一种可调节的起重机臂架
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及起重机技术领域,具体为一种可调节的起重机臂架。
背景技术
起重机是指在一定范围内垂直提升和水平搬运重物的多动作起重机械。又称天车,航吊,吊车。
传统的起重机在使用过程中当物品被起重机勾爪挂起并起吊后需要将物品进行位置转移,而在转移过程中由于勾爪是通过吊绳或钢缆进行吊置,所以极易出现当旋转角度过大或速度过快时会由于惯性原因将物品甩动而易产生损坏吊置物品的问题,进一步可能会使吊置物品挂置不牢固而摔落对周边及使用者造成安全隐患,为了解决上述问题,我们提出了一种可调节的起重机臂架。
发明内容
为实现上述转移过程不易晃动的目的,本发明提供如下技术方案:一种可调节的起重机臂架,包括立柱、固绳组件与卡扣组件,所述立柱的内壁固定安装有转轴,所述立柱的左侧固定安装有线缆盘,所述线缆盘的内壁活动连接有钢缆,所述立柱的顶部活动连接有第一臂架,所述第一臂架的右侧活动连接有第二臂架,所述第二臂架的左侧开设有第一固定孔,所述钢缆的底部活动连接有吊杆,所述吊杆的顶部开设有第二固定孔,所述吊杆的外壁活动连接有固定壳,所述吊杆的底部正面与背面均固定安装有限位底座,所述吊杆的底端固定安装有挂钩,所述吊杆的左右两侧均开设有活动槽,两个所述活动槽的底部相背一侧均活动连接有齿轮,所述固定壳的内壁左右两侧均固定安装有电机;
所述第一固定孔的左右两侧内壁均固定安装有第一电磁块。
作为优化,所述固绳组件包括数量为两个的限位架,两个所述限位架的底部内壁均活动连接有限位杆,两个所述限位杆的相对一侧均固定安装有外壳,两个所述外壳的相对一侧内壁活动连接有放线轮,所述外壳的顶部左右两侧均固定安装有第一弹簧。
作为优化,所述卡扣组件包括电动伸缩杆,所述电动伸缩杆的右侧固定安装有圆盘,所述圆盘的右侧顶部内壁活动连接有滚球,所述圆盘的顶部内壁固定安装有数量为四个的第二弹簧,四个所述第二弹簧的顶部固定安装有第二电磁块。
作为优化,两个所述限位架的顶部与第二臂架的底部固定连接,两个限位架的内壁均开设有长条孔,两个限位杆的相对一侧穿过两个长条孔并与两个外壳的相背一侧固定连接,两个第一弹簧的顶部与第二臂架的底部固定连接,钢缆的内壁与放线轮的外壁活动连接。
作为优化,所述电动伸缩杆由内杆与外杆组成,外杆的内壁与内杆的外壁活动连接,圆盘的左侧与电动伸缩杆内杆的右侧固定连接,滚球的外壁与吊杆的外壁活动连接,确保了当电动伸缩杆伸缩时可以带动圆盘进行移动。
作为优化,所述第二臂架的底部开设有与钢缆相适配的凹槽,凹槽的内壁固定安装有感应器,感应器可启动电机运转,确保当钢缆被挤压到槽内时可以触碰感应器来启动电机的运转。
作为优化,所述卡扣组件的数量总共有四个,每个卡扣组件分别以吊杆的垂直中心线为轴均匀分布在固定壳的顶部左侧、顶部右侧、底部左侧、底部右侧内壁,且位于顶部卡扣组件中圆盘的大小与第一固定孔相适配,位于底部卡扣组件中圆盘的大小与第二固定孔相适配,多个卡扣组件可以确保固定壳整体在固定时的稳定性。
作为优化,每个所述卡扣组件中每四个第二弹簧和每个第二电磁块构成一组,共有十二组,滚球的数量为四个,每组第二弹簧、第二电磁块与每个滚球以每个圆盘的圆心为轴均匀分布,多个第二电磁块进一步确保固定壳固定时的稳定性,多个滚球可以确保固定壳在上升过程中更加平顺减少上升阻力。
作为优化,两个所述电机的输出轴分别与两个齿轮的背面固定连接,两个电机的背面与固定壳的内壁固定连接,两个活动槽的内壁均开设有与两个齿轮相啮合的齿条,两个电机输出轴转动方向为反向,活动槽内壁开设的齿条确保当两个电机反向运转时能够使固定壳上升或下降。
作为优化所述第一电磁块的数量总共有四个,并且每个第一电磁块的形状为环形,其中两个第一电磁块的外壁与第一固定孔的内壁固定连接,另外两个第一电磁块的外壁与第二固定孔的内壁固定连接,多个第一电磁块可以使第一电磁块与第二电磁块通电后接触更加稳定及牢固。
本发明的有益效果是:当使用者通过调节第一臂架与第二臂架将整个起重机展开,并将钢缆放下挂牢待吊物品之后再继续调节第一臂架与第二臂架将物品吊起时随着放线轮上移最终将钢缆挤压到第二臂架底部凹槽并同时触碰感应器启动电机开始反向运转,此时可以初步将钢缆与吊杆之间初步夹紧,防止物品移动时产生的惯性带动物品晃动,之后再通过卡扣组件,使固定壳开始顺着吊杆上移,最终使整个固定壳在第二臂架与吊杆之间固定,这样一来我们可以直接用固定壳代替细钢缆即使再通过转轴转动立柱也不会由于转动时产生较大的惯性使第二臂架底部挂取的物品晃动,保护了待挂物品内部防止物品晃动损坏产品,并且也减少由于晃动较大产生物品坠落的安全隐患。
附图说明
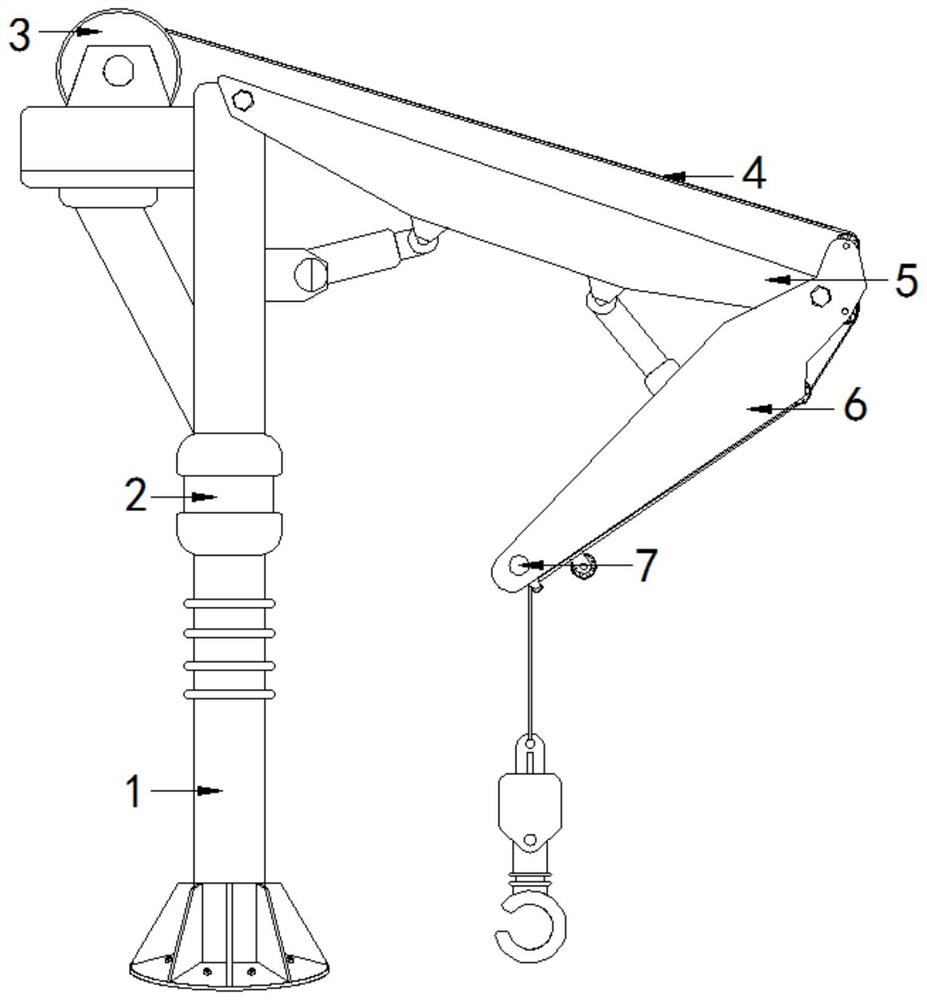
图1为本发明结构示意图;
图2为本发明结构运动状态示意图;
图3为本发明图2中A处结构放大示意图;
图4为本发明固定壳结构侧视剖视图;
图5为本发明固定壳结构正视剖视图;
图6为本发明图4中B处结构放大示意图;
图7为本发明图4中C处结构放大示意图;
图8为本发明圆盘结构正视示意图;。
图中:1、立柱;2、转轴;3、线缆盘;4、钢缆;5、第一臂架;6、第二臂架;600、固绳组件;601、限位架;602、限位杆;603、外壳;604、放线轮;605、第一弹簧;7、第一固定孔;70、第一电磁块;8、吊杆;80、活动槽;81、齿轮;82、电机;9、第二固定孔;10、固定壳;1000、卡扣组件;1001、电动伸缩杆;1002、圆盘;1003、滚球;1004、第二弹簧;1005、第二电磁块;11、限位底座;12、挂钩。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-5,一种可调节的起重机臂架,包括立柱1、固绳组件600与卡扣组件1000,立柱1的内壁固定安装有转轴2,立柱1的左侧固定安装有线缆盘3,线缆盘3的内壁活动连接有钢缆4,立柱1的顶部活动连接有第一臂架5,第一臂架5的右侧活动连接有第二臂架6,第二臂架6的左侧开设有第一固定孔7,钢缆4的底部活动连接有吊杆8,吊杆8的顶部开设有第二固定孔9,吊杆8的外壁活动连接有固定壳10,吊杆8的底部正面与背面均固定安装有限位底座11,吊杆8的底端固定安装有挂钩12,吊杆8的左右两侧均开设有活动槽80,两个活动槽80的底部相背一侧均活动连接有齿轮81,固定壳10的内壁左右两侧均固定安装有电机82;
第一固定孔7的左右两侧内壁均固定安装有第一电磁块70。
请参阅图6,固绳组件600包括数量为两个的限位架601,两个限位架601的底部内壁均活动连接有限位杆602,两个限位杆602的相对一侧均固定安装有外壳603,两个外壳603的相对一侧内壁活动连接有放线轮604,外壳603的顶部左右两侧均固定安装有第一弹簧605。
请参阅图4和7,卡扣组件1000包括电动伸缩杆1001,电动伸缩杆1001的右侧固定安装有圆盘1002,圆盘1002的右侧顶部内壁活动连接有滚球1003,圆盘1002的顶部内壁固定安装有数量为四个的第二弹簧1004,四个第二弹簧1004的顶部固定安装有第二电磁块1005。
请参阅图3和6,两个限位架601的顶部与第二臂架6的底部固定连接,两个限位架601的内壁均开设有长条孔,两个限位杆602的相对一侧穿过两个长条孔并与两个外壳603的相背一侧固定连接,两个第一弹簧605的顶部与第二臂架6的底部固定连接,钢缆4的内壁与放线轮604的外壁活动连接。
请参阅图4和7,电动伸缩杆1001由内杆与外杆组成,外杆的内壁与内杆的外壁活动连接,圆盘1002的左侧与电动伸缩杆1001内杆的右侧固定连接,滚球1003的外壁与吊杆8的外壁活动连接,确保了当电动伸缩杆1001伸缩时可以带动圆盘1002进行移动。
请参阅图6,第二臂架6的底部开设有与钢缆4相适配的凹槽,凹槽的内壁固定安装有感应器,感应器可启动电机82运转,确保当钢缆4被挤压到槽内时可以触碰感应器来启动电机82的运转。
请参阅图4和7,卡扣组件1000的数量总共有四个,每个卡扣组件1000分别以吊杆8的垂直中心线为轴均匀分布在固定壳10的顶部左侧、顶部右侧、底部左侧、底部右侧内壁,且位于顶部卡扣组件1000中圆盘1002的大小与第一固定孔7相适配,位于底部卡扣组件1000中圆盘1002的大小与第二固定孔9相适配,多个卡扣组件1000可以确保固定壳10整体在固定时的稳定性。
请参阅图7-8,每个卡扣组件1000中每四个第二弹簧1004和每个第二电磁块1005构成一组,共有十二组,滚球1003的数量为四个,每组第二弹簧1004、第二电磁块1005与每个滚球1003以每个圆盘1002的圆心为轴均匀分布,多个第二电磁块1005进一步确保固定壳10固定时的稳定性,多个滚球1003可以确保固定壳10在上升过程中更加平顺减少上升阻力。
请参阅图5,两个电机82的输出轴分别与两个齿轮81的背面固定连接,两个电机82的背面与固定壳10的内壁固定连接,两个活动槽80的内壁均开设有与两个齿轮81相啮合的齿条,两个电机82输出轴转动方向为反向,活动槽80内壁开设的齿条确保当两个电机82反向运转时能够使固定壳10上升或下降。
请参阅图4,第一电磁块70的数量总共有四个,并且每个第一电磁块70的形状为环形,其中两个第一电磁块70的外壁与第一固定孔7的内壁固定连接,另外两个第一电磁块70的外壁与第二固定孔9的内壁固定连接,多个第一电磁块70可以使第一电磁块70与第二电磁块1005通电后接触更加稳定及牢固。
在使用时,请参阅图1-8,使用者可以先通过调节第一臂架5与第二臂架6将整个起重机展开,并通过线缆盘3将钢缆4放下,钢缆4会通过固绳组件600中的放线轮604转动向下放线并同时带动底部吊杆8向下进一步带动挂钩12向下移动,此时使用者可将需要起吊的物品挂至挂钩12处,待物品挂牢之后再继续调节第一臂架5与第二臂架6并将钢缆4通过线缆盘3收紧,当钢缆4收紧时吊杆8会随着钢缆4的收紧向上移动,此时吊杆8的顶部会顶触到固绳组件600中的外壳603,随着钢缆4持续收线最终会将外壳603带着整个放线轮604上移,随着放线轮604上移最终将钢缆4挤压到第二臂架6底部凹槽并同时触碰感应器启动电机82开始反向运转,当两个电机82运转时会同时带动两个齿轮81也随之反向运转,最终带动整个固定壳10开始顺着吊杆8上移,当固定壳10上移到吊杆8的顶端时此时通过电信号四个卡扣组件1000中的电动伸缩杆1001被启动开始伸展并使内杆带动四个圆盘1002分别向第一固定孔7与第二固定孔9内移动,当移动到适当位置之后,四个第一电磁块70与四个圆盘1002中的第二电磁块1005开始通正向电使第一电磁块70与第二电磁块1005之间磁极相异,最终将四个圆盘1002中的第二电磁块1005吸出使四个电动伸缩杆1001中的四个内杆分别固定在第一固定孔7与第二固定孔9中,最终使整个固定壳10在第二臂架6与吊杆8之间固定,之后使用者可以再通过转轴2转动整个立柱1来对物品进行移动。
综上所述,使用者可以先通过调节第一臂架5与第二臂架6将整个起重机展开,并通过线缆盘3将钢缆4放下,钢缆4会通过固绳组件600中的放线轮604转动向下放线并同时带动底部吊杆8向下进一步带动挂钩12向下移动,此时使用者可将需要起吊的物品挂至挂钩12处,待物品挂牢之后再继续调节第一臂架5与第二臂架6并将钢缆4通过线缆盘3收紧,当钢缆4收紧时吊杆8会随着钢缆4的收紧向上移动,此时吊杆8的顶部会顶触到固绳组件600中的外壳603,随着钢缆4持续收线最终会将外壳603带着整个放线轮604上移,随着放线轮604上移最终将钢缆4挤压到第二臂架6底部凹槽并同时触碰感应器启动电机82开始反向运转,当两个电机82运转时会同时带动两个齿轮81也随之反向运转,最终带动整个固定壳10开始顺着吊杆8上移,当固定壳10上移到吊杆8的顶端时此时通过电信号四个卡扣组件1000中的电动伸缩杆1001被启动开始伸展并使内杆带动四个圆盘1002分别向第一固定孔7与第二固定孔9内移动,当移动到适当位置之后,四个第一电磁块70与四个圆盘1002中的第二电磁块1005开始通正向电使第一电磁块70与第二电磁块1005之间磁极相异,最终将四个圆盘1002中的第二电磁块1005吸出使四个电动伸缩杆1001中的四个内杆分别固定在第一固定孔7与第二固定孔9中,最终使整个固定壳10在第二臂架6与吊杆8之间固定,之后使用者可以再通过转轴2转动整个立柱1来对物品进行移动。
以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 用于伸缩臂架的调节机构、伸缩臂架和起重机
- 一种起重机的臂架铰座系统以及臂架式起重机