曲臂举升无倒车两层机械立体车库
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及机械立体车库行业。
背景技术
在机械立体车库行业中,两层的机械立体库的形式很多,但是绝大多数都存有很大的隐患或者说是很大的缺陷,机械立体车库与提升机械紧密相关,在起重行业里就有“起重臂下严禁站人”这样的警示语,而今天的大多数两层的机械立体库中多数都是在取地面一层的车或者要将车放入地面一层的车位时,都要让驾驶者进入到该车位里,这时的地面一层车位的顶部上方就是一台车,这样的隐患是很危险不安全的,由于驾驶者无论存车还是取车都要进入到第一层的车位里而置身于重物之下,这里尽管各种车库都号称采用了特别的处理,可以防止坠落,但是这样的给人压抑的感觉让人很不舒服,一旦出现意外都会造成驾驶者极大的损失,再有多数的两层机械立体车库对驾驶者的入库感受理解是很不够的,或者说是无法做到尽可能的满足驾驶者倒车入库的便捷和安全。在一个空间受到限制的车位,要安全的存车和取车也是多数两层机械立体车库没有做到的,而本发明的“曲臂举升无倒车两层机械立体车库”就很好的解决了这两点,使用本发明可以让驾驶者无论是存车还是取车都不用再钻入到车位里,再也不用冒着头顶重物的不安全风险了,无论是取车还是存车,都不用再小心翼翼的倒车,只需往前开就可以了,完全做到安全舒心快捷。
发明内容
本发明的“曲臂举升无倒车两层机械立体车库”打破一般意义上的两层机械立体车库的设计,采用了上下两层的载车板都可以连同车辆一起自动移动到库外的方式,将该载车板和车辆一起放置在库外的行进路面上,将旋转车板连同车一起旋转90度,使车辆与行进路线方向平行,彻底的避免了驾驶者倒车的烦恼,同时使驾驶者再也不用钻进车位,冒着“起重臂下严禁站人”的风险和不适了。
上层车位是由上层载车板3、上层旋转板17、前端爬坡板18、后端爬坡板19组成,上层车位的移动和举升是由小臂4、后侧小臂4a、大臂2、后侧大臂2a、动力小臂9、后侧动力小臂9a、动力大臂6、后侧动力大臂6a组成的平行四边形的四杆机构来完成,该套四杆机构在小臂油缸10、后小臂油缸10a、大臂油缸13、后大臂油缸15的配合动作下,使上层车位从两层立体库上部最后端水平移动到车库的最前端,然后保持上层载车板3始终平行地面的情况下放置在立体车库的正前方,然后上层旋转板17在动力驱动下旋转90度,使上层旋转板17与库外的行进路线平行,再根据车辆是驶入还是车辆驶出放下前端爬坡板18或者后端爬坡板19,完成车辆的直行驶入或直行驶出,收回上层车位前,两个爬坡板18和19分别收回挡住车辆的前后轮,再在小臂油缸10、后小臂油缸10a、大臂油缸13、后大臂油缸15的配合动作下,小臂4、后侧小臂4a、大臂2、后侧大臂2a、动力小臂9、后侧动力小臂9a、动力大臂6、后侧动力大臂6a形成曲臂举升的姿态,并将上层车位拉回到两层立体车库最后端。
地面层车位是由运载车板21、下层旋转板14、地面前端爬坡板20、地面后端爬坡板22组成,运载车板21可以沿着车库大架1底部的轨道移动,地面层车位在驾驶者需要提车或存车时,运载车板21在动力驱动下从两层立体车库最后端沿车库大架1底部轨道向前端运行,直到运载车板21运行到两层立体车库的外面正前方的位置,下层旋转板14在动力驱动下旋转90度,使旋转板14与车辆行驶的路线平行,再根据车辆是驶入还是车辆驶出放下地面前端爬坡板20或者地面后端爬坡板22,完成车辆的直行驶入或直行驶出,在地面前端爬坡板20和地面后端爬坡板22分别收回挡住车辆的前后轮后,下层旋转板14在动力驱动下旋回90度之后运载车板21在动力驱动下从库外被拉回到两层立体车库内最后端的位置。
由于“曲臂举升无倒车两层机械立体车库”是依靠完全的将载车板移动到库外的方式来实现存车和取车这样的过程,体现了驾驶者安全第一,使驾驶者无需倒车,舒心驾驶这样人性化的设计理念。
附图说明
图1、图2、图3、图4是“曲臂举升无倒车两层机械立体车库”在各种运行状态下的三维示意图,图1a是库内上下都停放有车的三维示意图,图1b是上层停放的车被上层载车板3水平移动到车库前端时的三维示意图,图1c是车辆被上层载车板3平行的向下降落时的三维示意图,图1d是上层载车板3和车一起停放在地面时的三维示意图,图2a是上层旋转板17带着车辆一起旋转90度,使车辆与行驶路线平行状态的三维示意图,此时该车辆在前端爬坡板18放下即可直行驶离,图2b是后端爬坡板19放下后又有车辆直行入库三维示意图,图2c是前端爬坡板18、后端爬坡板19都收回挡住车辆前后轮后准备提升入库的三维示意图,图2d是车辆被曲臂举升时的三维示意图,图3a是图2d里的车辆被曲臂举升拉回到上层车位中的三维示意图,图3b是运载车板21在动力驱动下从地面层车位移动到库外的三维示意图,图3c是库里原来的车直行驶离,同时又有新车直行驶入的三维示意图,图4a是车辆驶入后地面前端爬坡板20和地面后端爬坡板22都收回挡住车辆的车轮时的三维示意图,图4b是车辆在下层旋转板14上一起旋回90度准备回地面层车位时的三维示意图,图4c是车辆在运载车板21上一起移动回立体车库地面层车位的三维示意图。
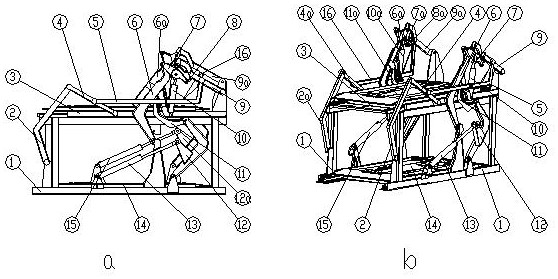
图5a是本立体车库的侧视图,图5b是该状态下的三维图,图6a是上层车位水平移动到车库最前端时的侧视图,图6b是该状态时的三维图,图7a是上层车位放置在车库前端地面上的侧视图,图7b是该状态下的三维图,图8a是上层车位的上层旋转板17在上层载车板3上旋转90度,前端爬坡板18和后端爬坡板19都打开放下时的俯视图,图8b是该状态下的三维图,图9a是上层车位在原位,下层车位移动到车库的前端处于库的外面时的侧视图,图9b是该状态下的三维图,图10a是仅仅留下地面层车位时运载车板21运行到车库最左端,下层旋转板14旋转90度,地面前端爬坡板20和地面后端爬坡板22都打开放下时的俯视图,图10b是该状态下的三维图。
附图中各零件的标记如下:1车库大架、2大臂、2a后侧大臂、3上层载车板、4小臂、4a后侧小臂、5联动杆、6动力大臂、6a后侧动力大臂、7小摆杆、7a后侧小摆杆、8连杆、8a后侧连杆、9动力小臂、9a后侧动力小臂、10小臂油缸、10a后小臂油缸、11长连杆、11a后侧长连杆、12大摆动杆、12a后侧大摆动杆、13大臂油缸、14下层旋转板、15后大臂油缸、16后侧联动杆、17上层旋转板、18前端爬坡板、19后端爬坡板、20地面前端爬坡板、21运载车板、22地面后端爬坡板。
具体实施方式
下面结合附图对本发明进行详细的阐述,图1、图2、图3、图4是为充分说明“曲臂举升无倒车两层机械立体车库”存取车的整个过程,特别对全过程中的每个特殊状态给出了三维示意,图1a中可以看到上下两个车位都有车的状态,图1b是上层车位水平移动到车库的最前端的位置,图1c是上层的车位在车库最前端向下放落时的状态,这个过程中车辆一直是保持与地面平行的,图1d是上层车位放置在车库最前端地面位置的状态,图2a是上层车位在上层载车板3放在地面上不动的情况下,上层旋转板17带着车辆一起旋转90度后的状态,从该图中可以看到,前端爬坡板18已经放下,后端爬坡板19仍然挡在后轮上,这时车辆可以向前直行驶离车库,图2b是又有车辆直行驶入车位的情况,从图中可以看到前端爬坡板18已经收回,作为阻挡车辆前行时的定位阻挡限制,后端爬坡板19是放下的状态,图2c是车辆已经停放完成,后端爬坡板19已经收回挡在车辆的后轮下缘,上层旋转板17已经旋回90度,做好了将该车辆曲柄举升的准备状态,图2d是车辆被曲臂举升时的状态,从图中可以看到车辆和地面一直保持水平的状态,同时该提升的状态是一直在车库的最前端进行的,图3a是图2d里所述的车辆被曲臂举升并拉回到上层车位时的状态,图3b是地面层车位里的车辆由运载车板21在动力驱动下沿车库大架1底部轨道被推送到车库前端的状态,图3c是前述刚推送出来的车辆直行驶离车位,地面前端爬坡板20已经收回放在可以阻挡车轮前行定位的位置上,地面后端爬坡板22是处于放下的状态,又有车辆直行驶入车位时的状态,图4a是车辆已经完全停放在下层旋转板17上,并且地面后端爬坡板22已经收回挡在车辆的后轮下缘,图4b是下层旋转板17旋回90度,使车辆完成准备入库,图4c是运载车板21在动力驱动下沿车库大架1底部轨道将车辆拉回车位中。
为更清楚的对本发明进行详细动作阐述,从图5~图10均移除了车辆。从图5中可以看到车库的静止状态下的侧视图和该状态下的三维图,从图5a中可以看到大臂2和动力大臂6两者呈现平行状态,小臂4和动力小臂9呈现平行状态,从图5b中可以看到后侧小臂4a与小臂4是完全一致的,后侧大臂2a和大臂2也是完全一致,在图5a中就投影完全重合在一起,这样作为后侧方面,后侧动力小臂9a和后侧小臂4a也是呈现平行状态,后侧动力大臂6a和后侧大臂2a也是呈现平行状态,在这里要指出的是后侧方的后侧动力大臂6a和后侧动力小臂9a相对正前面的对应机构向上(垂直方向)移动了一定的尺寸,这可以从图5a中看到。
从图5中可以看到大臂2一端铰接于车库大架1,一端与小臂4铰接,小臂4另一端与上层载车板3铰接,上层载车板3可在车库大架1上部的轨道里水平滑动,上层载车板3的尾端与动力小臂9铰接,动力小臂9另一端与动力大臂6铰接,动力大臂6的另一端与车库大架1铰接,联动杆5分别铰接于小臂4和动力小臂9的中间部位,从图5b可以看到,后侧大臂2a一端铰接与车库大架1,一端与后侧小臂4a铰接,后侧小臂4a另一端与上层载车板3铰接,上层载车板3的尾端与后侧动力小臂9a铰接,后侧动力小臂9a另一端与后侧动力大臂6a铰接,后侧动力大臂6a的另一端与车库大架1铰接,后侧联动杆16分别铰接于后侧小臂4a和后侧动力小臂9a的中间部位。
从图5可以看到,大臂油缸13一端铰接在车库大架1上,一端铰接在大摆杆12中部,大摆杆12一端铰接于车库大架1另一端与长连杆11铰接,长连杆11另一端铰接在动力大臂6的中部,从此可以看出大臂油缸13的伸缩就可以控制动力大臂6绕其与车库大架1的铰接点顺时针或反时针转动,小臂油缸10一端铰接在动力大臂6的中部,一端铰接在小摆杆7中部,小摆杆7则一端铰接在动力大臂6上,一端铰接在连杆8上,连杆8的另一端铰接在动力小臂9上,从此可以看出小臂油缸10的伸缩就可以控制动力小臂9和动力大臂6之间的夹角变化。
从图5a和图5b可以看到,后大臂油缸15一端铰接在车库大架1上,一端铰接在后侧大摆杆12a中部,后侧大摆杆12a一端铰接于车库大架1另一端与后侧长连杆11a铰接,后侧长连杆11a另一端铰接在后侧动力大臂6a的中部,从此可以看出后大臂油缸15的伸缩也是可以控制后侧动力大臂6a绕其与车库大架1的铰接点顺时针或反时针转动,后小臂油缸10a一端铰接在后侧动力大臂6a的中部,一端铰接在后侧小摆杆7a中部,后侧小摆杆7a则一端铰接在后侧动力大臂6a上,一端铰接在后侧连杆8a上,后侧连杆8a的另一端铰接在后侧动力小臂9上,从此可以看出后小臂油缸10a的伸缩也是可以控制后侧动力小臂9a和后侧动力大臂6a之间的夹角变化。
从图6a可以看到上层车位的上层载车板3沿车库大架1上部轨道水平移动到最前端时,这时大臂2和小臂4之间夹角约180度基本成一直线,动力小臂9和动力大臂6之间的夹角也是约180度,同时后侧动力小臂9a和后侧动力大臂6a之间的夹角也是约180度,从该图中可以看出,这三组臂之间也是形成了平行的关系,这种三组臂各个大小臂相互夹角约成180度,并且该三组相互之间也成平行的状态从图7a也能看出来,图7是上层车位放置在车库最前端的地面上的状态。
上层车位只有从立体车库的上层平行移动到车库的最前端并且放置在车库前端的地面上,才能实现将上层载车板3和上层旋转板17放置在库外,当它们被放置在立体车库外面的路面上时,实现直行驶入和直行驶出车库就变成很容易的事情了,而且这时驾驶人员始终是在库外,头顶无任何的物体,绝对的安全,
从图6和图7可以看到,当小臂油缸10处于伸出某位置不动时,可以将大臂2和小臂4看作一体成为四杆机构的一个杆,动力大臂6和动力小臂9看作一体成为四杆机构的另一个杆,而这样的两组杆呈现平行的状态,同时当后侧小臂油缸10a也处于伸出某位置不动时,就可将后侧大臂2a和后侧小臂4a看作一体成为四杆机构的一个杆,后侧动力大臂6a和后侧动力小臂9a看作一体成为四杆机构的另一个杆,而这样的两组杆也是呈现平行的状态,从图6、图7中可以看出,这样前后两侧的各两组杆和上层载车板3、车库大架1形成平行四边形的四杆机构,同时从图6a图7a中可以看出后侧动力大臂6a和后侧动力小臂9a相对动力大臂6和动力小臂9平行并且在垂直方向提高了一定的尺寸,而这样的四杆机构中,后侧大臂2和后侧小臂4a这个杆件与大臂2和小臂4这个杆件从图5a、图6a、图7a可以看到完全的一致重合,后侧动力大臂6a和后侧动力小臂9a高出动力大臂6和动力小臂9是在形成的这套平行四边形四杆机构时,因为从图5中可以看到大臂和小臂之间的夹角有锐角的时刻,当大臂和小臂之间夹角从180度到锐角变化时会出现大臂和小臂位置的不确定的情况,在此特别设计使后侧动力大臂6a和后侧动力小臂9a高出一些,保证该四杆机构动作的唯一确定性。
这套四杆机构的动作我们从图5开始分析,当大臂油缸13和后大臂油缸15收缩时,大摆杆12和后侧大摆杆12a则分别绕其与车库大架1的铰接点反时针动作,通过长连杆11和后侧长连杆11a使得动力大臂6和后侧动力大臂6a反时针方向动作,在此过程中,上层载车板3被车库大架1的上部轨道所约束只能在车库大架1上水平滑动,而小臂油缸10和后小臂油缸10a的伸缩不断的调整小臂和大臂之间的夹角,当上层载车板3水平移动过程中,小臂油缸10和后小臂油缸10a的不断外伸,在大臂油缸13、后大臂油缸15动作配合下使上层载车板3脱离车库大架1,这时的状态从图6就可以看到,上层载车板3已经完全移动到了车库的最前端了,这时小臂油缸10和后小臂油缸10a保持不动,大臂油缸13和后大臂油缸15收缩,直到上层载车板3降落到地面上,这时的状态可以从图7中看到上层载车板3完全放置在车库的最前端的正面了,从图8可以看到,上层载车板3上面的上层旋转板17旋转90度,使上层载车板3和上层旋转板17成垂直状,可以根据是车辆驶离车库还是有车辆驶入车库来决定放下前端爬坡板18还是后端爬坡板19,这两个爬坡板在收回来时都是挡在车辆的前后轮上的,起到阻挡车辆滑出的作用。当要收回上层车位时,上层旋转板17要旋回与上层载车板3一致,同时两爬坡板都收回到位,大臂油缸13和后大臂油缸15动作外伸,推动大摆杆12和后大摆杆12a顺时针动作,通过长连杆11和后侧长连杆11a使得动力大臂6和后侧动力大臂6a顺时针方向动作,一直将上层车位举升到使上层载车板3与车库大架1对齐,这从图6可以看到,小臂油缸10和后小臂油缸10a开始动作回缩,使小摆杆7和后侧小摆杆7a分别绕其与动力大臂6和后侧动力大臂6a的铰接点顺时针方向动作,通过连杆8和后侧连杆8a使得动力小臂9和后侧动力小臂9a拉着上层载车板3往右运动,插入车库大架1中,小臂油缸10和后侧小臂油缸10a继续动作,在车库大架的约束下,上层载车板3不断的向右水平移动,在小臂油缸10和后侧小臂油缸10a 与大臂油缸13和后大臂油缸15的共同作用下,上层载车板3被动力小臂9和后侧动力小臂9a拉回到车库最右端的位置,至此上层车位曲臂提升到位。
图9是地面层车位处于车库前端正前方的位置,图9a是此状态下的侧视图,图9b是该状态的三维图,在该图中,地面层车位的运载车板21在动力的推动下沿车库大架底部轨道,带着下层旋转车板14一起移动到车库前端正前方,完全处于车库的外面,这时无论是存车入库或者是提取车辆驶离都是很容易的了,图10是下层旋转板14旋转90度时的状态,从这里可以看到当下层旋转板14旋转90度后,如果是要提取车辆,就可以在动力驱动下放下地面前端爬坡板20,车辆就可以直行驶离车位,等车辆驶离后地面前端爬坡板20收拢回来以作为有车辆入库时的前进阻挡限位用,这时如有车辆入库,就可以在动力驱动下放下地面后端爬坡板22,要入库的车辆就可以直行驶入车位,之后地面后端爬坡板22收回来挡在车辆的后轮上,接着下层旋转板14旋回90度,使下层旋转板14与运载车板21对齐回到图9所示的状态,再由动力驱动拉着运载车板21沿着车库大架底部轨道从库外向右运动,直到运载车板21到达车库最里的位置,这样地面层车位也完成了一次存、取车入库的全过程。
以上仅为本发明的一个实例,对于本领域的技术人员来说,可以有各种更改和变化,凡在本发明的原理之内所作的任何修改,等同替换改进,均包含在本发明的保护范围内。
- 曲臂举升无倒车两层机械立体车库
- 无倒车升降横移全自动两层机械立体车库