融合多旋翼与固定翼的长航时飞行器的气动布局结构及其控制方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及无人机飞行器技术领域,尤其涉及一种融合多旋翼与固定翼的长航时飞行器的气动布局结构及其控制方法。
背景技术
无人机巡线作业是电网管理、分析的重要技术手段,通过无人机巡线,能直观的了解架空高压线的作业状况。为充分提升无人机作业时长,提供可靠依据,尤其在减少地面巡线飞手的飞行时间,提升工作效率,减小因降落对架空高压线的损害,无人机的气动外形与起降方式尤为重要。
无人机的气动外形处于无人机设计的基本要求,气动外形所带来的降落方式是对使用场景的主要限制。过多的起降次数与过大的起降难度降低了无人机巡线的效率,加大了巡线人员的工作量与培养时间,影响了电网运行的经济性,不利于国家节能减排目标的实现。
无人机的降落方法主要是垂直起降与跑道起降。垂直起降操作简单、迅速,限制的场地少,操作简单。固定翼起降耗时长,配套场地多,巡线人员培养时间长。使用垂直起降为降落方法时,其气动外形多为多旋翼或多旋翼融合固定翼,使用跑道滑降时多使用固定翼或固定翼与多旋翼融合。多旋翼续航时间因其较差的气动外形而受到减小,因此需要多次起降更换电池。固定翼续航时间因其较好的气动外形而增加,但因其特殊的气动外形必须保持一定的航速以维持升力。而融合固定翼与多旋翼时,不合理的气动布局(不合理的气动布局尤其指4(多旋翼)+1(固定翼))往往使多旋翼的优点不能有效体现。
传统的多旋翼无人机具有垂直起降快速升空的能力,但因其特殊的动力布局,其续航远远不如同质量电池作用下的固定翼无人机。传统的固定翼无人机起降需要跑道、净空和冗长的起降训练。而把固定翼与多旋翼相结合,能明显提升续航并且减小起降场地以及训练的要求。传统的结合方式如说明书附图图1所示,使得无人机在垂直起降途中容易受到垂向风切变作用在机翼上产生的横向力矩所带来的滚转与抖动,使得在特殊场地下的应用,如电网、架空高压线等空域复杂场地受到限制。传统结合方式所带来的动力配置不佳进一步提升了无人机的使用及制造成本。传统结合方式在水平前飞过程中未能充分利用多旋翼所产生的动力,转而在无人机后端添加一组动力,旨在提升飞机的航速与稳定性。这样的设计没有解决利用多旋翼的动力弥补固定翼的动力的问题,进一步压缩了无人机载荷,加大无人机重量的同时减小了载荷。因此有必要对传统的结合方式提出改变。
同时,常规固定翼无人机在起降过程需要使用跑道,同时在降落时容易受到横向风切变的干扰。而常规多旋翼无人机在飞行时会因没有良好气动布局而缩短续航时间,但在起降时不容易受到风切变的干扰。多旋翼和固定翼融合时,续航时间显著延长,而垂直降落时因纵向风力作用在机翼上产生横向力矩所带来的滚转与机翼载荷增加;同时,传统的结合方式未能充分利用垂向电机提供的动力。
发明内容
本发明针对现有技术存在的缺陷和不足,本发明提出一种融合多旋翼与固定翼的长航时飞行器的气动布局结构及其控制方法,为无人机固定翼与多旋翼的融合提供了新的途径。其将固定翼的设计改变为折叠式的结构,且提供了独特的气动布局。
为了加强对架空高压线的巡线效率与降低操作难度,通过本发明无人机气动布局能明显的提升无人机航速与续航的前提下,减小降落过程中受到的垂向风切变所带来的干扰,提升了无人机的操作的效率与安全性。同时,本发明当中特殊的气动布局能有效提升动力利用率,获得更长的续航时间。其基于多旋翼与固定翼融合,通过折叠与收放固定翼来减小受降落时垂向风切变所带来的纵向力矩产生的横向不稳定性影响,提升降落时的安全性,同时通过气动布局提升无人机的续航时间,减小降落频次。可以根据工作需求选择巡航状态与悬停状态,可通过无人机控制数据链进行姿态转换与航向调节,以提高当前架空高压线无人机巡线的工作效率,减轻因起降所带来的工作负荷,提高无人机电网巡线的效率。
本发明具体采用以下技术方案:
一种融合多旋翼与固定翼的长航时飞行器的气动布局结构,其特征在于,包括:多旋翼无人机本体和一对折叠翼;所述折叠翼与多旋翼无人机本体构成铰接,在折叠和展开状态下均不与多旋翼无人机本体所处水平面平行。在该气动结构下,展开状态下的折叠翼即相当于固定翼。
优选地,所述多旋翼无人机本体包括:吊舱、动力舱、机架和动力设备;所述机架的顶部呈X型,并作为吊舱和动力舱的连接部件;所述动力设备共有四个,分别安装在机架顶部的四个末端。在该结构下,至少要求动力设备不影响折叠翼折叠。
优选地,所述吊舱为机架下方的前部舱体,吊舱前端置有椭圆形整流罩,吊舱的剖面为扁平三角形;所述动力舱为机架下方的后部舱体;所述动力舱与吊舱共同构成流线型结构。
优选地,每个所述动力设备由电机和螺旋桨构成;其中,位于对角线上的第一动力设备和第四动力设备采用正螺旋桨,位于另一对角线上的第二动力设备和第三动力设备采用反螺旋桨;所述折叠翼的后端中部通过舵机连接有副翼。
优选地,所述折叠翼展开时与多旋翼无人机本体所处水平面呈4°角;所述动力设备所在平面与多旋翼无人机本体所处水平面呈-15°角。
根据以上优选气动布局结构的飞行器的控制方法,主要依靠动力设备与折叠翼设备相互配合实现无人机的飞行姿态控制,其特征在于:包括悬停和巡航两种飞行状态。控制悬停状态为六自由度方向调节,调节的方法为加大与减小每个动力设备的功率从而改变力矩。控制巡航状态包括滚转与俯仰的调节。
在悬停状态下,所述折叠翼处于折叠状态,通过控制四个所述动力设备的输出功率对飞行器的飞行状态进行控制。
在巡航状态下,所述折叠翼处于展开状态,通过控制四个所述动力设备的输出功率以及副翼的状态对飞行器的飞行状态进行控制。在使用巡航状态调节俯仰角度与滚转角度的过程时,使用左右副翼上下翘与动力设备功率加大与减小完成。
巡航状态下飞行姿态控制包括偏航角度调节,调节偏航角度的过程为:调整副翼与动力设备,利用舵面产生的力矩来进行偏航角度增减,同时改变动力设备的功率从而使飞行器转向。
调节俯仰角度的过程为:第一动力设备和第四动力设备或第二动力设备和第三动力设备增加或减少功率,第一副翼上下翘起,第二副翼上下翘起。
优选地,由悬停状态切换为巡航状态时,动力设备保持悬停状态时的功率,所述折叠翼展开,完全展开后动力设备的功率为巡航状态的前飞功率。
优选地,由巡航状态切换为悬停状态时,动力设备保持悬停状态时的功率,所述折叠翼收起,完全收起后动力设备的功率为状悬停态的悬停功率。
优选地,飞行器起飞与降落时均采用悬停状态的姿态,收起两侧折叠翼;降落至最后阶段时,展开两侧折叠翼,露出脚架,进行着陆。
本发明及其优选方案具有以下有益效果:
与传统固定翼多旋翼结合方式相比(如说明书附图图1所示),能去除在使用固定翼形态时闲置无用的多旋翼动力设备所带来的额外重量;同时在使用多旋翼形态时能明显的减小因固定机翼所带来的阻力所产生的力矩带来的横向不稳定性的问题。动力设备前倾,旨在减小多旋翼前进时因动力分配所产生的俯仰角带来的动力浪费。在固定翼展开前进时,能利用固定翼翼型带来的升力,配合前倾的动力设备与整机流线型气动外形,能显著提升续航时间。
在起降时,通过收起展开的固定翼减小垂直方向的阻力,提升了横向稳定性,与传统固定翼相比,减小了降落时间与降落跑道长度;与传统的多旋翼固定翼结合方式相比,改善了降落时因垂直风阻所带来的纵向不稳定性。
附图说明
下面结合附图和具体实施方式对本发明进一步详细的说明:
图1为现有技术当中的多旋翼与固定翼结合方式示意图;
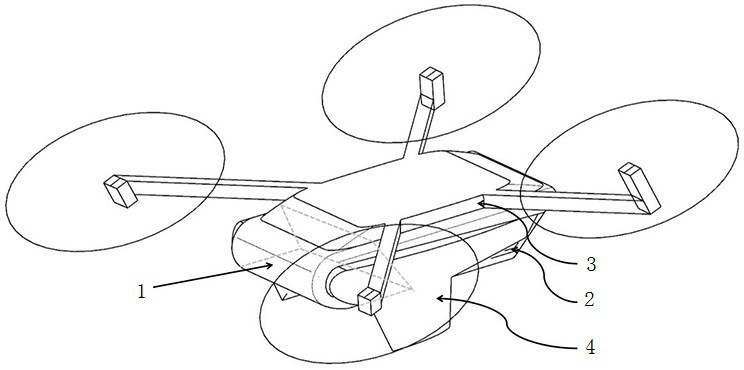
图2为本发明实施例气动布局结构示意图;
图3为本发明实施例动力设备和副翼结构示意图;
图4为本发明实施例折叠翼翼型示意图;
图5为本发明实施例悬停状态主视示意图;
图6为本发明实施例悬停状态俯视示意图;
图中:1-吊舱;2-动力舱;3-机架;4-折叠翼;5-副翼;6-第一动力设备;7-第二动力设备;8-第三动力设备;9-第四动力设备。
具体实施方式
为让本专利的特征和优点能更明显易懂,下文特举实施例,并配合附图,作详细说明如下:
现有技术多旋翼与固定翼结合方式如图1所示,使得无人机在垂直起降途中容易受到垂向风切变作用在机翼上产生的横向力矩所带来的滚转与抖动,使得在特殊场地下的应用,如电网、架空高压线等空域复杂场地受到限制。传统结合方式所带来的动力配置不佳进一步提升了无人机的使用及制造成本。传统结合方式在水平前飞过程中未能充分利用多旋翼所产生的动力,转而在无人机后端添加一组动力,旨在提升飞机的航速与稳定性。这样的设计没有解决利用多旋翼的动力弥补固定翼的动力的问题,进一步压缩了无人机载荷,加大无人机重量的同时减小了载荷。
如图2、图3所示,本实施例提供的融合多旋翼与固定翼的长航时飞行器的气动布局结构包括:多旋翼无人机本体和一对折叠翼4;折叠翼4与多旋翼无人机本体通过舵机构成铰接,在折叠和展开状态下均不与多旋翼无人机本体所处水平面平行。在该气动结构下,展开状态下的折叠翼4即相当于固定翼。
其中,多旋翼无人机本体包括:吊舱1、动力舱2、机架3和动力设备;机架3的顶部呈X型,并作为吊舱1和动力舱2的连接部件;动力设备共有四个,分别安装在机架3顶部的四个末端。在该结构下,至少要求动力设备不影响折叠翼4折叠。
吊舱1为机架3下方的前部舱体,吊舱1前端置有透明椭圆形整流罩,吊舱1的剖面为扁平三角形;动力舱2为机架3下方的后部舱体;动力舱2与吊舱1共同构成流线型结构。吊舱1与动力舱2通过端子线电气连接,可根据实时任务需求更换电子设备。动力舱2内置电池、飞控、接收机、超声波传感器、俯视超声波、气压高度计、电子罗盘、GPS接收机等传感器。
每个动力设备由电机和螺旋桨构成;其中,位于对角线上的第一动力设备6和第四动力设备9采用正螺旋桨,位于另一对角线上的第二动力设备7和第三动力设备8采用反螺旋桨;折叠翼4的后端中部通过舵机连接有副翼5。
如图4所示,在本实施例中,折叠翼4采用Profili V2中的具有优良气动能力的BE8457E型号翼型作骨架结构。
折叠翼4展开时与多旋翼无人机本体所处水平面呈4°角,该角度确定了固定翼能以提供升力的同时,无人机不至于前倾太多。动力设备所在平面与多旋翼无人机本体所处水平面呈-15°角,通过动力设备与折叠翼间的夹角配合折叠翼翼型与机体外形的流线型能获得更大升力与续航。
根据本实施例提供的气动布局结构的飞行器的控制方法:主要依靠动力设备与折叠翼4设备相互配合实现无人机的飞行姿态控制,其特征在于:包括悬停和巡航两种飞行状态。控制悬停状态为六自由度方向调节,调节的方法为加大与减小每个动力设备的功率从而改变力矩。控制巡航状态包括滚转与俯仰的调节。
如图5、图6所示,在悬停状态下,折叠翼4处于折叠状态,通过控制四个动力设备的输出功率对飞行器的飞行状态进行控制。
在巡航状态下,折叠翼4处于展开状态,通过控制四个动力设备的输出功率以及副翼5的状态对飞行器的飞行状态进行控制。在使用巡航状态调节俯仰角度与滚转角度的过程时,使用左右副翼5上下翘与动力设备功率加大与减小完成。
巡航状态下飞行姿态控制包括偏航角度调节,调节偏航角度的过程为:调整副翼5与动力设备,利用舵面产生的力矩来进行偏航角度增减,同时改变动力设备的功率从而使飞行器转向。
调节俯仰角度的过程为:第一动力设备6和第四动力设备9或第二动力设备7和第三动力设备8增加或减少功率,第一副翼5上下翘起,第二副翼5上下翘起。
具体地,悬停状态:四个动力设备提供升力,保持动力设备所在平面水平,其四个动力设备功率由姿态决定。
当无人机有前倾的趋势时,第一动力设备6和第二动力设备7同步增加功率,第三动力设备8和第四动力设备9,直到前倾的趋势消失。
当无人机有后倾的趋势时,第一动力设备6和第二动力设备7同步减小功率,第三动力设备8和第四动力设备9同步增大功率,直到后倾的趋势消失。
当无人机有左倾的趋势时,第一动力设备6和第三动力设备8同步增加功率,第二动力设备7和第四动力设备9同步减小功率,直到左倾的趋势消失。
当无人机有右倾的趋势时,第一动力设备6和第三动力设备8同步增加功率,第三动力设备8和第四动力设备9,直到右边倾的趋势消失。
当无人机有左转的趋势时,第一动力设备6和第四动力设备9同步减小功率,第二动力设备7和第三动力设备8同步增大功率,直到左转的趋势消失。
当无人机有右转的趋势时,第一动力设备6和第四动力设备9同步增加功率,第二动力设备7和第三动力设备8同步减小功率,直到右转的趋势消失。
无人机悬停时抵消风力,保持姿态的方法如上所示,该方法适用于无人机工作悬停状态的细微姿态调节。
当操控手控制无人机后飞时,第一动力设备6和第二动力设备7同步增加功率,第三动力设备8和第四动力设备9,直到操纵手取消后飞命令。
当操控手控制无人机前飞时,第一动力设备6和第二动力设备7同步减小功率,第三动力设备8和第四动力设备9同步增大功率,直到操纵手取消前飞命令。
当操控手控制无人机右倾时,第一动力设备6和第三动力设备8同步增加功率,第二动力设备7和第四动力设备9同步减小功率,直到操纵手取消右倾命令。
当操控手控制无人机左倾时,第一动力设备6和第二动力设备7同步增加功率,第三动力设备8和第四动力设备9,直到操纵手取消左倾命令。
当操控手控制无人机右转时,第一动力设备6和第四动力设备9同步减小功率,第二动力设备7和第三动力设备8同步增大功率,直到操纵手取消右转的命令。
当操控手控制无人机左转时,第一动力设备6和第四动力设备9同步增加功率,第二动力设备7和第三动力设备8同步减小功率,直到操纵手取消左转的命令。
上述控制方式为角度环控制,即由机体旋转所产生的角度来控制,机体旋转产生的角度的正负与大小由旋转定理决定,飞行器的体坐标系为“北东地坐标系”。
第二种飞行状态为:
巡航状态,无人机展开固定翼,多旋翼提供部分升力与全部动力,固定翼部分提供部分升力,该状态下的动力为混合动力。在该状态下的控制方法如下所示:
前飞时,固定翼副翼51、2保持不动,第一动力设备6和第二动力设备7同步减小功率,第三动力设备8和第四动力设备9同步增大功率,直到两固定翼所处的平面与水平面重合。
倒车时,固定翼副翼51、2保持不动,第一动力设备6和第二动力设备7同步增加功率,第三动力设备8和第四动力设备9,直到两固定翼所处的平面与水平面重合。
左转时:固定翼副翼51向上翘起,2向下翘起,第一动力设备6和第三动力设备8同步增加功率,第三动力设备8和第四动力设备9,达到操控手所要求的倾斜角度后,固定翼副翼51、2归中,动力设备功率为前飞状态功率。
右转时:固定翼副翼51向下翘起,2向上翘起,第一动力设备6和第三动力设备8同步减小功率,第三动力设备8和第四动力设备9同步增加功率,达到操控手所要求的倾斜角度后,固定翼副翼51、2归中,动力设备功率为前飞状态功率。
由悬停状态切换为巡航状态时,动力设备保持悬停状态时的功率,折叠翼4展开,完全展开后动力设备的功率为巡航状态的前飞功率。
由巡航状态切换为悬停状态时,动力设备保持悬停状态时的功率,折叠翼4收起,完全收起后动力设备的功率为状悬停态的悬停功率。
飞行器起飞与降落时均采用悬停状态的姿态,收起两侧折叠翼4;降落至最后阶段时,展开两侧折叠翼4,露出脚架,进行着陆。在降落时,铰链做动,收起折叠翼4直至与机体下部平面和两翼尖共面,此时伸出降落脚架进行降落。
本专利不局限于上述最佳实施方式,任何人在本专利的启示下都可以得出其它各种形式的融合多旋翼与固定翼的长航时飞行器的气动布局结构及其控制方法,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本专利的涵盖范围。
- 融合多旋翼与固定翼的长航时飞行器的气动布局结构及其控制方法
- 一种具备固定翼面与水平推进器的长续航多旋翼飞行器及其控制方法