缓冲装置以及具备该缓冲装置的机器人
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及缓冲装置以及具备该缓冲装置的机器人。
背景技术
以往,公知有一种用于对从第1物体向第2物体传递的冲击进行缓和的缓冲装置。作为这样的缓冲装置,例如存在专利文献1所提出的覆盖件。
专利文献1中记载了一种覆盖机械手的覆盖件。该覆盖件具有:缓冲层;接触传感器,被配置于该缓冲层的外侧;接近传感器,被配置于该接触传感器的外侧;以及涂覆(coating)层,被配置于最外侧。
专利文献1:日本特开2017-205867号公报
另外,专利文献1的覆盖件以及其他以往存在的缓冲装置一般具备:外壳,包含作为机械手的内部构造等的第1物体;传感器,用于检测由上述第2物体施加于上述外壳的外力或者由上述第2物体经由上述外壳施加于上述第1物体的外力等;以及动作抑制装置,用于基于上述传感器的检测值来抑制上述第1物体以及上述外壳的动作。
然而,上述以往存在的缓冲装置在对从第1物体向第2物体传递的冲击进行缓和的程度上存在改善的余地。另外,存在无法利用传感器高精度地检测由上述第2物体施加于上述外壳的外力或者由上述第2物体经由上述外壳施加于上述第1物体的外力等的情况。由此,存在动作抑制装置不能够基于传感器的检测值来如所希望那样抑制上述第1物体以及上述外壳的动作的情况。
发明内容
鉴于此,本发明的目的在于,提供能够充分对从第1物体向第2物体传递的冲击进行缓和且能够基于传感器的检测值来如所希望那样抑制第1物体以及外壳的动作的缓冲装置以及具备该缓冲装置的机器人。
为了解决上述课题,本发明所涉及的缓冲装置用于对从第1物体向第2物体传递的冲击进行缓和,其特征在于,具备:外壳,包含上述第1物体,由具有挠性的弹性体构成;传感器,用于检测由上述第2物体施加于上述外壳的外力、由上述第2物体经由上述外壳施加于上述第1物体的外力、或者与上述外力的任一个对应的物理量;以及动作抑制装置,用于基于上述传感器的检测值来抑制上述第1物体以及上述外壳的动作。
根据上述构成,由于在由上述第2物体对上述外壳施加了外力时,上述外壳以挠曲的方式发生弹性变形,所以能够充分缓和从上述第1物体向上述第2物体传递的冲击。另外,在由上述第2物体施加于外壳的外力比较小的阶段,反推上述第2物体的外壳的弹力与上述以往存在的缓冲装置的外壳的情况相比迅速地增加。因此,能够利用传感器高精度地检测由上述第2物体施加于上述外壳的外力或者由上述第2物体经由上述外壳施加于上述第1物体的外力。由此,动作抑制装置能够基于传感器的检测值如所希望那样抑制上述第1物体以及上述外壳的动作。
上述外壳可以为薄壁,在上述第1物体与上述外壳之间设置有间隙。
根据上述构成,外壳不会被其他物体妨碍,能够良好地发生弹性变形。
例如,上述外壳可以通过以被上述第2物体施加了外力的部分遍及其厚度方向的整个区域朝向上述间隙挠曲的方式发生弹性变形来缓和从上述第1物体向上述第2物体传递的冲击。
上述薄壁的厚度可以为5.0mm以下。
根据上述构成,外壳能够良好地发生弹性变形。
上述薄壁的厚度可以为1.0mm以上2.0mm以下。
根据上述构成,外壳能够进一步良好地发生弹性变形。
构成上述外壳的弹性体可以还具有非压缩性。
根据上述构成,外壳能够良好地发生弹性变形。
构成上述外壳的弹性体可以由非发泡树脂形成。
根据上述构成,能够容易地形成外壳,且外壳能够良好地发生弹性变形。
例如,上述非发泡树脂的主成分可以为聚乙烯。
上述外壳的至少一部分可以具有向厚度方向的外侧突出的弯曲部。
根据上述构成,反推上述第2物体的外壳的弹力与上述以往存在的缓冲装置的外壳的情况相比进一步迅速地增加。因此,能够利用传感器进一步高精度地检测由上述第2物体施加于上述外壳的外力或者由上述第2物体经由上述外壳施加于上述第1物体的外力。
上述外壳的与上述第1物体对置的内表面可以是平滑的。
根据上述构成,能够容易地形成外壳,且外壳不会被其他物体妨碍,能够良好地发生弹性变形。
为了解决上述课题,本发明所涉及的机器人具备上述任一项所记载的缓冲装置和上述第1物体,其特征在于,上述第1物体为机器人的内部构造,上述外壳为上述机器人的外壳。
根据上述构成,由于在由上述第2物体对上述外壳施加了外力时,上述外壳以挠曲的方式发生弹性变形,所以能够充分缓和从机器人的内部构造(第1物体)向上述第2物体传递的冲击。另外,在由上述第2物体施加于外壳的外力比较小的阶段,反推上述第2物体的外壳的弹力与上述以往存在的缓冲装置的外壳的情况相比迅速地增加。因此,能够利用传感器高精度地检测由上述第2物体施加于上述外壳的外力或者由上述第2物体经由上述外壳施加于上述机器人的内部构造的外力。由此,动作抑制装置能够基于传感器的检测值如所希望那样抑制机器人的动作。
例如,可以具备:机械臂,具有至少一个关节轴;和马达,用于驱动上述关节轴,上述外壳包括构成为上述机械臂的外壳的第1部分,上述传感器检测上述马达的旋转位置的变化量、上述马达的旋转速度的变化量或者上述马达中流动的电流值的变化量作为由上述第2物体经由上述第1部分施加于上述第1物体的外力。
例如,上述第2物体可以为人体,构成为与上述人体配合来进行作业的工业用机器人。
能够提供可充分对从第1物体向第2物体传递的冲击进行缓和且能够基于传感器的检测值如所希望那样抑制第1物体以及外壳的动作的缓冲装置以及具备该缓冲装置的机器人。
附图说明
图1是表示本发明的一个实施方式所涉及的缓冲装置以及具备该缓冲装置的机器人与人体配合来进行作业的作业现场的样子的俯视图。
图2是表示本发明的一个实施方式所涉及的缓冲装置以及具备该缓冲装置的机器人的整体结构的简图。
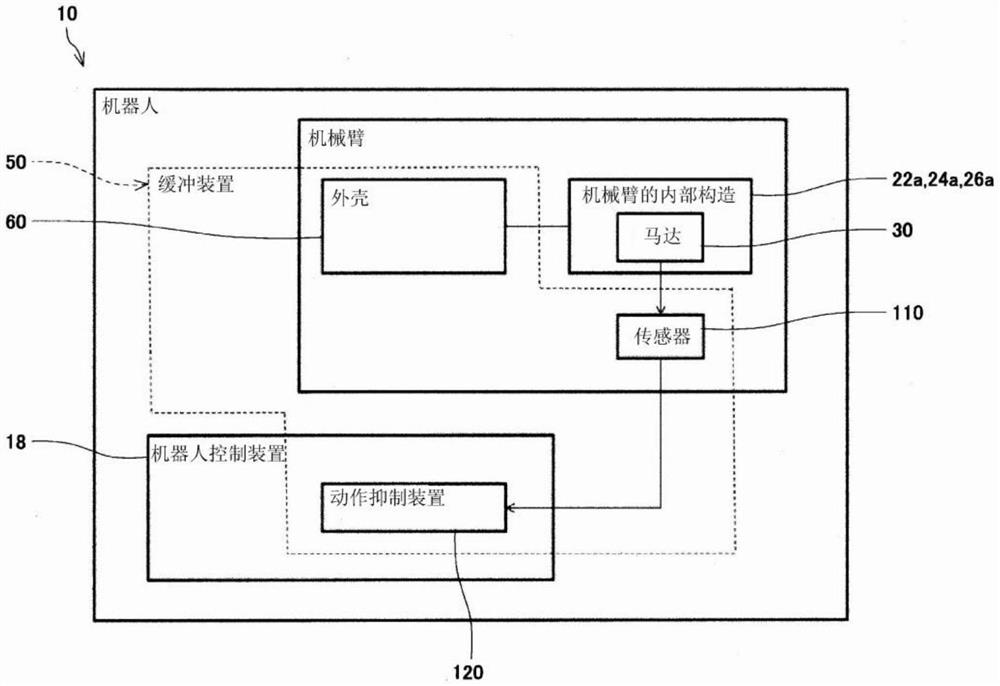
图3是表示本发明的一个实施方式所涉及的缓冲装置以及具备该缓冲装置的机器人的整体结构的框图。
图4是表示本发明的一个实施方式所涉及的缓冲装置的第1外壳被打开的状态的立体图,(A)是从外侧观察时的图,(B)是从内侧观察时的图。
图5是表示用于将本发明的一个实施方式所涉及的缓冲装置的一对第1外壳主体彼此相互固定的卡扣配合(Snap fit)构造的简图,(A)是表示进行固定之前的状态的图,(B)是表示固定之后的状态的图。
图6是表示本发明的一个实施方式所涉及的缓冲装置的第1外壳被安装于腕部的状态的图,(A)是从正面侧观察的立体图,(B)是从背面侧观察的立体图。
图7是表示本发明的一个实施方式所涉及的缓冲装置的第1外壳与机器人的内部构造的位置关系的图,(A)是表示腕部的基端部的图,(B)是表示腕部的中央部的图,(C)是表示腕部的前端部的图。
图8是表示本发明的一个实施方式所涉及的缓冲装置的第1外壳背面部的变形例的图。
图9是表示本发明的一个实施方式所涉及的缓冲装置的第2外壳被安装于机器人的第1连杆之前的状态的图,(A)是表示该第2外壳、第1连杆以及装饰板的立体图,(B)是表示第2外壳的固定部及其周边部分的剖视图。
图10是表示本发明的一个实施方式所涉及的缓冲装置的第2外壳被安装于机器人的第1连杆的状态的图,(A)是立体图,(B)是表示固定部及其周边部分的剖视图。
图11是从内侧观察本发明的一个实施方式所涉及的缓冲装置的第3外壳被打开的状态时的立体图。
图12是表示本发明的一个实施方式所涉及的缓冲装置的第3外壳被安装于机器人的第2连杆的状态的图,(A)是从第1面侧观察时的立体图,(B)是从第2面侧观察时的立体图,(C)是表示固定部及其周边部分的剖视图。
图13是用于对本发明的一个实施方式所涉及的缓冲装置的效果进行说明的简要的剖视图,(A)是由人体对外壳施加外力之前的图,(B)是由人体施加了外力时的图。
图14是用于对发明人们为了确认本发明的一个实施方式所涉及的缓冲装置的效果而进行的实验加以说明的简图。
图15是表示发明人们为了确认本发明的一个实施方式所涉及的缓冲装置的效果而进行的实验结果的图表。
图16是表示以往存在的缓冲装置的第1外壳与机器人的内部构造的位置关系的图,(A)是表示腕部的基端部的图,(B)是表示腕部的中央部的图,(C)是表示腕部的前端部的图。
图17是用于对以往存在的缓冲装置进行说明的简要的剖视图,(A)是由人体对外壳施加外力之前的图,(B)是表示由人体施加了外力时的图。
具体实施方式
以下,参照附图对本发明的一个实施方式所涉及的缓冲装置以及具备该缓冲装置的机器人进行说明。其中,本发明并不被本实施方式限定。另外,以下贯穿全部的附图,对相同或者相当的要素标注相同的参照附图标记,并省略其重复的说明。
(机器人10)
图1是表示本实施方式所涉及的缓冲装置以及具备该缓冲装置的机器人与人体配合来进行作业的作业现场的样子的俯视图。如图1所示,本实施方式所涉及的机器人10构成为在作业现场S与人体P、P′(第2物体)配合来进行作业的工业用机器人。具体而言,机器人10在与作业现场S的传送带C邻接的位置被设置于人体P与人体P′之间的相当于一个人量的受限的空间(例如610mm×620mm)。而且,机器人10能够对于由传送带C依次输送来的多个工件W与人体P、P′配合来进行作业。
图2是表示本实施方式所涉及的缓冲装置以及具备该缓冲装置的机器人的整体结构的简图。如图2所示,机器人10具备被固定于台车的基座12、被收纳于基座12内的在图1中用虚线表示的机器人控制装置18、以及被支承于基座12的一对机械臂20a、20b。其中,在机械臂20a、20b的前端可以分别安装有用于对于工件W进行把持等作业的末端执行器,但这里省略其图示以及说明。
(一对机械臂20a、20b)
一对机械臂20a、20b分别是构成为能够相对于基座12移动的水平多关节型的机械臂。一对机械臂20a、20b能够分别独立动作或者相互关联动作。其中,机械臂20b具有与机械臂20a同样的结构。因此,这里仅对机械臂20a进行说明,适当地省略机械臂20b的同样的说明。
机械臂20a具有关节部J1~J4(关节轴)。而且,在机械臂20a以与关节部J1~J4建立对应的方式设置有驱动用的马达30(参照图3)。机械臂20a具有第1连杆22及第2连杆24和腕部26。
第1连杆22通过利用旋转式的关节部J1与固定于基座12的上表面的基轴14连结而能够绕被规定为通过基轴14的轴心的旋转轴L1进行转动。第2连杆24通过利用旋转式的关节部J2与第1连杆22的前端连结而能够绕在第1连杆22的前端规定的旋转轴L2进行转动。
腕部26具有供末端执行器(未图示)安装的机械接口27,并经由直动式的关节部J3以及旋转式的关节部J4与第2连杆24的前端连结。腕部26借助直动式的关节部J3能够相对于第2连杆24升降移动。另外,腕部26借助旋转式的关节部J4能够绕与第2连杆24垂直的旋转轴L3转动。
机械臂20a的第1连杆22的旋转轴L1与机械臂20b的第1连杆22的旋转轴L1存在于同一直线上,机械臂20a的第1连杆22与机械臂20b的第1连杆22被配置为在上下设置有高低差。
机器人控制装置18的具体结构并不特别限定,例如也可以是通过公知的处理器(CPU等)根据储存于存储部(存储器)的程序进行动作而实现的结构。
(缓冲装置50)
图3是表示本实施方式所涉及的缓冲装置以及具备该缓冲装置的机器人的整体结构的框图。如图3所示,机器人10还具备用于对传递至该机器人10的内部构造(第1物体)的冲击进行缓和的缓冲装置50。其中,在本实施方式中,机器人10的内部构造包括设置于机器人10内的构造物(例如设置于机械臂20a、20b内的马达30、后述的第1连杆的内部构造22a、第2连杆的内部构造24a、以及腕部的内部构造26a等)。
本实施方式所涉及的缓冲装置50具备外壳60,该外壳60包含机器人10的内部构造(第1物体),并由具有挠性的弹性体构成。另外,缓冲装置50还具备传感器110,该传感器110用于检测由人体P、P′(第2物体)经由外壳60施加于机器人10的内部构造的外力。而且,缓冲装置50还具备动作抑制装置120,该动作抑制装置120用于基于传感器110的检测值来抑制机器人10(机器人10的内部构造以及外壳60等)的动作。
(外壳60)
外壳60构成为机器人10的外壳。具体而言,外壳60包括:第1外壳70,构成为机械臂20a的腕部26的外壳;第2外壳80,构成为机械臂20a的第1连杆22的外壳;以及第3外壳90,构成为第1机械臂20a的第2连杆24的外壳。即,在本实施方式中,外壳60构成为第1机械臂20a(以及第2机械臂20b)的内部构造的外壳。
外壳60(即第1外壳70、第2外壳80以及第3外壳90分别)为薄壁,在外壳60与机器人10的内部构造之间设置有间隙。上述薄壁的厚度可以为5.0mm以下。并且,该薄壁的厚度也可以为1.0mm以上2.0mm以下。
另外,构成外壳60的弹性体还具有非压缩性。其中,这里所说的非压缩性是指在被人体P、P′等(第2物体)施加了外力时其密度(或者体积)在弹性变形的前后不变化(或者几乎不变化)的性质。
并且,构成外壳60的弹性体由非发泡树脂形成。而且,该非发泡树脂的主成分为聚乙烯。
聚乙烯可以是LDPE(Low Density Polyethylene,低密度聚乙烯)。或者,聚乙烯例如也可以是HDPE(High Density Polyethylene,高密度聚乙烯)、LLDPE(Linear LowDensity Polyethylene,直链低密度聚乙烯)、MPE(Metallocene Polyethylene,通过茂金属催化剂聚合而成的聚乙烯)、EVA(Ethylene-VinylAcetate,乙烯醋酸乙烯酯)、或者UHMWPE(Ultra High Molecular Weight Polyethylene,超高分子量聚乙烯)等,也可以是将它们混合而成的物质。
并且,外壳60的与机器人10的内部构造对置的内表面是平滑的。
外壳60还包括构成为机械臂20b的外壳的第1外壳70、第2外壳80以及第3外壳90,但这些构造与构成为机械臂20a的外壳的那些外壳相同。因此,以下除了特别需要的情况之外,仅对第1机械臂20a的外壳进行说明,适当地省略关于第2机械臂20b的同样的说明。
(第1外壳70)
图4是本实施方式所涉及的缓冲装置的第1外壳被打开的状态的立体图,(A)是从外侧观察时的图,(B)是从内侧观察时的图。如图4所示,第1外壳70具有一对第1外壳主体72a、72b和将第1外壳主体72a的基端部的背面侧与第1外壳主体72b的基端部的背面侧相互连接的第1外壳背面部76。
一对第1外壳主体72a、72b分别具有大致碗形形状沿上下连设2个以便能够配合来内包腕部的内部构造26a的形状。
第1外壳70例如能够按照如下那样的顺序被安装于腕部的内部构造22a。
首先,如图4的(A)所示,以第1外壳背面部76为中心将第1外壳主体72a、72b展开而使第1外壳70处于打开的状态。
接下来,从上方滑动来相对于腕部的内部构造26a安装第1外壳背面部76的内表面。
然后,将第1外壳主体72a从与第1外壳背面部76的连接部向内侧折弯,且将第1外壳主体72b从与第1外壳背面部76的连接部向内侧折弯,以便第1外壳主体72a的内表面与第1外壳主体72b的内表面隔着腕部的内部构造26a相互对置。
最后,通过第1外壳主体72a、72b的在与大致碗形形状的第2连杆24相反侧的沿高度方向延伸的端缘设置的卡扣配合构造73(参照图4)将该第1外壳主体72a、72b彼此相互固定。
图5是表示本实施方式所涉及的缓冲装置的用于将一对第1外壳主体彼此相互固定的卡扣配合构造的简图,(A)是表示固定之前的状态的图,(B)是表示固定之后的状态的图。如图5所示,卡扣配合构造73是使设置于第1外壳主体72a、72b中的任一方的公部73a和设置于其中的另一方的母部73b利用公部73a的弹性变形来相互卡合的公知构造。
其中,卡扣配合构造73可以在第1外壳主体72a、72b的与大致碗形形状的第2连杆24相反侧的沿高度方向延伸的端缘以在高度方向相互空开间隔的方式设置有多个。由此,能够将第1外壳主体72a、72b彼此稳固地固定。另外,卡扣配合构造73也可以分别设置于第1外壳主体72a、72b的内表面。由此,由于若将第1外壳70安装于腕部的内部构造26a,则卡扣配合构造73从外部无法目视观察,所以能够使美观提高,另外,能够规避卡扣配合构造73钩挂到其他物体等的担忧。
图6是表示本实施方式所涉及的缓冲装置的第1外壳被安装于腕部的状态的图,(A)是从正面侧观察的立体图,(B)是从背面侧观察的立体图。如图6所示,第1外壳70具有向厚度方向的外侧(即与腕部的内部构造26a相反一侧)突出的弯曲部101。通过第1外壳主体72a、72b的与大致碗形形状的第2连杆24相反侧的沿高度方向延伸的端缘被卡扣配合构造73固定,由此从第1外壳70的基端部遍及至前端部形成该弯曲部101。
此外,腕部的内部构造26a的一部分可以从第1外壳70露出。如图6的(B)所示,在第1外壳背面部76设置有通气口77,该通气口77用于将从腕部的内部构造26a产生的热向外部排出。
图7是表示本实施方式所涉及的缓冲装置的第1外壳与机器人的内部构造的位置关系的图,(A)是表示腕部的基端部的图,(B)是表示腕部的中央部的图,(C)是表示腕部的前端部的图。如图7所示,通过第1外壳70形成为薄壁,从而在腕部的内部构造26a与第1外壳70之间设置有间隙。由此,从腕部26的基端部遍及至前端部形成内部空间79。
图8是表示本实施方式所涉及的缓冲装置的第1外壳背面部的变形例的图。如图8所示,可以将通气口77的一部分开口,并在此设置散热片78。由此,能够将从腕部的内部构造26a产生的热向外部进一步排出。
(第2外壳80)
图9是表示本实施方式所涉及的缓冲装置的第2外壳被安装于机器人的第1连杆之前的状态的图,(A)是表示该第2外壳、第1连杆以及装饰板的立体图,(B)是表示第2外壳的固定部及其周边部分的剖视图。
如图9的(A)所示,第2外壳80具有一对第2外壳主体82a、82b。一对第2外壳主体82a、82b具有相互相同的形状。一对第2外壳主体82a、82b配合而以覆盖第1连杆的内部构造22a的侧面的整个区域、上表面以及底面的缘部的方式被安装于第1连杆的内部构造22a。
在一对第2外壳主体82a、82b的内表面分别设置有多处用于固定到第1连杆的内部构造22a的侧面的固定部84。如图9的(B)所示,该固定部84分别具有一侧的主面被固定于一对第2外壳主体82a、82b的内表面的海绵泡沫85和设置于海绵泡沫85的另一侧的主面的面接合件86。
海绵泡沫85例如具有柔软性,由因被施加外力而容易变形且若不再被施加该外力则能够容易地恢复为原本的形状的、一般在厨房中使用的海绵那样的材料形成。即,海绵泡沫85能够容易地发生弹性变形。
其中,面接合件86可以通过粘接剂等被安装于海绵泡沫85的主面。在第1机械臂20a的第1连杆22的上表面安装有装饰板23,但在第2机械臂20b的第1连杆不安装装饰板23。
第2外壳80例如通过使第2外壳主体82a与第2外壳主体82b相互上下反转而与第1连杆的内部构造22a的侧面抵接,由此面接合件86固定在设置于对应的位置的第1连杆的内部构造22a的面接合件87,能够安装于第1连杆的内部构造22a。其中,第2外壳主体82a、82b的面接合件86是钩构造与环构造中的任一方,第1连杆的内部构造22a的面接合件87是钩构造与环构造双方中的另一方。
图10是表示本实施方式所涉及的缓冲装置的第2外壳被安装于机器人的第1连杆的状态的图,(A)是立体图,(B)是表示固定部及其周边部分的剖视图。
第2外壳主体82a与第2外壳主体82b通过设置于各自的端面的嵌合构造而相互固定。其中,该嵌合构造可以是与第1外壳70同样的卡扣配合构造,或者也可以是设置有销和与之对应的销承接部的公知的嵌合构造。
如图10的(B)所示,一对第2外壳主体82a、82b分别通过多个固定部84被固定于第1连杆的内部构造22a的侧面。具体而言,通过将一对第2外壳主体82a、82b分别向第1连杆的内部构造22a按压,从而将固定部84的面接合件86固定于在第1连杆的内部构造22a的侧面设置的面接合件87,然后通过解除按压,使得海绵泡沫85发生弹性变形而保证沿着第1连杆的内部构造22a的侧面侧延伸的状态,由此一对第2外壳主体82a、82b被固定于第1连杆的内部构造22a的侧面。
其中,如图10的(A)所示,第2外壳80与第1外壳70同样,具有向厚度方向的外侧(即与第1连杆的内部构造22a相反侧)突出的弯曲部102。通过第2外壳主体82a、82b各自的沿高度方向延伸的两端缘被固定,从而遍及第2外壳80的基端侧与前端侧各自的高度方向的整个区域形成该弯曲部102。
(第3外壳90)
图11是表示从内侧观察本实施方式所涉及的缓冲装置的第3外壳被打开的状态时的立体图。如图11所示,第3外壳90具有一对第3外壳主体92a、92b。一对第3外壳主体92a、92b分别具有用于覆盖第2连杆24的侧面的第3外壳侧部93、用于覆盖第2连杆24的第1面的一部分的第3外壳一方面部94、以及用于覆盖第2连杆24的第2面的一部分的第3外壳另一方面部95。
在图11中,一对第3外壳主体92a、92b各自的第3外壳侧部93是弯曲为从上方观察向外侧突出的形状,沿上下方向延伸的缘部彼此被连接为能够相互向内侧方向折叠。在一对第3外壳主体92a、92b各自的第3外壳侧部93的内表面设置有多个固定部96,该固定部96是与在一对第2外壳主体82a、82b的内表面设置的固定部84同样的结构。即,该固定部96具有将一侧的主面固定于一对第3外壳主体92a、92b的内表面的海绵泡沫97和被固定于海绵泡沫97的另一侧的主面的面接合件98。
在图11中,第3外壳一方面部94从第3外壳侧部93的下端缘向内侧沿水平方向延伸。其中,在第3外壳一方面部94的内表面分别设置有与设置于第3外壳侧部93的同样的固定部96。另外,第3外壳另一方面部95从第3外壳侧部93的上端缘向内侧沿水平方向延伸。
第3外壳90例如通过将第3外壳主体92a与第3外壳主体92b从彼此的连接部向内侧折叠、使它们与第2连杆的内部构造24a的侧面抵接,从而将面接合件98固定到在对应的位置设置的第3连杆的内部构造24a的面接合件99,能够安装于第2连杆的内部构造24a。其中,第3外壳主体92a、92b的面接合件98是面接合件的公知的钩构造与环构造中的任一方,第2连杆的内部构造24a的面接合件99是钩构造与环构造的另一方。
图12是表示本实施方式所涉及的缓冲装置的第3外壳被安装于机器人的第2连杆的状态的图,(A)是从第1面侧观察时的立体图,(B)是从第2面侧观察时的立体图,(C)是表示固定部及其周边部分的剖视图。
第3外壳主体92a与第3外壳主体92b通过在各自的与连接为能够折叠的端面相反侧的端面设置的嵌合构造被相互固定。其中,该嵌合构造可以是与第1外壳70同样的卡扣配合构造,或者也可以是设置有销和与之对应的销承接部的公知的嵌合构造。
如图12的(C)所示,一对第3外壳主体92a、92b分别通过多个固定部96被固定于第2连杆的内部构造24a。其中,由于该固定的方式与上述说明的将第1连杆的内部构造22a与第2外壳80固定的情况同样,因而这里不重复其说明。
其中,如图12的(A)、(B)所示,第3外壳90与第1外壳70以及第2外壳80同样,具有向厚度方向的外侧(即与第2连杆的内部构造24a相反侧)突出的弯曲部103。通过第3外壳主体92a、92b各自的沿高度方向延伸的与可折叠的连接部相反侧的端缘被固定,从而遍及该端缘的高度方向的整个区域形成该弯曲部103。
(传感器110)
再次参照图2,传感器110检测马达30的旋转速度的变化量,作为由人体P、P′经由机械臂20a、20b的外壳60(第1部分)对机器人10的内部构造施加的外力。
(动作抑制装置120)
如图2所示,动作抑制装置120可以构成为机器人控制装置18的一部分。该动作抑制装置120的具体结构不特别限定,例如可以是通过公知的处理器(CPU等)根据储存于存储部(存储器)的程序进行动作来实现的结构。
此外,动作抑制装置120例如可以通过停止机器人10的动作来抑制该机器人10的动作。或者,动作抑制装置120例如也可以通过减缓机器人10的速度或者加速度来抑制该机器人10的动作,还可以通过其他方式来抑制该机器人10的动作。
(效果)
这里,为了对本实施方式所涉及的缓冲装置50所起到的效果进行说明,基于图16、17对以往存在的缓冲装置200进行说明。图16是表示以往存在的缓冲装置的第1外壳与机器人的内部构造的位置关系的图,(A)是表示腕部的基端部的图,(B)是表示腕部的中央部的图,(C)是表示腕部的前端部的图。图17是用于对以往存在的缓冲装置进行说明的简要的剖视图,(A)是由人体对外壳施加外力之前的图,(B)是由人体施加了外力时的图。
如图17所示,以往存在的缓冲装置200的外壳210(以下,称为“以往存在的外壳210”)为厚壁。该厚壁的厚度例如为10mm以上15mm以下左右。其中,以往存在的外壳210以发泡聚氨酯为主成分而形成。如图17所示,以往存在的外壳210以若被人体P等施加外力则通过施加了上述外力的部分被压缩而体积变小(或者密度变大)来缓和向机器人的内部构造(这里为腕部的内部构造26′)传递的冲击的方式发挥功能。
然而,这样的冲击的缓和方式在对向机器人的内部构造26′传递的冲击进行缓和的程度上存在改善的余地。另外,相对于外壳210的体积的变化而反推人体P等的外壳210的弹力的变化仅线性变化。换言之,在外壳210的体积的变化比较小的阶段(即由人体P等对外壳210施加的外力比较小的阶段),反推人体P等的外壳210的弹力不会大幅度变化。由此,即便由人体P等对外壳210施加了外力,传感器也无法感知该外力,存在对机器人的动作进行抑制的动作抑制装置不会基于上述传感器的检测值如所希望那样工作的情况。其结果是,在以往存在的缓冲装置200中,存在无法如所希望那样抑制机器人的动作的情况。
并且,以往存在的外壳210由于如上述那样为厚壁,所以如图17所示,其内表面与机器人的内部构造相互抵接或者大致抵接。因此,在由人体P等施加了外力时,由于外壳210的体积变化被机器人的内部构造妨碍,所以存在不充分实现缓冲功能这一问题。另外,难以配置应该插入至外壳210与机器人的内部构造之间的线束等结构。并且,该线束等结构在如上述那样配置之后,容易与外壳210以及机器人的内部构造接触,由此容易损伤。
另一方面,本实施方式所涉及的缓冲装置50由于具备外壳60,且该外壳60由具有挠性的弹性体构成,所以能够充分缓和向机器人10的内部构造(第1物体)传递的冲击。
图13是用于对本实施方式所涉及的缓冲装置的效果进行说明的简要的剖视图,A)是由人体对外壳施加外力之前的图,(B)是由人体施加了外力时的图。如图13所示,外壳60(这里为第1外壳70)以被人体P等施加了外力的部分遍及其厚度方向的整个区域向内部空间79(间隙)挠曲的方式发生弹性变形。由此,能够充分地缓和从机器人10的内部构造(这里为腕部的内部构造26a、第1物体)向人体P等(第2物体)传递的冲击。
另外,在由人体P等对外壳60施加的外力比较小的阶段,反推人体P等的外壳60的弹力比上述以往存在的外壳210的情况迅速地增加。因此,能够利用传感器110高精度地检测由人体P等施加于外壳60的外力或者由人体P等经由外壳60施加于机器人10的内部构造的外力。由此,动作抑制装置120能够基于传感器110的检测值如所希望那样抑制机器人10的内部构造以及外壳60的动作。
另外,由于外壳60为薄壁,在机器人10的内部构造与外壳60之间形成有间隙,所以外壳60能够良好地发生弹性变形而不会被机器人10的内部构造、线束等其他物体妨碍。另外,容易配置应该插入至外壳60与机器人10的内部构造之间的线束等结构。并且,由于该线束等结构在如上述那样配置之后难以与外壳60以及机器人10的内部构造接触,所以能够抑制损伤。
并且,在本实施方式中,通过上述薄壁的厚度为5.0mm以下,使得外壳60能够良好地发生弹性变形。并且,通过上述薄壁的厚度为1.0mm以上2.0mm以下,使得外壳60能够进一步良好地发生弹性变形。
而且,由于构成外壳60的弹性体还具有非压缩性,所以如图13所示,外壳60能够良好地发生弹性变形。
另外,由于构成外壳60的弹性体由非发泡树脂形成,所以能够容易地形成外壳。例如,能够容易且廉价地通过注塑成形来形成外壳60。另外,外壳60能够良好地发生弹性变形。
由于外壳60的至少一部分具有向厚度方向的外侧突出的弯曲部101、102、103,所以反推人体P等的外壳60的弹力比上述以往存在的外壳210的情况进一步迅速地增加。因此,能够利用传感器110进一步高精度地检测由人体P等施加于外壳60的外力或者由人体P等经由外壳60施加于机器人10的内部构造的外力。
并且,在本实施方式中,由于外壳60的与机器人10的内部构造对置的内表面是平滑的(即未形成肋等),所以能够容易地形成外壳60。另外,由于肋等不会与机器人10的内部构造、线束等其他物体抵接,所以外壳60能够良好地发生弹性变形而不会被上述其他物体妨碍。
另外,传感器110检测马达30的旋转速度的变化量,作为由人体P等经由机械臂20a、20b的外壳60(第1部分)向机械臂20a、20b的内部构造施加的外力。由此,例如不需要如以往存在的外壳210那样内置接触传感器、接近传感器等来检测由人体P等施加的外力。因此,能够使外壳60为薄壁来良好地发生弹性变形。
(变形例)
本领域技术人员根据上述说明来对本发明的很多改进、其他实施方式是显而易见的。因此,上述说明应该仅被解释为例示,以将执行本发明的最佳方式教导给本领域技术人员的目的而提供。能够不脱离本发明的精神地实际变更其详细构造以及/或者功能。
在上述实施方式中,对第1连杆的内部构造22a与第2外壳80被包括面接合件的固定部84固定的情况进行了说明,但并不限定于此。例如,第1连杆的内部构造22a与第2外壳80也可以使用螺钉部件来相互固定。由此,能够相互位置不偏移而容易地固定。此外,关于第2连杆的内部构造24a与第3外壳90也同样。
在上述实施方式中,对外壳60构成为第1机械臂20a以及第2机械臂20b的外壳的情况进行了说明,但并不限定于此。例如,只要能够通过机器人控制装置18等控制基座12的动作,则外壳60可以构成为基轴14的外壳,也可以构成为该基座12的外壳。
在上述实施方式中,对传感器110检测马达30的旋转速度的变化量作为由人体P、P′(第2物体)经由外壳60对机器人10的内部构造施加的外力的情况进行了说明,但并不限定于此。例如,传感器110也可以检测马达30的旋转位置的变化量或者马达30中流动的电流值的变化量作为由人体P、P′(第2物体)经由外壳60对机器人10的内部构造施加的外力。
在上述实施方式中,对传感器110检测由人体P、P′(第2物体)经由外壳60施加于机器人10的内部构造的外力、动作抑制装置120基于该传感器110的检测值来抑制机器人10的动作的情况进行了说明,但并不限定于此。例如,传感器110也可以检测由人体P、P′施加于外壳60的外力、或者与上述外力的任一个(即由人体P、P′经由外壳60施加于机器人10的内部构造的外力、或者由人体P、P′施加于外壳60的外力的任一个)对应的物理量,动作抑制装置120基于该传感器110的检测值来抑制机器人10的动作。其中,与上述外力的任一个对应的物理量例如可以是外壳60的挠曲量等,或者也可以是其他物理量。
在上述实施方式中,对构成外壳60的性体由非发泡树脂形成、该非发泡树脂的主成分为聚乙烯的情况进行了说明,但并不限定于此。也可以是构成外壳60的弹性体由非发泡树脂形成,该非发泡树脂的主成分例如是聚丙烯、聚碳酸酯、乙烯乙酸乙烯酯、烯烃系弹性体、苯乙烯系弹性体、聚酰胺(尼龙)、聚苯乙烯、聚缩醛、聚氨基甲酸乙酯、聚对苯二甲酸乙二醇酯、氯乙烯、或者聚乳酸等。另外,构成外壳60的弹性体也可以由发泡树脂形成。
在上述实施方式中,对机器人10的第1机械臂20a以及第2机械臂20b分别具有4个关节轴JT1~JT4的情况进行了说明,但并不限定于此。例如第1机械臂20a以及第2机械臂20b分别可以具有1个以上3个以下的关节轴,或者可以具有5个以上的关节轴。而且,缓冲装置50可以具备能够分别适当地包含上述那样的机械臂那样的外壳60以及其他结构。
在上述实施方式中,对机器人10构成为具有第1机械臂20a以及第2机械臂20b的双臂的水平多关节型机器人的情况进行了说明,但并不限定于此。例如,机器人10可以构成为单臂的水平多关节型机器人。或者,机器人10可以构成为极坐标型机器人,也可以构成为圆柱坐标型机器人,还可以构成为直角坐标型机器人,也可以构成为垂直多关节型机器人,或者可以构成为其他机器人。而且,缓冲装置50可以具备能够分别适当地包含上述那样的机器人那样的外壳60以及其他结构。
在上述实施方式中,对机器人10构成为在作业现场S与人体P、P′(第2物体)配合来进行作业的工业用机器人的情况进行了说明,但并不限定于此。例如,机器人10可以构成为所谓的娱乐机器人,或者可以构成为其他机器人。
在上述实施方式中,对第2物体是在作业现场S与机器人10配合来进行作业的人体P、P′的情况进行了说明,但并不限定于此。例如,第2物体也可以是在作业现场S与机器人10配合来进行作业的周边设备,也可以是配置于作业现场S的其他物体。另外,当在与作业现场S不同的场所配置机器人10的情况下,第2物体也可以是存在于该场所的人体、其他物体等。
在上述实施方式中,对缓冲装置50被装备于机器人10、第1物体为机器人10的内部构造、外壳60为上述机器人的外壳的情况进行了说明,但并不限定于此。例如,缓冲装置50(以及外壳60)可以被装备于具有与机器人10不同的构造的机器人(第1物体),也可以设置于机器人以外的电气设备(同上),或者也可以设置于其他的第1物体。
(实验例)
以下,对发明人们为了确认本发明的效果而进行的实验例进行说明。图14是用于对发明人们为了确认本实施方式所涉及的缓冲装置的效果而进行的实验进行说明的简图。图15是表示该实验结果的图表。
如图14所示,制作了模仿在述实施方式中说明的第1外壳70的样品240作为实施例。该实施例以LDPE(Low Density Polyethylene,低密度聚乙烯)为主成分并通过非发泡树脂注塑成形。另外,制作了同样形状的图14所示的以往存在的第1外壳的样品240′作为比较例。该比较例是二液混合型的发泡聚氨酯。
如图14所示,将实施例以及比较例分别载置于平台254,一边利用高度计250调整高度位置一边利用推拉力计252按压与上述实施方式的弯曲部101对应的高度位置最高的中央部。由此,针对实施例以及比较例分别测定了伴随着挠曲量的变化的弹力(即反推推拉力计252的力)。
在图15中示出了实验结果。在图15中,每隔2mm挠曲量标注“△”的实线的测定值是实施例,同样地标注“*”的虚线的测定值是比较例。
如图15所示,在比较例中,测定值为线性,且在挠曲量比较小的阶段(即在比较例中所施加的外力比较小的阶段),反推推拉力计252的弹力不怎么变化。
另一方面,在实施例中,测定值为非线性,在挠曲量比较小的阶段(即在实施例中所施加的外力比较小的阶段,具体为0mm以上4mm以下的范围附近),反推推拉力计252的弹力急剧地增加。即,在实施例中,反推推拉力计252的弹力与比较例相比迅速地增加。根据以上的结果,能够确认本发明所涉及的缓冲装置的效果。
附图标记说明:
10…机器人;12…基座;14…基轴;18…机器人控制装置;20a、20b…机械臂;22…第1连杆;22a…第1连杆的内部构造;23…装饰板;24…第2连杆;24a…第2连杆的内部构造;26…腕部;26a…腕部的内部构造;27…机械接口;30…马达;50…缓冲装置;60…外壳;70…第1外壳;72…第1外壳主体;73…卡扣配合构造;73a…公部;74b…母部;76…第1外壳背面部;77…通气口;78…散热片;79…内部空间;80…第2外壳;82…第2外壳主体;84、96…固定部;85…海绵泡沫;86、87、98、99…面接合件;90…第3外壳;92…第3外壳主体;93…第3外壳侧部;94…第3外壳一方面部;95…第3外壳另一方面部;97…海绵泡沫;101、102、103…弯曲部;110…传感器;120…动作抑制装置;200…以往存在的缓冲装置;210…以往存在的外壳;240…样品;250…高度计;252…推拉力计;254…平台;J1~J4…关节部;L1、L2…旋转轴;C…传送带;P…人体;S…作业现场;W…工件。
- 缓冲装置以及具备该缓冲装置的机器人
- 一种具备缓冲装置的高速公路防护栏