度分析的加油员手势识别的方法,包括如下步骤:
S1:监控系统实时采集加油机附近区域的实时视频,每预设时间截取一张图像,得到实时图像集;
S2:使用YOLO V3算法对实时图像集中的行人进行检测,提取图像中的行人,得到行人图像集;
S3:通过图像中行人的手臂角度对行人进行类别定义,0代表手臂角度为0度到60度的行人,1代表手臂角度为61度到100度的行人,2代表手臂角度为101度到180度的行人;
S4:构建卷积神经网络,使用卷积神经网络对所述行人图像集进行训练,得到训练好的卷积神经网络;
S5:利用训练好的卷积神经网络对行人图像集进行判定,若输出为0,则判定行人无姿势;若输出为1,则判定行人保持车辆引导姿势;若输出为2,则判定行人保持指向显示屏姿势。
在上述方案的基础上,进一步地有:步骤S1中的监控系统包括多个摄像机,摄像机的安装位置与对应该摄像机所监控的加油机水平距离为8~12米,距地面高度为3~5米。
在上述方案的基础上,进一步地有:步骤S2中提取图像中的行人的具体方法为:对图像中的行人进行截取,生成仅包含行人的图像。
在上述方案的基础上,进一步地有:步骤S3中图像中行人的手臂角度的计算公式为:
C=arctan((y
其中,取图片中心点作为原点建立坐标系,(x
在上述方案的基础上,进一步地有:步骤S4包括如下子步骤:
S41:选择30000张行人图像集作为训练数据集,3000张行人图像集作为训验证数据集;
S42:定义标准卷积核,卷积核尺寸为3*3*n,参数量为3*3*n;
S43:搭建卷积神经网络,从卷积神经网络的输入端输入256*256*3,从卷积神经网络的输出端输出1*1*3,即时输出数据分别为0、1、2三类数据的概率;
S44:定义损失函数L,损失函数L的计算公式如下:
其中,
S45:通过损失函数,利用梯度下降法对训练集进行训练,优化卷积神经网络;
S46:使用卷积神经网络对验证集进行验证,当验证精度大于95%且不再提升时结束卷积神经网络训练,从而得到训练好的卷积神经网络。
在上述方案的基础上,进一步地有:步骤S41中的训练数据集和验证数据集中,均包含比例为1:1:1的0、1和2三类数据。
本发明与现有技术相比,具有如下的优点和有益效果:
本发明克服了前述的现有技术中存在的油企管理者对油站的加油员的行为监管不到位,对油站的对外形象等信息监管滞后、无法提供决策的问题。通过结合相机采集加油区域图像和智能分析算法的方式对加油站原有的监控系统进行升级赋能,代替原有的人工抽查。通过此方法可以对加油站的加油员进行全面监管和评估,同时因为是机器作业,可以保证及时、客观、准确的分析,而且通过算法分析结果,上级领导可以清楚明确了解加油站员工的作业状态,方便监督管理。
附图说明
结合附图,可以得到对本发明实施例的进一步理解,从本发明的权利要求和优选实施例的以下描述可以获得本发明的其它特征和优点。在不超出本发明的范围的情况下,在这种情况下可以按任何期望的方式将图中所示的不同实施例的单独特征加以组合。在附图中:
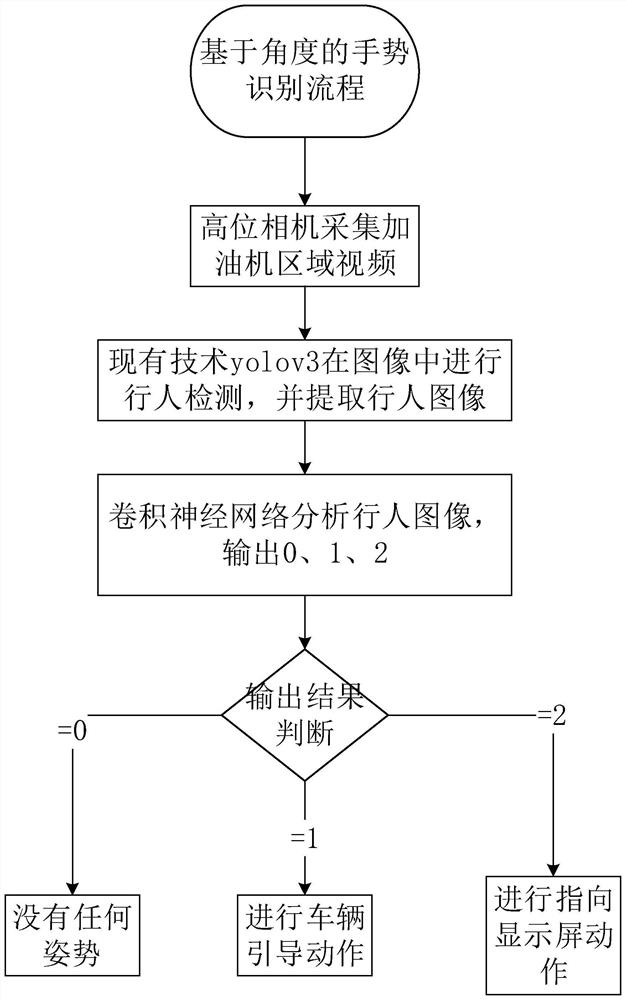
图1为本发明的逻辑流程框图;
图2为实施例中的高位相机位置示意图;
图3为本发明的卷积核;
图4为卷积神经网络。
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
实施例:
如图1所示,在本实施例中,一种基于行人手臂角度分析的加油员手势识别的方法,包括如下步骤:
S1:监控系统实时采集加油机附近区域的实时视频,每秒截取一张图像,得到实时图像集;
S2:使用YOLO V3算法对实时图像集中的行人进行检测,提取图像中的行人,得到行人图像集;
S3:通过图像中行人的手臂角度对行人进行类别定义,0代表手臂角度为0度到60度的行人,1代表手臂角度为61度到100度的行人,2代表手臂角度为101度到180度的行人;
S4:构建卷积神经网络,使用卷积神经网络对所述行人图像集进行训练,得到训练好的卷积神经网络;
S5:利用训练好的卷积神经网络对行人图像集进行判定,若输出为0,则判定行人无姿势;若输出为1,则判定行人保持车辆引导姿势;若输出为2,则判定行人保持指向显示屏姿势。
如图2所示,步骤S1中的监控系统包括多个高位相机,高位相机的安装位置与对应该高位相机所监控的加油机水平距离为10米,距地面高度为3米。
优选的,所述步骤S2中提取图像中的行人的具体方法为:对图像中的行人进行截取,生成仅包含行人的图像。
优选的,步骤S3中图像中行人的手臂角度的计算公式为:
C=arctan((y
其中,取图片中心点作为原点建立坐标系,(x
优选的,步骤S4包括如下子步骤:
S41:选择30000张行人图像集作为训练数据集,3000张行人图像集作为训验证数据集;
S42:如题3所示,定义标准卷积核,卷积核尺寸为3*3*n;
S43:如图4所示,搭建卷积神经网络,从卷积神经网络的输入端输入256*256*3,从卷积神经网络的输出端输出1*1*3,即时输出数据分别为0、1、2三类数据的概率;
S44:定义损失函数L,损失函数L的计算公式如下:
其中,
S45:通过损失函数,利用梯度下降法对训练集进行训练,优化卷积神经网络;
S46:使用卷积神经网络对验证集进行验证,当验证精度大于95%且不再提升时结束卷积神经网络训练,从而得到训练好的卷积神经网络。
优选的,步骤S41中的训练数据集和验证数据集中,均包含比例为1:1:1的0、1和2三类数据。
结合实施例可以看出,本发明克服了前述的现有技术中存在的油企管理者对油站的加油员的行为监管不到位,对油站的对外形象等信息监管滞后、无法提供决策的问题。通过结合相机采集加油区域图像和智能分析算法的方式对加油站原有的监控系统进行升级赋能,代替原有的人工抽查。通过此方法可以对加油站的加油员进行全面监管和评估,同时因为是机器作业,可以保证及时、客观、准确的分析,而且通过算法分析结果,上级领导可以清楚明确了解加油站员工的作业状态,方便监督管理。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种基于行人手臂角度分析的加油员手势识别的方法
- 一种燃煤发电机组运行人员行为分析提取方法