一种基于激光雷达的自动消毒机
文献发布时间:2023-06-19 09:49:27
技术领域
本申请涉及消毒机技术领域,尤其涉及一种基于激光雷达的自动消毒机。
背景技术
目前已知的消毒机或者灭菌设备通常采用按键式触发或者遥控触发。其中按键式触发需要人员接触按钮,多人操作时存在交叉感染的风险,且按键式触发还存在无法智能开启和管理,不能监控消毒时长和有效性,浪费消毒资源;需要现场工作人员维护,人力成本高的问题。
遥控触发同样存在人员共同接触遥控器,易发生交叉感染;不能监控消毒时长和有效性;人力成本高的问题。
因此,人们需要一种能够自动触发消毒,且能监控消毒时长的自动消毒机。
发明内容
本申请实施例在于提出一种基于激光雷达的自动消毒机,解决现有技术存在的不能自动触发消毒,不能监控消毒时长和有效性,造成浪费的问题。
为达此目的,本申请实施例采用以下技术方案:
一方面,一种基于激光雷达的自动消毒机,包括壳体、消毒模块、控制模块、激光雷达,所述的消毒模块、控制模块设置在壳体内,所述的激光雷达设置在壳体上,壳体上开设有窗口,消毒模块通过窗口与外界相通,在外界形成一消毒区域;
所述的激光雷达用于判断是否有人在消毒区域,根据判断结果输出无人/有人信号到控制模块;
所述的控制模块分别与消毒模块、激光雷达信息连通,用于接收激光雷达的无人/有人信号,当接收到有人信号时,控制模块控制消毒模块进行消毒,同时计时,当计时达到预设值或接收到无人信号时,控制模块控制消毒模块停止消毒。
在一种可能的实现方式中,所述的激光雷达与窗口之间的间距为20-40cm。
在一种可能的实现方式中,所述的激光雷达设置高度为40-120cm。
在一种可能的实现方式中,所述的激光雷达设置高度为50-100cm。
在一种可能的实现方式中,所述的激光雷达预存阈值,无人在消毒区域时,激光雷达实时探测距离大于预存阈值,判定无人,向控制模块输出无人信号;当有人在消毒区域时,激光雷达实时探测距离小于预存阈值,判定有人,此时向控制模块输出有人信号。
在一种可能的实现方式中,所述的预存阈值大小为0.5-3m。
在一种可能的实现方式中,所述的预存阈值大小为1-2m。
在一种可能的实现方式中,所述的激光雷达为单点激光雷达或面阵激光雷达。
在一种可能的实现方式中,所述的消毒模块为消毒喷淋装置或者灭菌灯。
在一种可能的实现方式中,所述的基于激光雷达的自动消毒机,还包括报警模块,所述的报警模块为声报警器或光报警器或声光报警器。
本申请采用激光雷达判断是否有人,根据判断结果输出信号到控制模块,控制模块根据信号控制消毒模块消毒,同时计时,当计时达到预设值或接收到无人信号时,控制模块控制消毒模块停止消毒。本申请自动触发消毒,不需要人员接触消毒机,降低交叉感染风险,同时在消毒时长达到预设值或无人消毒时停止消毒,减少了浪费,提高消毒有效性。
附图说明
图1是本申请实施例的模块连接示意图。
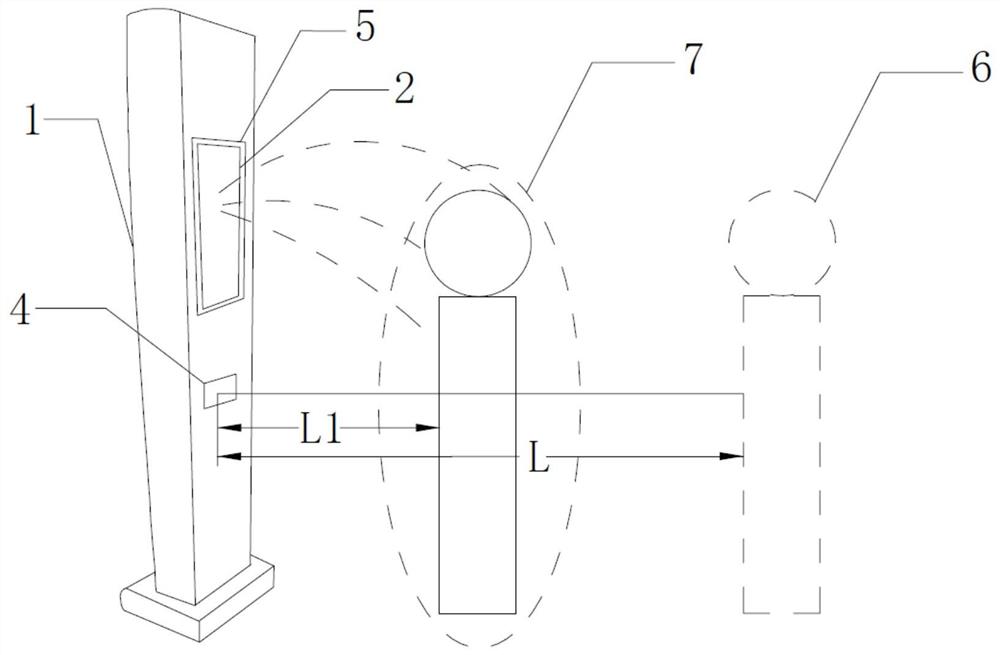
图2是本申请实施例的工作原理示意图。
图中:壳体;2、消毒模块;3、控制模块;4、激光雷达;5、窗口;6、人;7、消毒区域。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本申请的技术方案。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
如图1所示,一种基于激光雷达的自动消毒机,包括壳体1、消毒模块2、控制模块3、激光雷达4,所述的消毒模块2、控制模块3设置在壳体1内,所述的激光雷达4设置在壳体1上,壳体1上开设有窗口5,消毒模块2通过窗口5与外界相通,在外界形成一消毒区域7;
所述的激光雷达4用于判断是否有人进入消毒区域7,根据判断结果输出无人/有人信号到控制模块3;
所述的控制模块3分别与消毒模块2、激光雷达4信息连通,用于接收激光雷达4的无人/有人信号,当接收到有人信号时,控制模块3控制消毒模块2进行消毒,同时计时,当计时达到预设值或接收到无人信号时,控制模块3控制消毒模块2停止消毒。
本申请使用激光雷达4作为探测器,激光雷达4判断是否有人在消毒区域内,根据判断结果输出有人/无人信号到控制模块3,当控制模块3接收到有人信号时,控制消毒模块2消毒,控制模块3同时计时,即统计消毒时间,当计时达到预设值或接收到无人信号时,说明消毒时间已到或人离开消毒区域7,控制模块3控制消毒模块2停止消毒,减少不要的浪费。预设值可根据需要设定,为5-20秒。本申请通过激光雷达自动触发消毒,全程自动化,不需要操作人员操作消毒机或遥控器,也不需要待消毒人员接触消毒机或遥控器,降低交叉感染风险,降低了使用成本;同时在消毒时长达到预设值或无人消毒时停止消毒,减少了浪费,提高消毒有效性。
所述的激光雷达4与窗口5之间的间距为20-40cm。
激光雷达4与窗口之间存在间距,使得激光雷达4不受消毒模块2喷淋消毒液水雾影响,保证激光雷达4正常工作。
所述的激光雷达4设置高度为40-120cm。
所述的激光雷达4设置高度为50-100cm。
为防止小动物误触发或者降水量较大出现水淹等情况,激光雷达4设置高度为40-120cm,优选为50-100cm。
所述的激光雷达4预存阈值,无人在消毒区域6内时,激光雷达实时探测距离大于预存阈值,判定无人,向控制模块3输出无人信号;当有人在消毒区域6时,激光雷达实时探测距离小于预存阈值,判定有人,此时向控制模块3输出有人信号。
如图2所示,当无人在消毒区域6内时,激光雷达实时探测距离为一定值L,L大于预存阈值;当有人在消毒区域6内时,激光雷达4出射光照射到人体后反射回激光雷达4,激光雷达4实时探测距离为L1,L1小于预存阈值,激光雷达4判定有人。
所述的预存阈值大小为0.5-3m。
所述的预存阈值大小为1-2m。
预存阈值大小为0.5-3m,优选为1-2m,预存阈值过小,人与自动消毒机距离过近,消毒模块2消毒区域不能覆盖整个人体;预存阈值过大,人与自动消毒机距离过远,消毒模块2消毒不便。
所述的激光雷达4为单点激光雷达或面阵激光雷达。
激光雷达4选用单点激光雷达,具有测距稳定,成本低的优点;激光雷达4选用面阵激光雷达,则能对一个区域进行探测,利于触发消毒模块2工作。
所述的消毒模块2为消毒喷淋装置或者灭菌灯。
所述的基于激光雷达的自动消毒机,还包括报警模块(图中未画出),所述的报警模块为声报警器或光报警器或声光报警器。
报警模块用于提示人员消毒完成后离开消毒机消毒范围。
以上结合具体实施例描述了本申请的技术原理。这些描述只是为了解释本申请的原理,而不能以任何方式解释为对本申请保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本申请的其它具体实施方式,这些方式都将落入本申请的保护范围之内。
- 一种基于激光雷达的自动消毒机
- 一种基于多标定板的激光雷达与相机外参自动标定方法