一种可旋转的微创手术器械快换装置
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及微创手术机器人技术领域,具体而言,涉及一种可旋转的微创手术器械快换装置。
背景技术
参考申请公布号为CN109091237A、名称为微创手术器械辅助系统的中国发明专利申请,以腹腔镜为代表的微创外科被誉为20世纪医学科学对人类文明的重要贡献之一,微创手术操作是指医生利用细长的手术工具通过人体表面的微小切口探入到体内进行手术操作的。它与传统的开口手术相比具有手术切口小、出血量少、术后疤痕小、恢复时间快等优点,这使得病人遭受的痛苦大大减少;因此微创外科被广泛的应用于临床手术。
参考申请公布号为CN109091238A、名称为分体式微创手术器械辅助系统的中国发明专利申请,微创外科手术机器人系统包括医生操作台,外科医生通过操作医生机械臂来精准地控制患者操作台的机械臂上的一个或多个手术器械执行各种手术动作。
参考公开号为CN105286999A的发明专利申请以及公开号为CN105286989A的发明申请,外科手术器械是外科手术操作的必备工具,其可以执行不同功能,包括夹持、切除、切割、缝合、吻合等。外科手术器械具有不同的配置,其包括执行末端,腕节、器械杆、器械盒等,外科手术器械被插入,穿过开口,以实施远程外科手术。手术过程中,患者机械臂套装无菌帷帘附件,以隔离手术器械和周围区域,维持患者操作台的清洁。手术器械需通过无菌帷帘附件上的器械转接座与患者机械臂上的器械升降座连接,并接收来自机械臂的电能、机械能及其他信号。同时,为满足不同手术操作任务(夹持、缝合、打节等)的动作需求,手术器械还可随时更换并与连接至患者机械臂上的器械安装座重新连接。
用于成像的内窥镜是微创手术机器人系统的重要组成部分,现有内窥镜的安装过程复杂,更换速度慢。
发明内容
本发明就是为了解决现有微创手术机器人系统中内窥镜的安装过程复杂,更换速度慢的技术问题,提供了一种可旋转的微创手术器械快换装置。
本发明提供的可旋转的微创手术器械快换装置,包括隔离组件和套筒组件;隔离组件包括隔离板、连接轮、旋转座、外壳、第一齿轮、第二齿轮、圆弧形导电条、弹簧针和导电铜片,隔离板与外壳固定连接,隔离板设有第一槽口、第二槽口,第一齿轮与第一槽口转动连接,第二齿轮与连接轮连接,连接轮与第二槽口转动连接,第一齿轮和第二齿轮啮合;旋转座与第一齿轮固定连接;导电铜片与隔离板连接;圆弧形导电条与外壳连接;弹簧针与旋转座连接,弹簧针的下端与圆弧形导电条接触;旋转座设有对称布置的第一卡槽、第二卡槽;导电铜片与圆弧形导电条之间通过电线连接;
套筒组件包括夹持套筒、锁紧螺钉、第一按钮、第二按钮、第一弹簧、第二弹簧、第一滑块和第二滑块,夹持套筒设有中心通孔、安装槽、第一滑块容纳槽、第二滑块容纳槽,第一滑块设有第一钩连部,第二滑块设有第二钩连部,锁紧螺钉穿过夹持套筒的左部分并与夹持套筒的右部分上的螺纹连接;第一按钮和第二按钮对称布置,第一按钮穿过夹持套筒,第二按钮穿过夹持套筒,第一滑块与第一按钮连接,第二滑块与第二按钮连接,第一钩连部穿过夹持套筒,第二钩连部穿过夹持套筒,第一滑块位于第一滑块容纳槽中,第二滑块位于第二滑块容纳槽中,第一弹簧位于第一滑块容纳槽中,第二弹簧位于第二滑块容纳槽中,第一弹簧连接于第一滑块和夹持套筒之间,第二弹簧连接于第二滑块和夹持套筒之间。
本发明的有益效果是,具有结构简单、成本低,易于操作,可进行器械的快速更换,人机交互性好,反应灵敏、工作可靠等优点。
本发明进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
附图说明
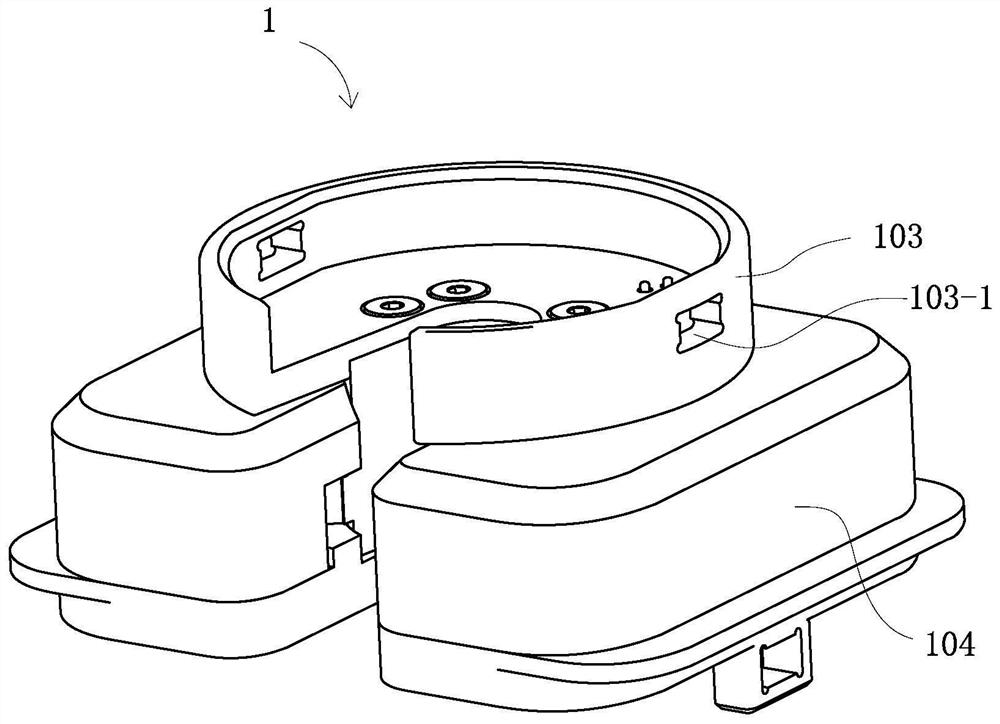
图1是隔离组件的立体图;
图2是套筒组件的立体图;
图3是图1所示隔离组件的爆炸图;
图4是图1所示隔离组件的俯视图;
图5是图1所示隔离组件的仰视图;
图6是图4中D-D方向的剖视图;
图7是图6中P处的局部放大图;
图8是套筒组件的结构示意图;
图9是图8中M-M方向的剖视图;
图10是图8中L-L方向的剖视图;
图11是内窥镜安装到可旋转的微创手术器械快换装置的结构示意图。
图中符号说明:
1.隔离组件,101.隔离板,101-1.第一槽口,101-2.第二槽口,102.连接轮,103.旋转座,104.外壳,105.第一齿轮,106.第二齿轮,107.圆弧形导电条,108.弹簧针,109.导电铜片,110.螺钉;2.套筒组件,3.内窥镜。
具体实施方式
以下参照附图,以具体实施例对本发明作进一步详细说明。
如图1-2所示,可旋转的微创手术器械快换装置包括隔离组件1和套筒组件2,隔离组件1与套筒组件2是两个独立的结构,可单独拆卸更换,套筒组件2通过平移式卡扣结构与隔离组件上的旋转座上的槽口固定连接。
如图3-7所示,隔离组件1包括隔离板101、连接轮102、旋转座103、外壳104、第一齿轮105、第二齿轮106、圆弧形导电条107、弹簧针108、导电铜片109、螺钉110,离板101与外壳104通过螺钉110固定连接。隔离板101设有第一槽口101-1、第二槽口101-2,第一齿轮105与第一槽口101-1转动连接,第二齿轮106安装连接轮102上,连接轮102与第二槽口101-2转动连接,第一齿轮105和第二齿轮106啮合;旋转座103通过螺钉固定连接在第一齿轮105上。导电铜片109与隔离板101连接。外壳104设有导电条安装槽104-1,圆弧形导电条107固定安装在导电条安装槽104-1上。弹簧针108与旋转座103连接,弹簧针108的下端与圆弧形导电条107接触。旋转座103设有对称布置的第一卡槽103-1、第二卡槽103-2。导电铜片109与圆弧形导电条107之间焊接一根电线来实现连接。
隔离组件1的工作原理为:外部电机作为动力源,电机的输出轴连接一个传动机构,该传功机构带动连接轮102转动(连接轮102上可以设置用于可与传动机构连接配合的槽孔),连接轮102带动第二齿轮106转动,第一齿轮105转动,第一齿轮105带动旋转座103转动。
如图8-10所示,套筒组件2包括夹持套筒2-1、锁紧螺钉2-2、第一按钮2-3、第二按钮2-4、第一弹簧2-5、第二弹簧2-6、第一滑块2-7、第二滑块2-8,夹持套筒2-1设有中心通孔2-1-1、安装槽2-1-2、第一滑块容纳槽2-1-3、第二滑块容纳槽2-1-4,第一滑块2-7设有第一钩连部2-7-1,第二滑块2-8设有第二钩连部2-8-1,锁紧螺钉2-2穿过夹持套筒2-1的左部分并与夹持套筒2-1的右部分上的螺纹连接。第一按钮2-3和第二按钮2-4对称布置,第一按钮2-3穿过夹持套筒2-1,第二按钮2-4穿过夹持套筒2-1,第一滑块2-7与第一按钮2-3连接,第二滑块2-8与第二按钮2-4连接,第一钩连部2-7-1穿过夹持套筒2-1,第二钩连部2-8-1穿过夹持套筒2-1,第一滑块2-7位于第一滑块容纳槽2-1-3中,第二滑块2-8位于第二滑块容纳槽2-1-4中,第一弹簧2-5位于第一滑块容纳槽2-1-3中、第二弹簧2-6位于第二滑块容纳槽2-1-4中,第一弹簧2-5连接于第一滑块2-7和夹持套筒2-1之间,第二弹簧2-6连接于第二滑块2-8和夹持套筒2-1之间。用手按压第一按钮2-3和第二按钮2-4能够使第一钩连部2-7-1、第二钩连部2-8-1向内运动,然后将夹持套筒2-1放入旋转座103中,然后手松开第一按钮2-3和第二按钮2-4,进而使第一钩连部2-7-1、第二钩连部2-8-1分别插入旋转座103的第一卡槽103-1、第二卡槽103-2中,实现套筒组件2安装到隔离组件1中。
如图11所示,内窥镜3的镜杆穿过实现套筒组件2的中心通孔2-1-1,内窥镜3的后端把手与镜杆连接部位置于安装槽2-1-2中,然后由锁紧螺钉2-2锁紧,保证内窥镜完全固定,内窥镜与套筒组件2之间无相对滑动,保证手术过程中医生操作的精确度。卡扣结构使套筒组件2可靠地安装在隔离组件1上。弹簧针108的上端与内窥镜3上的识别芯片的管脚电路接触,导电铜片109通过弹簧针或导线与主控电路连接,这样主控电路就能够对内窥镜是否安装到位进行识别。
旋转座103旋转可以调整内窥镜3的位置。当旋转座103旋转时,弹簧针108随着旋转座103旋转,弹簧针108始终与圆弧形导电条107导通。
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的技术人员受其启示,在不脱离本发明创造宗旨的情况下,采用其它形式的零件构型、驱动装置以及连接方式不经创造性的设计与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种可旋转的微创手术器械快换装置
- 一种微创手术器械用快换装置