装载车辆而执行停车及发车的智能车辆转运机器人
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及在平面停车场上配置的车辆转运机器人,更详细地,涉及一种沿着平面停车场的停车线向前、后、左、右移动,并且,将车辆提升的状态下移动而向停放的车辆的上侧空间移送车辆,而执行车辆的停车及发车的车辆转运机器人。
背景技术
以往的平面停车场是在平整的地面上使用既定的涂料划分用于停放各个车辆的区域,既定的停车线形成一个停车单元。
并且,由多个所述停车单元相互邻接的方式连接而形成停车单元,所述停车单元的前面部之间形成有车辆的移动通路。
即,以往的平面停车场划分多个用于停放一台车辆的区域的停车单元,在包括多个邻接的停车单元的停车模块与所述停车模块之间形成有车辆的移动通路。
上述情况下,所述车辆的移动通路占据很多宝贵的土地资源,因此,存在降低相同面积的停车效率的问题。
并且,一般而言,在机械式停车场上,采用将车辆放置停车托盘后通过停车台上升后,在停车空间上与托盘一同停放的停车方式,因此,按照停车空间分别要具备停车托盘,从而,停车托盘安装费用较高,并且,在利用建筑物屋顶等停车空间停车时存在困难。
并且,为了使用形成有车辆装载台的停车台在屋顶等停车空间停车及发车,在停车空间上铺设固定轨道,在沿着该固定轨道向一个方向移送的水平移送棒上安装了停车台,因此,存在为了安装此类结构物需要进行很多的结构变更,并且,因停车空间的形态等无法能动性地停车的问题。
发明内容
发明要解决的技术问题
本发明为了解决上述的问题,在平面停车场配置车辆转运机器人,消除了车辆的移动通路,而增加对于相同面积的车辆的停车台数,从而,能够提高停车效率。
并且,本发明的目的为提供一种无需变更停车场的结构,无需设置以往的停车设施上安装的各种结构物,也能够装载放置在停车空间的车辆而能够自动地执行停车及发车的智能车辆转运机器人。
但,本发明的目的并非限定于上述说明的目的,本发明的技术领域的普通技术人员应当明确理解未说明的其他目的。
解决问题的技术方案
为了实现上述目的,本发明的车辆转运机器人10包括:框架部100,其包括:四个垂直框架110,其与地面垂直地配置,分隔既定距离而形成四角架子;上端框架120,其分别连接所述四个垂直框架110的上端部而形成四角形;驱动部200,其分别安装在所述垂直框架110的下端部,而用于移动所述框架部110;台架300,其安装在所述框架部100而用于装载车辆,
并且,所述框架部100借助于所述四个垂直框架110和地面及所述上端框架120之间的空间而形成左面和右面及前面和后面四个面,所述上端框架120区分为形成于所述左面和右面的两个长边上端框架121a,121b和形成于所述前面和后面的两个短边上端框架122a,122b。
并且,所述台架300分别配置在与所述车辆的前侧和后侧对应的所述框架部100的前面和后面,包括:装载部310,其向所述车辆的前侧和后侧移送而装载车辆;提升部320,其与所述框架部100结合而提升所述装载部310。
并且,所述提升部320包括:导引支撑台321,其分别在所述两个短边上端框架122a,122b下侧平行地配置;移送棒322,其在所述导引支撑台321两端结合;垂直导引棒323,其分别设置在所述垂直框架110内,并与所述移送棒322结合;升降驱动部(未图示),其驱动所述移送棒322使其沿着所述垂直导引棒323升/降。
并且,所述装载部310包括:轮子夹持部310a,其分别放置所述车辆的前轮和后轮并夹持;轮子夹持部驱动单元,其连接所述提升部320与轮子夹持部310a之间结合安装而移送所述轮子夹持部310a。
并且,所述轮子夹持部驱动单元包括:轮子夹持部前后进驱动部,其与所述提升部320的导引支撑台321结合,通过车辆前、后侧保险杠与地面之间的缝隙将所述轮子夹持部310a向车辆下侧移送;轮子夹持部垂直旋转驱动部,其将所述轮子夹持部310a由与地面形成直交的垂直方向旋转;第1连接部,其在所述轮子夹持部前后进驱动部与轮子夹持部垂直旋转驱动部之间形成而结合;第2连接部,其在所述轮子夹持部垂直旋转驱动部与轮子夹持部310a之间形成而结合。
并且,所述轮子夹持部310a包括:安装板314,其与所述第2连接部可旋转地结合;第1、2装载台315a,315b,其在所述安装板314上部左、右对称地结合,而放置车辆轮子。
并且,所述轮子夹持部前后进驱动部包括:第1、2水平移送轴311a,311b,其在所述提升部320的导引支撑台321上垂直地配置,而向下侧突出;第1、2移送支撑板312a,312b,其与所述第1、2水平移送轴311a,311b的上部一侧能够以轴为中心旋转地结合,而将第1、2水平移送轴311a,311b支撑在所述导引支撑台321上;水平驱动部(未图示),其将所述第1、2移送支撑板312a,312b沿着所述导引支撑台321分别由相反方向移送;第1旋转驱动部(未图示),其随着所述第1、2移送支撑板312a,312b的移动将所述第1、2水平移送轴311a,311b分别由相反方向旋转。
并且,所述第1连接部包括:第1及第2腔室连接部317a,317b,其固定结合所述第1、2水平移送轴311a,311b各个下部的另一侧。
并且,所述轮子夹持部垂直旋转驱动部还包括:第1及第2旋转轴313a,313b,其在所述第1及第2连接部各个侧部水平地形成,而能够以轴为中心旋转地结合一侧;第2旋转驱动部(未图示),其使所述第1及第2旋转轴313a,313b由垂直方向旋转,由此,将所述轮子夹持部310a向地面方向旋转,未向框架部100的内侧空间突出的状态下,使轮子夹持部310a升降。
并且,所述第2连接部包括:第1及第2铰链连接部318a,318b,分别固定结合在所述第1及第2旋转轴313a,313b的另一侧,而与所述安装板314铰链结合,由此,随着所述第1、2水平移送轴311a,311b的旋转,所述第1,2旋转轴313a,313b分别向所述车辆前、后侧旋转。
并且,所述轮子夹持部310a包括:夹持部件316,其在所述第1、2装载台315a,315b的各个上部可旋转地结合,且末端形成环形状以便能够夹持车辆轮子;装载台驱动部(未图示),其将所述第1、2装载台315a,315b向左、右两侧移送,而调整车辆轮子之间的宽幅。
并且,所述车辆转运机器人10还包括:支撑部400,其用于支撑向所述框架部100的上侧移送的所述轮子夹持部310a。
并且,所述支撑部400包括:外侧框架410,其配置在所述上端框架120的下侧且与所述垂直框架110的外侧结合;支撑台420,其可旋转地设置在所述外侧框架410,将车辆装载于所述装载部后上升时旋转,而支撑所述轮子夹持部310a。
并且,所述驱动部200包括:轮子210;轮子旋转电机,其向所述轮子210传送旋转力;方向转换电机,其用于转换所述轮子210的方向;方向转换模块,其根据所述方向转换电机的旋转角度而转换轮子的方向;固定托架220,其将所述驱动部200固定在所述垂直框架110。
并且,所述驱动部200还包括::折叠式辅助台260,其与所述固定托架220结合且形成多层而成为折叠式;副轮270,其在所述辅助台260的末端结合。
并且,所述车辆转运机器人10还可包括:传感器500,其在所述台架300上装载有车辆的状态下,识别在台架300下侧是否有车辆,用于在所述台架300上装载车辆时能够识别车辆与台架300之间的距离;控制部,其根据所述传感器500的信号而控制所述车辆转运机器人10的驱动。
并且,所述车辆转运机器人10还可包括:导轨123,其在所述上端框架120的内侧连续地单独设置,而用于移送所述传感器500;移送体124,其与所述传感器500结合而沿着所述导轨123移送。
本发明的特征及益处将通过依据附图的如下的详细说明而更加明确。
并且,在本说明书和权利要求中使用的术语或词语不能以通常性和词典性的意义解释,应当立足于发明人为了以最佳的方法说明其自身的发明而可能适当地定义术语概念的原则,以符合本发明的技术思想的意义和概念解释。
发明的效果
如上述说明,根据本发明具有如下效果:无需借助于另外的结构物或停车导引通路,即可在停车空间设置智能车辆转运机器人而能够有效地将车辆停车及发车。
附图说明
图1为概略表示根据一实施例的车辆转运机器人的平面图;
图2为概略表示根据一实施例的车辆转运机器人的侧面图;
图3为概略表示根据一实施例的车辆转运机器人的正面图;
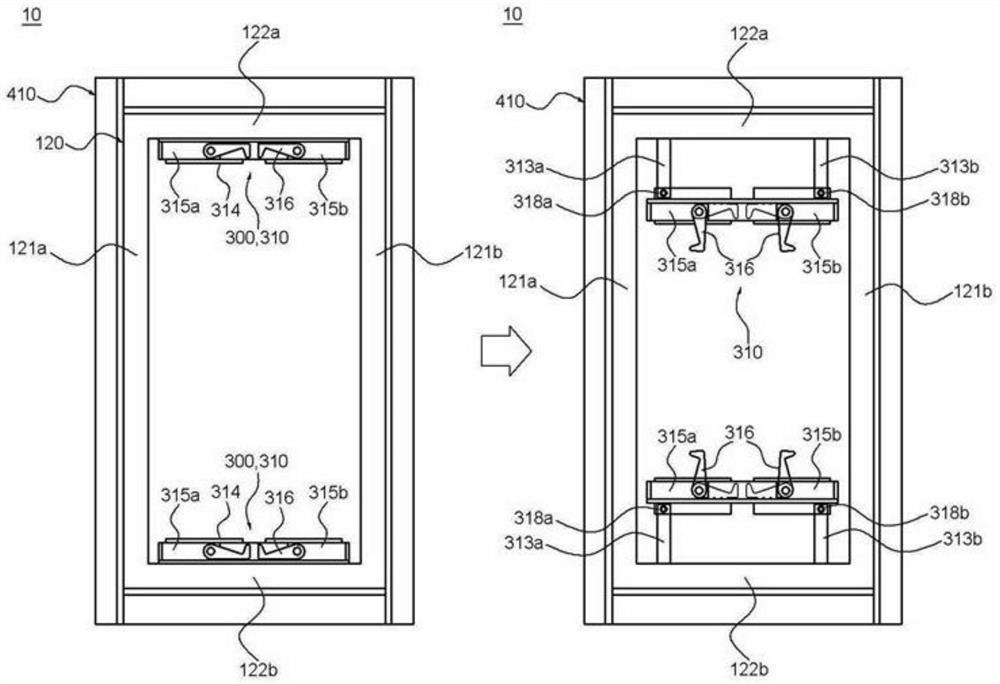
图4至8为概略表示根据一实施例的台架的运转状态的立体图;
图9为概略表示根据一实施例的副轮的驱动的侧面图;
图10为概略表示根据一实施例的传感器的驱动的平面图;
图11为概略表示本发明的一实施例的水平调节装置的侧面图。
附图标记说明
10:车辆转运机器人 100:框架部
110:垂直框架 120:上端框架
200:驱动部 210:轮子
220:固定托架 300:台架
310:装载部 320:提升部
400:支撑部 410:外侧框架
420:支撑台 500:传感器
最佳实施方式
以下参照附图说明本发明的优选实施例。此过程中,为了说明的明确性和便利性,在附图中表示的线的厚度或构成要素的大小等可夸张地图示。
并且,后述的术语是考虑到在本发明中的功能而定义的术语,可根据使用者、运用者的意图或惯例而不同。因此,对于此类术语的定义应基于本说明书的整体内容而下定义。
并且,下面的实施例并非限定本发明的权利范围,其只是在本发明的权利要求范围中提示的构成要素的示例性的事项,包含于本发明的说明书整体的技术思想并包括在权利要求的构成要素中可以均等物置换的构成要素的实施例属于本发明的权利范围。
附加的图1为概略表示根据一实施例的车辆转运机器人的平面图;图2为概略表示根据一实施例的车辆转运机器人的侧面图;图3为概略表示根据一实施例的车辆转运机器人的正面图;图4至8为概略表示根据一实施例的台架的运转状态的立体图;图9为概略表示根据一实施例的副轮的驱动的侧面图;图10为概略表示根据一实施例的传感器的驱动的平面图;图11为概略表示本发明的一实施例的水平调节装置的侧面图。
作为根据本发明的智能车辆转运机器人10的一实施例,以棋盘形状标示停车线而形成多个停车区域的停车场(未图示)上设有车辆转运机器人10。
在所述停车场标示有在一个平面上分别停放车辆的位置的停车线,并消除了车辆移动的车辆移动通路,而能够增加车辆的停车台数,并且,使用所述车辆转运机器人10移动在该停车场停放的车辆,而执行车辆的停车和发车作业。
此时,所述车辆转运机器人10沿着所述停车线向前、后、左、右移动而移送车辆,在所述停车区域停车或将在停车区域停放的车辆发车,并且,将所述车辆提升的状态下移动而将车辆向停放的车辆的上侧空间移送的方式进行所述车辆的停车及发车。
并且,在所述标记的停车线形成有使所述车辆转运机器人10移动时能够识别移动位置的位置标识(未图示),在所述车辆转运机器人10附着有能够感知所述位置标识的传感器(未图示),由此,通过所述传感器追踪位置标识而移动。
此时,优选地,所述位置标识为能够反射光的反射物质,或对电产生反应的金属物质,并且,所述传感器为通过发光部和受光部感知所述位置标识的光传感器,或发生磁场而感知所述金属物质的磁场传感器。
并且,所述车辆转运机器人10向通过所述停车线区分的各个停车单元赋予识别代码。
并且,在所述车辆转运机器人10可附着有用于确认车辆转运机器人的位置的标签。
并且,在所述车辆转运机器人10包括:车辆有无传感器(未图示),其用于判断在所述停车单元是否有车辆;输入部(未图示),其接收车辆的入车和发车信息输入;控制部(未图示),其分析通过所述输入部输入的信息后执行车辆的入车和发车;存储部(未图示),其存储在所述各个停车单元上停放的车辆的车辆牌号。
从而,在所述存储部根据与各个停车单元相应的识别代码单独存储是否有停放的车辆,而当使用者停放车辆时,通过所述存储部的存储信息向未停放车辆的停车单元移动所述车辆转运机器人10。
并且,所述车辆有无传感器可由另外的超音波传感器或图像传感器等形成,而根据所述车辆有无传感器的信号,停止在所述车辆转运机器人10上装载的车辆的卸货,从而,能够防止将车辆在停车的停车单元上重复停放而发生的事故。
并且,在所述停车场的地面上可设置用于防止所述车辆转运机器人10的脱离的导轨(未图示),或设置相比车辆的高度更高的导引杆(未图示)。
即,所述车辆转运机器人10通过停车管制系统或机器人自身的自动控制而自主运行,而执行车辆的停车及发车作业,并且,根据情况,由作业者通过远程操纵等直接地操纵驱动。
并且,并非在所述停车场上一定要标示停车线才能够使所述车辆转运机器人10运行,所述记载的停车线只是发明的一实施例。
并且,如图1所示,本发明的车辆转运机器人10包括:框架部100,其包括在地面上垂直地配置并分隔既定距离而形成四角架子的四个垂直框架110和分别连接所述四个垂直框架110的上端部而形成四角形的上端框架120;驱动部200,其分别设置在所述垂直框架110的下端部,而移动所述框架部110;台架300,其设置在所述框架部100而装载车辆。
从而,所述车辆转运机器人10在提升车辆的状态下,向前、后、左、右移动而向停放的车辆的上侧空间移送车辆的方式执行所述车辆的停车及发车作业。
此时,所述框架部100通过所述四个垂直框架110和地面及所述上端框架120之间空间而形成左面和右面及前面和后面四个面,所述上端框架120区分为形成于所述左面和右面的两个长边上端框架121a,121b和形成于所述前面和后面的两个短边上端框架122a,122b。
并且,所述车辆转运机器人10通过所述四个面经过在地面停放的车辆,而向停放的车辆的上侧空间移送车辆。
并且,所述台架300分别设置在与所述车辆的前侧和后侧对应的所述框架部100的前面和后面,包括:装载部310,其并向所述车辆的前侧和后侧移送而装载车辆;提升部320,其与所述框架部100结合而提升所述装载部310。
此时,所述提升部320包括:导引支撑台321,其分别在所述两个短边上端框架122a,122b下侧平行地配置;移送棒322,其在所述导引支撑台321两端结合;垂直导引棒323,其分别设置在所述垂直框架110内,并与所述移送棒322结合;升降驱动部(未图示),其驱动所述移送棒322使其沿着所述垂直导引棒323升/降。
并且,所述升降驱动部可为分别在所述两个短边上端框架122a,122b的上侧设置而利用与所述导引支撑台321或移送棒322连接安装的钢缆或链条的绞车或齿轮或螺旋千斤顶或液压装置。
即,作为所述升降驱动部的一实施例,在所述导引支撑台321的两侧或中心部可形成有链条或钢缆连接的环。
并且,在所述短边上端框架122a,122b的内侧或上端部形成有用于卷绕所述链条或钢缆的滑轮,并可形成有向所述滑轮传送旋转力的电机。
从而,随着所述滑轮的旋转,所述提升部320的所述水平移送棒322沿着所述垂直导引棒323而升降。
并且,所述提升部320还可形成有另外的安全装置,用于防止驱动部的故障及损伤引发的装载部310的坠落。
作为所述安全装置的一实施例,在所述水平移送棒322与垂直导引棒323之间形成有通过液压而运转的制动器,而在紧急时期运行所述制动器而控制导引支撑台321的驱动。
并且,在所述水平移送棒322与垂直导引棒323之间穿孔安全用孔而防止坠落,或适用安全带原理而防止所述导引支撑台321的坠落。
并且,所述装载部310包括:轮子夹持部310a,其分别放置所述车辆的前轮和后轮并夹持;轮子夹持部驱动单元,其连接所述提升部320与轮子夹持部310a之间结合安装,而移送所述轮子夹持部310a。
并且,所述轮子夹持部驱动单元包括:轮子夹持部前后进驱动部,其与所述导引支撑台321结合,通过车辆前、后侧保险杠与地面之间的缝隙将所述轮子夹持部310a向车辆下侧移送;轮子夹持部垂直旋转驱动部,其将所述轮子夹持部310a由与地面形成直交的垂直方向旋转;第1连接部,其在所述轮子夹持部前后进驱动部与轮子夹持部垂直旋转驱动部之间形成而结合;第2连接部,其在所述轮子夹持部垂直旋转驱动部与轮子夹持部310a之间形成而结合。
此时,所述轮子夹持部310a包括:安装板314,其与所述第2连接部可旋转地结合;第1、2装载台315a,315b,其在所述安装板314上部左、右对称地结合,而放置车辆轮子。
并且,所述轮子夹持部前后进驱动部包括:第1、2水平移送轴311a,311b,其在所述导引支撑台321上由垂直配置,而向下侧突出;第1、2移送支撑板312a,312b,其所述第1、2水平移送轴311a,311b的上部一侧能够以轴为中心旋转地结合,而将第1、2水平移送轴311a,311b支撑在所述导引支撑台321上;水平驱动部(未图示),其将所述第1、2移送支撑板312a,312b沿着所述导引支撑台321分别由相反方向移送;第1旋转驱动部(未图示),其随着所述第1、2移送支撑板312a,312b的移动将所述第1、2水平移送轴311a,311b分别由相反方向旋转。
并且,所述第1连接部包括:第1及第2腔室连接部317a,317b,其固定结合所述第1、2水平移送轴311a,311b的各个下部的另一侧。
并且,所述轮子夹持部垂直旋转驱动部还包括:第1及第2旋转轴313a,313b,其在所述第1及第2连接部各个侧部水平地形成,一侧能够以轴为中心旋转地结合;第2旋转驱动部(未图示),其使所述第1及第2旋转轴313a,313b由垂直方向旋转。
由此,使所述轮子夹持部310a向地面方向旋转,未向框架部100的内侧空间突出的状态下,使轮子夹持部310a升降。
即,所述第1及第2旋转轴313a,313b的一侧以轴承为媒介与所述第1及第2腔室连接部317a,317b结合,并且,在所述第1及第2铰链连接部318a,318b结合固定另一侧。
由此,通过所述第2旋转驱动部使所述第1及第2旋转轴313a,313b由垂直方向旋转,借助于上述的驱动,与所述第1及第2铰链连接部318a,318b连接结合的所述轮子夹持部310a也一同旋转。
并且,所述第1及第2旋转轴313a,313b可伸缩地形成。
并且,所述第2连接部包括:第1及第2铰链连接部318a,318b,其分别固定结合在所述第1及第2旋转轴313a,313b的另一侧,而与所述安装板314铰链结合。
由此,随着所述第1、2水平移送轴311a,311b的旋转,所述第1,2旋转轴313a,313b分别向所述车辆前、后侧旋转。
此时,优选地,所述水平驱动部和第1及第2旋转驱动部的动力源为电机,上述的动力源的构成是普通技术人员容易发明的构成,因此,省略详细的说明。
即,所述台架300的所述第1,2旋转轴313a,313b通过所述第1、2移送支撑板312a,312b的移动而旋转驱动,而使得所述装载部310分别向前方和后方移动。
并且,所述装载部310向车辆的前、后保险杠的下侧移动而支撑车辆的轮子并夹持后,通过所述提升部320向上部移动,由此,将车辆向停放的车辆的上侧空间移动,而执行停车及发车作业。
此时,优选地,在所述装载部310形成有用于防止所述第1、2水平移送轴311a,311b的旋转的另外的制动器装置。
并且,本发明的台架300的构成具有如下有益效果:在框架部100的左、右侧未安装形成有用于装载车辆后提升的另外的框架,因此,在通过车辆转运机器人10执行停车作业时,能够缩小车辆之间的间隔而紧密地停放,而提高相对于停车场的相同面积的停车效率。
并且,所述轮子夹持部310a包括:夹持部件316,其在所述第1、2装载台315a,315b的各个上部可旋转地结合,且末端形成环形状以便能够夹持车辆轮子;装载台驱动部(未图示),其将所述第1、2装载台315a,315b向左、右两侧移送,而调整车辆轮子之间的宽幅。
并且,所述安装板314和第1及第2装载台315a,315b可形成一体型或被两分而分别与所述第1及第2铰链连接部318a,318b结合的分离型。
并且,所述车辆转运机器人10还包括:支撑部400,其用于支撑向所述框架部100的上侧移送的所述轮子夹持部310a。
此时,所述支撑部400包括:外侧框架410,其配置在所述上端框架120的下侧且与所述垂直框架110的外侧结合;支撑台420,其可旋转地设置在所述外侧框架410,将车辆装载于所述装载部后上升时旋转,而支撑所述轮子夹持部310a。
并且,所述驱动部200分别配置在所述四个垂直框架110的下端,包括:轮子210;轮子旋转电机,其向所述轮子210传送旋转力;方向转换电机,其用于转换所述轮子210的方向;方向转换模块,其根据所述方向转换电机的旋转角度而转换轮子的方向;固定托架220,其将所述驱动部200固定在所述垂直框架110。
并且,所述驱动部200还包括::折叠式辅助台260,其与所述固定托架220结合且形成多层而成为折叠式;副轮270,其在所述辅助台260的末端结合。
并且,当车辆转运机器人10向左、右移动时,所述辅助台260向车辆转运机器人10的前面和后面侧方向以一字型展开,而能够提高稳定性。
并且,所述车辆转运机器人10还可包括:传感器500,其在所述台架300上装载有车辆的状态下,识别在台架300下侧是否有车辆,用于在所述台架300上装载车辆时能够识别车辆与台架300之间的距离;控制部,其根据所述传感器500的信号而控制所述车辆转运机器人10的驱动。
并且,所述车辆转运机器人10还可包括:导轨123,其在所述上端框架120的内侧连续地单独设置,而用于移送所述传感器500;移送体124,其与所述传感器500结合而沿着所述导轨123移送。
并且,所述车辆转运机器人10还可包括:发电装置(未图示),其利用装载车辆的装载部310的重量生成电的。
并且,可利用弹簧、发条、气压、液压装置等存储能源。
即,所述发电装置可利用所述装载部310下降时发生的位能而存储能源。
并且,参照图9,存在如下问题:即在所述台架300上装载车辆后反复地升降时,所述垂直框架110可能发生倾斜。
为了防止上述问题,可形成有水平调节装置600,并且,所述水平调节装置600形成于与两个长边上端框架121a,121b连接的垂直框架110a,110b之间,并且,在所述水平调节装置600的两侧形成有与所述垂直框架110a,110b连接的轴(shaft)。
并且,在所述水平调节装置600形成有将所述轴沿着长边长度方向移送的液压装置或驱动电机。
从而,通过所述水平调节装置600将所述轴沿着长边长度方向移送,而以推或拉所述垂直框架110a,110b的方式控制倾斜度。
并且,在所述垂直框架110a,110b形成有用于测定垂直框架110a,110b的倾斜度的另外的传感器,并且,还可形成有通过所述传感器的信号控制所述水平调节装置600的驱动的控制部。
即,所述水平调节装置600根据测定垂直框架110的倾斜度的倾斜度传感器(未图示)的信号运行并移送所述轴而控制所述垂直框架的倾斜度。
以上通过详细的实施例详细说明了本发明,但,其只是为了详细说明本发明,本发明并非限定于其,本发明的技术领域的普通技术人员可在本发明的技术思想范围内变形或改良本发明。
本发明的简单的变形至变更均属于本发明的范畴,本发明的具体的保护范围通过附加的权利要求范围而明确。
- 装载车辆而执行停车及发车的智能车辆转运机器人
- 用于执行机动车辆进入横向停车空间的停车过程的方法、停车辅助系统和机动车辆