一种煤矿用窄体回转式四臂锚杆钻机
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及煤矿井下巷道支护钻孔设备领域,具体而言,特别涉及一种煤矿用窄体回转式四臂锚杆钻机。
背景技术
随着我国经济的快速发展,对能源特别是煤炭的需求越来越大,国内煤炭的开采量也节节攀高。在煤炭产量逐年增大的同时,煤矿井下的安全工作也就越来越重要,许多原始的作业方式正在面连着先进技术的挑战。在一些中厚煤层的矿区,由于煤层厚度有限,巷道高度普遍不高,大多在2-3.5米之间,许多大型的锚护作业设备根本进不去,只能用人力对巷道顶板进行锚护作业,不仅费时费力,而且存在着极大的安全隐患。由于人工作业消耗的时间长,效率低下,严重影响了掘进机的日进尺数,也就严重制约了煤炭的生产效率,所以在一些煤层较薄、巷道较低的煤矿,煤炭产量普遍不高。
发明内容
本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。有鉴于此,本发明需要提供一种结构设计紧凑、作业效率高,且大大提升操作人员的安全性和支护安全性能的煤矿用窄体回转式四臂锚杆钻机。
本发明提供一种煤矿用窄体回转式四臂锚杆钻机,包括:底平台、行走机构、以及设在所述底平台顶面上的动力机构和控制机构,所述行走机构设在所述底平台的底面上且两者之间设有回转机构,所述控制机构分别与所述动力机构和所述行走机构连接,以对所述动力机构和所述行走机构进行控制,所述底平台上设有滑动座,所述滑动座的两端设有结构一致且左右对称设置的第一执行机构和第二执行机构,所述第一执行机构和所述第二执行机构分别与所述动力机构连接,以通过所述控制机构操控所述第一执行机构和所述第二执行机构沿所述滑动座做相向/背向运动。
根据本发明的一个实施例,所述底平台的底面上设有位于所述行走机构两侧相对设置的支腿机构,所述支腿机构包括与所述底平台连接的底板、转动连接在所述底板上的侧板,所述底板上设有支腿油缸,所述支腿油缸的活塞杆与所述侧板连接。
根据本发明的一个实施例,所述底平台的顶面上设有结构一致且对称设置的第一支护组件和第二支护组件,所述第一支护组件设在所述第一执行机构的内侧,所述第二支护组件设在所述第二执行机构的内侧。
根据本发明的一个实施例,所述滑动座通过固定座设在所述底平台上,所述固定座包括与所述底平台连接的固定板以及与所述固定板垂直设置的安装板。
根据本发明的一个实施例,所述第一执行机构包括滑动板、钻架、钻杆油缸、直线导轨机构和钻杆机构,所述滑动板通过滑动油缸可在所述滑动座中移动,所述滑动油缸设在所述安装板上,所述钻架转动连接在所述滑动板上并通过支撑油缸带动所述钻架摆动,所述钻杆机构设在所述直线导轨机构上,且所述直线导轨机构固定在所述钻架上,并由所述钻杆油缸带动所述钻杆机构在所述直线导轨机构上移动。
根据本发明的一个实施例,所述动力机构包括依次间隔开设置在所述底平台上的动力电机和液压站,所述动力电机与所述行走机构连接,所述液压站用于提供钻机上各种油缸所需的液压动力。
根据本发明的一个实施例,所述控制机构包括远程信号发生器、无线遥控接收器和方形磁力启动器,所述远程信号发生器发射动作信号并通过设在所述动力电机内侧的所述无线遥控接收器接收动作信号后对钻机各机构动作进行控制,所述方形磁力启动器与所述动力电机连接。
根据本发明的一个实施例,所述第一执行机构为并排设在所述滑动座上且间隔开设置的两组,所述第二执行机构为并排设在所述滑动座上且间隔开设置的两组。
根据本发明的一个实施例,所述第一支护组件包括垂直设在所述底平台上的支撑杆、横向设在所述支撑杆上的水平杆以及设在所述水平杆一端的防护杆,所述支撑杆内部设有带动所述水平杆连接上下移动的顶升油缸。
根据本发明的一个实施例,所述液压站的一侧设有散热器。
本发明的煤矿用窄体回转式四臂锚杆钻机,通过行走机构可以在巷道宽度和高度有限的空间内自主行走,并可在狭窄的通道内与掘进机进行错车,同时底平台具备90度回转功能,能够将钻杆机构由安装位置旋转到作业位置,同时在滑动座上完成了四组钻杆机构的排布,实现四根顶锚同时作业,大大节省了人力,提高了作用效率,在底平台上采用液压顶板支护组件,有效提升了设备的支护安全性能。
进一步地,控制组件中通过远程信号发生器发射动作信号,无线遥控接收器接收动作信号后并对钻机各机构动作进行控制,有效提高了操作人员的安全性以及设备的灵活控制性能。
附图说明
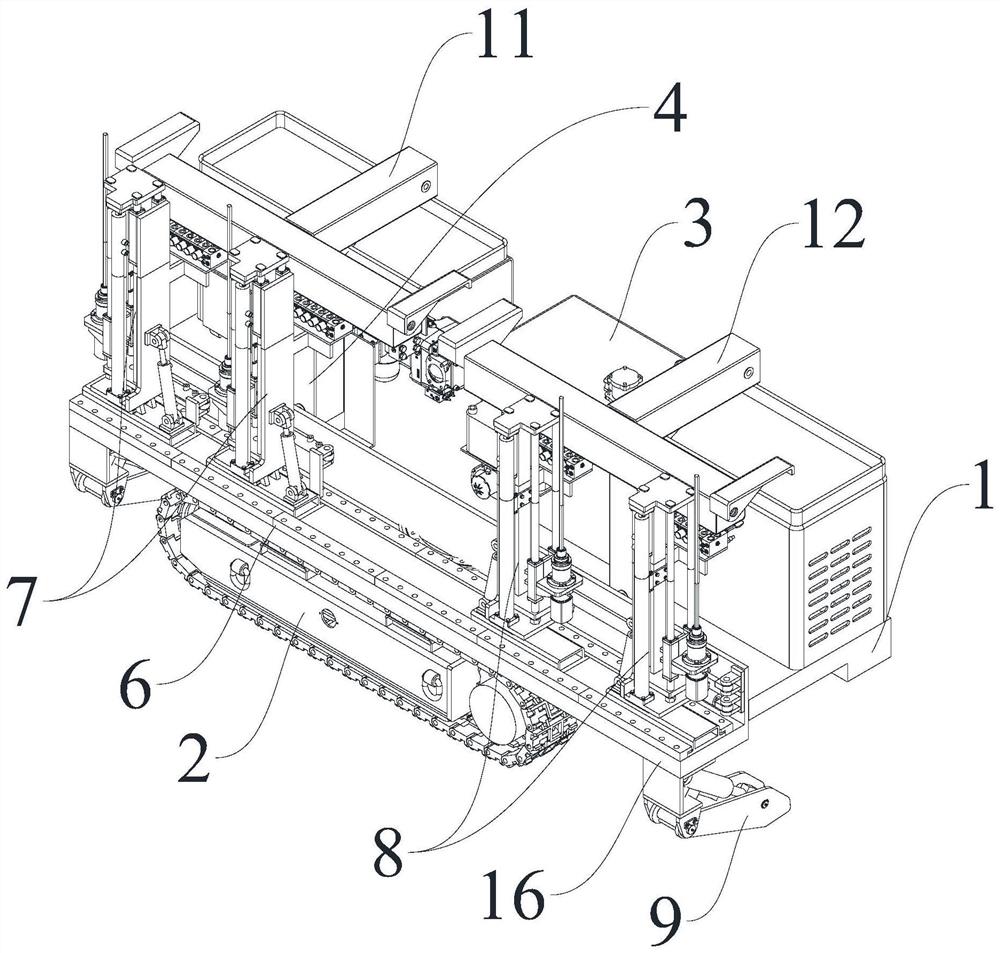
图1是根据本发明的一种煤矿用窄体回转式四臂锚杆钻机的立体图。
图2是根据本发明的一种煤矿用窄体回转式四臂锚杆钻机的主视图。
图3是根据本发明的一种煤矿用窄体回转式四臂锚杆钻机的俯视图。
图4是根据本发明的一种煤矿用窄体回转式四臂锚杆钻机的左视图。
图5是根据本发明的一种煤矿用窄体回转式四臂锚杆钻机的部分结构示意图。
附图标记:1-底平台;2-行走机构;3-动力机构;4-控制机构;5-回转机构;6-滑动座;7-第一执行机构;8-第二执行机构;9-支腿机构;11-第一支护组件;12-第二支护组件;13-支撑杆;14-水平杆;15-防护杆;16-固定座;17-滑动板;18-钻架;19-钻杆油缸;20-直线导轨机构;21-钻杆机构;22-滑动油缸;23-支撑油缸;24-操作阀组;31-动力电机;32-液压站;41-无线遥控接收器;42-方形磁力启动器;91-底板;92-侧板;93-支腿油缸;161-固定板;162-安装板;321-散热器。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
如图1至图5所示,根据本发明的具体实施例,一种煤矿用窄体回转式四臂锚杆钻机包括:底平台1、行走机构2、以及设在底平台1顶面上的动力机构3和控制机构4,行走机构2设在底平台1的底面上且两者之间设有回转机构5,控制机构4分别与动力机构3和行走机构2连接,以对动力机构3和行走机构2进行控制,底平台1上设有滑动座6,滑动座6的两端设有结构一致且左右对称设置的第一执行机构7和第二执行机构8,第一执行机构7和第二执行机构8分别与动力机构3连接,以通过控制机构4操控第一执行机构7和第二执行机构8沿滑动座6做相向/背向运动,需要理解的是,其中行走机构2为履带式行走结构,并由控制机构4进行控制,回转机构5包括用于连接底平台1和行走机构2的回转盘以及驱动回转盘转动的回转油缸。
本发明的煤矿用窄体回转式四臂锚杆钻机,通过行走机构2可以在巷道宽度和高度有限的空间内自主行走,并可在狭窄的通道内与掘进机进行错车,同时底平台1具备90度回转功能,能够将钻杆机构21由安装位置旋转到作业位置,同时在滑动座6上完成了四组钻杆机构21的排布,实现四根顶锚同时作业,大大节省了人力,提高了作用效率,在底平台1上采用液压顶板支护组件,有效提升了设备的支护安全性能。
如图1和图5所示,底平台1的底面上设有位于行走机构2两侧相对设置的支腿机构9,支腿机构9包括与底平台1连接的底板91、转动连接在底板91上的侧板92,底板91上设有支腿油缸93,支腿油缸93的活塞杆与侧板92连接,通过支腿油缸93的伸缩,实现侧板92的伸出和收回,在侧板92伸出状态时与巷道底面抵接,以有效提升锚杆钻机工作时的稳定性。
如图1至图5所示,底平台1的顶面上设有结构一致且对称设置的第一支护组件11和第二支护组件12,第一支护组件11设在第一执行机构7的内侧,第二支护组件12设在第二执行机构8的内侧,其中第一支护组件11和第二支护组件12均包括垂直设在底平台1上的支撑杆13、横向设在支撑杆13上的水平杆14以及设在水平杆14一端的防护杆15,支撑杆13内部设有带动水平杆14连接上下移动的顶升油缸(图中未示出),当锚杆钻机移动到指定工作区域且稳定后,将第一支护组件11和第二支护组件12中的防护杆15升起顶住巷道顶板,从而大大提升设备的支护安全性能。
如图1和图5所示,滑动座6通过固定座16设在底平台1上,固定座16包括与底平台1连接的固定板161以及与固定板161垂直设置的安装板162,第一执行机构7和第二执行机构8均包括滑动板17、钻架18、钻杆油缸19、直线导轨机构20和钻杆机构21,滑动板17卡接于滑动座6中并通过滑动油缸22可在滑动座6中移动,滑动油缸22设在安装板162上,钻架18转动连接在滑动板17上并通过支撑油缸23带动钻架18摆动,钻杆机构21设在直线导轨机构20上,且直线导轨机构20固定在钻架18上,并由钻杆油缸19带动钻杆机构21在直线导轨机构20上移动,其中钻杆机构21包括设在直线导轨机构20上的钻杆电机以及连接在钻杆电机上的钻杆,在钻架18的侧边中心区域设有操作阀组24,以方便对第一执行机构7和第二执行机构8进行操作,需要理解的是,通过支撑油缸23的伸缩,完成钻杆机构21在垂直方向上进行预定角度的倾斜,以调整钻杆机构21施工作业时的钻孔方向,且有效提高了钻杆机构21的作业半径,完成锚杆钻机顶部边锚的钻孔作业。
如图1至图3所示,动力机构3包括依次间隔开设置在底平台1上的动力电机31和液压站32,动力电机31与行走机构2连接,动力电机31还与钻杆电机连接,液压站32用于提供钻机上各种油缸所需的液压动力,即为钻机上的支腿油缸93、顶升油缸、支撑油缸23、钻杆油缸19和滑动油缸22提供液压动力,其中动力电机31和液压站32上均扣接有防护罩。
如图1至图4所示,控制机构4包括远程信号发生器(图中未示出)、无线遥控接收器41和方形磁力启动器42,远程信号发生器发射动作信号并通过设在动力电机31内侧的无线遥控接收器41接收动作信号后对钻机各机构动作进行控制,方形磁力启动器42与动力电机31连接且方形磁力启动器42上扣接有防护罩,其中远程信号发生器可以是智能手机、平板电脑或计算机,通过无线遥控功能对锚杆钻机进行远程操控,有效提高了操作人员的安全性以及设备的灵活控制性能。
如图1至图3、图5所示,第一执行机构7为并排设在滑动座6上且间隔开设置的两组,第二执行机构8为并排设在滑动座6上且间隔开设置的两组,即滑动座6上并排设置了四组执行机构,实现四组钻杆机构21同时作业,大大节省了人力,提高了作业效率。
如图1和图3所示,液压站32的一侧设有散热器321,散热器321用于对液压站32长时间工作时产生的热量进行降温处理,延长锚杆钻机的工作时间。
如图1至图5所示,本发明的一种煤矿用窄体回转式四臂锚杆钻机的工作过程如下:
当掘进机采煤进尺到预定距离后,掘进机后退,四臂锚杆钻机沿掘进机和巷道侧帮之间的狭窄通道通过行走机构2进入到掘进工作面进行打顶锚作业,打锚杆作业前,将四臂锚杆钻机的机身位置调整到巷道中心,并调整机身前后位置,然后将回转机构5进行回转并驱动底平台1旋转90度,使四组钻杆机构21面对掘进工作面,通过远程信号发生器操控使第一支护组件11和第二支护组件12上部的防护杆15升起并顶住巷道顶板,然后控制滑动油缸22伸出使其带动各自顶端的钻杆机构21移动沿滑动座6移动,并驱动支腿油缸93使侧板92伸出并抵接在巷道底面上,操作工根据顶锚施工位置调整钻杆机构21的横向位置,此时可操纵操作阀组24上的手柄驱动滑动油缸22,将滑动板17移动到适当位置,当四组钻杆机构21的位置调整好后,可根据边锚打孔的位置调整两端钻杆机构21垂直方向的倾斜角度,此时可通过操作阀组24上的手柄驱动支撑油缸23,使两端外侧的钻杆机构21分别向外摆动,当四组钻杆机构21的位置完全确定无误后,操作工开始实施顶锚施工作业;
顶锚施工作业完成后,操作工首先驱动支撑油缸23将两端钻杆机构21扶正,然后分别驱动四组钻杆机构21的滑动油缸22将各钻杆机构21恢复到初始位置,同时驱动支腿油缸93,将侧板92缩回之后将第一支护组件11和第二支护组件12的防护杆15下放至安装位置,然后驱动履带行走机构2使机身后退预定距离,驱动回转机构5,将底平台1旋转90度,机身恢复到原始安装位置,通过远程信号发生器驱动履带行走机构2,使机身沿掘进机与巷道侧边之间的通道后退到到指定位置,等待下一次顶锚施工作业。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种煤矿用窄体回转式四臂锚杆钻机
- 一种煤矿用窄体回转式四臂锚杆钻机