一种基于云端的智能核桃运动模式识别方法及系统
文献发布时间:2023-06-19 09:43:16
【技术领域】
本发明涉及智能穿戴设备运动识别技术领域,具体涉及一种基于云端的智能核桃运动模式识别方法及系统。
【背景技术】
随着社会发展,我国人口老龄化情况日趋严重。随着人年龄的增加,其身体素质逐年下降,容易引发各种疾病,影响他们的日常生活。而在这些疾病中老年痴呆是十分常见的一种疾病。且随着年龄增大这种疾病发病的概率越高。现代医学研究表明,运动可以增强心血管功能,加强大脑的认知能力,延缓老年痴呆症的进展。考虑到老年人不宜做剧烈运动,轻巧灵活的运动更容易受老年人欢迎。研究人员提出手转核桃可以有效刺激手部穴位,帮助患者锻炼偏瘫侧的手臂神经和双臂的协调性,提高其手部功能和上肢功能的恢复效果。然而,目前市场上的文玩核桃功能单一,且无法定量计算使用者有效时间。并且随着年龄增长,老年人记忆衰退,不能有规律运动。
每次FFT变换只能对有限长度的时域数据进行变换,因此,需要对时域信号进行信号截断;即使是周期信号,如果截断的时间长度不是周期的整数倍。那,截取后的信号将会存在泄漏;为了将这个泄漏误差减少到最小程度需要使用加权函数,也叫窗函数,加窗主要是为了使时域信号似乎更好地满足FFT处理的周期性要求,减少泄漏。LOESS(locallyweighted regression)是一种用于局部回归分析的非参数方法,它主要是把样本划分成一个个小区间,对区间中的样本进行多项式拟合,不断重复这个过程得到在不同区间的加权回归曲线,最后再把这些回归曲线的中心连在一起合成完整的回归曲线。蓝牙低能耗(Bluetooth Low Energy,或称Bluetooth LE、BLE,旧商标Bluetooth Smart)也称低功耗蓝牙,是蓝牙技术联盟设计和销售的一种个人局域网技术,旨在用于医疗保健、运动健身、信标、安防、家庭娱乐等领域的新兴应用,相较经典蓝牙,低功耗蓝牙旨在保持同等通信范围的同时显著降低功耗和成本。MQTT(Message Queuing TelemetryTransport,消息队列遥测传输)是IBM开发的一个即时通讯协议,有可能成为物联网的重要组成部分,该协议支持所有平台,几乎可以把所有联网物品和外部连接起来,被用来当做传感器和致动器(比如通过Twitter让房屋联网)的通信协议。
本发明利用基于云端的信息采集处理技术,克服现有文玩核桃作为保健产品的不足,提出了一种智能核桃信息处理方法及系统。
【发明内容】
本发明的目的是,提供一种对智能核桃用户运动时间和状态进行有效评估、提醒用户有规律运动的运动模式识别方法。
为实现上述目的,本发明采取的技术方案是一种基于云端的智能核桃运动模式识别方法,包括以下步骤:
S601、利用智能核桃内部传感器实时采集用户运动数据,采集数据包括智能核桃三个坐标轴方向水平加速度和角加速度,从而构成六个维度的智能核桃运动数据;
S602、按照固定的时间频率,将六个维度的传感器数据分别转化为时间序列,对构建的时间序列进行平滑预处理,将处理后的时间序列按照一定的区间进行运动趋势提取;
S603、对三个坐标轴方向分别计算加速度和角加速度,进行智能核桃运动趋势相关性分析;
S604、以步骤S603计算的智能核桃运动趋势相关性结果构造三个坐标轴方向维度的相关系数特征;
S605、利用步骤S604构造的三个坐标轴方向维度的相关系数特征训练动作识别模型;
S606、利用训练好的动作识别模型对新采集用户运动数据进行智能核桃动作识别,将识别结果反馈至用户。
优选地,上述的一种基于云端的智能核桃运动模式识别方法,用户利用所述智能核桃内部加速度计和陀螺仪采集智能核桃三个坐标轴方向水平加速度数据和角加速度数据;上述智能核桃动作分为旋转状态模式和行走状态模式;上述旋转状态模式是指用户处于原地旋转智能核桃以及用户处于行走状态同时旋转智能核桃;上述行走状态模式是指用户处于行走状态,但是智能核桃在手中并未转动。
优选地,上述的一种基于云端的智能核桃运动模式识别方法步骤S606智能核桃动作识别具体包括以下步骤:
S801、对加速计和陀螺仪采集的加速度数据和角加速度数据进行三个坐标轴方向时间序列建模;
S802、以窗函数均值平滑对步骤S801构建的时间序列进行平滑,窗的宽度由运动状态识别频率决定;
S803、对步骤S802获取的平滑后时间序列基于LOESS算法进行分解,将各个坐标轴方向时间序列分解成趋势分量、周期分量和余项;
S804、计算同一坐标轴方向的加速度数据和角加速度数据,采用局部相关系数衡量某个时刻沿这个坐标轴方向的运动一致性;
S805、将步骤S804所计算的相关系数时间序列构建基于不同坐标轴方向的运动趋势三维相关特征序列;
S806、以步骤S805中三维相关特征序列为数据集构建分类器,分类器根据三维相关特征所表征的运动趋势相关性高低进行运动模式识别,当三维运动趋势强相关,则表示智能核桃处于旋转状态,当三维运动趋势弱相关,则表示智能核桃处于行走状态。
优选地,上述的一种基于云端的智能核桃运动模式识别方法,步骤S801以加速度计数据D表示三轴加速度,则加速度计时间序列用集合{D
优选地,上述步骤S806构建分类器进行智能核桃运动模式识别包括分类器模型训练过程,以及基于训练好的分类器对加速计和陀螺仪采集的加速度数据和角加速度数据进行实时识别过程。
优选地,上述的一种基于云端的智能核桃运动模式识别方法,采用支持向量机SVM,逻辑回归和决策树进行分类器模型训练。
本发明的再一目的是,提供一种对智能核桃用户运动时间和状态进行有效评估、提醒用户有规律运动的运动模式识别系统。
为实现上述目的,本发明采取的技术方案是一种基于云端的智能核桃运动模式识别系统,包括若干智能核桃、和上述若干智能核桃配对的手机以及云平台;上述智能核桃通过蓝牙和手机进行通讯,上述手机通过通讯链路和云平台进行通讯;上述智能核桃内置传感器用于采集用户运动数据传输至手机;上述手机用于接收运动数据,并将运动数据传输至云平台;上述云平台用于接收手机传输的运动数据,并存储、计算分析运动数据,反馈计算分析结果给手机;上述一种基于云端的智能核桃运动模式识别系统执行上述的一种基于云端的智能核桃运动模式识别方法。
优选地,上述智能核桃通过低功耗蓝牙协议和手机进行通信,上述手机采用消息队列遥测传输协议和云平台进行通信。
优选地,上述智能核桃内置传感器单元、处理器单元和信号指示单元;上述传感器单元采集用户运动数据,上述处理器单元将采集的运动数据传输至手机端。
优选地,上述智能核桃包括智能核桃外壳,传感器控制板两个部分;上述传感器控制板包括传感器单元、信号指示单元和处理器单元;上述智能核桃外壳和普通文玩核桃外壳大小和形态相似,上述智能核桃外壳有纹状凸起,握感同普通文玩核桃相同;上述智能核桃内部空心化,传感器控制板位于智能核桃的两个半球中间。
优选地,上述手机用于信息传输中继将采集的运动数据传输至云平台、用于给采集的运动数据标记时间信息、用于提供智能核桃动作识别服务、以及用于展示用户运动状态。
本发明有如下有益效果:利用运动传感器对智能核桃动作的数据进行实时采集,智能核桃内置芯片则将数据传输至云端;在云端,算法构建传感器数据的时间序列,并提取出不同坐标轴方向的运动趋势;根据运动趋势数据,计算同坐标轴方向的运动相关系数,并构建基于不同坐标轴方向的运动趋势相关序列特征;以运动趋势相关序列特征为算法模型的样本,进行模型训练,训练出能够识别智能核桃运动模式的模型;将这些模型运用至新采集的运动数据,计算用户在不同模式下的运动时间,对用户玩转智能核桃的时间进行统计分析,并将分析结果发送回智能手机,通过手机提醒用户有规律运动。
【附图说明】
图1是一种基于云端的智能核桃运动模式识别方法流程图。
图2是一种基于云端的智能核桃运动模式识别方法智能核桃旋转动作示意图。
图3是一种基于云端的智能核桃运动模式识别方法智能核桃行走状态示意图。
图4是一种基于云端的智能核桃运动模式识别方法智能核桃识别算法流程图。
图5是一种基于云端的智能核桃运动模式识别系统架构图。
图6是一种基于云端的智能核桃运动模式识别系统智能核桃控制板功能模块图。
图7是一种基于云端的智能核桃运动模式识别系统智能核桃透视图。
图8是一种基于云端的智能核桃运动模式识别系统手机应用功能模块图。
图9是一种基于云端的智能核桃运动模式识别系统分类模型和利用模型进行运动模式识别的流程图。
【具体实施方式】
下面结合实施例并参照附图对本发明作进一步描述。
在本发明中,服务器是在网络上提供、管理网络资源的一个计算机或设备,终端可指各种类型的装置,包括(但不限于)无线电话、蜂窝式电话、膝上型计算机、多媒体无线装置、无线通信个人计算机(PC)卡、个人数字助理(PDA)、外部或内部调制解调器等。客户端设备,即终端可为任何经由无线信道和/或经由有线信道(例如,光纤或同轴电缆)与服务器通信的数据装置。终端可具有多种名称,例如移动台、移动装置、移动单元,移动电话、远程站、远程终端机、远程单元、用户装置、用户设备、手持式装置等。不同终端可并入一个系统中。终端可为移动的或固定的,且可分散遍及一个通信网络。
实施例1
本实施例实现一种基于云端的智能核桃运动模式识别方法。
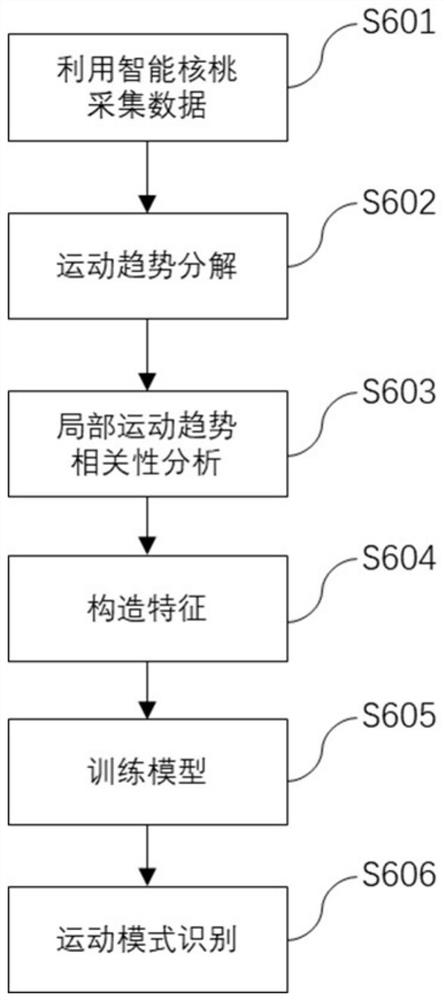
附图1是一种基于云端的智能核桃运动模式识别方法流程图,如附图1所示,本实施例一种基于云端的智能核桃运动模式识别方法,包括以下步骤:
S601、利用智能核桃内部传感器实时采集用户运动数据,采集数据包括智能核桃三个坐标轴方向水平加速度和角加速度,从而构成六个维度的智能核桃运动数据;
S602、按照固定的时间频率,将六个维度的传感器数据分别转化为时间序列,对构建的时间序列进行平滑预处理,将处理后的时间序列按照一定的区间进行运动趋势提取;
S603、对三个坐标轴方向分别计算加速度和角加速度,进行智能核桃运动趋势相关性分析;
S604、以步骤S603计算的智能核桃运动趋势相关性结果构造三个坐标轴方向维度的相关系数特征;
S605、利用步骤S604构造的三个坐标轴方向维度的相关系数特征训练动作识别模型;
S606、利用训练好的动作识别模型对新采集用户运动数据进行智能核桃动作识别,将识别结果反馈至用户。
优选地,上述的一种基于云端的智能核桃运动模式识别方法,用户利用所述智能核桃内部加速度计和陀螺仪采集智能核桃三个坐标轴方向水平加速度数据和角加速度数据;上述智能核桃动作分为旋转状态模式和行走状态模式。
附图2是一种基于云端的智能核桃运动模式识别方法智能核桃旋转动作示意图,如附图2所示,上述旋转状态模式是指用户处于原地旋转智能核桃以及用户处于行走状态同时旋转智能核桃。
附图3是一种基于云端的智能核桃运动模式识别方法智能核桃行走状态示意图,如附图3所示,上述行走状态模式是指用户处于行走状态,但是智能核桃在手中并未转动。
附图4是一种基于云端的智能核桃运动模式识别方法智能核桃识别算法流程图,如附图4所示,优选地,上述的一种基于云端的智能核桃运动模式识别方法步骤S606智能核桃动作识别具体包括以下步骤:
S801、对加速计和陀螺仪采集的加速度数据和角加速度数据进行三个坐标轴方向时间序列建模;
S802、以窗函数均值平滑对步骤S801构建的时间序列进行平滑,窗的宽度由运动状态识别频率决定;
S803、对步骤S802获取的平滑后时间序列基于LOESS算法进行分解,将各个坐标轴方向时间序列分解成趋势分量、周期分量和余项;
S804、计算同一坐标轴方向的加速度数据和角加速度数据,采用局部相关系数衡量某个时刻沿这个坐标轴方向的运动一致性;
S805、将步骤S804所计算的相关系数时间序列构建基于不同坐标轴方向的运动趋势三维相关特征序列;
S806、以步骤S805中三维相关特征序列为数据集构建分类器,分类器根据三维相关特征所表征的运动趋势相关性高低进行运动模式识别,当三维运动趋势强相关,则表示智能核桃处于旋转状态,当三维运动趋势弱相关,则表示智能核桃处于行走状态。
优选地,上述的一种基于云端的智能核桃运动模式识别方法,步骤S801以加速度计数据D表示三轴加速度,则加速度计时间序列用集合{D
优选地,上述步骤S806构建分类器进行智能核桃运动模式识别包括分类器模型训练过程,以及基于训练好的分类器对加速计和陀螺仪采集的加速度数据和角加速度数据进行实时识别过程。
优选地,上述的一种基于云端的智能核桃运动模式识别方法,采用支持向量机SVM,逻辑回归和决策树进行分类器模型训练。
实施例2
本实施例实现一种基于云端的智能核桃运动模式识别系统。
附图5是一种基于云端的智能核桃运动模式识别系统架构图,如附图5所示,本实施例一种基于云端的智能核桃运动模式识别系统,包括若干智能核桃、和上述若干智能核桃配对的手机以及云平台;上述智能核桃通过蓝牙和手机进行通讯,上述手机通过通讯链路和云平台进行通讯;上述智能核桃内置传感器用于采集用户运动数据传输至手机;上述手机用于接收运动数据,并将运动数据传输至云平台;上述云平台用于接收手机传输的运动数据,并存储、计算分析运动数据,反馈计算分析结果给手机;上述一种基于云端的智能核桃运动模式识别系统执行上述的一种基于云端的智能核桃运动模式识别方法。
优选地,上述智能核桃通过低功耗蓝牙协议和手机进行通信,上述手机采用消息队列遥测传输协议和云平台进行通信。
附图6是一种基于云端的智能核桃运动模式识别系统智能核桃控制板功能模块图,如附图6所示,优选地,上述智能核桃内置传感器单元、处理器单元和信号指示单元;上述传感器单元采集用户运动数据,上述处理器单元将采集的运动数据传输至手机端。
附图7是一种基于云端的智能核桃运动模式识别系统智能核桃透视图,如附图7所示,优选地,上述智能核桃包括智能核桃外壳,传感器控制板两个部分;上述传感器控制板包括传感器单元、信号指示单元和处理器单元;上述智能核桃外壳和普通文玩核桃外壳大小和形态相似,上述智能核桃外壳有纹状凸起,握感同普通文玩核桃相同;上述智能核桃内部空心化,传感器控制板位于智能核桃的两个半球中间。
附图8是一种基于云端的智能核桃运动模式识别系统手机应用功能模块图,如附图8所示,优选地,上述手机用于信息传输中继将采集的运动数据传输至云平台、用于给采集的运动数据标记时间信息、用于提供智能核桃动作识别服务、以及用于展示用户运动状态。
实施例3
本实施例实现一种基于云端的智能核桃运动模式识别系统。本实施例在实施例1、2的基础上具体实现,将从系统设计和智能识别算法两个方面进行介绍。
附图5是一种基于云端的智能核桃运动模式识别系统架构图,如附图5所示,本实施例一种基于云端的智能核桃运动模式识别系统包含智能核桃模块、智能手机数据采集应用模块、云端系统数据存储和计算模块。智能核桃模块和数据采集应用之间采用低功耗蓝牙协议(BLE)进行传感器数据传输。智能手机和云端系统则采用基于传感网的消息队列遥测传输协议(MQTT-SN)进行数据传输。传感器数据最终存储在云端,用于用户运动状况分析。同时,分析结果通过智能手机应用反馈给用户。
下面对基于云端动作识别智能核桃系统各模块进行详细说明。
附图7是一种基于云端的智能核桃运动模式识别系统智能核桃透视图,如附图7所示,智能核桃包括智能核桃外壳,传感器控制板两个部分。其中,传感器控制板包括传感器单元、信号指示单元和处理器单元。智能核桃外壳和普通文玩核桃外壳大小和形态相似,核桃外壳有纹状凸起,握感同普通核桃无异。核桃内部空心化,传感器控制板位于核桃的两个半球中间。传感器单元用于实时采集用户运动数据,信号指示单元用来指示设备工作状态,处理器单元则将采集的数据传输至智能手机。
附图6是一种基于云端的智能核桃运动模式识别系统智能核桃控制板功能模块图,如附图6所示,控制板包含处理器、开关按钮、信号指示灯、电池模块、加速度计和陀螺仪模块和数据接口模块。加速度计和陀螺仪模块构成传感器模块,用于数据采集。传感器模块和控制芯片之间采用I2C方式通信。控制板还安装有启动开关和信号指示灯。当运动传感器采集到数据后,数据通过控制芯片将数据传输至智能手机,并通过应用将数据传输至云端。
附图8是一种基于云端的智能核桃运动模式识别系统手机应用功能模块图,如附图8所示,智能手机上应用包括数据接收/发送模块、数据解析模块、发送配置模块、向云端收/发数据模块及信息展示模块。其中数据接收/发送模块用于接收智能核桃控制板发送的字节数据。字节数据则通过数据解析模块转换成字符串数据,最终发送至云端数据库存储。智能手机发送数据至云端的频率和字符串的时间戳、唯一标识码等信息则通过配置模块设定。信息展示模块主要实时展示用户的运动状态和云端发送至用户服务信息。在该系统中,智能手机有三个作用:(a)作为信息传输中继,将采集传感器数据传输至云端数据库;(b)传感器采集信息缺少时间信息,手机应用软件给传感器数据标记时间信息;(c)展示用户运动状态,提供智能识别服务。
云端系统包括数据接收模块、数据转换模块、模型训练和运动识别模块,以及Web信息展示控模块。其中,模型训练和运动识别模块构成计算模块。数据接收转换模块是一个消息中间件,当多个传感器数据传输至云端,数据并不直接存储至云端的数据库,而是缓存至转换模块中的消息队列中。转换模块中的解析子模块则持续从该消息队列中取出数据,并按照数据库存储规范,将数据解析成相应的格式,保存至数据库中。数据计算模块主要提供模型训练和动作识别算法,通过训练智能识别模型,对采集的数据所表征的运动状态进行识别,并将识别信息反馈至用户。同时,Web信息展示模块可事实展示信息采集状态和用户运动状态,Web信息通过权限控制对用户提供隐私保障。
基于智能核桃系统,本实施例中提出了一种可靠、精确的运动模式识别方法。附图1是一种基于云端的智能核桃运动模式识别方法流程图,如附图1所示,该方法包括下列步骤:
步骤S601,利用智能核桃内部传感器实时采集用户运动数据,采集数据包括智能核桃三个自由轴方向水平加速度和角加速度,从而构成六个维度的智能核桃运动数据;
步骤S602,按照固定的时间频率,将六个维度的传感器数据分别转化为时间序列。接着,按照设定长度的时间区间,对每个维度的时间序列进行趋势分解,提取该时间区间内的运动趋势;
步骤S603,由步骤S601可知,采集的数据为三个自由轴方向上运动数据。设定这三个轴分别为X、Y、Z轴,则每个轴方向均有水平加速度数据和旋转角加速度数据。核桃在进行旋转运动的时候,分为自转和公转两个过程。自转即智能核桃绕X、Y、Z三个轴旋转,公转则绕两个核桃几何中心旋转。在旋转过程中具有一定周期性。因此,以X、Y、Z三个轴为方向,分别计算加速度和角加速度运动趋势相关性;
步骤S604,以步骤S603计算的相关性结果构造X、Y、Z三个维度的特征;
步骤S605,利用步骤S604特征训练动作识别模型;
步骤S606,利用训练模型对新的数据进行动作识别,将识别结果反馈至用户。
至此,本实施例中介绍了智能核桃系统和核桃运动的识别流程。在实际应用中,用户在把玩智能核桃的时候,智能核桃的运动形态分为三种。这三种分别为:(a)人处于原地旋转核桃,此时核桃的运动状态为旋转状态,此时称核桃运动状态为状态a;(b)人处于行走状态同时旋转核桃,此时核桃的运动状态为行走和旋转状态,为状态b;(c)人处于行走状态,但是核桃在人手中并未转动,此时状态为状态c。此处不考虑人停止走动,并且停止转动手中核桃状态,此状态下,智能核桃的运动传感器各个方向上的数值均为0,因此不予考虑。而智能核桃运动状态a和状态b,其具有相同的旋转状态,区别在于b在X、Y、Z三轴水平方向上的加速度数值比a状态相同轴方向上的加速度值大。但是状态a和状态b的运动趋势是一致的,因此,可认为是两者均处于旋转状态,在运动数据上的表现为加速度和角加速非0,并且相同方向上的运动趋势一致。而状态c只在水平方向上存在运动加速度,角加速度趋于0。在实际应用中,状态a和状态b表示旋转状态,对用户手部神经进行按摩,均代表用户合理有效的运动时间。而状态c则代表休闲时间,为行走状态,并未起到舒缓手部运动神经作用。因此,在本实施例中,运动识别主要解决识别智能核桃的旋转状态和行走状态问题。
在实际应用中,当用户在行走时,智能核桃在正常工作时有旋转和行走两种运动状态。附图2是一种基于云端的智能核桃运动模式识别方法智能核桃旋转动作示意图,如附图2所示,核桃围绕两个核桃几何中心旋转,产生角加速度。同时,用户按照一定方向行走则产生水平方向加速度。这两种类型数据均被智能核桃内部的传感器数据采集。附图3是一种基于云端的智能核桃运动模式识别方法智能核桃行走状态示意图,如附图3所示,当核桃静止在手中时,其只有水平方向加速度。附图4是一种基于云端的智能核桃运动模式识别方法智能核桃识别算法流程图,如附图4所示,识别算法进行智能核桃两种运动方式的识别。具体方法包括以下步骤:
步骤S801,对加速计和陀螺仪数据进行时间序列建模。若以加速度计数据D表示三轴加速度,则加速度计时间序列用集合{D
步骤S802,对步骤S801时间序列进行平滑。由于传感器采集数据存在噪声,以窗函数均值平滑对步骤S801构建的时间序列进行平滑,窗的宽度由运动状态识别频率决定。
步骤S803,对S802步骤获取的平滑后的时间序列利用基于LOESS算法进行分解,将各个坐标轴方向时间序列分解成趋势分量、周期分量和余项。当智能核桃处于旋转状态时,同一轴方向的加速和角加速度在运动趋势一致,在本实施例中采用分解后的运动趋势作为智能核桃运动特征数据。智能核桃在旋转时的运动方向和运动趋势,沿着同一坐标轴方向的加速度和角加速度运动趋势一致。
步骤S804,计算同坐标轴方向传感器数据一致性。本实施例中采用局部相关系数衡量某个时刻沿坐标轴方向的运动一致性。根据步骤S801中表示方法,X、Y、Z的坐标方向加速度和角加速度之间的局部相关系数如下式所示:H
对于每个时间点T
由智能核桃沿Z轴方向旋转状态和行走状态下,加速度和角加速度数据分布状况可以看出在旋转状态,加速度和角加速度呈现近似线性相关变化。而在行走状态,这两者分布并未呈现明显相关性。不同运动模式下,相关系数分布不同。旋转模式下,相关系数趋近1,分布集中;行走模式下,相关系数小于0.6,且分布均匀。
步骤S805,将步骤S804所计算的相关系数时间序列构成一个三维特征,表示为
步骤S806,以步骤S805中H
构建分类器进行运动模式识别包括两个过程,一个是分类器模型训练,另一个是基于分类器对传感器采集数据进行实时识别。在本实施例中,分类器可采用支持向量机SVM,逻辑回归和决策树。用户可以根据需要,选择合适的分类器模型进行训练。
附图9是一种基于云端的智能核桃运动模式识别系统分类模型和利用模型进行运动模式识别的流程图,如附图9所示模型训练和运动模式识别过程。模型训练包括传感器数据采集,特征构建和模型训练三个过程。数据采集由智能核桃采集,经手机传输至云端。特征构建则按照步骤S801至S805对数据进行构建。利用构建后的特征训练分类模型,训练好的模型则部署在云端,并提供模型通用接口。运动模式识别过程包括数据采集,特征构建、动作识别三个过程。特征构建完成后,程序调用模型接口,对实时采集数据进行识别,由此判断智能核桃运动状态,并将结果保存至数据库中。系统根据数据库中的识别结果开发应用,并实时推送至用户手机端。
综上所述,本实施例中,利用智能核桃采集加速度和角加速度数据,并通过智能手机传输至云端。在云端,构建传感器时间序列,并根据时间序列分析智能核桃不同坐标轴方向的运动趋势。以相同坐标轴方向运动趋势的相关性构建智能核桃运动特征,并通过机器学习算法构建分类模型,对智能核桃的旋转模式和行走模式进行识别。通过对智能核运动模式识别,用户可获取运动状态的定量评估结果,从而合理制定运动计划,达到良好的保健效果。
本实施例中提供了一种电子设备和云端模式识别系统。其中,电子设备包括加速度计、陀螺仪和处理器。陀螺仪、加速度计通过内部总线和处理器连接。处理器将采集的数据以蓝牙通信方式传输至智能手机。运动模式系统包括一个信息接收队列、数据库和算法识别模块。智能手机将电子设备采集的数据传输至云端信息接收队列,数据解析模块将数据解析成标准记录保存至数据库中,算法识别模块则从数据中提取特征,通过训练好的模型进行电子设备的运动模式识别。系统对识别结果进行分析,并反馈给用户。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(Read-Only Memory,ROM)或随机存储记忆体(Random AcessMemory,RAM)等。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和补充,这些改进和补充也应视为本发明的保护范围。
- 一种基于云端的智能核桃运动模式识别方法及系统
- 一种基于云端的智能核桃运动模式识别方法及系统