超声探头定位系统
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种超声探头定位系统,并且涉及一种用于控制超声探头定位系统的方法。
背景技术
在辐射处置(图像引导的RT、IGRT)的过程期间的频繁成像能够辅助提供对目标的更准确辐射剂量递送和所递送的到正常组织的辐射的更小毒性。在目前的临床实践中,这样的频繁成像使用锥形射束计算机断层摄影(CT)扫描器来合适地执行。然而,这种成像模态需要对基准标记的有创植入、将额外的辐射剂量添加到患者、并且不允许分次中运动监测。
备选方案涉及对超声(US)成像的使用。US成像对于患者是无害的、相对便宜、并且允许实时的体积器官跟踪。超声成像结合诸如例如外部射束辐射治疗(外部射束RT)或导管插入流程的医学处置技术来使用。
公开US 2012/0083692 A1描述了一种用于在医学诊断超声成像中的接触压力控制的系统。根据该公开,对患者体内的组织的挤压可以使用超声扫描来测量。可以获得用于诊断的感兴趣区域中的期望的挤压量。所描述的是,例如在乳房成像中,用于对乳房的一部分进行成像的期望的挤压与从超声数据测量到的挤压进行比较。一旦实现期望的组织挤压,就维持由换能器所施加的压力,同时进行诊断扫描。例如,机器人臂锁定或者以另外的方式维持在扫描期间的压力。
发明内容
发明人已经意识到,在不同时间涉及多个不同处置分次的处置的过程中,给定感兴趣区域的位置和形状能够由于各种原因而改变。例如,在膀胱或直肠是感兴趣区域的情况下,可以在不同的处置分次中给予不同的填充。事实上,这样的改变不仅可以发生在不同的处置分次之间(分次间),而且也可以发生在单个处置分次期间(分次中)。
将有益的是,鉴于要被成像的感兴趣区域的位置和形状的分次间以及分次中改变而改善由超声成像技术提供的图像信息。
根据本发明的第一方面,提出了一种超声定位系统。所述超声探头定位系统包括可控制可驱动定位单元,其用于保持超声探头单元,并且用于移动所述超声探头单元并且将其定位在目标位置处。所述超声探头定位系统还包括定位控制单元,所述定位控制单元被配置为:提供指示建立所述超声探头单元与外部对象的机械接触的目标位置的目标定位数据,并且在将所述超声探头移动并且定位在所述目标位置处时控制所述机械定位单元。所述定位单元包括力致动单元,所述力致动单元可操作性地可连接到所述超声探头单元,并且所述力致动单元被配置为在所述目标位置处建立所述机械接触后逆着由所述外部对象施加在所述超声探头单元上的反作用力将机械压迫力施加在所述超声探头单元上。所述力致动单元还被配置为:响应于所述反作用力的反作用力的量的变化而通过增大或减小所述压迫力的量来调整所述机械压迫力的压迫力的量,以便维持由所述机械压迫力逆着所述反作用力而施加的预定的净压迫力的量。在医学应用的情况下,外部对象通常是患者,并且感兴趣区域是身体的内部区域。
根据第一方面,定位单元的力致动器被配置为通过将机械压迫力施加在超声探头单元上而维持由机械压迫力逆着反作用力而施加的预定的净压迫力的量。该机械压迫力因此具有可能改变的量并且取决于预定的净压迫力的量以及由外部对象所施加的反作用力的量。一旦已经在超声探头与外部对象之间建立了机械接触,外部对象就将反作用力施加在超声探头上,反作用力可以具有取决于外部对象的当前姿态、运动和内部状况而随着时间可变的量。
第一方面的超声定位系统因此被有利地配置为不仅确保完全相同的定位,而且也确保在超声探头单元与外部对象之间的完全相同的净压迫力状况。关于所述目标位置的信息由定位控制单元以目标定位数据的形式来提供。其因此在分次间和分次中超声监测中在以可再现力将超声探头单元定位在对象上的相同目标位置处时实现超声探头单元的徒手正确定位。以这种方式,能够防止当前分次中或者分次之间的器官的探头力诱发的位移。另外,在处置分次期间、甚至在有限的身体运动期间维持在皮肤上的相对恒定的压迫力,防止将降低图像质量的在探头与皮肤之间的空气的存在。
所述超声定位系统因此通过维持完全相同的净压迫力的超声探头与外部对象的机械接触来实现特别可靠的超声图像信息。关于感兴趣区域的分次间改变,超声探头相对于外部对象的位置和压迫力两者的可再现性实现了从在辐射处置的不同分次处获取的超声图像获得的图像信息的经改善的可比较性。关于感兴趣区域的分次中改变,因此实现了对象的运动可能发生而不损失超声探头单元与对象之间的声学耦合。在大多数情况下,对象的运动服从由外部对象所施加的反作用力的改变。同样地,在这些情况下,调整由机械压迫力逆着由外部对象施加的反作用力而施加的压迫力的量以维持预定的净压迫力的量。
在下文中,将描述本发明的第一方面的超声定位系统的不同实施例。
在一个实施例中,所述超声探头定位系统还包括在所述超声探头单元的接触表面上的力传感器单元。所述力传感器单元被配置为测量所述反作用力的量,并且提供指示由所述外部对象施加的所述反作用力的当前量的反作用力信号。在具体实施例中,所述反作用力信号被用户接口单元接收,所述用户接口单元被配置为显示指示反作用力的当前量的信号。在实施例中,所述用户接口被配置为当所述反作用力信号指示反作用力的量超过预定的阈值时输出警报信号。警报信号可以例如指示不能够被超声探头定位系统处理的对象或患者运动的处理错误。
在包括力传感器单元的超声探头定位系统的实施例中,所述定位控制单元额外地包括力控制单元,所述力控制单元被配置为:接收所述反作用力信号,使用接收到的反作用力信号和所述预定的净压迫力的量来确定要被施加以用于实现或维持所述预定的净压迫力的量的目标压迫力的量,以及生成并且提供力控制信号。在该具体实施例中,所述力致动单元包括控制输入部和主动力致动器,所述控制单元用于接收所述力控制信号,所述主动力致动器被配置为响应于接收到所述力控制信号而生成并且施加所述目标压迫力的量。该实施例因此有利地被配置为在给定范围内施加主动维持或稳定的力,而无需用户干预。具体实施例还包括用户接口单元,其中,关于反作用力的当前量的反馈被提供给用户或外部设备。
包括力传感器单元或力传感器单元和力控制单元的超声探头定位系统的实施额外地包括用户接口单元,所述用户接口单元被配置为接收所述反作用力信号,并且经由所述用户接口单元提供指示所述当前反作用力的量的状态输出信号。
本发明的超声探头定位系统的另一实施例还包括光学跟踪系统。所述光学跟踪单元被连接到所述定位控制单元,并且被配置为检测一个或多个界标特征的相应界标位置,并且依据检测到的界标位置来确定指示所述目标位置的所述定位数据。界标特征的非限制性范例包括被用于定位所述目标位置的标记。所述标记能够例如在相对于所述目标位置的预定位置处被附接到外部对象或者对象的周围。具体实施例包括被配置为接收由所述标记发射或反射的辐射的光学跟踪单元。通过对标记的使用,所述目标位置能够被光学跟踪单元发现、跟踪、或者发现并跟踪。在另一实施例中,所述光学跟踪单元额外地或备选地被配置为通过使用外部对象的解剖或几何性质来应用已知的图像处理技术以确定目标定位数据。
所述光学跟踪单元能够结合根据本发明的第一方面的实施例来使用。
在备选实施例中,所述目标定位数据由用户基于坐标空间中的预期目标位置来手动地输入。在另一实施例中,对象特异性目标定位数据额外地或备选地被存储在数据库中。
在超声探头定位系统的另外的实施例中,所述力致动单元包括电磁致动器,所述电磁致动器用于施加所述机械压迫力,并且被配置为响应于所述反作用力的所述变化而维持所述预定的净压迫力的量。
备选地,在另一实施例中,所述力致动单元包括用于施加所述机械压迫力的弹簧致动器,所述弹簧致动器响应于所述反作用力的所述变化而通过在所述弹簧致动器的总弹性范围内被动地调整其弹簧长度来维持所述预定的净压迫力的量。在实施例中,所述弹簧致动器包括可弹性变形弹簧。在备选实施例中,所述弹簧致动器包括流体致动的弹簧,其中,流体涉及气体或液体。
有利地,在包括弹簧致动器的探头定位系统的实施例中,所述定位控制单元被配置为提供所述目标定位数据,以便使所述弹簧致动器在所述目标位置处呈现在总弹性范围内的部分挤压状态。这允许沿着两个相反方向(亦即所施加的压迫力的方向和所述反作用力的方向)的对外部对象的运动的补偿。优选地,所述弹簧致动器的所述总弹性范围包括在与松弛弹簧状态相关联的第一弹簧长度和与完全挤压弹簧状态相关联的第二弹簧长度之间的操作范围,并且其中,当相对于所述松弛弹簧状态进行测量时,所述部分挤压状态对应于所述弹簧致动器的挤压为落在所述操作范围的中间三分之一内的长度的量。
优选地,所述弹簧致动器被选取为使得在若干厘米的长度内,所施加的压迫力的量保持相对恒定。当所述超声探头单元被定位为在所述目标位置处与对象相接触时,所述弹簧致动器将相对恒定并且因此可再现的压迫力施加在其上。通过以弹簧致动器最初被部分挤压的这样的方式定位所述超声探头单元,在给定范围内并且沿着所施加的压迫力的方向或沿着反作用力的方向的患者的任何有限的运动能够由弹簧致动器通过在弹性范围内进一步挤压或解挤压来补偿。
在特别有利于补偿患者的呼吸诱发的运动的另一实施例中,操作范围具有与由于目标位置处的呼吸诱发的运动而预期的位移相关联的延伸。在具体实施例中,所述操作范围具有4厘米的延伸,并且所述机械压迫力的量具有超过所述操作范围至多百分之十的变化。其他实施例包括具有依据外部对象有利地选取的更大或更小延伸范围的弹簧致动器。
本发明的第一方面或者其实施例中的任意实施例的超声定位系统因此能够有利地结合诸如例如外部射束辐射治疗(外部射束RT)或导管插入流程的医学处置技术来使用。在外部射束RT的示范性情况下,所述超声探头被定位在患者身上,使得要被处置的目标区域和应当接收尽可能低的辐射的危险区域被成像。目标区域或危险区域的对应位置或体积之间的分次间差异被评估,并且被用于重新校准外部射束RT的辐射剂量递送。
根据本发明的第二方面,提出了一种用于控制对超声探头定位系统的操作的方法。所述方法包括:
提供指示建立超声探头单元与外部对象的机械接触的目标位置的目标定位数据;
可控制地移动所述超声探头单元,并且将其定位在所述目标位置处;
在所述目标位置处建立所述机械接触后逆着由所述外部对象施加在所述超声探头单元上的反作用力将机械压迫力施加在所述超声探头单元上;以及
响应于所述反作用力的反作用力的量的变化而通过增大或减小所述压迫力的量来调整所述机械压迫力的压迫力的量,以便维持由所述机械压迫力逆着所述反作用力而施加的预定的净压迫力的量。
第二方面的方法共享超声探头定位系统以及其实施例中的任意实施例的优点。
在第二方面的方法的实施例中,所述方法还包括:检测一个或多个界标特征的相应界标位置,并且依据检测到的界标位置来确定指示所述目标位置的所述定位数据。
备选地或额外地,第二方面的方法的另一实施例包括测量所述反作用力的量,并且提供指示由所述外部对象施加的所述反作用力的当前量的反作用力信号。
在又一实施例中,调整所述机械压迫力的压迫力的量包括:在力控制单元处接收所述反作用力信号,使用接收到的反作用力信号和所述预定的净压迫力的量来确定要被施加用于实现或维持所述预定的净压迫力的量的目标压迫力的量,生成并且向力致动单元提供力控制信号,并且响应于接收到所述力控制信号而生成并且施加所述目标压迫力的量。
应当理解,根据权利要求1的超声探头定位系统以及根据权利要求12的用于控制所述超声探头定位系统的操作的方法具有具体地与在从属权利要求中限定的相似和/或相同的优选实施例。
应当理解,本发明的优选实施例也能够是独立权利要求或以上实施例与相应从属权利要求的任意组合。
参考下文所描述的实施例,本发明的这些方面和其他方面将是显而易见的并且得到阐明。
附图说明
在以下附图中:
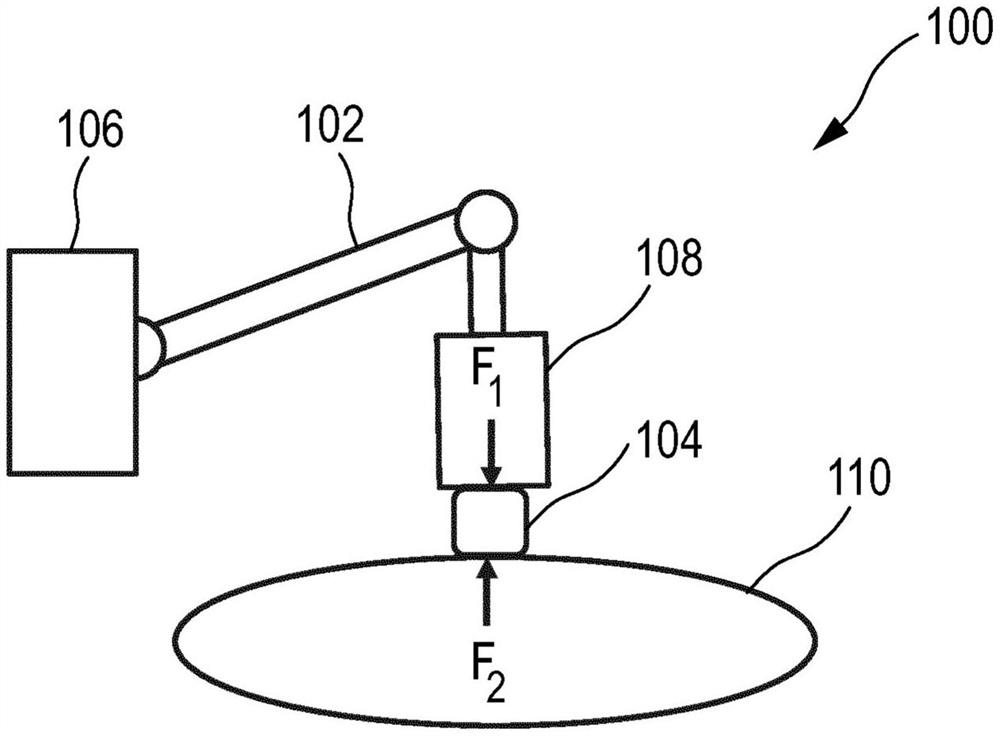
图1示出了在外部对象上使用的超声探头定位系统的实施例的示意性表示,
图2示出了在外部对象上使用的超声探头定位系统的另一实施例的示意性表示,
图3a示出了在外部对象上使用的超声探头定位系统的另一实施例的示意性表示,
图3b示出了在外部对象上使用的超声探头定位系统的另一实施例的示意性表示,
图4示出了在外部对象上使用的超声探头定位系统的另一实施例的示意性表示,
图5示出了在超声探头定位系统的具体实施例中使用的弹簧致动器的范例,并且
图6示出了用于操作超声探头定位系统的方法的实施例的流程图。
具体实施方式
图1示出了用于将超声探头单元104定位到外部对象110上的超声探头定位系统100的实施例的示意性框图。超声探头定位系统100包括用于保持超声探头单元104并且用于将其移动并且定位在外部对象110的目标位置处的可控制可驱动定位单元102。在该具体的超声探头定位系统中,所述定位单元是机械臂。在该具体情况下,外部对象110是超声监测的患者对象。超声探头定位系统100包括定位控制单元106,定位控制单元106被配置为:提供指示建立超声探头单元104与患者110的机械接触的目标位置的目标定位数据,并且在将超声探头移动并且定位在所述目标位置处时控制机械定位单元102。
定位单元102包括可操作性地可连接到超声探头104的力致动单元108。所述力致动单元被配置为在目标位置处建立机械接触后逆着由外部对象施加在超声探头单元上的反作用力(F
因此,如果患者110在与所述超声探头单元接触时移动并且患者的移动改变被施加在所述超声探头单元上的反作用力的量,所述力致动单元被配置为增大或减小在超声上的所施加的压迫力以使得净压迫力的量保持在相对恒定的值处。所述力致动单元被有利地配置为对可预测移动做出响应,所述可预测移动包含目标位置的相对低的位移,诸如但不限于:患者的呼吸诱发的运动、患者的心跳诱发的运动、患者的内部器官(诸如膀胱或直肠)的填充、小幅度的无意识移动、打嗝等。
超声探头定位系统100也在分次间成像中(例如在作为针对癌症的治愈性处置选项的示例的外部射束辐射治疗(外部射束RT)的背景下)实现经改善的成像结果。其旨在辐照感兴趣区域(ROI)的肿瘤,同时尽可能多地不伤害正常组织(所谓的危险器官(OAR)),以便防止可能导致不想要的副作用的过度毒性。规定的辐射剂量通常在若干处置分次中被递送到患者,若干处置分次能够延续若干个月。通过将超声探头定位在患者的身体的相同位置处并且在不同的分次中设置超声探头在身体上的完全相同的力/压迫力,在不同处置分次中由US探头获得的成像信息能够被更好地比较,并且递送关于需要被考虑以用于调整辐射处置的位置和空间延伸的感兴趣区域的任何变化的更精确信息。
图2示出了超声探头定位系统200的另一实施例的示意性框图。以下讨论将聚焦于将图2的超声探头定位系统200与图1的超声探头定位系统100区别开的特征。由超声探头定位系统100和200共享的那些技术特征涉及使用相同的数字,除了第一数位,对于图1的超声探头定位系统100,第一数位为“1”,而图2的超声探头定位系统200,第一数位为“2”。
超声探头定位系统200包括力传感器单元212。力传感器单元212被布置在超声探头单元204的接触表面上。力传感器单元212被配置为在建立机械接触后测量由患者210施加在超声探头单元204上的反作用力的量(例如图1中的F
图3a和图3b示出了超声探头定位系统300.a和300.b的两个相应实施例的两个示意图。以下讨论将聚焦于将图3a和图3b的超声探头定位系统300.a和300.b与图2的超声探头定位系统200区别开的特征。被超声探头定位系统300.a、300.b和200共享的那些技术特征涉及使用相同的数字,除了第一数位,对于图2的超声探头定位系统200,第一数位为“2”,而对于图3a和图3b的超声探头定位系统300.a和300.b,第一数位为“3”。在超声探头定位系统300.a和300.b中不同的特征通过数字中的字母“a”或“b”的存在来指示。
超声探头定位系统300.a包括力传感器单元312.a,力传感器单元312.a被配置为向用户接口单元318.a提供指示由外部对象施加的反作用力的当前量的反作用力信号。力传感器单元300.a也向力控制单元314.a提供反作用力信号,如已经参考图2所描述的。在不包括力控制单元的备选超声探头定位系统中,所述力传感器单元被配置为仅向所述用户接口单元提供所述反作用力信号。
超声探头定位系统300.b包括力传感器单元312.b,力传感器单元312.b被配置为经由力控制单元314.b向用户接口318.b提供所述反作用力信号。因此,力控制单元314.b接收所述反作用力信号,基于所述反作用力信号确定所述力控制信号,并且还进一步向用户接口单元318.b提供从力传感器单元312.b接收到的反作用力信号。
特别有利的用户接口被配置为当反作用力信号指示反作用力的量超过预定的阈值时输出警报信号。警报信号可以例如指示不能够由所述超声探头定位系统处理的对象或患者运动的处理错误。
图4示出了超声探头定位系统400的另一实施例的示意性框图。以下讨论将聚焦于将图4的超声探头定位系统400与图1的超声探头定位系统100区别开的特征。由超声探头定位系统100和400共享的那些技术特征涉及使用相同的数字,除了第一数位,对于图1的超声探头定位系统100,第一数位为“1”,而对于图4的超声探头定位系统400,第一数位为“4”。超声探头定位系统400包括光学跟踪单元420,光学跟踪单元420被连接到所述定位控制单元,并且被配置为检测一个或多个界标特征422的相应界标位置并且依据检测到的界标位置来确定指示所述目标位置的定位数据。界标特征422是被配置为发射或反射能够由所述光学跟踪单元检测的辐射的标记。所述标记能够例如在相对于目标位置的预定位置处被附接到外部对象或对象的周围。通过对标记422的使用,所述目标位置能够由光学跟踪单元420发现、跟踪、或者发现并跟踪。备选光学跟踪单元额外地或备选地被配置为通过使用外部对象的解剖或几何性质来应用已知的图像处理技术以确定目标定位数据。
力致动单元108、208、308或408可以包括用于施加机械压迫力的电磁致动器,并且被配置为响应于反作用力的变化而维持预定的净压迫力的量。备选地,力致动器单元108、208、308或408可以包括用于施加机械压迫力的弹簧致动器,所述弹簧致动器响应于反作用力的变化而通过在弹簧致动器的总弹性范围内被动地调整其弹簧长度来维持预定的净压迫力的量。在一些力致动单元中,所述弹簧致动器包括可弹性变形弹簧。在备选的力致动单元中,所述弹簧致动器包括流体致动的弹簧。
图5示出了在超声探头定位系统的具体实施例中使用的弹簧致动器500在三种不同状态下的范例。在第一状态500.a下,弹簧500处于松弛状态,并且具有第一弹簧长度L1。在第二状态500.b下,弹簧处于完全挤压状态,并且具有第二弹簧长度L2。弹簧的最大操作范围OR由长度L1和L2的差来定义。
优选地,包括弹簧500的超声探头定位系统的探头定位单元被配置为提供所述目标定位数据,以便使所述弹簧致动器在目标位置处呈现在总弹性范围内并且更优选在操作范围内的部分挤压状态500.c。甚至更优选地,部分挤压状态对应于弹簧致动器的挤压为落在操作范围的中间三分之一502内的长度的量L3。
在具体的超声探头定位系统中,所述弹簧致动器的操作范围具有至少4cm的延伸,并且所述机械压迫力的量具有超过操作范围至多百分之十的变化。其他弹簧致动器具有操作范围的更大延伸。延伸的选择取决于将引起反作用力的改变的患者的预期移动的类型和幅度。
图6示出了用于控制超声探头定位系统的操作的方法600的实施例的框图。所述方法包括步骤606,其中,提供目标定位数据,所述目标定位数据指示建立超声探头单元与外部对象的机械接触的目标位置。在步骤608中,所述方法包括可控制地移动所述超声探头单元,并且将其定位在所述目标位置处。进一步地,在步骤610中,在目标位置处建立机械接触后逆着由外部对象施加在超声探头单元上的反作用力将机械压迫力施加在超声探头单元上。最后,在步骤612中,响应于所述反作用力的反作用力的量的变化而调整机械压迫力的压迫力的量,以便维持由机械压迫力逆着反作用力而施加的预定的净压迫力的量。
方法600还可以包括步骤602和另一步骤604,在步骤602期间,检测界标位置,在步骤604中,依据检测到的界标位置来确定指示目标位置的定位数据。
方法600可以额外地包括步骤614,在其中测量反作用力的量,并且提供指示由外部对象所施加的反作用力的当前量的反作用力信号。
在实施例中,包含调整机械压迫力的压迫力的量的方法600的步骤612包括步骤612.1、步骤612.2和步骤612.3,在步骤612.1中,在力控制单元处接收反作用力信号,在步骤612.2中,使用接收到的反作用力信号和预定的净压迫力的量,确定要被施加以用于实现或维持预定的净压迫力的量的目标压迫力的量,在步骤612.3中,力控制信号被生成并且被提供给力致动单元,并且其中,所述目标压迫力的量响应于接收到所述力控制信号而被施加。
总体而言,提出了一种超声探头定位系统,所述超声探头定位系统包括定位单元和定位控制单元,所述定位单元用于保持超声探头单元,并且用于移动所述超声探头单元并且将其定位在目标位置处,所述定位控制单元被配置为提供指示建立所述超声探头单元与外部对象的机械接触的目标位置的目标定位数据,并且在将所述超声探头移动并且定位在所述目标位置处时控制所述机械定位单元。所述定位单元包括力致动单元,所述力致动单元被配置为响应于反作用力的量的变化而调整被施加在所述对象上的机械压迫力的压迫力的量,以便维持由所述机械压迫力逆着所述反作用力而施加的预定的净压迫力的量。
在权利要求书中,“包括”一词不排除其他元件或步骤,并且词语“一”或“一个”不排除多个。
单个步骤或其他单元可以实现在权利要求中所记载的若干项的功能。尽管在互不相同的从属权利要求中记载的特定措施,但是这并不指示不能够有效地使用这些措施的组合。
权利要求中的任何附图标记都不应当被解释为对范围的限制。
净力被定义为作用在对象上的个体力的矢量和。术语净压迫力在本申请的背景下用于表达作用在超声探头单元上的个体力的和导致将恒定压力施加在外部对象上的净力,机械接触要被建立到所述外部对象并且由超声探头单元噪在超声探头定位系统的操作期间维持。
- 超声探头定位系统
- 医用超声探头相对于检查部位的三维空间定位系统及方法