计算机程序、模拟方法和模拟装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及根据具有线圈的电磁部件的分析模型对该电磁部件的动态行为(dynamic behavior)进行模拟的计算机程序、模拟方法和模拟装置。
背景技术
对电机的动态行为进行模拟的模拟装置已被利用于电机和驱动电路的开发。为了详细且正确地对电机的行为(behavior)进行模拟,将使用通过磁场分析得到的特性对电机的行为进行模拟的电机行为模拟器和对电机的驱动电路的动作进行模拟的驱动电路模拟器进行耦合。在耦合模拟中,在与时间序列的各时点对应的各模拟步骤中,驱动电路模拟器调用电机行为模拟器使其对电机的行为详细地进行模拟,并使用该模拟结果对驱动电路的行为进行模拟。
电机行为模拟器通过分析模型的磁场分析,预先创建表现与驱动状态相应的交链磁通等特性的LUT(Lookup table)并存储,所述分析模型表现具有多个线圈、定子和转子的电机的形状和电磁特性。
电机行为模拟器参照通过磁场分析得到的LUT对电机的行为进行模拟。
电机例如为星型接线的三相永磁电机。在这种情况下,电机行为模拟器通过求解由下述式(1)~(3)表示的电压方程,算出流到电机各线圈的电流,对电机的行为进行模拟。
【数1】
其中:
V
V
R表示线圈的电阻值;
I
Ψ
θ表示转子的机械角度。
另外,在中性点上,下述式(4)所示的电流守恒定律成立。
【数2】
I
交链磁通Ψ是电流和转子的机械角度的函数,因此,在求解上述式(1)~(3)表示的非线性方程时,一般来说需要牛顿-拉弗森方法等迭代计算(例如非专利文献1)。
上述迭代计算在对具有线圈的电磁部件的行为进行模拟的情况下也会成为问题。
先行技术文献
【非专利文献】
【非专利文献1】Hiroyuki Kaimori,Kan Akatsu,Behavior Modeling ofPermanent Magnet Synchronous Motors Using Flux Linkages for Coupling withCircuit Simulation,IEEJ Journal of Industry Applications,日本国,一般社团法人电气学会,2018年7卷1号,p.56-63
发明内容
发明要解决的课题
现有的手法中,如上所述,存在为了求解电压方程需要迭代计算这一问题。
本发明的目的在于,提供无需进行迭代计算就能求解非线性电压方程对电磁部件的动态行为进行模拟的计算机程序、模拟方法和模拟装置。
用于解决课题的手段
本发明的计算机程序,用于使计算机执行根据具有线圈的电磁部件的分析模型对多个时点的每一个上的该电磁部件的行为进行模拟的处理,所述计算机程序使所述计算机执行下述处理:创建查找表,该查找表使通过基于所述分析模型的磁场分析得到的、所述线圈上的交链磁通、所述线圈的电感、流到所述线圈的电流相关联;使用在上次和上上次模拟步骤中算出的流到所述线圈的电流参照所述查找表,对所述电磁部件的行为进行模拟。
本发明的模拟方法,计算机执行根据具有线圈的电磁部件的分析模型对多个时点的每一个上的该电磁部件的行为进行模拟的处理,所述计算机执行下述处理:创建查找表,该查找表使通过基于所述分析模型的磁场分析得到的、所述线圈上的交链磁通、所述线圈的电感、流到所述线圈的电流相关联;使用在上次和上上次模拟步骤中算出的流到所述线圈的电流参照所述查找表,对所述电磁部件的行为进行模拟。
本发明的模拟装置,包括根据具有线圈的电磁部件的分析模型对多个时点的每一个上的该电磁部件的行为进行模拟的运算部,所述运算部创建查找表,该查找表使通过基于所述分析模型的磁场分析得到的、所述线圈上的交链磁通、所述线圈的电感、流到所述线圈的电流相关联;所述运算部使用在上次和上上次模拟步骤中算出的流到所述线圈的电流参照所述查找表,对所述电磁部件的行为进行模拟。
发明的效果
根据本发明,无需进行迭代计算,就能求解非线性电压方程对电磁部件的动态行为进行模拟。
附图说明
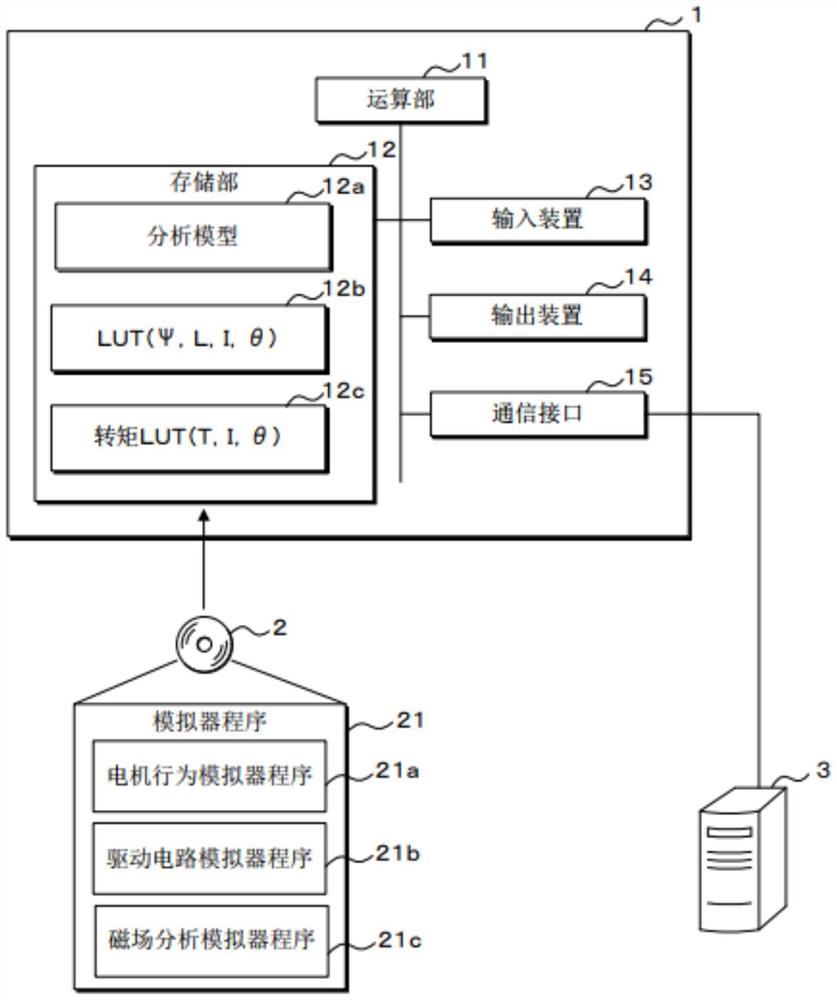
图1是表示本发明实施方式1的模拟装置的结构的框图。
图2是表示从旋转轴方向观察到的电机的示意图。
图3是表示电机的电路结构的示意图。
图4是表示模拟装置执行的耦合分析的概要的概念图。
图5是表示涉及LUT的创建的运算部的处理顺序的流程图。
图6是表示涉及耦合分析的运算部的处理顺序的流程图。
图7是表示涉及实施方式1的电机行为模拟的运算部的处理顺序的流程图。
图8A是表示实施方式1的模拟装置的作用效果的、表示相电流的模拟结果的曲线图。
图8B是表示实施方式1的模拟装置的作用效果的、表示相电流的模拟结果的曲线图。
图9A是实施方式1的模拟装置的作用效果的、表示交链磁通的模拟结果的曲线图。
图9B是实施方式1的模拟装置的作用效果的、表示交链磁通的模拟结果的曲线图。
图10A是表示实施方式1的模拟装置的作用效果的、表示感应电压的模拟结果的曲线图。
图10B是表示实施方式1的模拟装置的作用效果的、表示感应电压的模拟结果的曲线图。
图11A是表示实施方式1的模拟装置的作用效果的、表示中性点电位的模拟结果的曲线图。
图11B是表示实施方式1的模拟装置的作用效果的、表示中性点电位的模拟结果的曲线图。
具体实施方式
以下,基于表示本发明实施方式的附图详述本发明。
(实施方式1)
图1是表示本发明实施方式1的模拟装置1的结构的框图。图中1为本发明实施方式的模拟装置1。模拟装置1是包括例如CPU(Central Processing Unit)等运算部11的计算机,存储部12通过总线连接到运算部11。存储部12例如包括非易失性存储器和易失性存储器。非易失性存储器例如为EEPROM(Electrically Erasable Programmable ROM)等ROM。非易失性存储器中存储有计算机初始动作所需的控制程序和本实施方式的模拟器程序21。模拟器程序21例如包含电机行为模拟器程序(计算机程序)21a、驱动电路模拟器程序21b、磁场分析模拟器程序21c等。运算部11通过运行模拟器程序21,作为电机行为模拟器、驱动电路模拟器、磁场分析模拟器发挥机能,其中,电机行为模拟器对多个时点的每一个上的电机4(图2参照)的行为进行模拟,驱动电路模拟器对驱动电机4的驱动电路的行为进行模拟,磁场分析模拟器通过有限元法、边界元法等磁场分析对电机4的行为进行磁场分析。易失性存储器例如为DRAM(Dynamic RAM)、SRAM(Static RAM)等RAM,临时存储运算部11进行运算处理时从非易失性存储器读出的控制程序、由于模拟器程序21或运算部11的运算处理生成的各种数据。
另外,存储部12存储有分析模型12a、驱动电机4的驱动电路模型等,其中,分析模型12a表现构成电机4的多个线圈42、定子41和转子43(参照图2)的二维或三维形状以及电磁特性。
图2是表示从旋转轴方向观察到的电机4的示意图,图3是表示电机4的电路结构的示意图。作为模拟对象的电机4例如为三相永磁同步电机。图2所示的电机4为8极48槽的内置式永磁同步电机(PMSM:Permanent Magnet Synchronous Motor)。电机4包括产生场磁通的U相线圈42u、V相线圈42v和W相线圈42w在圆周方向等间隔配置的圆筒状的定子41、在该定子41的内径侧同心圆状配置的转子43。各线圈42例如如图3所示采用星型接线。图3中,Tn为中性点。Tu、Tv、Tw为向U相线圈42u、V相线圈42v和W相线圈42w施加电压的端子。转子43呈圆柱状,包括多对永久磁铁43a。此外,极数、槽数和线圈42的数不限于此。分析模型12a包含例如表现构成电机4的多个线圈42、定子41和转子43的形状的三维CAD数据等三维形状模型、构成三维形状模型的各部分的材料特性等。作为材料特性,可以列举磁化特性、电特性、机械特性、热特性、铁损特性等。电特性为电导率、相对介电常数等。
作为模拟对象的驱动电路例如由驱动器和逆变器构成。存储部12存储有表现构成所述驱动器和逆变器的多个电路元件和各电路元件的连接状态以及特性的驱动电路模型。
另外,存储部12存储LUT12b和转矩LUT12c作为用于对电机4的动态行为进行模拟的特性数据库。各特性数据库在对电机4的行为进行模拟之前的阶段被创建。LUT12b和转矩LUT12c将在后面详述。
作为存储部12,也可以包括硬盘驱动器、固态驱动器等可读出的磁盘驱动器和可从便携式的记录介质2读出数据的CD-ROM驱动器等装置。本实施方式的模拟器程序21或电机行为模拟器程序21a以可由计算机读取的方式记录在作为便携式介质的CD(CompactDisc)-ROM、DVD(Digital Versatile Disc)-ROM、BD(Blu-ray Disc)(注册商标)等记录介质2中。此外,光盘是记录介质2的一个例子,也可以将模拟器程序21或电机行为模拟器程序21a以可由计算机读取的方式记录在软盘、磁光盘、外置硬盘、半导体存储器等中。运算部11从记录介质2读出模拟器程序21或电机行为模拟器程序21a,将其存储在硬盘驱动器、固态驱动器等中。运算部11通过运行记录在记录介质2中的模拟器程序21或存储部12存储的模拟器程序21,使计算机作为模拟装置1发挥机能。
另外,模拟装置1如图1所示包括键盘或鼠标等输入装置13、液晶显示器或CRT显示器等输出装置14,受理数据输入等来自使用者的操作。
还可以是如下方式:模拟装置1包括通信接口15,从连接到通信接口15的外部的服务器计算机3下载本发明的模拟器程序21或电机行为模拟器程序21a,用运算部11执行处理。
图4是表示模拟装置1执行的耦合分析的概要的概念图。首先,模拟装置1在对电机4的行为进行模拟之前,通过基于有限元法模型等分析模型12a的磁场分析算出电机4的各种特性。例如,运算部11创建使总磁通Ψ(以下简称为交链磁通)、各线圈42的电感L、流到各线圈42的电流I、转子43的机械角度θ相对应的LUT(Ψ,L,I,θ)12b等作为电机4的特性。上述总磁通Ψ为转子43的永久磁铁43a的交链磁通成分与相电流的交链磁通成分的总合。电感L包含各线圈42的自感和各线圈42间的互感。另外,创建使转子43上形成的转矩T、流到各线圈42的电流I、转子43的机械角度θ相对应的转矩LUT12c。
然后,模拟装置1使电机行为模拟器和驱动电路模拟器耦合,对电机4的动态行为进行模拟。驱动电路模拟器将施加到电机4的各线圈42的端子Tu、Tv、Tw上的电压[V]=[Vu,Vv,Vw]和转子43的机械角度向电机行为模拟器送出。电机行为模拟器使用电压[V]和转子43的机械角度等,参照LUT12b和转矩LUT12c,求出各线圈42的电流[I]=[Iu,Iv,Iw]和电机4的转矩,将其模拟结果送回驱动电路模拟器。以下,通过反复执行同样的处理,能够对电机4的动态行为进行模拟。
以下,作为本实施方式的模拟方法,对LUT12b的创建顺序、电机4的行为模拟顺序依次进行说明。
图5是表示涉及LUT12b的创建的运算部11的处理顺序的流程图。模拟装置1的运算部11按照存储部12存储的电机行为模拟器程序21a执行以下的处理。运算部11首先通过输入装置13受理对作为模拟对象的电机4的分析模型12a和驱动电路模型的选择、其它各种设定(步骤S11)。
接下来,运算部11一边改变表示驱动状态的参数即各线圈42上的电流和转子43的机械角度的值,一边执行基于有限元法的磁场分析(步骤S12)。此外,在改变各线圈42上的电流时,设定流到各线圈42的电流以符合电流守恒定律。在有限元法中,将电机4的三维形状模型分割为多个单元。例如,运算部11将电机4的三维形状模型分割为多个四面体单元、六面体单元、四棱锥单元、三棱柱单元等。运算部11通过由麦克斯韦方程组得到的多元一次方程组在特定的边界条件例如狄利克雷边界条件、诺伊曼边界条件下进行数值计算,算出各单元的磁矢势。由磁矢势可得到电机4的各部分的磁场或磁通密度。磁场或磁通密度是用于算出电流、转矩等的基本信息。此外,准静态磁场由麦克斯韦方程组描述。
接下来,运算部11根据步骤S12的磁场分析结果算出与各线圈42的电流和转子43的位置相应的各线圈42上的交链磁通(步骤S13)。另外,运算部11算出各线圈42的自感和互感(步骤S14)。
这里算出的自感和互感为微分电感,由下述式(5)表示。以下简称为自感和互感。
其中:
L表示微分电感(自感和互感);
Ψ表示各线圈42上的交链磁通;
I表示流到各线圈42的电流;
ΔI表示电流的微小变化。
此外,如果是三相线圈的话,上述微分电感按各线圈42的交链磁通和微小变化的各线圈42的电流求得,用3×3的电感矩阵表示。3×3=9个矩阵元素为:
接下来,运算部11基于步骤S12的磁场分析结果,根据各线圈42的电流和转子43的位置算出作用于转子43的电磁力,算出作用于该转子43的转矩(步骤S15)。运算部11使用例如节点力法等手法算出作用于转子43的电磁力。
接下来,运算部11根据步骤S12的磁场分析结果创建LUT12b(步骤S16)。所述LUT12b中,对应地存储有各线圈上的交链磁通、各线圈42的自感和互感、流到各线圈42的电流、以及转子43的机械角度。
接下来,运算部11创建转矩LUT12c(步骤S17),结束处理。所述转矩LUT12c中,对应地存储有在步骤S15中算出的转矩、流到各线圈42的电流、转子43的机械角度。
这里,将LUT12b和转矩LUT12c作为独立的表进行了说明,但也可以将这些表用一个表构成。
图6是表示涉及耦合分析的运算部11的处理顺序的流程图。运算部11设定施加到线圈42的电压、电流、转子43的位置等初始值(步骤S31)。
接下来,运算部11根据上次模拟步骤中算出的线圈42的电流和作用于转子43的转矩,在接下来的模拟步骤中算出施加到线圈42的电压和转子43的机械角度(步骤S32)。步骤S32的处理由驱动电路模拟器执行(参照图4),将作为模拟结果的电压[V]=[Vu,Vv,Vw]和转子43的机械角度赋予电机行为模拟器。
接下来,运算部11根据施加到电机4的电压、在上次及以前的模拟步骤中算出的各线圈42的电流、各线圈42上的交链磁通、转子43的位置等对电机4的行为进行模拟,算出流到各线圈42的电流、转子43上形成的转矩(步骤S33)。步骤S33的处理由电机行为模拟器执行(参照图4),作为模拟结果的线圈42的电流[I]=[Iu,Iv,Iw]和转子43上形成的转矩向驱动电路模拟器送出。步骤S33的详细处理将在后面描述。
接下来,运算部11判定是否满足模拟的结束条件(步骤S34)。例如,在执行了相当于规定的实际时间的规定次数的模拟步骤的情况下,运算部11结束模拟。在判定为不满足模拟的结束条件的情况下(步骤S34:否),运算部11将处理返回步骤S32,反复执行步骤S32和步骤S33的处理。在判定为满足了模拟的结束条件的情况下(步骤S34:是),运算部11结束处理。
以下,在详细说明步骤S33中的运算部11的处理顺序之前,说明根据施加到各线圈42的电压算出流到各线圈42的电流和中性点的电位的方法理论。
如图3所示的星型接线电路的电压方程可由上述式(1)~(3)表示。另外,在中性点Tn,上述式(4)所示的电流守恒定律成立。
着眼于U相线圈42u的电压方程。将上述式(1)表示的该电压方程的时间微分置换为时间差Δt,则有下述式(6)。
【数3】
其中:
上标(n)表示是第n模拟步骤中的值;
θ
Δt表示模拟步骤之间的时间。
这里,交链磁通Ψ依存于作为未知数的电流I,考虑使用电流I将其显式表示。由于电流引起的交链磁通成分能用微分电感和电流表述,所以上述式(6)中的交链磁通的时间微分成分能够通过分离电流引起的交链磁通成分表示为下述式(7)。
【数4】
其中:
上述式(7)等号右边的第二项和第三项表示由转子43的旋转等、电流变化以外的原因引起的电压。该第二项和第三项进一步用前面的模拟步骤中的值近似的话,上述式(7)能由下述式(8)表示。
【数5】
将上述式(8)代入上述式(6),式(8)变为下述式(9)。
【数6】
在上述式(9)的等号两边乘以时间Δt,将作为未知数的电流I和中性点Tn上的电位Vn移项到等号左边,将作为已知量的项移项到等号右边,则式(9)变为下述式(10)。
【数7】
与U相线圈42u同样,由上述式(2)表示的V相线圈42v的电压方程由下述式(11)表示。
【数8】
其中:
与U相线圈42u同样,上述式(3)表示的W相线圈42w的电压方程由下述式(12)表示。
【数9】
其中:
将上述式(10)、(11)、(12)与上述式(4)的电流守恒式一起用矩阵形式表述,则有下述式(13)。
【数10】
上述式(13)中,电感和交链磁通能够通过以电流I=(Iu,Iv,Iw)和转子43的机械角度θ为关键字参照LUT12b读出。按照上述式(13),通过使用上次和上上次模拟步骤(第(n-1)步骤和第(n-2)步骤)中的信息,无需迭代计算,就能够算出这次模拟步骤(第n步骤)中的、流到各线圈42的电流和中性点Tn上的电位。
图7是表示涉及实施方式1的电机行为模拟的运算部11的处理顺序的流程图。以下,说明第n步骤中的步骤S33的处理内容。N取3以上的整数。运算部11从驱动电路模拟器获得施加到各线圈42的电压和转子43的机械角度(步骤S51)。例如,在驱动电路模拟器将模拟结果作为文件输出的结构中,运算部11从该文件读出各线圈42的施加电压和转子43的机械角度。
运算部11以第(n-1)模拟步骤中的各线圈42的电流、第n模拟步骤中的转子43的机械角度为关键字,参照LUT12b,读出各线圈42的自感和互感(步骤S52)。另外,运算部11以第(n-2)模拟步骤中的各线圈42的电流、第(n-1)模拟步骤中的转子43的机械角度为关键字,参照LUT12b,读出各线圈42的自感和互感(步骤S53)。
接下来,运算部11以第(n-1)模拟步骤中的各线圈42的电流、第n模拟步骤中的转子43的机械角度为关键字,参照LUT12b,读出各线圈42上的交链磁通(步骤S54)。另外,运算部11以第(n-2)模拟步骤中的各线圈42的电流、第(n-1)模拟步骤中的转子43的机械角度为关键字,参照LUT12b,读出各线圈42上的交链磁通(步骤S55)。
为了便于说明,按步骤S52~步骤S55的顺序将各步骤分开进行了说明,但处理的顺序没有特别限定。也可以同时执行步骤S52和步骤S54。还可以同时执行步骤S53和步骤S55。
运算部11根据施加到各线圈42的电压和步骤S52~步骤S55中读出的电感和交链磁通,通过上述式(13)算出第n模拟步骤中的流到各线圈42的电流和中性点Tn的电位(步骤S56)。
接下来,运算部11以步骤S56中通过计算得到的各线圈42的电流和转子43的机械角度为关键字,从转矩LUT12c读出作用于转子43的转矩(步骤S57)。
然后,运算部11将步骤S56中通过计算得到的各线圈42的电流和步骤S57中读出的转矩向驱动电路模拟器输出(步骤S58),并结束处理。
对这样构成的模拟装置1、模拟方法和模拟器程序21的作用效果进行说明。使用具有如图2所示形状的8极48槽的内置式永磁同步电机,进行了用于表示作用效果的实际模拟。定子41的槽中分布式缠绕有线圈42。
图8A和图8B、图9A和图9B、图10A和图10B、以及图11A和图11B分别是表示实施方式1的模拟装置1的作用效果的、表示相电流、交链磁通、感应电压和中性点电位的模拟结果的曲线图。图8A、图9A、图10A、图11A表示使用本实施方式1的模拟装置1对电机4的行为进行了模拟的运算结果,图8B、图9B、图10B、图11B表示通过使用了有限元法的磁场分析对电机4的行为进行模拟得到的运算结果。横轴表示时间。图8A和图8B所示的曲线图的纵轴表示各线圈42上的电流,图9A和图9B所示的曲线图的纵轴表示各线圈42上的交链磁通,图10A和图10B所示的曲线图的纵轴表示各线圈42上的感应电压,图11A和图11B所示的曲线图的纵轴表示中性点电位。
如图8A和图8B~图11A和图11B所示,各线圈42的相电流、交链磁通、感应电压和中性点电位被精度良好地再现。
如上所述,按照本实施方式1的模拟装置1、模拟方法和模拟器程序21,无需进行迭代计算,就能求解非线性电压方程对电机4的动态行为进行模拟。
另外,如图8A和图8B~图11A和图11B所示,得到了与作为精确解的磁场分析的运算结果大致相同的模拟结果,能够精度良好地对电机4的行为进行模拟。
本实施方式中,说明了作为动子旋转的旋转机的电机4,但通过对作为动子直线运动的线性机的电机4应用本发明,也能对电机4的动态行为进行模拟。仅仅是分析模型12a的形状不同,能够以同样的处理顺序对线性机的行为进行模拟。
另外,将动子直线移动或旋转移动的对象作为解析对象进行了说明,但动子的移动方式不做特别限定,对于动子振动的电机4、动子直线移动的直线电机、螺线管致动器等也能适用本发明。另外,对于感应机也能适用本发明。
本发明的适用对象不限于具有动子的电机的模拟,对于具有多个线圈的任意电磁部件也能适用本发明。例如,在对变压器、非接触充电器等静态器的行为进行模拟的情况下也能适用本发明。
另外,本实施方式中,说明了从驱动电路模拟器向电机行为模拟器送出电压,并从电机行为模拟器向驱动模拟器送回电流和转矩的例子,但在各模拟器间交换的物理量不限于此,要交换的物理量只要适当地选择即可。另外,也可以构成为交换表示电机4或发电机的状态的物理常数。
例如,也可以构成为从驱动电路模拟器向电机行为模拟器送出电流,从电机行为模拟器向驱动模拟器送回电压。在这种情况下,电机行为模拟器以电流为已知量、以各线圈42的电压为未知量,求解上述式(13),算出各线圈42上产生的电压,将算出的电压送回驱动电路模拟器。
本实施方式1中,作为使流到各线圈42的电流、转子43的机械角度、各线圈42上的交链磁通、各线圈42的电感相对应的信息说明了LUT12b,但也可以使用在输入了各线圈的电流和转子43的机械角度的情况下输出各线圈42的自感和互感的第一LUT、和在输入了各线圈的电流和转子43的机械角度的情况下输出各线圈42上的交链磁通的第二LUT。
另外,本实施方式1中,主要说明了星型接线的电机4的行为模拟,但本发明能适用于任意的电路,接线方式没有特别的限定,在对三角接线、其它任意接线方式的电机4的行为进行模拟的情况下也能适用本发明。三角接线的情况下,基本的思路与星型接线的情况相同,电压方程由下述式(14)表示。以与上述实施方式1同样的顺序求解下述式(14),由此能够对电机4的行为进行模拟。
【数11】
另外,不仅是正常的电路,对发生了断线的电路中的电机4的行为也能进行模拟。例如,像W相断线从而W相失电的情况下,设Iw=0,求解上述式(13)或(14),由此能够对断线状态下的电机4的行为进行模拟。
(实施方式2)
实施方式2的模拟装置1、模拟方法和模拟器程序21对具有定子和动子的χ相电机的行为进行模拟,这一点与实施方式1不同,因此,以下主要说明上述区别。χ是4以上的自然数。另外,实施方式2中,动子不限于转子43。而且,各线圈的电阻值未必相同。其它的结构和作用效果与实施方式1相同,因此,在对应的部位标注同样的附图标记,省略详细说明。
基于与实施方式1同样的思路,χ相的电压方程可如下述式(15)表示。
【数12】
其中:
上标(n)表示是第n模拟步骤中的值;
(R)
1=(1,1...1)
i,j:1,2,…,x
x表示电机的相数;
R
Δt表示模拟步骤之间的时间;
δ
θ
Ψ
LUT12b是使流到χ相的各线圈42的电流、动子的位置、各线圈42的自感和互感、各线圈42上的交链磁通相对应的表。
运算部11与实施方式1同样,以第(n-1)模拟步骤中的各线圈42的电流、第n模拟步骤中的动子的机械角度为关键字,参照LUT12b,读出各线圈42的自感和互感以及各线圈42上的交链磁通。另外,运算部11以第(n-2)模拟步骤中的各线圈42的电流、第(n-1)模拟步骤中的转子43的机械角度为关键字,参照LUT12b,读出各线圈42的自感和互感以及各线圈42上的交链磁通。
运算部11根据施加到各线圈42的电压和通过上述处理读出的电感和交链磁通,由上述式(15)算出第n模拟步骤中的流到各线圈42的电流和中性点的电位。
以下,同样地,运算部11执行下述处理:以通过计算得到的各线圈42的电流和转子43的机械角度为关键字,从转矩LUT12c读出作用于转子43的转矩,将通过计算得到的各线圈42的电流和读出的转矩向驱动电路模拟器输出。
如上所述,按照本实施方式2的模拟装置1、模拟方法和模拟器程序21,与实施方式1同样,无需进行迭代计算,就能求解非线性电压方程对电机4的动态行为进行模拟。
实施方式2以星型接线的χ相电机为一个例子进行了说明,但像实施方式1中说明的那样,对于χ相电机的接线方式也不做特别的限定。
(实施方式3)
实施方式3的模拟装置1、模拟方法和模拟器程序21对具有χ个线圈42的变压器的行为进行模拟,这一点与实施方式1或实施方式2不同,因此,以下主要说明上述区别。χ为1以上的自然数。χ个线圈42例如为一次线圈。线圈42为多个的情况下,各线圈42的电阻值未必相同。其它的结构和作用效果与实施方式1相同,因此,在对应的部位标注同样的附图标记,省略详细说明。
线圈42的电压方程与实施方式2的上述式(15)相同,只要考虑对机械角度θ没有依存性的式子即可。另外,如果是不存在中性点的变压器,那么考虑忽略了中性点电位的式子即可。
运算部11的处理顺序,除了不存在动子、不计算转矩之外,与实施方式2相同。
如上所述,按照本实施方式3的模拟装置1、模拟方法和模拟器程序21,与实施方式1同样,无需进行迭代计算,就能求解非线性电压方程对变压器的动态行为进行模拟。
应该认为本次公开的实施方式中各点均为例示,并不是限制性的。本发明的范围并非由上述意思而是由权利要求书所示,包含与权利要求等同的意思和在其范围内的所有变更。
附图标记说明
1 模拟装置
2 记录介质
3 服务器计算机
4 电机
11 运算部
12 存储部
12a 分析模型
12b LUT
12c 转矩LUT
13 输入装置
14 输出装置
15 通信接口
21 模拟器程序
21a 电机行为模拟器程序
21b 驱动电路模拟器程序
21c 磁场分析模拟器程序
41 定子
42 线圈
42u U相线圈
42v V相线圈
42w W相线圈
43 转子
Tn 中性点
- 人体模拟装置、控制人体模拟装置的方法以及计算机程序
- 计算机程序、模拟方法和模拟装置