混合动力汽车后桥离合器控制的方法
文献发布时间:2023-06-19 09:46:20
技术领域
本发明属于离合器控制技术领域,具体涉及一种混合动力汽车后桥离合器控制的方法。
背景技术
很多电动车和混合动力汽车的换挡机构在结构上取消了传统变速箱的同步器,一般依靠电机调速实现下一个目标挡位齿轮转速的同步,进而完成换挡。
换挡过程控制是为了避免车辆在换挡过程中出现顿挫、打齿、动力长时间丢失等现象、确保整车的平顺性和舒适性的同时可以延长相关零部件的使用寿命。
当前车辆在换挡过程仍存在以下问题:电机调速时,未对调速扭矩限制,会导致车辆在部分工况下换挡冲击过大,甚至出现明显的打齿声,影响整车的平顺性和乘车的舒适性。另外,车辆基于对高转速时电机保护的考虑,需要在高车速执行退挡过程。当实际挡位处于空挡时,此时电机处于自由状态,会较长时间处于高转速区,导致电机机械损耗磨损较大,影响电机的使用寿命。
因此,有必要开发一种新的混合动力汽车后桥离合器控制的方法。
发明内容
本发明提供一种混合动力汽车后桥离合器控制的方法,能提升整车的驾驶性,减少换挡时间,以及确保换挡过程的平顺性。
本发明所述的混合动力汽车后桥离合器控制的方法,包括以下步骤:
S1:动力总成控制器实时采集车辆的车速信号、前桥变速器实际挡位信号、混动模式信号和四驱模式信号;
S2:动力总成控制器根据步骤S1中采集到的数据判定是否需要进入后桥换挡,若否,则返回步骤S1,若是,发出相应的换挡请求,并进入步骤S3;
S3:根据相应的换挡请求判定是否执行相应的后驱动电机卸扭过程,若需要执行后驱动电机卸扭,则在后驱动电机实际扭矩达到零扭矩附近,再开始执行换挡过程;若不需要执行后驱动电机卸扭,则根据相应的换挡请求判定直接开始执行换挡过程;
S4:动力总成控制器根据相应的换挡请求判定后驱动电机模式请求,换挡执行机构是否执行;
S5:若挂挡成功,后驱动电机进入扭矩模式,并执行后驱动电机分配的驾驶员需求扭矩;若退挡成功,后驱动电机进入待机状态。
进一步,所述步骤S3包括:
S31:动力总成控制器判定是否为后桥退挡请求,若是退挡请求,进入步骤S32,若是挂挡请求,进入步骤S34;
S32:动力总成控制器发送给后驱动电机目标零扭矩,不再执行后驱动电机分配的驾驶员需求扭矩;
S33:当动力总成控制器检测到后桥驱动电机实际扭矩降为零扭矩附近,进入步骤S34;
S34:开始执行换挡过程。
进一步,所述步骤S4包括:
所述步骤S4包括:
S41:当动力总成控制器检测到车辆处于静止状态且出现挂挡请求时,换挡执行机构将后桥当前挡位推入目标挡位;
当挂挡时间超过预设时间阈值且挂挡仍未成功时,请求后驱动电机进入转速模式,并发出目标转速,后驱动电机进入转速模式,进行调速;
当在预设时间阈值内挂挡成功,则判断挂挡成功;
S42:当动力总成控制器检测到车辆处于非静止状态且出现挂挡请求时,请求后驱动电机进入转速模式,并发出目标转速;后驱动电机进入转速模式,进行调速;
当动力总成控制器检测到后驱动电机实际转速未达到目标转速时,继续调速;
当动力总成控制器检测到后驱动电机实际转速达到目标转速时,换挡执行机构将后桥当前挡位推入目标挡位,当判断后桥挡位为目标挡位时,判断挂挡成功;
S43:当动力总成控制器检测到出现退挡请求时,换挡执行机构将后桥挡位退至目标挡位;当动力总成控制器检测到后桥挡位为空挡且车辆处于静止状态,判定退挡成功;
当动力总成控制器检测到后桥挡位为空挡且后驱动电机实际转速大于预设转速阈值时,请求后驱动电机进入转速模式,并发出目标转速,直到后驱动电机实际转速达到目标转速,判定退挡成功;
当动力总成控制器检测到后桥挡位为空挡且后驱动电机实际转速小于等于预设转速阈值时,判断退挡成功。
进一步,所述步骤S2中,动力总成控制判定是否进入换挡条件包括四驱模式变化、车速变化、前桥变速箱实际挡位变化和混动模式变化。
进一步,所述步骤S32中,还包括,前桥发动机或前驱动电机执行动态补偿缓慢增加扭矩,使车辆所有动力源的总扭矩输出以最大程度满足驾驶员的需求扭矩。
进一步,所述步骤S33,动力总成控制器检测到后驱动电机实际扭矩在零扭矩附近后,后桥换挡机构和后桥驱动电机才执行后桥换挡请求。
进一步,所述步骤S41中,当挂挡时间超过预设时间阈值且挂挡仍未成功时,动力总成控制器请求后驱动电机进入转速模式,并发出较小的目标转速,转速模式不同扭矩限制与挂挡时车辆车速信号有关。
进一步,所述步骤S42中,动力总成控制器请求后驱动电机进入转速模式,并根据车辆车速信号、速比、前桥变速器实际挡位信号影响因子计算电机目标转速,转速模式不同扭矩限制与挂挡时车辆车速信号有关。
本发明具有以下优点:通过该混合动力汽车后桥离合器的控制,执行换挡动作前将后驱动电机扭矩卸载到零扭矩附近,同时使用前桥发动机和前驱动电机的扭矩补偿,最大限度地满足的驾驶员的扭矩需求,提升了整车的驾驶性。后驱动电机转速模式调速阶段,根据车辆运行工况,设置不同的扭矩限制。一方面能够实现电机达到目标转速的快速变化响应,减少换挡时间;另一方面避免换挡执行机构推动后桥挡位变化时,因电机实际扭矩较大带来的打齿、换挡冲击等不利因素,利于换挡过程平顺性。另外,车辆高速行驶时,后桥退至空挡后,将电机转速快速拉至低转速区,避免了电机较长时间运行在高转速区,能够减少对轴承等零部件的磨损,延长了后驱动电机的使用寿命。
附图说明
图1为本实施例的原理框图;
图2为本实施例的流程图;
图3为本实施例中步骤S3的流程图;
图4为本实施例中步骤S4中的执行挂挡的步骤流程图;
图5为本实施例中步骤S4中的执行退挡步骤流程图。
具体实施方式
下面结合附图对本发明作进一步说明。
如图1所示,本实施例中,一种混合动力汽车后桥离合器控制系统,包括动力总成控制器102、驱动电机控制器103、差速器总成104,其中差速器总成包括后驱动电机105、换挡控制机构106和离合器107。
动力总成控制器102、驱动电机控制器103通过CAN总线101相连和传输数据。驱动电机控制器103和差速器总成104通过高压线和通讯线束连接。动力总成控制器102和差速器总成104通过通讯线束连接。
动力总成控制器102主要用于采集车速信号、前桥变速器实际挡位信号影响因子、四驱模式信号、混动模式信号,判定后桥是否有换挡请求,同时对后驱动电机模式请求以及计算和发出后驱动电机的目标转速,也可以对换挡执行机构提出执行请求。
驱动电机控制器103主要作用是执行动力总成控制器发送到的控制指令,对驱动电机的模式和驱动电机转速根据目标转速进行精确调整。
减速器总成104主要包括后驱动电机105、换挡执行机构106和离合器107。换挡执行机构包括驱动电机或电磁铁,位置传感器和机械连接部分。位置传感器是通过信号线与动力总成控制器102相连,驱动电机可由整车低压系统提供电源,电磁铁可由动力总成控制器或后驱动电机控制器提供电源。
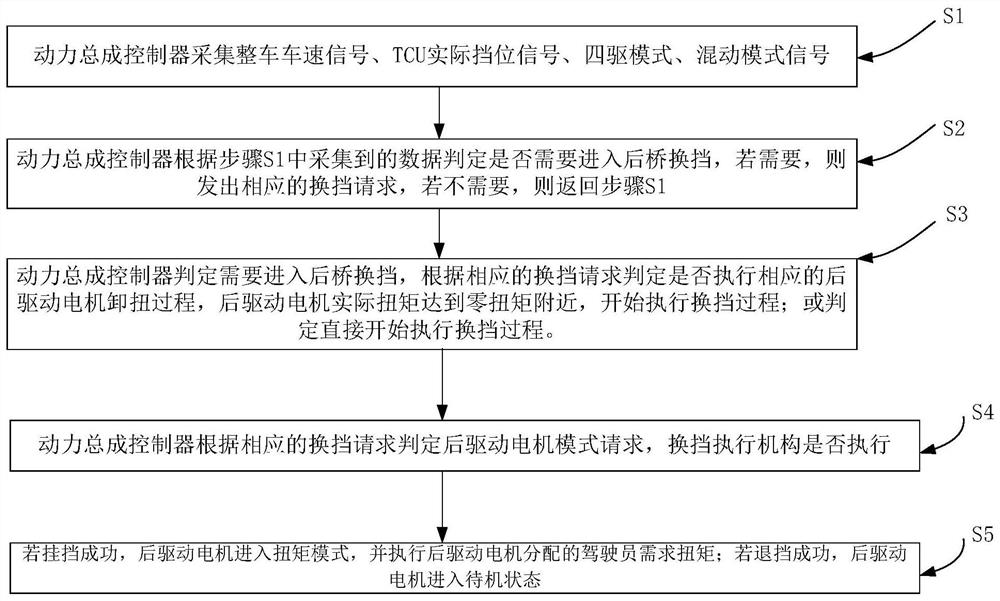
如图2所示,本实施例中,一种混合动力汽车后桥离合器控制的方法,包括以下步骤:
S1:动力总成控制器实时采集车辆的车速信号、前桥变速箱(简称TCU)实际挡位信号、混动模式信号和四驱模式信号;
S2:动力总成控制器根据步骤S1中采集到的数据判定是否需要进入后桥换挡,若否,则返回步骤S1,若是,发出相应的换挡请求,并进入步骤S3。
动力总成控制判定是否进入换挡条件包括四驱模式变化、车速变化、前桥变速箱实际挡位变化和混动模式变化。如四驱模式、EV模式等,动力总成控制器判定后桥挂挡请求。如两驱模式、车辆车速达到某个阈值、前桥变速器实际挡位为空档等,动力总成控制器判定后桥退挡请求。后桥换挡请求根据车辆车速状态分为静态挂挡、静态退挡、动态挂挡、动态退挡四种换挡请求。
S3:根据相应的换挡请求判定是否执行相应的后驱动电机卸扭过程,若需要执行后驱动电机卸扭,则在后驱动电机实际扭矩达到零扭矩附近,再开始执行换挡过程;若不需要执行后驱动电机卸扭,则根据相应的换挡请求判定直接开始执行换挡过程。
如图3所示,步骤S3具体包括:
S31:动力总成控制器判定是否为后桥退挡请求,若是退挡请求,进入步骤S32,若是挂挡请求,进入步骤S34。
S32:动力总成控制器发送给后驱动电机目标零扭矩,不再执行后驱动电机分配的驾驶员需求扭矩;该过程中,前桥发动机或前驱动电机执行动态补偿缓慢增加扭矩,使车辆所有动力源的总扭矩输出以最大程度满足驾驶员的需求扭矩。
S33:当动力总成控制器检测到后桥驱动电机实际扭矩降为零扭矩附近,如后驱动电机实际扭矩在[-3Nm,3Nm]范围内,即判定卸扭完成,进入步骤S34。
本实施例中,动力总成控制器检测到后驱动电机实际扭矩在零扭矩附近后,后桥换挡机构和后桥驱动电机才执行后桥换挡请求。
S34:后桥换挡请求为退挡请求且卸扭完成,或者后桥换挡请求为挂挡请求,开始执行换挡过程。
如图4所示,S4:动力总成控制器根据相应的换挡请求判定后驱动电机模式请求,换挡执行机构是否执行;具体为:
S41:当动力总成控制器检测到车辆处于静止状态且出现挂挡请求时,换挡执行机构将后桥当前挡位推入目标挡位;
当挂挡时间超过预设时间阈值且挂挡仍未成功时,请求后驱动电机进入转速模式,并发出较小的目标转速(如20rpm),后驱动电机进入转速模式,进行调速,在电机调速时换挡执行机构始终保持对后桥挡位的作用力。转速模式不同扭矩限制与挂挡时车辆车速信号有关,一般为车速越高,扭矩限制越大。
当在预设时间阈值内挂挡成功,则判断挂挡成功。
S42:当动力总成控制器检测到车辆处于非静止状态且出现挂挡请求时,请求后驱动电机进入转速模式,并发出驱动电机目标转速,目标转速根据车辆车速信号、速比、前桥变速器实际挡位信号影响因子计算得到,即后驱动电机目标转速RMotTgtSpd=车速VehSpd×速比r×前桥变速器挡位信号影响因子γ;后驱动电机进入转速模式,进行调速。转速模式不同扭矩限制与挂挡时车辆车速信号有关,一般为车速越高,扭矩限制越大。
当动力总成控制器检测到后驱动电机实际转速未达到目标转速时,继续调速。
当动力总成控制器检测到后驱动电机实际转速达到目标转速时(即当动力总成控制器检测到后驱动电机实际转速达到目标转速附近,如实际转速和目标转速差值在[-100rpm,100rpm]范围内,即判定后驱动电机达到目标转速),换挡执行机构将后桥当前挡位推入目标挡位,当判断后桥挡位为目标挡位时,判断挂挡成功。
如图5所示,S43:当动力总成控制器检测到出现退挡请求时,换挡执行机构将后桥挡位退至目标挡位;
当动力总成控制器检测到后桥挡位为空挡且后驱动电机实际转速大于预设转速阈值时,请求后驱动电机进入转速模式,并发出目标转速,直到后驱动电机实际转速达到目标转速,判定退挡成功。目标转速与电机实际转速方向有关,如电机正转,目标转速为50rpm;如电机反转,目标转速为-50rpm。转速模式下,不同扭矩限制与退挡时的车速信号有关,一般为车速越高,扭矩限制越大。
当动力总成控制器检测到后桥挡位为空挡且后驱动电机实际转速小于等于预设转速阈值时,判断退挡成功。
当动力总成控制器检测到后桥挡位为空挡且车辆处于静止状态,判定退挡成功。
S5:若挂挡成功,后驱动电机进入扭矩模式,并执行后驱动电机分配的驾驶员需求扭矩;若退挡成功,后驱动电机进入待机状态。
如表1所示,本实施例中,混合动力汽车后桥离合器的控制方法中驱动电机转速模式的车速变化与扭矩限制图;动力总成控制器请求后驱动电机进入转速控制模式,转速控制模式不同扭矩限制与换挡请求时车辆车速信号有关,一般的车速越高,扭矩限制越大。上述举例数值均可根据车辆状态进行标定。
表1
在动力总成控制器和后驱动控制器的控制下通过换挡执行机构完成换挡,后驱动电机在转速模式设置不同扭矩限制,一方面可实现快速换挡,另一方面减轻换挡过程中产生的换挡冲击;另外,后桥退至空挡时,主动降电机转速拉至低转速区,避免了后驱动电机长时间运行在高转速区,延长了电机使用寿命,解决了现有技术中出现的问题。
- 混合动力汽车后桥离合器控制的方法
- 一种基于电磁离合器的混合动力汽车离合器控制系统及控制方法