编码装置、编码方法、解码装置、解码方法和程序
文献发布时间:2023-06-19 09:44:49
技术领域
本技术涉及一种编码触觉信号(例如,振动信号)的编码装置及其方法、一种解码通过编码触觉信号而获得的编码数据的解码装置及其方法、以及一种程序。
背景技术
近年来,通过与人体皮肤接触的触觉呈现装置给出触觉刺激的应用被用于各种情况。在此处,“触觉呈现”意味着触觉刺激的产生。
例如,在配备有触摸面板的移动终端(例如,智能手机)中,通过振动面板(或外壳)来模拟按钮的触摸感觉,以在触摸面板时给手指以触觉刺激。
在聆听音乐时,触觉呈现装置内置在耳机外壳中,并且在音乐回放的同时给予触觉刺激,以强调低音。
在计算机游戏和虚拟现实(VR)领域中,触觉呈现装置安装在控制器中,以响应于用户的操作,根据场景交互式地给出触觉刺激,从而增加用户的沉浸感。
在娱乐设施中,安装在座位上的触觉呈现装置根据电影院、主题公园等中的场景给予游客触觉刺激,以提高游客的真实感。
此外,在研发阶段,当远程控制机器人等时,由机器人或要操作的目标接收的振动被反馈到操作员手中的控制器,从而直观地获得机器人或目标周围的情况,以用于预测危险(例如:灾难响应机器人
此外,在医学领域,正在进行研究,以通过向操作员反馈操作手术机器人时内窥镜的镊子接触器官的感觉(硬度),来提高手术精度(例如:手术支持机器人达芬奇
注意,以下专利文献1和专利文献2公开了相关的传统技术。
引文列表
专利文献
专利文献1:日本专利申请公开号2016-202486
专利文献2:日本专利申请公开号2015-53038
发明内容
本发明要解决的问题
在此处,存在各种各样的触觉呈现装置(触觉呈现装置),用于给人以触觉刺激,并且还存在应该由电信号来表示的各种各样的物理量以用于驱动该物理量(例如,加速度、位移和角速度)。作为再现触觉信息的系统,还假设一种以混合方式使用与不同物理量相对应的不同类型的触觉呈现装置的系统,并且在这种情况下,需要准备表示各种物理量的信号作为触觉信号,使得任何触觉呈现装置可以使用这些信号。
然而,如果记录并传输所有物理量,则信息量将变得巨大,这将导致系统负荷增加。
鉴于上述情况,实现了本技术,并且其目的是减少触觉呈现所需的数据量,同时能够驱动与不同物理量相对应的不同类型的触觉呈现装置。
问题的解决方案
根据本技术的编码装置包括:编码单元,通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而生成编码数据。
这使得可以通过利用物理量之间的相互转换特性来压缩信息量,同时获得表示可执行相互转换的范围内的期望物理量的触觉信号。
在根据上述本技术的编码装置中,编码单元理想地允许编码数据包括特定信号和误差信息,该特定信号是表示特定物理量的触觉信号,该误差信息指示当特定信号被转换成表示另一物理量的触觉信号时的转换误差。
因此,解码侧可以通过基于误差信息校正通过特定信号的物理量转换获得的信号,来正确地获得表示除了特定信号的物理量(特定物理量)之外的物理量的触觉信号。因此,编码数据不必包括表示除特定物理量之外的物理量的触觉信号本身。
在根据上述本技术的编码设备中,期望编码单元允许编码数据包括指示特定信号与表示另一物理量的触觉信号之间的差值的差分信息,作为误差信息。
因此,对特定信号的转换信号的误差校正可以通过将由差分信息指示的差值添加到特定信号的转换信号的简单过程来实现。
在根据上述本技术的编码装置中,期望编码单元允许编码数据包括用于识别由特定信号表示的物理量的识别信息,作为误差信息。
因此,当在解码侧指定特定信号的物理量时,变得没有必要对特定信号执行信号分析。
在根据上述本技术的编码装置中,期望编码单元通过利用微积分的相互转换特性作为编码来执行编码以压缩信息量。
因此,在解码侧,可以基于编码数据获得表示位移、速度和加速度之外的期望物理量的触觉信号。
此外,根据本技术的编码方法是一种编码方法,包括:通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而生成编码数据。
同样通过这种编码方法,可以获得类似于根据上述本技术的编码装置的效果。
此外,根据本技术的第一程序是一种程序,该程序使信息处理装置通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而实现生成编码数据的功能。
通过根据本技术的这种第一程序,实现了根据上述本技术的编码装置。
根据本技术的解码装置包括:解码单元,对编码数据进行解码,以获得触觉信号,通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而生成该编码数据。
这使得可以通过利用物理量之间的相互转换特性来压缩信息量,同时获得表示可执行相互转换的范围内的期望物理量的触觉信号。
在根据上述本技术的解码装置中,期望编码数据包括特定信号和误差信息,该特定信号是表示特定物理量的触觉信号,该误差信息指示当特定信号被转换成表示另一物理量的触觉信号时的转换误差,并且期望解码单元将特定信号转换成表示另一物理量的触觉信号,并基于误差信息校正转换后的触觉信号。
因此,对于表示除了特定信号的物理量(表示为“特定物理量”)之外的物理量的触觉信号,编码数据不必包括信号本身。此时,由于基于误差信息校正通过特定信号的物理量转换而获得的信号,所以变得可以正确地获得表示除了特定物理量之外的物理量的触觉信号。
在根据上述本技术的解码装置中,期望误差信息是指示特定信号与表示另一物理量的触觉信号之间的差值的差分信息。
因此,对特定信号的转换信号的误差校正可以通过将由差分信息指示的差值添加到特定信号的转换信号的简单处理来实现。
在根据上述本技术的解码装置中,期望编码数据包括用于识别由特定信号表示的物理量的识别信息,并且期望解码单元基于识别信息执行解码。
因此,当指定特定信号的物理量时,变得没有必要对特定信号执行信号分析。
在根据上述本技术的解码装置中,在基于识别信息指定的特定信号的物理量与预定物理量一致的情况下,解码单元理想地输出特定信号。
因此,可以基于与特定信号的物理量与触觉呈现装置所对应的物理量一致的情况相对应的特定信号来适当地驱动触觉呈现装置。
在根据上述本技术的解码装置中,在基于识别信息指定的特定信号的物理量与预定物理量不一致的情况下,期望解码单元将特定信号转换成表示预定物理量的信号,并基于误差信息校正转换后的信号,以输出。
因此,可以通过基于与特定信号的物理量与触觉呈现装置对应的物理量不一致的情况相对应的误差信息校正特定信号的转换信号而获得的信号,来适当地驱动触觉呈现装置。
在根据上述本技术的解码装置中,期望解码单元解码编码数据,通过利用微积分的相互转换特性以压缩信息量来执行编码,从而生成该编码数据。
因此,可以基于编码数据获得表示位移、速度和加速度之外的期望物理量的触觉信号。
在根据上述本技术的解码装置中,期望解码单元调整通过解码而获得的触觉信号的幅度。
这使得可以根据基于触觉信号驱动的触觉呈现装置的类型来适当地调整触觉信号的幅度的大小。
此外,根据本技术的解码方法是一种解码方法,用于对编码数据进行解码以获得触觉信号,通过利用物理量之间的相互转换特性面对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而生成该编码数据。
同样通过这种解码方法,可以获得与根据上述本技术的解码装置的效果类似的效果。
此外,根据本技术的第二程序是一种程序,该程序使信息处理装置实现对编码数据进行解码以获得触觉信号的功能,通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而生成该编码数据。
通过根据本技术的这种第二程序,实现了根据上述本技术的解码装置。
本发明的效果
根据本技术,可以减少触觉呈现所需的数据量,同时能够驱动与不同物理量相对应的不同类型的触觉呈现装置。
注意,效果不必受限于本文描述的效果,并且可以是本公开中描述的效果。
附图说明
[图1]是示出作为根据本技术的实施例的包括解码装置的触觉再现系统的配置示例的视图;
[图2]是用于示出作为实施例的编码装置的内部配置示例的视图;
[图3]是用于示出作为实施例的解码装置的内部配置示例的视图;
[图4]是示出第一示例中的记录环境的示例的视图;
[图5]是示出与第一示例相对应的编码单元的配置的视图;
[图6]是用于示出在第二示例中使用的触觉呈现装置的示例的视图;
[图7]是用于示出在第二示例中使用的触觉呈现装置的另一示例的视图;
[图8]是示出与第二示例相对应的编码单元的配置的视图;
[图9]是示出实施例中的编码格式的示例的视图;
[图10]是示出作为实施例的解码装置中的关于编码数据的解码的功能配置的功能框图;
[图11]是示出应该被执行以用于实现作为实施例的解码功能的具体过程的流程图;
[图12]是示出作为变体的编码处理的流程图。
具体实施方式
在下文中,参照附图以以下顺序描述根据本技术的实施例。
<1.触觉再现系统的概述>
<2.编码装置的配置>
<3.解码装置的配置>
<4.作为实施例的触觉再现方法>
[4-1.第一示例]
[4-2.第二示例]
[4-3.编码格式的示例]
[4-4.解码侧的功能配置]
[4-5.解码侧过程]
<5.变体>
<6.实施例的概要>
<7.本技术>
在此处,在本说明书中,每个术语定义如下。
触觉刺激:促使人感知触觉的物理现象,例如,振动现象等。
触觉呈现:触觉刺激的产生。
触觉信息:通过触觉感知的信息,例如,振动信息等。
触觉信号:表示触觉刺激模式的信号,例如,表示振动波形等的信号。
接收者:接收触觉呈现的人。
编码数据:通过编码信号而获得的数据。存在流和帧,作为更具体的概念。
<1.触觉再现系统的概述>
图1示出作为根据本技术的实施例的包括解码装置(再现装置3)的触觉再现系统1的配置示例。
首先,在该实施例中,用于实现触觉再现的环境设置有:编码通过感测目标触觉信息(触觉刺激)而获得的触觉信号并记录通过编码而获得的编码数据Dc的记录环境、以及基于通过解码编码数据Dc而获得的触觉信号来再现触觉信息的再现环境。
如所示出,触觉再现系统1在记录环境中设置有第一触觉传感器5-1和第二触觉传感器5-2以及第一触觉传感器5-1和第二触觉传感器5-2连接到的编码装置2,并且在再现环境中,设置有被配置为能够获取编码数据Dc的再现装置3和连接到再现装置3的触觉呈现装置6。
第一触觉传感器5-1和第二触觉传感器5-2是感测触觉刺激的传感器,并且在该示例中使用例如压电拾音器和加速度传感器的振动传感器。在该示例中,第一触觉传感器5-1和第二触觉传感器5-2用于与待感测的目标接触,并且输出振动和运动作为电压的变化。
注意,在该示例中,第一触觉传感器5-1和第二触觉传感器5-2输出表示不同物理量的检测信号,并且这将在后面描述。
此外,作为第一触觉传感器5-1和第二触觉传感器5-2,也可以使用与目标执行非接触感测的传感器。
例如,设置有例如中央处理单元(CPU)和数字信号处理器(DSP)的计算机装置的编码装置2在例如内部设置的存储装置中记录通过根据预定数据格式对编码数据Dc进行编码而获得的编码数据Dc,第一触觉传感器5-1和第二触觉传感器5-2的检测信号(触觉信号)被输入到该计算机装置。
设置有例如CPU和DSP的计算机装置的再现装置3对获取的编码数据Dc进行解码,并基于通过解码获得的触觉信号来驱动触觉呈现装置6。例如,由再现装置3经由例如互联网的所需网络获取记录在记录环境中的编码数据Dc。可替代地,编码数据Dc可以记录在便携式记录介质上,并且再现装置3可以经由该记录介质获取编码数据Dc。
触觉呈现装置6是产生触觉刺激的装置,并且在该示例中,使用例如振动器和致动器的振动装置。
在该示例中,触觉呈现装置6附接到接收者的身体的预定部位,以便再现在记录环境中感测到的触觉刺激。
注意,作为触觉呈现装置6,也可以使用在未附接到接收者的状态下执行触觉呈现的装置。
图1所示的触觉再现系统1被配置为还能够支持记录环境和再现环境位于远程的情况的系统。
注意,尽管图1示出触觉呈现装置6与再现装置3分开设置的示例,但是触觉呈现装置6也可以与再现装置3一体形成。具体地,例如,可以存在振动装置内置于例如智能手机等的便携式终端中的配置。
<2.编码装置的配置>
图2是用于示出编码装置2的内部配置示例的视图。注意,图2示出了编码装置2的内部配置示例以及图1所示的第一触觉传感器5-1和第二触觉传感器5-2。
如所示出的,编码装置2为第一触觉传感器5-1和第二触觉传感器5-2中的每一个设置有放大器21和A/D转换器22以及预处理单元23、编码单元24、控制单元25、存储单元26、通信单元27和总线28。预处理单元23、编码单元24、控制单元25、存储单元26和通信单元27经由总线28彼此连接,从而可以执行数据通信。
第一触觉传感器5-1和第二触觉传感器5-2的检测信号被输入到相应的放大器21,以被调整成具有适当的动态范围,然后输入到相应的A/D转换器22,以进行模拟/数字转换(A/D转换)。
经过A/D转换的每个检测信号(即,表示触觉刺激模式的触觉信号)输入到预处理单元23。预处理单元23执行各种类型的数字信号处理,例如,噪声去除和对第一触觉传感器5-1和第二触觉传感器5-2的传感器特性的校准。
经过预处理单元23的信号处理的每个触觉信号被输入到编码单元24。
编码单元24例如包括DSP,根据预定的数据格式对输入触觉信号进行编码,并获得上述编码数据Dc。
注意,稍后将再次描述作为该实施例的触觉信号的编码。
控制单元25设置有包括例如CPU、只读存储器(ROM)、随机存取存储器(RAM)等的微型计算机,并且根据存储在ROM中的程序执行处理,以执行对编码装置2的整体控制。
例如,控制单元25经由通信单元27执行与外部装置的数据通信。
通信单元27被配置为能够经由例如互联网的网络执行与外部装置的数据通信,并且控制单元25可以经由通信单元27执行与连接到网络的外部装置的数据通信。具体地,由编码单元24获得的编码数据Dc可以经由通信单元27传输到外部装置。
存储单元26综合地表示例如硬盘驱动器(HDD)和固态驱动器(SSD)的存储装置,并且用于存储编码装置2中的各种数据。例如,存储单元26存储控制单元25控制所需的数据。此外,由编码单元24获得的编码数据Dc可以基于控制单元25的控制存储在存储单元26中。
<3.解码装置的配置>
图3是用于示出再现装置3的内部配置示例的视图,在该视图中,图1中示出的触觉呈现装置6与再现装置3的内部配置示例一起示出。再现装置3是根据本技术的解码装置的实施例。
如所示出的,再现装置3设置有放大器31、D/A转换器32、后处理单元33和解码单元34以及控制单元35、通信单元36、介质驱动器37、存储单元38和总线39。后处理单元33、解码单元34、控制单元35、通信单元36、介质驱动器37和存储单元38经由总线39彼此连接,从而可以执行数据通信。
控制单元35设置有例如包括CPU、ROM、RAM等的微型计算机,并根据存储在ROM中的程序执行处理,以执行再现装置3的整体控制。
通信单元36被配置为能够经由例如互联网的网络与外部装置进行数据通信。控制单元35可以经由通信单元36执行与连接到网络的外部装置的数据通信。具体地,这可以允许通信单元36从外部装置(例如,网络上的服务器装置)接收编码数据Dc。
介质驱动器37被配置为便携式记录介质可拆卸地附接到的读取器/写入器单元,该介质驱动器37能够在附接的记录介质上写入数据/从附接的记录介质读取数据。由介质驱动器37支持的记录介质的示例可以包括例如存储卡(例如,便携式闪存)、光盘记录介质等。
介质驱动器37可以读取记录在便携式记录介质上的编码数据Dc。
存储单元38例如综合地表示例如HDD和SSD的存储装置,并且用于存储再现装置3中的各种数据。例如,存储单元38存储控制单元35控制所需的数据。此外,基于控制单元35的控制,由介质驱动器37读取的编码数据Dc和由通信单元36从外部装置接收的编码数据Dc可以存储在存储单元38中。
操作单元39综合地表示再现装置3上设置的各种操作子,并将与操作输入相对应的操作输入信息输出到控制单元35。
控制单元35根据操作输入信息执行处理。因此,再现装置3根据操作输入实现操作。
基于控制单元35的控制,编码数据Dc被输入到解码单元34。
解码单元34通过稍后描述的方法解码输入的编码数据Dc,以获得触觉信号。由解码单元34获得的触觉信号输入到后处理单元33。
后处理单元33根据需要对输入的触觉信号执行信号处理(例如,触觉呈现装置6的校准和预定的滤波处理)。
经过后处理单元33的触觉信号被输入到D/A转换器32并经过数字/模拟转换(D/A转换),该触觉信号由放大器31调整为具有适当的动态范围,并输出到触觉呈现装置6。
因此,基于触觉信号驱动触觉呈现装置6,并且作为记录环境中的感测目标的触觉刺激可以被提供至接收者(即,可以再现触觉信息)。
注意,尽管上面仅描述了触觉信号,但是该触觉信号也可以被配置为将音频信号和视频信号与触觉信号一起记录,并将声音和视频与触觉信息一起提供至接收者。
<4.作为实施例的触觉再现方法>
[4-1.第一示例]
在第一示例中,考虑以下情况,在网上购物中,卖家向买家展示产品的纹理。在这种情况下的触觉再现系统1中,在记录环境中,通过第一触觉传感器5-1和第二触觉传感器5-2感测产品的纹理而获得的触觉信号被编码装置2编码,并且在再现环境中,基于通过解码由再现装置3编码获得的编码数据Dc而获得的触觉信号,来驱动附接到作为买家的接收者的触觉呈现装置6。
此时,在买家侧使用的触觉呈现装置6不一定是相同类型的,并且系统可以允许与不同物理量相对应的不同类型的触觉呈现装置6的混合;例如,某个买家的触觉呈现装置6是响应于表示加速度的触觉信号而操作的装置,另一买家的触觉呈现装置6是响应于表示位移等的触觉信号而操作的装置。
在允许不同类型的触觉呈现装置6以这种方式混合的情况下,为了能够适当地驱动每种类型的触觉呈现装置6,认为表示各种物理量的多个触觉信号包括在编码数据Dc中;然而,在这种情况下,编码数据Dc的信息量(数据量)是巨大的,这导致系统负荷的增加。
因此,本实施例的目的是减少触觉呈现所需的数据量,同时能够驱动与不同物理量相对应的不同类型的触觉呈现装置6。
图4示出了第一示例中的记录环境的示例。
在第一示例中,例如,作为桌子的产品的纹理由作为第一触觉传感器5-1和第二触觉传感器5-2的多个触觉传感器感测。
具体地,在该示例中,第一触觉传感器5-1是输出表示加速度的检测信号的类型的触觉传感器,例如,压电元件(压电拾音器),并且第二触觉传感器5-2是输出表示位移的检测信号的类型的触觉传感器,例如,激光位移计。在这种情况下,通过用配备有第一触觉传感器5-1的仪器跟踪产品来获得表示加速度的触觉信号,通过用配备有第二触觉传感器5-2的仪器跟踪产品来获得表示位移(产品表面中的位移)的触觉信号。
在此处,关注以下事实,加速度是应该通过对位移应用二阶求导而获得的值并且位移是应该通过对加速度应用二阶积分而获得的值,加速度信号原样包括在编码数据Dc中,而作为位移信号,加速度的二阶积分值的差值包括在编码数据Dc中,而不是整个信号。
此外,在编码数据Dc中,存储位移参考值和速度参考值的一个或多个样本,作为用于解码的信息。
作为位移的参考值,存储第二触觉传感器5-2的触觉信号的样本值。可以基于第二触觉传感器5-2的触觉信号的样本值(即,位移值)来获取速度参考值。具体地,这作为多个位移样本之间的差值来获得。注意,作为速度参考值,也可以使用由与记录环境中的第一触觉传感器5-1和第二触觉传感器5-2分开准备的用于速度检测的传感器检测到的值。
位移和速度参考值的样本数量越大,可以控制的与积分值的差就越小,从而可以根据信息量的容限来改变。
如上所述,在这示例中,加速度和位移信号的两个系统不原样包括在编码数据Dc中;对于加速度,原样包括由第一触觉传感器5-1检测到的信号,但是对于位移信号,包括由第二触觉传感器5-2检测到的位移信号和由第一触觉传感器5-1检测到的加速度信号的二阶积分之间的差的信号。
由于来自二阶积分的差的信号需要比整个信号短的码长,所以与两个系统的信号原样包括在编码数据Dc中的情况相比,信息量可以减少。
在下文中,要原样包括在编码数据Dc中的信号(例如,以上描述中的加速度信号)被称为“原始信号”,并且作为位移信号,获得其与原始信号的物理量转换信号的差分的信号被称为“获得其差分的信号”。此外,表示“获得其差分的信号”与“原始信号的物理量转换信号”之间的差分的信号(例如,以上描述中的位移信号与加速度的二阶积分之间的差的信号)被称为“差分信号”。
接下来,描述再现环境中触觉呈现的方法。
在再现环境中,例如,存在使用由加速度信息驱动的装置(例如,压电元件)的情况以及使用由位移信息驱动的装置(例如,针阵列)作为触觉呈现装置6的情况。
在触觉呈现装置6是由加速度信息驱动的装置的情况下,通过原样使用编码数据Dc中表示加速度的信号来驱动触觉呈现装置6。
另一方面,在触觉呈现装置6是由位移信息驱动的装置的情况下,基于编码数据Dc中的加速度信号和差分信号来执行位移的解码处理。具体地,首先,通过使用加速度的积分运算的结果和速度参考值来获得速度,并且进一步,通过使用速度的积分运算的结果和位移参考值来获得作为加速度的二阶积分值的位移信号。然后,将差分信号添加到这个位移信号上。因此,可以校正由转换引起的误差,并且可以获得与通过位移传感器(第二触觉传感器5-2)感测而获得的位移信号非常接近的位移信号。
在此处,如果减少数据量被优先化,则编码数据Dc也可以仅包括加速度信号,并且触觉呈现装置6由通过对该加速度信号执行二阶积分而获得的位移信号驱动。然而,由于积分运算受到信号的DC分量的强烈影响,所以在加速度信号中混合了噪声的情况下,位移会变成与原始值相差很大的值,从而不能执行正确的触觉再现。通过应用适当的频率滤波器,可以避免这个问题,但是作为位移的触觉信息,在DC分量附近也存在大量有效信息,使得当通过上述频率滤波器去除DC分量时,可能变得不可能再现有效的触觉信息(例如,产品表面形状的渐变)。
在作为上述实施例的触觉再现方法中,可以获得正确的触觉信号,在该方法中,通过不对物理量转换信号应用这种频率滤波器,而是基于差分信号对该物理量转换信号进行校正,来防止有效触觉信息丢失,从而可以提高触觉再现的正确性。
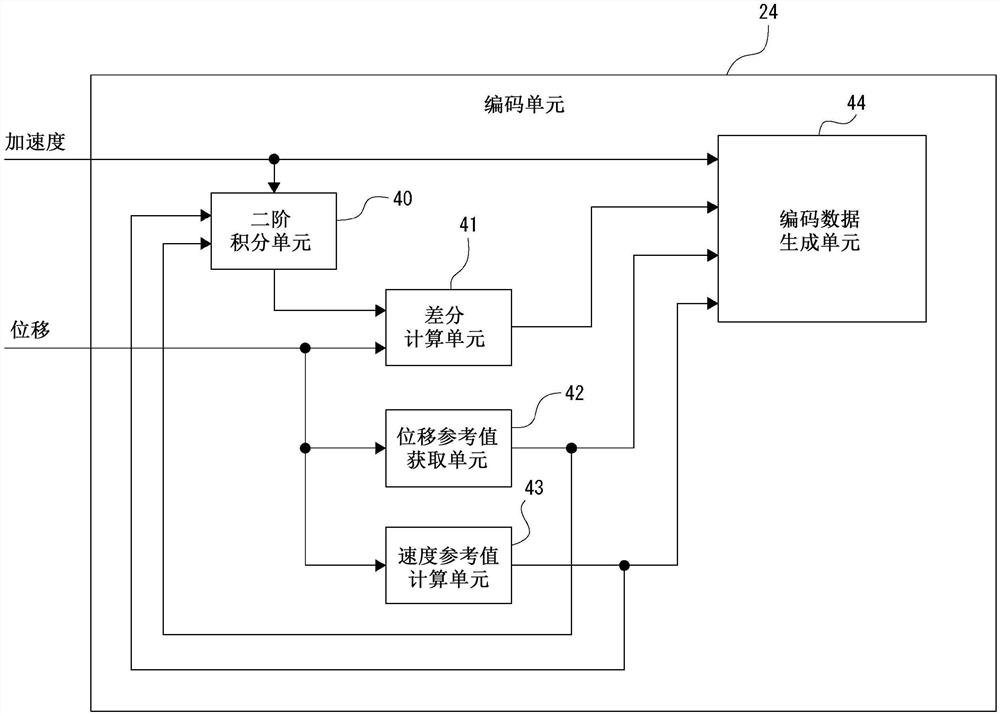
图5是示出与第一示例相对应的编码单元24的配置的视图。
如所示出的,编码单元24设置有二阶积分单元40、差分计算单元41、位移参考值获取单元42、速度参考值计算单元43和编码数据生成单元44。
在编码单元24中,表示加速度的触觉信号被输入到二阶积分单元40和编码数据生成单元44。在此处,表示加速度的触觉信号由第一触觉传感器5-1检测,并在本示例中经由预处理单元23输入到编码单元24。
此外,在编码单元24中,表示位移的触觉信号被输入到差分计算单元41、位移参考值获取单元42和速度参考值计算单元43。在该示例中,表示位移的触觉信号由第二触觉传感器5-2检测,并经由预处理单元23输入到编码单元24。
注意,在下文中,表示加速度的触觉信号被称为“加速度信号”,并且表示位移的触觉信号有时被称为“位移信号”。
位移参考值获取单元42获取位移信号的样本值,作为位移参考值,并将获取的位移参考值输出到二阶积分单元40和编码数据生成单元44。
速度参考值计算单元43通过计算位移信号的多个样本之间的差值来获取速度参考值,并将获取的速度参考值输出到二阶积分单元40和编码数据生成单元44。
二阶积分单元40对加速度信号执行积分运算,并基于积分运算的结果和速度参考值来获得表示速度的信号(以下也被称为“速度信号”),对速度信号执行积分运算,并基于积分运算的结果和位移参考值来获得表示位移的信号。以这种方式通过对加速度信号的二阶积分而获得的表示位移的触觉信号被称为“物理量转换成位移的信号”。
二阶积分单元40将物理量转换成位移的信号输出到差分计算单元41。
差分计算单元41计算位移信号与物理量转换成位移的信号之间的差,以获得差分信号,并将该差分信号输出到编码数据生成单元44。
编码数据生成单元44根据预定的数据格式对输入的加速度信号、差分信号、速度参考值和位移参考值进行编码,并生成编码数据Dc。稍后描述在本实施例中采用的编码格式的具体示例。
注意,解码侧的配置和处理类似于将在下文中描述的第二示例中的配置和处理,因此对其进行描述。
[4-2.第二示例]
第二示例是在电影中,除了视频和声音之外,触觉(例如,实际记录的振动)被呈现给观众的示例。
在该示例中,以类似于在电影拍摄阶段的视频拍摄和音频记录的方式,来执行触觉信息的感测,以作为触觉记录。获得表示想要呈现给观众的触觉的多个物理量作为专用传感器的检测信号。例如,附接到演员身体上的惯性传感器(加速度传感器)测量加速度,距离测量传感器测量身体运动的幅度(即,位移)。
在此处,集中于加速度与位移之间的二阶微积分的相互转换特性,位移信号原样包括在编码数据Dc中,并且对于加速度信号,代替整个信号,包括与位移的二阶微分值的差值。
具体地,在该示例中,同样假设第一触觉传感器5-1是输出表示加速度的检测信号的类型的装置,并且第二触觉传感器5-2是输出表示位移的检测信号的类型的装置,在这种情况下,在编码数据Dc中,由第二触觉传感器5-2检测的信号被原样包括以用于位移,而表示由第一触觉传感器5-1检测到的加速度信号与由第二触觉传感器5-2检测到的位移信号的二阶微分之间的差的差分信号被包括以作为加速度信号。
当基于这样的编码数据Dc执行触觉呈现时,触觉呈现装置6的类型可以根据观众观看电影的情况而不同,从而根据触觉呈现装置6的类型来切换解码方法。
例如,在触觉呈现装置6是由位移信息驱动的装置的情况下,通过原样使用编码数据Dc中包括的位移信号来驱动触觉呈现装置6。
另一方面,在触觉呈现装置6是由加速度信息驱动的装置的情况下,执行加速度的解码处理。具体地,首先,对编码数据Dc中包括的位移信号执行二阶微分,并且进一步,编码数据Dc中包括的差分信号被添加到通过二阶微分而获得的信号。因此,可以适当地校正通过对位移的二阶微分而获得的信号中所出现的误差(来自实际检测的加速度信号的误差)。
在此处,如果位移信号如在本示例中那样包括在编码数据Dc中,则可以通过使用通过对位移信号的二阶微分而获得的加速度信号来驱动与加速度相对应的触觉呈现装置6,但是由于微分运算受到高频噪声的强烈影响,所以最终呈现的信号中的高频噪声可能被极大地放大,并且不能执行正确的触觉呈现。
在该示例中,通过对位移信号的二阶微分而获得的加速度信号不按原样使用,而是基于差分信号执行误差校正,从而可以执行正确的触觉呈现。
此外,在第二示例中,考虑触觉呈现装置6本身的物理特性来执行调整触觉信号的幅度的处理。
具体地,作为在第二示例中的再现环境中使用的触觉呈现装置6,假设如图6所示的大功率位移驱动装置(例如,使电影院中的座椅振动的线性马达)的情况以及如图7所示的小功率加速驱动装置(例如,安装在便携式终端(例如,智能手机)上的压电元件)的情况。
在第二示例中,再现装置3(解码单元34)根据这种触觉呈现装置6的物理特性来调整触觉信号的幅度。具体地,例如,在图6的情况下,调整触觉信号,使得触觉信号的幅度变得大于图7的情况。
利用如上所述的作为第二示例的触觉再现系统1,电影制作者可以在不考虑要在再现环境中使用的触觉呈现装置6的类型的情况下进行记录,并且可以在不会极大地损害信息的情况下压缩编码数据Dc的数据量。此外,因为触觉刺激被添加到视频和声音,所以作为接收者的用户可以享受更强大的电影。
图8是示出与第二示例相对应的编码单元24的配置的视图。
如所示出的,这种情况下的编码单元24设置有二阶微分单元45、差分计算单元41A和编码数据生成单元44A。
在这种情况下,位移信号被输入到编码数据生成单元44A和二阶微分单元45,并且加速度信号被输入到差分计算单元41A。
二阶微分单元45对位移信号执行二阶微分,以获得物理量转换成加速度的信号。
由二阶微分单元45获得的物理量转换成加速度的信号被输入到的差分计算单元41A计算加速度信号与物理量转换成加速度的信号之间的差,以获得差分信号。
编码数据生成单元44A根据预定的数据格式对位移信号和差分计算单元41A获得的差分信号进行编码,以生成编码数据Dc。
[4-3.编码格式的示例]
图9示出该实施例中的编码格式的示例。
在此处,假设通过以与通过音频信号中的线性脉冲编码调制(LPCM)方法获得的采样频率相似的预定采样频率,对触觉传感器所获得的时间序列电压变化进行采样,来获得数字触觉信号。在本示例中的编码中,这种数字触觉信号被划分成适于在时间方向上传输的帧,并且添加报头(帧报头),作为每个帧的额外信息。
具体地,考虑图9所示的数据格式。
注意,尽管在上述第一和第二示例中描述了“原始信号”和“获得其差分的信号”是二阶微积分关系的示例,但是“原始信号”和“获得其差分的信号”也可以具有一阶微积分关系。具体地,存在原始信号是位移并且获得其差分的信号是速度的情况、原始信号是速度并且获得其差分的信号是加速度的情况、原始信号是加速度并且获得其差分的信号是速度的情况以及原始信号是速度并且获得其差分的信号是位移的情况。
图9所示的格式也可以支持“原始信号”和“获得其差分的信号”处于一阶微积分关系的情况。
如所示出,一个帧包括用于存储作为帧报头的信息的报头区域和用于存储触觉信号的实际数据的实际数据区域。
作为原始信号的触觉信号和差分信号存储在实际数据区域中。
在帧报头中,用于存储例如“同步”、“采样频率”、“原始信号的量化比特长度”、“差分信号的量化比特长度”、“块大小”、“原始信号的物理量ID”、“差分信号的物理量ID”、“参考值的样本数量”和“参考值”的每个信息的区域从开始按此顺序定义。
“同步”是表示帧开始的标识符,并且存储预定模式的数据。“采样频率”表示原始信号和差分信号的采样频率。原始信号和差分信号的量化比特长度分别表示原始信号和差分信号的每个样本的量化比特长度。
“块大小”表示帧中沿时间方向存储的原始信号和差分信号的大小(样本数量)。本文的块表示原始信号和差分信号的时间方向上的处理单元。
“原始信号的物理量ID”和“差分信号的物理量ID”是用于识别原始信号和差分信号分别与加速度、速度和位移中的哪个物理量相对应的标识符。在此处,作为“差分信号的物理量ID”,在如第一示例中“获得其差分的信号”是位移信号的情况下,存储表示“位移”的ID,并且在如第二示例中“获得其差分的信号”是加速度信号的情况下,存储表示“加速度”的ID。
例如,物理量ID可以是2比特信息,“00”可以分配给加速度,“01”可以分配给速度,“10”可以分配给位移。
作为“参考值的样本数量”,存储在解码侧需要对原始信号进行积分运算的情况下使用的速度和位移中的每一个的参考值的样本数量。在该示例中,作为“参考值的样本数量”,存储了与可能在解码侧执行的积分运算的阶数相等的值;例如,如在第二示例中那样,在不对原始信号执行积分运算并且仅执行微分运算的情况下存储“0”,而如在第一示例中那样,在需要对原始信号进行二阶积分运算的情况下存储“2”。
作为“参考值”,存储在“参考值的样本数量”中存储的样本数量的参考值。这个“参考值”所需的比特长度由“原始信号的量化比特长度”和“参考值的样本数量”决定。例如,在原始信号的量化比特长度是八比特的情况下,参考值也被记录八比特,并且在“参考值的样本数量”是“2”的情况下,将16比特分配给“参考值”。此时,在“参考值”中,在需要二阶积分的情况下,参考值以速度参考值和位移参考值的顺序存储。
通过本实施例的编码,可以以具有上述数据结构的帧在时间方向上排列的模式来获得流数据。以这种流数据的模式记录并传输上述编码数据Dc。
注意,尽管省略了所示出的描述,但是在流数据中,实际数据区域中的数据实际上是交错的,以便为原始信号和差分信号中的每一个存储。
图5和图8所示的编码数据生成单元44和44A根据这种编码格式生成编码数据Dc。
[4-4.解码侧的功能配置]
随后,参照图10的功能框图描述关于再现装置3的编码数据Dc的解码的功能配置。
如图10所示,再现装置3具有获取处理单元F1和解码处理单元F2的功能,以作为关于编码数据Dc的解码的功能。
获取处理单元F1获取编码数据Dc,该编码数据Dc通过利用表示不同物理量的多个触觉信号的物理量之间的相互转换特性来执行编码以压缩信息量而生成。
在该实施例中,获取处理单元F1的功能与通信单元36和介质驱动器37获取编码数据Dc的功能相对应。
解码处理单元F2解码由获取处理单元F1获取的编码数据Dc,以获得触觉信号。在本实施例中,解码处理单元F2的功能由解码单元34实现。
在此处,在该实施例中,编码数据Dc包括特定信号(原始信号)和误差信息,该特定信号是表示特定物理量的触觉信号,该误差信息指示当特定信号被转换成表示另一物理量的信号时的转换误差。
然后,解码处理单元F2将特定信号转换成表示另一物理量的触觉信号,并基于误差信息校正转换后的触觉信号。
具体地,在该实施例中,上述误差信息是指示特定信号与表示另一物理量的触觉信号之间的差值的差分信息(差分信号)。
如上所述,通过将特定信号转换成表示另一物理量的触觉信号并基于误差信息校正转换后的触觉信号,对于表示除特定信号的物理量(表示为“特定物理量”)(第一示例中的位移信号和第二示例中的加速度信号)之外的物理量的触觉信号,编码数据Dc不必包括信号本身。然后,通过基于上述误差信息执行校正,可以正确地获得表示除特定物理量之外的物理量的触觉信号。
因此,可以减少触觉呈现所需的数据量,同时实现正确的触觉再现。
此外,因为误差信息是差分信号,所以关于特定信号的转换信号的误差校正可以通过将由差分信息指示的差值添加到特定信号的转换信号的简单处理来实现,从而可以减少在实现转换误差的校正时的处理负荷。
此外,在该实施例中,编码数据Dc包括用于识别由特定信号表示的物理量的识别信息(原始信号的物理量ID),并且解码处理单元F2基于该识别信息进行解码。
因此,当指定特定信号的物理量时,变得没有必要对特定信号执行信号分析,并且可以减少解码的处理负荷。
此外,在本实施例中,在基于识别信息指定的特定信号的物理量与预定物理量一致的情况下,解码处理单元F2输出特定信号。
另一方面,在基于识别信息指定的特定信号的物理量与预定物理量不一致的情况下,解码处理单元F2将特定信号转换成表示预定物理量的信号,并基于误差信息校正转换后的信号,以输出。
因此,可以基于与特定信号的物理量与触觉呈现装置6所对应的物理量一致的情况相对应的特定信号,来适当地驱动触觉呈现装置6,并且在特定信号的物理量与触觉呈现装置6所对应的物理量不一致的情况下,通过基于误差信息校正特定信号的转换信号而获得的信号,来适当地驱动触觉呈现装置6。
因此,可以适当地驱动与不同物理量相对应的不同类型的触觉呈现装置6。
[4-5.解码侧过程]
图11是示出应该被执行以用于实现作为上述实施例的解码功能的具体过程的流程图。
注意,解码单元34对编码数据Dc的每一帧执行图11所示的处理。
在此处,在图11中,假设编码数据Dc包括两种类型的差分信号,作为差分信号,以便能够支持触觉呈现装置6,而不管触觉呈现装置6所对应的加速度、速度和位移之外的物理量。
具体地,在如第一示例中那样原始信号是加速度信号的情况下,作为差分信号,用于能够对速度信号进行解码的差分信号以及用于能够对第一示例中示出的位移信号进行解码的差分信号包括在编码数据Dc中。在第一示例的情况下,在记录环境中,与第一触觉传感器5-1和第二触觉传感器5-2分开设置的速度传感器的检测信号被输入到编码装置2,并且获得用于能够对速度信号进行解码的差分信号,作为速度传感器的检测信号与作为加速度信号的一阶积分的速度转换信号(通过基于一阶积分运算的结果和速度参考值将加速度信号转换成速度而获得的信号)之间的差的信号。
此外,在如第二示例中那样原始信号是位移信号的情况下,作为差分信号,用于能够对速度信号进行解码的差分信号以及用于能够对第二示例中示出的加速度信号进行解码的差分信号包括在编码数据Dc中。在记录环境中,速度传感器的检测信号被输入到编码装置2,并且获得在第二示例的情况下用于能够对速度信号进行解码的差分信号,作为速度传感器的检测信号与作为位移信号的一阶微分的速度转换信号之间的差的信号。
在图11中,解码单元34在步骤S101处指定原始信号和差分信号的物理量。具体地,基于存储在编码数据Dc的帧报头中的“原始信号的物理量ID”和“差分信号的物理量ID”,指定原始信号和差分信号的物理量。
在随后的步骤S102处,解码单元34指定驱动触觉呈现装置6所需的物理量。注意,如果连接到再现装置3的触觉呈现装置6的类型是固定的,则可以省略步骤S102处的指定处理。
接下来,在步骤S103处,解码单元34确定所需物理量与原始信号的物理量是否彼此不同。在所需物理量与原始信号的物理量彼此并非不同的情况下,解码单元34前进到步骤S104,以选择原始信号,并且过程移到步骤S111。
在步骤S111,执行根据触觉呈现装置6调整信号电平以输出信号的过程。即,在过程从步骤S104移到步骤S111的情况下,解码单元34对原始信号执行信号电平的调整处理,并将其输出到图3所示的后处理单元33。在此处,如以上第二示例所示,在触觉呈现装置6具有大功率的情况下,通过增加幅度等来执行步骤S111的信号电平的调整。
解码单元34响应于步骤S111处的处理的执行,结束如图11所示的一系列处理。
如上所述,在触觉呈现装置6是对应于与原始信号的物理量相同的物理量的装置的情况下,基于原始信号驱动触觉呈现装置6。
另一方面,在步骤S103处确定所需物理量与原始信号的物理量彼此不同的情况下,解码单元34前进到步骤S105,并确定是否通过原始信号的积分运算获得所需物理量。
在确定通过原始信号的积分运算获得所需物理量的情况下,解码单元34前进到步骤S106,执行从积分运算和参考值转换目标信号的处理,然后在步骤S107处确定所需积分是否完成。
在如在第一示例所示的原始信号是加速度信号的情况下,在获得的物理量是位移的情况下或是速度的情况下中的每种情况下,执行步骤S106和S107处的处理。
具体地,在步骤S106处,首先,对作为加速度信号的原始信号执行一阶积分运算,并且基于操作结果和存储在编码数据Dc的帧报头中的“参考值”中的速度参考值,执行将原始信号转换成速度信号的处理。在后一种情况下,由于所需的积分是一阶,所以当步骤S106的处理执行一次时,在步骤S107处获得肯定的结果,并且过程移到步骤S110处的差分信号的添加。
另一方面,在前一种情况下,由于所需的积分是二阶,所以当步骤S106处的处理执行一次时,在步骤S107处获得否定的结果,并且再次执行步骤S106处的处理。在以这种方式再次执行的步骤S106中,执行通过积分运算将在第一转换处理中获得的信号(速度信号)和参考值进行转换的处理。具体地,对在第一转换处理中获得的速度信号执行一阶积分运算,并且执行基于运算结果和存储在编码数据Dc的帧报头中的“参考值”中的位移参考值来将该速度信号转换成位移信号的处理。
在前一种情况下,在通过这种转换处理获得位移信号之后,在步骤S110,过程移到差分信号的添加。
此外,在上述步骤105中确定不通过原始信号的积分运算获得所需物理量的情况下,解码单元34前进到步骤S108,通过微分运算转换目标信号,并且在步骤S109中确定是否结束所需微分。
在如第二示例中原始信号是位移信号的情况下,在所需物理量是加速度的情况且和是速度的情况中的每一种情况下执行步骤S108和S109的处理。
具体地,在步骤S108,首先,通过一阶微分运算将作为位移信号的原始信号转换成速度信号。在后一种情况下,由于所需的微分是一阶,所以当步骤S108的处理执行一次时,在步骤S109获得肯定的结果,并且过程移到步骤S110处的差分信号的添加。
另一方面,在前一种情况下,由于所需的微分是二阶,所以当步骤S107处的处理执行一次时,在步骤S109获得否定的结果,并且再次执行步骤S108的处理。在以这种方式再次执行的步骤S108中,对在第一转换处理中获得的速度信号再次执行一阶微分运算,并且执行到位移信号的转换。在前一种情况下,当再次执行转换处理时,在步骤S109获得肯定的结果,并且过程移到步骤S110处的差分信号的添加。
在步骤S110,解码单元34将差分信号添加到目标信号。具体地,存储在编码数据Dc中的相应差分信号添加到作为通过上述步骤S106和S107的处理而获得的位移信号或速度信号的转换信号或者作为在步骤S108和S109处获得的位移信号或速度信号的转换信号。
解码单元34响应于步骤S110的添加处理的执行,前进到上述步骤S111。
因此,在触觉呈现装置6是对应于与原始信号的物理量不同的物理量的装置的情况下,可以基于通过将原始信号转换成对应的物理量并通过差分信号适当地校正转换误差而获得的信号,来驱动触觉呈现装置6。
<5.变体>
在此处,编码数据Dc中包括的原始信号是加速度信号和位移信号中的任何一个的示例在上面被描述为触觉呈现装置6可以支持任何类型的加速度驱动、速度驱动和位移驱动的示例,原始信号也可以是速度信号。在这种情况下,在编码数据Dc中,存储位移参考值作为参考值,并且作为指示转换误差的误差信息,存储指示从速度到位移的转换误差的信息和指示从速度到加速度的转换误差的信息。通过对速度信号的一阶积分和使用参考值的转换获得位移信号,并且通过对速度信号的一阶微分获得加速度信号。
此外,尽管上面描述了通过在加速度、速度和位移之间的微积分运算来利用转换属性的示例,但是该示例不限于微积分,并且可以通过相互可转换的物理量之间的类似过程来执行编码和解码。
参考图12的流程图,描述了对表示物理量的多个信号进行编码的过程,物理量最多可以通过二阶微积分运算相互转换,而不具体限制物理量。
图12所示的处理由编码单元24执行。此外,在图12所示的过程中,如图1所示,假设第一触觉传感器5-1和第二触觉传感器5-2的两个系统的触觉信号(即,表示彼此不同的物理量的触觉信号)被输入到编码装置2。
注意,对每个预定块大小(对于一帧的每个样本数量),重复执行步骤S202至S211的处理。
在图12中,编码单元24首先在步骤S201确定要成为原始信号的信号以及与原始信号有差异的信号。即,关于由第一触觉传感器5-1和第二触觉传感器5-2检测的触觉信号,确定哪个是“原始信号”,并且哪个是“获得其差分的信号”。
该确定标准可以促使表示更可能被呈现的物理量的信号被选择为原始信号,或者基于每个信号的动态范围来选择该信号(选择以使得原始信号的数据量变小)。
在随后的步骤S202,编码单元24确定获得其差分的信号的物理量是否可以通过原始信号的积分运算获得。例如,在如上述第一示例中那样获得其差分的信号的物理量是位移并且原始信号的物理量是加速度的情况下,获得肯定结果,即可以通过原始信号的积分运算获取获得其差分的信号的物理量。
注意,步骤S202处的确定处理也可以通过准备定义用于记录每个物理量的通道的格式,根据数学知识来执行。可替代地,这也可以基于每个信号的频率分析结果来执行。例如,在获得原始信号在频率轴上线性衰减的频率分析结果的情况下,可以认为原始信号表示通过积分运算获得的物理量。
在步骤S202处,在获得了不能通过原始信号的积分运算获得其差分的信号的物理量的否定结果的情况下,编码单元24前进到步骤S203,以计算目标信号的一阶微分,并在步骤S204处确定所需微分是否完成。
例如,如果所需微分是一阶,则在步骤S203处对原始信号执行一阶微分运算,在步骤S204处根据微分运算获得肯定的结果,并且过程移到步骤S205。
可替代地,如果所需微分是二阶,则执行两次步骤S203处的微分。第一次,对原始信号执行一阶微分运算,第二次,对通过一阶微分运算获得的信号执行一阶微分运算。然后,在步骤S204处获得肯定的结果,并且过程移到步骤S205。
在此处,所需微分是一阶的情况与例如原始信号是位移并且获得其差分的信号是速度的情况以及原始信号是速度并且获得其差分的信号是加速度的情况相对应。此外,所需微分是二阶微分的情况与例如原始信号是位移并且获得其差分的信号是加速度的情况相对应。
在步骤S205,编码单元24计算通过上述步骤S203和S204的处理获得的微分信号与获得其差分的信号之间的差分信号,并且前进到步骤S212。
因此,例如,如在第二示例中,在原始信号是位移并且获得其差分的信号是加速度的情况下,可以将原始信号=位移信号并且差分信号=位移的差分信号与加速度信号之间的差分信号存储在编码数据Dc中。
在步骤S212,编码单元24确定编码是否结束。即,确定是否建立了编码的结束条件;例如,要编码的信号的输入被中断等。当编码结束时,编码单元24结束图12所示的一系列处理,并且当编码未结束时,过程返回到步骤S202。
此外,在上述步骤S202,在获得通过原始信号的积分运算可以获取获得其差分的信号的物理量的肯定结果的情况下,编码单元24前进到步骤S206,并且确定是否检测到要获得的积分信号的参考值。利用稍后描述的步骤S210处的确定处理,步骤S206处的处理可以执行最多两次(每帧最多两次)。
在此处,“要获得的积分信号”对应于例如在第一步骤S206与加速度(原始信号)相对应的一阶积分的速度信号,并且对应于在所需积分是二阶的情况下在第二步骤S206处与通过第一次积分获得的速度信号的一阶积分相对应的位移信号。此外,当所需积分为一阶时,“要获得的积分信号”对应于例如当原始信号是加速度信号时与加速度信号的一阶积分相对应的速度信号,并且对应于当原始信号是速度信号时与速度信号的一阶积分相对应的位移信号。
“检测到要获得的积分信号的参考值”这一事实意味着“相应的传感器检测到要获得的积分信号的参考值”。例如,在原始信号是加速度信号并且获得其差分的信号是位移信号的情况下,如在第一示例中那样,并且在相应的传感器仅仅检测到将加速度信号转换成位移所需的速度参考值和位移参考值之外的位移的情况下,第一步骤S206(即,在“要获得的积分信号”是速度信号的情况下)不与“检测到要获得的积分信号的参考值”这一事实相对应,而第二步骤S206(在“要获得的积分信号”是位移信号的情况下)与“检测到要获得的积分信号的参考值”这一事实相对应。
可替代地,在原始信号是速度信号并且获得其差分的信号是位移信号的情况下,在相应的传感器检测到将原始信号转换成位移信号所需的位移参考值的情况下,这与“检测到要获得的积分信号的参考值”这一事实相对应。
在步骤S206中获得未检测到要获得的积分信号的参考值的否定结果的情况下,编码单元24在步骤S207中从信号的多个样本之间的差值获取参考值,该信号比获得其差分的信号低一阶。这对应于例如在第一示例中图5所示的速度参考值计算单元43基于位移信号(获得其差分的信号)计算速度参考值,以获得。
此外,在步骤S206获得检测到要获得的积分信号的参考值的肯定结果的情况下,编码单元24在步骤S208从获得其差分的信号获得参考值。
编码单元24响应于步骤S207或S208处的处理的执行而前进到步骤S209,并且通过一阶积分来执行转换。
即,例如,在“要获得的积分信号”是速度信号的情况下,使用由步骤S207和S208中的相应处理获得的参考值通过一阶积分来转换加速度信号。此外,在“要获得的积分信号”是位移信号的情况下,使用由步骤S207和S208中的相应处理获得的参考值通过一阶积分来转换速度信号。
接下来,在步骤S210,编码单元24确定所需的积分是否完成。如果所需的积分未完成,则编码单元24返回到步骤S206,并且如果所需的积分完成,则过程移到步骤S211。
为了确认,所需积分是一阶的情况与例如原始信号是加速度并且获得其差分的信号是速度的情况以及原始信号是速度并且获得其差分的信号是位移的情况相对应。此外,所需积分是二阶的情况与例如原始信号是加速度并且获得其差分的信号是位移的情况相对应。
如果在步骤S210处完成了所需的积分,则编码单元24前进到步骤S211,以计算积分信号与获得其差分的信号之间的差分信号,并前进到上述步骤S212。注意,在步骤S210处,“积分信号”是指完成所需积分的原始信号。
通过上述处理,可以执行编码,以压缩表示物理量的多个信号上的信息量,物理量可以通过二阶微积分运算最大限度地彼此转换。
在此处,在编码中,由于与整个信号相比动态范围更小,并且压缩信息量的效果变得更大,所以差分信号可以具有更短的码长。基于此,可以在步骤S201选择原始信号,使得差分信号的动态范围变小。
此外,还可以将获得的差分信号与“获得其差分的信号”进行比较,并进行反馈,使得差分信号由于时移等而变小。
注意,转换误差可以简单地是从“获得其差分的信号”开始的时间延迟,因此,在这种情况下,通过使误差信息成为时间延迟的信息,可以进一步减少信息量。
此外,根据信号的性质,原始信号可以偏置,以便减小差分信号。例如,在加速度是原始信号而位移是差分信号的情况下,可以预期,通过从比较差分信号和“获得其差分的信号”的结果向加速度施加非常小的偏置,可以减小差分信号的动态范围。
<6.实施例的概要>
如上所述,作为实施例的编码装置(2)设置有编码单元(24),该编码单元(24)通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而生成编码数据。
这使得可以在通过利用物理量之间的相互转换特性来压缩信息量的同时,获得表示可执行相互转换的范围内的期望物理量的触觉信号。
因此,可以减少触觉呈现所需的数据量,同时能够驱动与不同物理量相对应的不同类型的触觉呈现装置。
在根据上述本技术的编码装置中,编码单元理想地允许编码数据包括作为表示特定物理量的触觉信号的特定信号和表示在特定信号被转换成表示另一物理量的触觉信号时的转换误差的误差信息。
因此,解码侧可以通过基于误差信息校正通过特定信号的物理量转换获得的信号,来正确地获得表示除了特定信号的物理量(特定物理量)之外的物理量的触觉信号。因此,编码数据不必包括表示除特定物理量之外的物理量的触觉信号本身。
因此,可以减少触觉呈现所需的数据量,同时实现正确的触觉再现。
在根据上述本技术的编码装置中,期望编码单元允许编码数据包括指示特定信号与表示另一物理量的触觉信号之间的差值的差分信息,作为误差信息。
因此,对特定信号的转换信号的误差校正可以通过将由差分信息指示的差值添加到特定信号的转换信号的简单处理来实现。
因此,当实现转换误差的校正时,可以减少处理负荷。
在根据上述本技术的编码装置中,期望编码单元允许编码数据包括用于识别由特定信号表示的物理量的识别信息,作为误差信息。
因此,当在解码侧指定特定信号的物理量时,变得没有必要对特定信号执行信号分析。
因此,可以降低解码的处理负荷。
在根据上述本技术的编码装置中,期望编码单元通过利用微积分的相互转换特性作为编码来执行编码以压缩信息量。
因此,在解码侧,可以基于编码数据获得表示位移、速度和加速度之外的期望物理量的触觉信号。
因此,可以实现能够执行触觉呈现的系统,而不管触觉呈现装置对应的位移、速度和加速度之外的物理量。
如上所述,作为实施例的解码装置(再现装置3)设置有解码单元(解码处理单元F2、解码单元34),该解码单元对编码数据进行解码,以获得触觉信号,通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码以压缩信息量从而生成该编码数据。
这使得有可能在通过利用物理量之间的相互转换特性来压缩信息量的同时,获得表示可执行相互转换的范围内的期望物理量的触觉信号。
因此,可以减少触觉呈现所需的数据量,同时能够驱动与不同物理量相对应的不同类型的触觉呈现装置。
此外,在作为实施例的解码装置中,编码数据包括特定信号和误差信息,该特定信号是表示特定物理量的触觉信号,该误差信息指示当特定信号被转换成表示另一物理量的触觉信号时的转换误差,并且解码单元将特定信号转换成表示另一物理量的触觉信号,并且基于误差信息校正转换后的触觉信号。
因此,对于表示除了特定信号的物理量(特定物理量)之外的物理量的触觉信号,编码数据不必包括信号本身。此时,由于基于误差信息校正通过特定信号的物理量转换获得的信号,所以变得可以正确地获得表示除了特定物理量之外的物理量的触觉信号。
因此,可以减少触觉呈现所需的数据量,同时实现正确的触觉再现。
此外,在作为实施例的解码装置中,使误差信息是表示特定信号与表示另一物理量的触觉信号之间的差值的差分信息。
因此,对特定信号的转换信号的误差校正可以通过将由差分信息指示的差值添加到特定信号的转换信号的简单处理来实现。
因此,当实现转换误差的校正时,可以减少处理负荷。
此外,在作为实施例的解码装置中,编码数据包括用于识别由特定信号表示的物理量的识别信息,并且解码单元基于识别信息执行解码。
因此,当指定特定信号的物理量时,变得没有必要对特定信号执行信号分析。
因此,可以减少解码的处理负荷。
此外,在作为实施例的解码装置中,在基于识别信息指定的特定信号的物理量与预定物理量一致的情况下,解码单元输出特定信号。
因此,可以基于与特定信号的物理量与触觉呈现装置所对应的物理量一致的情况相对应的特定信号,来适当地驱动触觉呈现装置。
因此,可以执行适当的触觉呈现。
此外,在作为实施例的解码装置中,在基于识别信息指定的特定信号的物理量与预定物理量不一致的情况下,解码单元将特定信号转换成表示预定物理量的信号,并基于误差信息校正转换后的信号,以输出。
因此,可以通过基于与特定信号的物理量与触觉呈现装置对应的物理量不一致的情况相对应的误差信息校正特定信号的转换信号而获得的信号,来适当地驱动触觉呈现装置。
因此,可以执行适当的触觉呈现。
此外,在作为实施例的解码装置中,解码单元对编码数据进行解码,通过利用微积分的相互转换特性以压缩信息量来执行编码,从而生成该编码数据。
因此,可以基于编码数据获得表示位移、速度和加速度之外的期望物理量的触觉信号。
因此,可以实现能够执行触觉呈现的系统,而不管触觉呈现装置对应的位移、速度和加速度之外的物理量。
此外,在作为实施例的解码装置中,解码单元调整通过解码而获得的触觉信号的幅度。
这使得可以根据基于触觉信号驱动的触觉呈现装置的类型来适当地调整触觉信号的幅度的大小。
因此,可以实现适当的触觉呈现。
此外,作为实施例的解码方法是对编码数据进行解码以获得触觉信号的解码方法,通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码以压缩信息量从而生成该编码数据。
通过作为实施例的这种解码方法,可以获得与作为上述实施例的解码装置的动作和效果类似的动作和效果。
在此处,到目前为止描述的编码单元(24)和解码处理单元(F2)的功能可以作为由CPU等进行的软件处理来实现。基于程序来执行软件处理,并且该程序存储在例如CPU的计算机装置(信息处理装置)可读的存储装置中。
作为实施例的编码侧的程序是一种程序,该程序使信息处理装置实现以下功能:通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码以压缩信息量,从而生成编码数据。
通过这样的程序,可以实现作为上述实施例的编码装置。
此外,作为实施例的解码侧的程序是一种程序,该程序使信息处理装置实现通过对编码数据进行解码来获得触觉信号的功能,通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码以压缩信息量从而生成该编码数据。
通过这样的程序,可以实现作为上述实施例的解码装置。
注意,本说明书中描述的效果仅是说明性的;效果不限于此,还可以具有另一种效果。
<7.本技术>
注意,本技术也可以具有以下配置。
(1)一种编码装置,设置有:
编码单元,通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而生成编码数据。
(2)根据上述(1)的编码装置,
其中,编码单元允许编码数据包括特定信号和误差信息,该特定信号是表示特定物理量的触觉信号,该误差信息指示当特定信号被转换成表示另一物理量的触觉信号时的转换误差。
(3)根据上述(2)的编码装置,
其中,编码单元允许编码数据包括指示特定信号与表示另一物理量的触觉信号之间的差值的差分信息,作为误差信息。
(4)根据上述(2)或(3)的编码装置,
其中,编码单元允许编码数据包括用于识别由特定信号表示的物理量的识别信息,作为误差信息。
(5)根据上述(1)至(4)中任一项的编码装置,
其中,作为编码,编码单元通过利用微积分的相互转换特性来执行编码,以压缩信息量。
(6)一种解码装置,包括:
解码单元,对编码数据进行解码,以获得触觉信号,通过利用物理量之间的相互转换特性,对表示不同物理量的多个触觉信号执行编码,以压缩信息量,从而生成该编码数据。
(7)根据上述(6)的解码装置,
其中,编码数据包括特定信号和误差信息,该特定信号是表示特定物理量的触觉信号,该误差信息指示当特定信号被转换成表示另一物理量的触觉信号时的转换误差,并且
解码单元将特定信号转换成表示另一物理量的触觉信号,并基于误差信息校正转换后的触觉信号。
(8)根据上述(7)的解码装置,
其中,误差信息是指示特定信号与表示另一物理量的触觉信号之间的差值的差分信息。
(9)根据上述(7)或(8)的解码装置,
其中,编码数据包括用于识别由特定信号表示的物理量的识别信息,并且
解码单元基于识别信息执行解码。
(10)根据上述(9)的解码装置,
其中,在基于识别信息指定的特定信号的物理量与预定物理量一致的情况下,解码单元输出特定信号。
(11)根据上述(9)或(10)的解码装置,
其中,在基于识别信息指定的特定信号的物理量与预定物理量不一致的情况下,解码单元将特定信号转换成表示预定物理量的信号,并基于误差信息校正转换后的信号,以输出。
(12)根据上述(6)至(11)中任一项的解码装置,
其中,解码单元对编码数据进行解码,通过利用微积分的相互转换特性执行编码,以压缩信息量,从而生成该编码数据。
(13)根据上述(6)至(12)中任一项的解码装置,
其中,解码单元调整通过解码获得的触觉信号的幅度。
附图标记列表
1 触觉再现系统
2 编码装置
3 再现装置
5-1 第一触觉传感器
5-2 第二触觉传感器
6 触觉呈现装置
Dc 编码数据
24 编码单元
24a 信号分析单元
24b 编码数据生成单元
34 解码单元
36 通信单元
37 介质驱动器
40 二阶积分单元
41、41A 差分计算单元
42 位移参考值获取单元
43 速度参考值计算单元
44、44A 编码数据生成单元
45 二阶微分单元
F1 获取处理单元
F2 解码处理单元。
- 动态图像编码装置、动态图像编码方法、动态图像编码程序、动态图像解码装置、动态图像解码方法、动态图像解码程序、动态图像再编码装置、动态图像再编码方法、动态图像再编码程序
- 图像编码装置、图像解码装置、图像编码方法、图像解码方法、图像编码程序、图像解码程序、以及记录了图像编码程序的计算机可读记录介质、记录了图像解码程序的计算机可读记录介质