用于盾构机单滚刀更换的单向负载机械臂电液作动器单元
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及液压机器人领域的一种机械臂电液作动器,尤其涉及一种用于全断面掘进机单滚刀更换的机械臂电液作动器单元。
背景技术
全断面掘进机施工过程中刀具消耗大、更换频繁,换刀作业时间占隧道施工周期的10%以上,现有换刀工作主要依赖人工作业,大埋深、高水压等施工环境下作业安全隐患大,易出现人员伤亡等重大安全事故。据统计,国内近70%的隧道施工安全事故都与人工换刀作业直接相关。随着我国地铁、公路、铁路等隧道建设工程量的增长,全断面掘进机的市场将不断扩大,以高效安全的“机器换人”作业模式实现换刀作业势在必行。全断面掘进机单滚刀更换需要换刀机器人具有耐高压、耐高湿、重载的能力,并且由于全断面掘进机中安装空间有限,要求机器人结构紧凑且具有大范围作业的能力,因此需要高度集成、输出功率大的高功率密度动力单元。传统机器人大多采用电机作为驱动,电机功率密度小,且耐高压、耐高湿能力欠佳,往往需要增设复杂的散热、防护机构,难以应用于全断面掘进机单滚刀更换的机械臂。
掘进机滚刀更换要求作动器具有耐高压、耐高湿、高功率密度、高度集成等特点。
电液驱动执行器(Electro-Hydrostatic Actuator,EHA)是一种将电机、泵、阀、缸、作动器等分立元件高度集成的一体化执行器,相对于传统的电机伺服控制系统具有体积小、液压输出力大、控制灵活等优点,目前在大型客机和先进战机的飞控系统中已得到了充分发展,然而在工业机器人中的应用中较少。执行器是全断面掘进机单滚刀更换机械臂的核心部分,电液作动器由于其集成度高、功重比大、可靠性高、效率高、安装维护性好等优点,十分适合作为换刀机械臂的驱动。
发明内容
为了解决背景技术中的问题,本发明提供了一种用于全断面掘进机单滚刀更换的机械臂电液作动器单元,以适应高压、高湿等恶劣工况,并满足结构紧凑、维护性好、功率密度高的特点。
本发明采用的技术方案如下:
本发明包括电液作动器和液压缸,电液作动器和液压缸连接;所述电液作动器包括EHA伺服电机、EHA阀块、EHA油箱和EHA双向高压柱塞泵,EHA伺服电机和EHA油箱安装于EHA阀块的两侧,EHA油箱内充满油液并装有EHA双向高压柱塞泵,EHA伺服电机的输出轴穿过EHA阀块的中心孔和EHA油箱内EHA双向高压柱塞泵的输入轴同轴连接。
所述的EHA阀块在中心孔水平的两侧均开设有一个平行于EHA伺服电机输出轴的中油箱流道,EHA阀块在中心孔上方的两侧均开设有一个平行于EHA伺服电机输出轴的上油箱流道,EHA阀块在中心孔下方的两侧开设有一个平行于EHA伺服电机输出轴的下油箱流道。
EHA阀块内部沿从EHA油箱到EHA伺服电机方向依次分为第一流通截面、第二流通截面、第三流通截面的三个流通截面;第一流通截面上的EHA阀块内部在两侧均设有一个竖直的第一截面主油道;两侧的第一截面主油道均经各自在EHA阀块内部开设的过渡水平流道分别和EHA阀块水平孔两侧的中油箱流道连接相通,两侧的第一截面主油道的过渡水平流道中从中油箱流道到第一截面主油道方向依次装有单向阀(129、130)和过滤器(128、131);第一流通截面顶部的EHA阀块表面开设两个溢流安装口,两个溢流安装口分别安装EHA第一溢流阀和EHA第二溢流阀,两个溢流安装口分别连通两侧的第一截面主油道;同时两个溢流安装口分别和EHA阀块水平孔两侧的上油箱流道连接相通,EHA第一溢流阀和EHA第二溢流阀的两端分别连接到各自溢流安装口所连接的第一截面主油道和上油箱流道;第一流通截面左右两侧的EHA阀块表面分别开设第一压力安装口和第二压力安装口,第二压力安装口下方的EHA阀块表面开设第三液控单向安装口,第一压力安装口、第二压力安装口、第三液控单向安装口分别安装EHA第一压力传感器、EHA第二压力传感器、EHA第三液控单向阀,第一压力安装口、第二压力安装口、第三液控单向安装口均连通到各自一侧的第一截面主油道。
EHA第三液控单向阀的进油端经自身所在一侧的下油箱流道和EHA油箱内连通,EHA第三液控单向阀的液控端和自身所在一侧的第一截面主油道连通,EHA第三液控单向阀的出油端经第一水平辅助油道连通和EHA第一压力传感器所在一侧的第一截面主油道连通;第二流通截面上的EHA阀块内部在两侧均设有一个竖直的第二截面主油道;两侧的第二截面主油道均经各自在EHA阀块内部开设的过渡水平流道分别和EHA阀块水平孔两侧的中油箱流道连接相通,两侧的第二截面主油道的过渡水平流道中装有单向阀;第二流通截面顶部的EHA阀块表面开设第二过渡接口,第二过渡接口安装EHA第二过渡接头,第二流通截面在左右两侧中一侧的EHA阀块表面从下到上分别开设第一液控单向安装口和第二液控单向安装口,第一液控单向安装口和第二液控单向安装口中分别安装EHA第一液控单向阀和EHA第二液控单向阀;第二液控单向安装口将EHA第二液控单向阀自身一侧所在的第二截面主油道和第二过渡接口连通,同时EHA第二液控单向阀自身一侧的另一侧的第二截面主油道经EHA阀块内部的流道和第二液控单向安装口连通;EHA第二液控单向阀的进油端连接到自身所在一侧的另一侧的第二截面主油道,EHA第二液控单向阀的出油端连接到第二过渡接口,EHA第二液控单向阀控制端连通到自身所在一侧的第二截面主油道。
EHA第一液控单向阀的进油端经自身所在一侧的下油箱流道和EHA油箱内连通,EHA第一液控单向阀的出油端经水平流道和自身所在一侧的另一侧的第二截面主油道连通,EHA第一液控单向阀的液控端和自身所在一侧的第二截面主油道连通;第三流通截面上的EHA阀块内部在两侧均设有一个竖直的第三截面主油道;第三流通截面顶部的EHA阀块表面开设第第一过渡接口、第一测压接口和第二测压接口,第一过渡接口、第一测压接口和第二测压接口安装EHA第一过渡接头、EHA第一测压接头和EHA第二测压接头;第三流通截面在左右两侧中一侧的EHA阀块表面开设平衡安装口,平衡安装口中分别安装EHA平衡阀;平衡安装口将EHA平衡阀自身一侧所在的第三截面主油道和第一过渡接口连通,同时EHA平衡阀自身一侧的另一侧的第三截面主油道经EHA阀块内部的流道和平衡安装口连通;EHA平衡阀的两个油口端分别连通到第一过渡接口和自身所在一侧的另一侧的第三截面主油道,EHA平衡阀控制端连通到自身所在一侧的第三截面主油道;三个流通截面在EHA阀块中心孔两侧的截面主油道通过在两侧各自的水平通道连通。
所述的液压缸安装在全断面掘进机刀盘的换刀机械臂上,所述液压缸包括缸筒第一组件、缸筒第二组件、缸筒第三组件和缸筒第四组件;活塞杆可轴向伸出/缩回活动地安装于液压缸前端的缸筒内,活塞杆和液压缸之间前端口之间通过液压缸前导向套导向和密封,活塞杆后端开设有轴向空腔;液压锁安装板焊接于缸筒第一组件外壁,液压锁阀板固定安装于液压锁安装板,液压锁安装在液压锁阀板上;液压锁阀板第一口与油缸B口通过油管连接,液压锁阀板第四口与油缸A口通过油管连接;传感器感应杆第二组件与缸筒第三组件后端固定连接,传感器感应杆第一组件前端安装在活塞杆轴向空腔内,传感器感应杆第一组件后端与传感器感应杆第二组件固定连接;传感器电子头与缸筒第四组件固定连接,传感器电子头与传感器感应杆第二组件通过通讯线缆连接;活塞杆轴向空腔的后端在传感器感应杆第一组件外围开设有环形凹槽,传感器位置磁铁与传感器非导磁隔离垫片通过过盈连接安装于活塞杆的环形凹槽内。
所述电液作动器从EHA第一过渡接头、EHA第二过渡接头分别引出一根液压软管连接至机械臂安装空间进油口,机械臂安装空间进油口再经由机械臂安装空间内部管路分别与液压锁阀板上的液压锁阀板第二口、液压锁阀板第三口连接。
所述的EHA阀块在朝向EHA油箱的端面设有一个凸起圆盘,凸起圆盘套装在EHA油箱的圆口端口内,凸起圆盘周面开设有环形槽,环形槽中安装EHA阀块O型密封圈,凸起圆盘和EHA油箱的圆口端口之间通过EHA阀块O型密封圈密封连接。
所述的EHA双向高压柱塞泵通过EHA柱塞泵固定螺栓组安装于EHA阀块的凸起圆盘的端面上,EHA双向高压柱塞泵输入轴穿过凸起圆盘端面的中心通孔后经EHA联轴器和EHA伺服电机的输出轴连接。
所述的EHA联轴器一端设有凸螺纹轴,另一端设有中间径向通槽,EHA联轴器凸螺纹轴一端与EHA伺服电机轴端内螺纹连接,限制轴向运动,同时通过EHA电机平键与EHA伺服电机轴端固定以限制周向转动,EHA联轴器径向通槽一端与EHA双向高压柱塞泵扁轴配合安装。
本发明的有益效果:
本发明设计了适用于高压高湿恶劣工况,并具有集成度高、功率密度大、可靠性高、安装维护性好等优点的电液作动器,作为全断面掘进机单滚刀更换的机械臂的动力单元,为其提供高精度大输出力驱动。
附图说明
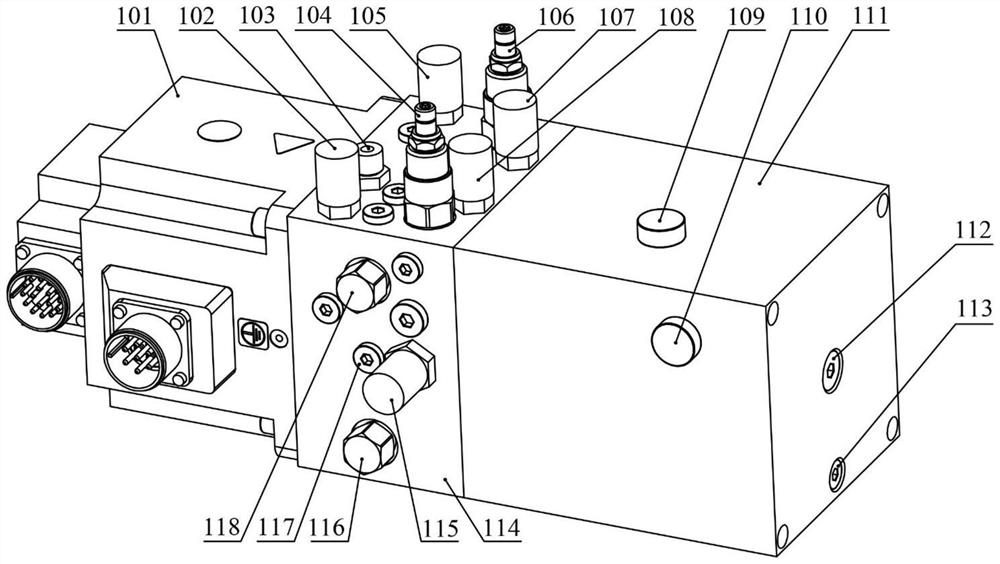
图1是本发明EHA整体装配示意图。
图2是本发明EHA双向高压柱塞泵装配示意图。
图3是本发明EHA联轴器装配示意图。
图4是本发明EHA联轴器示意图。
图5是本发明EHA的局部后视图。
图6是本发明图5的仰视图。
图7是本发明图5的A-A剖视图。
图8是本发明图5的B-B剖视图。
图9是本发明图5的C-C剖视图。
图10是图2的剖视图。
图11是本发明EHA液压原理图。
图12是本发明液压缸的剖视图。
图13是本发明液压缸的整体装配示意图。
图14是本发明液压缸的俯视图。
图15是本发明与全断面掘进机单滚刀更换机械臂的装配示意图。
图中:100-EHA;101-EHA伺服电机;102-EHA第一测压接头;103-EHA第一过渡接头;104-EHA第一溢流阀;105-EHA第二测压接头;106-EHA第二溢流阀;107-EHA第三测压接头;108-EHA第四测压接头;109-EHA空气过滤塞;110-EHA第一油镜;111-EHA油箱;112-EHA第一油箱螺堵;113-EHA第二油箱螺堵;114-EHA阀块;115-EHA第一压力传感器;116-EHA第一液控单向阀;117-EHA阀块螺堵组;118-EHA第二液控单向阀;119-EHA阀块O型密封圈;120-EHA双向高压柱塞泵;121-EHA柱塞泵固定螺栓组;122-EHA电机平键;123-EHA联轴器;124-EHA第二油镜;125-EHA平衡阀;126-EHA第二压力传感器;127-EHA第三液控单向阀;128-EHA第一过滤器;129-EHA第一单向阀;130-EHA第二单向阀;131-EHA第二过滤器;132-EHA第二过渡接头;133-EHA第三单向阀;134-EHA第四单向阀;
200-液压缸;201-活塞杆;202-液压锁;203-液压锁阀板;204-液压锁安装板;205-缸筒第一组件;206-传感器感应杆第一组件;207-缸筒第二组件;208-缸筒第三组件;209-传感器感应杆第二组件;210-缸筒第四组件;211-传感器电子头;212-传感器位置磁铁;213-传感器非导磁隔离垫片;214-液压缸前导向套;215-油缸A口;216-油缸B口;2031-液压锁阀板第一口;2032-液压锁阀板第二口;2033-液压锁阀板第三口;2034-液压锁阀板第四口;
301-换刀机械臂;302-机械臂安装空间进油口;303-全断面掘进机刀盘。
具体实施方式
下面结合附图和具体实施过程对本发明作进一步详细的说明。
如图1所示,具体实施的装置包括电液作动器100和液压缸200,电液作动器100和液压缸200连接;
电液作动器100包括EHA伺服电机101、EHA阀块114、EHA油箱111和EHA双向高压柱塞泵120,EHA伺服电机101和EHA油箱111通过螺栓安装于EHA阀块114的两侧,EHA油箱111内充满油液并装有EHA双向高压柱塞泵120,EHA伺服电机101的输出轴穿过EHA阀块114的中心孔和EHA油箱111内EHA双向高压柱塞泵120的输入轴同轴连接。
如图10所示,EHA阀块114在中心孔水平的两侧均开设有一个平行于EHA伺服电机101输出轴的中油箱流道,EHA阀块114在中心孔上方的两侧均开设有一个平行于EHA伺服电机101输出轴的上油箱流道,EHA阀块114在中心孔下方的两侧开设有一个平行于EHA伺服电机101输出轴的下油箱流道;
如图2所示,EHA阀块114在朝向EHA油箱111的端面设有一个凸起圆盘,凸起圆盘套装在EHA油箱111的圆口端口内,凸起圆盘周面开设有环形槽,环形槽中安装EHA阀块O型密封圈119,凸起圆盘和EHA油箱111的圆口端口之间通过EHA阀块O型密封圈119密封连接。
EHA双向高压柱塞泵120通过EHA柱塞泵固定螺栓组121安装于EHA阀块114的凸起圆盘的端面上,EHA双向高压柱塞泵120输入轴穿过凸起圆盘端面的中心通孔后经EHA联轴器123和EHA伺服电机101的输出轴连接。
具体实施中,如图4所示,EHA联轴器123一端设有凸螺纹轴,另一端设有中间径向通槽,如图3所示,EHA联轴器123凸螺纹轴一端与EHA伺服电机101轴端内螺纹连接,限制轴向运动,同时通过EHA电机平键122与EHA伺服电机101轴端固定以限制周向转动,EHA联轴器123径向通槽一端与EHA双向高压柱塞泵120扁轴配合安装,EHA伺服电机101通过EHA联轴器123带动EHA双向高压柱塞泵120扁轴转动。
如图1、图5和图6所示,EHA第一测压接头102、EHA第一过渡接头103、EHA第一溢流阀104、EHA第二测压接头105、EHA第二溢流阀106、EHA第三测压接头107、EHA第四测压接头108、EHA第一压力传感器115、EHA第一液控单向阀116、EHA阀块螺堵组117、EHA第二液控单向阀118、EHA平衡阀125、EHA第二压力传感器126、EHA第三液控单向阀127、EHA第一过滤器128、EHA第一单向阀129、EHA第二单向阀130、EHA第二过滤器131、EHA第二过渡接头132、EHA第三单向阀133、EHA第四单向阀134均通过螺纹连接的方式安装于EHA阀块114的端口中。
EHA第二测压接头108用于测量EHA双向高压柱塞泵左侧油口压力;EHA第三测压接头107用于测量EHA双向高压柱塞泵右侧油口压力;EHA第一测压接头102、EHA第一压力传感器115都是用于测量EHA第四单向阀134出油口这条连通油路的压力;EHA第二测压接头105、EHA第二压力传感器126都是用于测量EHA第三单向阀133出油口这条连通油路的压力;测压接头通过测压管与压力表连接,压力表直观显示油压;压力传感器读取油液压力信号,并通过信号线与计算机进行数据交互,做进一步处理。
EHA阀块114内部沿从EHA油箱111到EHA伺服电机101方向依次分为第一流通截面、第二流通截面、第三流通截面的三个流通截面;
1、第一流通截面:
如图7所示,第一流通截面上的EHA阀块114内部在两侧均设有一个竖直的第一截面主油道,两侧的第一截面主油道的底部之间通过第一水平辅助油道连通,而形成U形流道;两侧的第一截面主油道均经各自在EHA阀块114内部开设的第一过渡水平流道分别和EHA阀块114水平孔两侧的中油箱流道连接相通,两侧的第一截面主油道的过渡水平流道中从中油箱流道到第一截面主油道方向依次装有单向阀129、130和过滤器128、131,具体地,EHA第一压力传感器115所在的左侧第一截面主油道的过渡水平流道中从中油箱流道到第一截面主油道方向依次装EHA第二单向阀130和EHA第二过滤器131,EHA第二压力传感器126所在的右侧第一截面主油道的过渡水平流道中从中油箱流道到第一截面主油道方向依次装EHA第一单向阀129和EHA第一过滤器128;
第一流通截面顶部的EHA阀块114表面开设两个溢流安装口,两个溢流安装口分别安装EHA第一溢流阀104和EHA第二溢流阀106,两个溢流安装口分别连通两侧的第一截面主油道;同时两个溢流安装口分别和EHA阀块114水平孔两侧的上油箱流道连接相通,EHA第一溢流阀104和EHA第二溢流阀106的两端分别连接到各自溢流安装口所连接的第一截面主油道和上油箱流道;
第一流通截面左右两侧的EHA阀块114表面分别开设第一压力安装口和第二压力安装口,第二压力安装口下方的EHA阀块114表面开设第三液控单向安装口,第一压力安装口、第二压力安装口、第三液控单向安装口分别安装EHA第一压力传感器115、EHA第二压力传感器126、EHA第三液控单向阀127,第一压力安装口、第二压力安装口、第三液控单向安装口均经各自最近的内部流道流通方式连通到各自一侧的第一截面主油道;
EHA第三液控单向阀127插装到第三液控单向安装口后,EHA第三液控单向阀127的进油端经自身所在一侧的下油箱流道和EHA油箱111内连通,EHA第三液控单向阀127的液控端和自身所在一侧的第一截面主油道连通,EHA第三液控单向阀127的出油端经EHA阀块114内部开设的第一水平辅助油道连通和EHA第一压力传感器115所在一侧的第一截面主油道连通;
2、第二流通截面:
如图8所示,第二流通截面上的EHA阀块114内部在两侧均设有一个竖直的第二截面主油道,两侧的第二截面主油道的底部之间通过第二下水平辅助油道连通,而形成环形流道;两侧的第二截面主油道均经各自在EHA阀块114内部开设的第二过渡水平流道分别和EHA阀块114水平孔两侧的中油箱流道连接相通,两侧的第二截面主油道的过渡水平流道中装有单向阀,具体地,EHA第二液控单向阀118所在的左侧第二截面主油道的过渡水平流道中装EHA第四单向阀134,另一侧第二截面主油道的过渡水平流道中装EHA第三单向阀133;
第二流通截面顶部的EHA阀块114表面开设第二过渡接口,第二过渡接口安装EHA第二过渡接头132,第二流通截面在左右两侧中一侧的EHA阀块114表面从下到上分别开设第一液控单向安装口和第二液控单向安装口,第一液控单向安装口和第二液控单向安装口均与EHA第一压力传感器115位于EHA阀块114同一侧,第一液控单向安装口和第二液控单向安装口中分别安装EHA第一液控单向阀116和EHA第二液控单向阀118;第二液控单向安装口将EHA第二液控单向阀118自身一侧所在的第二截面主油道和第二过渡接口连通,同时EHA第二液控单向阀118自身一侧的另一侧的第二截面主油道经EHA阀块114内部的流道和第二液控单向安装口连通;
EHA第二液控单向阀118的进油端连接到自身所在一侧的另一侧的第二截面主油道,EHA第二液控单向阀118的出油端连接到第二过渡接口,EHA第二液控单向阀118控制端连通到自身所在一侧的第二截面主油道;
EHA第一液控单向阀116插装到第一液控单向安装口后,EHA第一液控单向阀116的进油端经自身所在一侧的下油箱流道和EHA油箱111内连通,EHA第一液控单向阀116的出油端经水平流道和自身所在一侧的另一侧的第二截面主油道连通,EHA第一液控单向阀116的液控端和自身所在一侧的第二截面主油道连通;
3、第三流通截面:
如图9所示,第三流通截面上的EHA阀块114内部在两侧均设有一个竖直的第三截面主油道;第三流通截面顶部的EHA阀块114表面开设第一过渡接口、第一测压接口和第二测压接口,第一过渡接口、第一测压接口和第二测压接口安装EHA第一过渡接头103、EHA第一测压接头102和EHA第二测压接头105;
第三流通截面在左右两侧中一侧的EHA阀块114表面开设平衡安装口,平衡安装口与EHA第二压力传感器126位于EHA阀块114同一侧,平衡安装口中安装EHA平衡阀125;平衡安装口将EHA平衡阀125自身一侧所在的第三截面主油道和第一过渡接口连通,同时EHA平衡阀125自身一侧的另一侧的第三截面主油道经EHA阀块114内部的流道和平衡安装口连通;EHA平衡阀125的两个油口端分别连通到第一过渡接口和自身所在一侧的另一侧的第三截面主油道,EHA平衡阀125控制端连通到自身所在一侧的第三截面主油道;
三个流通截面在EHA阀块114中心孔两侧的截面主油道通过在两侧各自的水平通道连通,即在EHA阀块114中心孔同一侧的第一流通截面的第一截面主油道、第二流通截面的第二截面主油道、第三流通截面的第三截面主油道通过一个水平通道连通。
在EHA阀块114上开设有加工油道后的各个端口,端口中均安装EHA阀块螺堵组117,EHA阀块螺堵组117用于封堵、维护油道。
EHA油箱111上设有多个用于流通的、用于注/排油、吸/排气、油液观察的油口,EHA空气过滤塞109、EHA第一油镜110、EHA第一油箱螺堵112、EHA第二油箱螺堵113、EHA第二油镜124通过螺纹连接安装于EHA油箱111的油口。空气过滤塞能双向通气,同时在空气进入油箱时,起到过滤空气的作用,以免杂质进入油液。
具体地,EHA油箱111顶面设有用于吸/排气或注油的油口并安装EHA空气过滤塞109,EHA油箱111左右两侧均设有用于液位及油液清洁程度观察的油口并分别安装EHA第一油镜110和EHA第二油镜124,EHA油箱111的外侧面均设有用于排油的油口并分别安装EHA第一油箱螺堵112和EHA第二油箱螺堵113。
上述EHA阀块114内部油道和端口开设安装结构形成了如图11所示的液压原理结构,EHA第一测压接头102、EHA第一过渡接头103、EHA第一溢流阀104、EHA第二测压接头105、EHA第二溢流阀106、EHA第三测压接头107、EHA第四测压接头108、EHA第一压力传感器115、EHA第一液控单向阀116、EHA阀块螺堵组117、EHA第二液控单向阀118、EHA平衡阀125、EHA第二压力传感器126、EHA第三液控单向阀127、EHA第一过滤器128、EHA第一单向阀129、EHA第二单向阀130、EHA第二过滤器131、EHA第二过渡接头132、EHA第三单向阀133、EHA第四单向阀134均通过螺纹连接的方式安装于EHA阀块114。
EHA伺服电机101的输出轴和EHA双向高压柱塞泵120的输入轴连接,EHA双向高压柱塞泵120的一个油口分别依次经EHA第一单向阀129、EHA第一过滤器128后再经EHA第二液控单向阀118和液压缸200的液压锁阀板第一口2033连接,EHA双向高压柱塞泵120的另一个油口分别依次经EHA第二单向阀130、EHA第二过滤器131后再经EHA平衡阀125和液压缸200的液压锁阀板第二口2032连接;EHA第一单向阀129、EHA第一过滤器128串联的两端之间并联有EHA第三单向阀133,EHA第三单向阀133由EHA双向高压柱塞泵120向EHA第二液控单向阀118单向导通;EHA第二单向阀130、EHA第二过滤器131串联的两端之间并联有EHA第四单向阀134,EHA第四单向阀134由EHA双向高压柱塞泵120向EHA平衡阀125单向导通;EHA第一过滤器128和EHA第二液控单向阀118之间引出管路分别经EHA第二溢流阀106和EHA第一液控单向阀116连接到油箱,EHA第二过滤器131和EHA平衡阀125之间引出管路分别经EHA第一溢流阀104和EHA第三液控单向阀127连接到油箱;EHA第三液控单向阀127和EHA平衡阀125的控制端均连接到EHA第一过滤器128和EHA第二液控单向阀118之间的管路,EHA第一液控单向阀116和EHA第二液控单向阀118的控制端均连接到EHA第二过滤器131和EHA平衡阀125之间的管路。
如图15所示,液压缸200安装在全断面掘进机刀盘303的换刀机械臂301上,用于完成伸缩控制动作,如图12-图14所示,液压缸200包括缸筒第一组件205、缸筒第二组件207、缸筒第三组件208和缸筒第四组件210;活塞杆201可轴向伸出/缩回活动地安装于液压缸200前端的缸筒内,活塞杆201和液压缸200前端口之间通过液压缸前导向套214导向和密封,活塞杆201后端开设有轴向空腔;液压锁安装板204焊接于缸筒第一组件205外壁,液压锁阀板203通过螺栓固定安装于液压锁安装板204,液压锁202安装在液压锁阀板203上;液压锁阀板第一口2031与油缸B口216通过硬油管连接,液压锁阀板第四口2034与油缸A口215通过硬油管连接;传感器感应杆第二组件209与缸筒第三组件208后端通过螺纹固定连接,传感器感应杆第一组件206前端安装在活塞杆201轴向空腔内,传感器感应杆第一组件206后端伸出活塞杆201轴向空腔后与传感器感应杆第二组件209通过螺纹固定连接;
传感器电子头211通过螺栓与缸筒第四组件210固定连接,传感器电子头211与传感器感应杆第二组件209通过通讯线缆连接,通讯线缆穿设布置于缸筒第四组件210内部;活塞杆201轴向空腔的后端在传感器感应杆第一组件206外围开设有环形凹槽,传感器位置磁铁212与传感器非导磁隔离垫片213通过过盈连接安装于活塞杆201的环形凹槽内,其中传感器位置磁铁212位于中间,两边各有一片传感器非导磁隔离垫片213。
电液作动器100从EHA第一过渡接头103、EHA第二过渡接头132分别引出一根液压软管连接至机械臂安装空间进油口302,机械臂安装空间进油口302再经由机械臂安装空间内部管路分别与液压锁阀板203上的液压锁阀板第二口2032、液压锁阀板第三口2033连接。
传感器说明:传感器感应杆第二组件209的作用主要是安装传感器感应杆第一组件206,并与外部结构进行螺纹连接,起到装配连接及信号传送作用;传感器位置磁铁212安装于活塞杆201,传感器位置磁铁212产生的磁场与传感器感应杆第二组件209产生的磁场相交,当位置磁铁跟随活塞杆运动时,传感器位置磁铁212产生的磁场会跟随移动,磁场的变化会在传感器感应杆第一组件206中产生电信号,并通过传感器感应杆第二组件209尾端的信号线传送至传感器电子头211,传感器电子头211上有通讯端口,通过信号线与计算机进行数据交互。
由此,传感器位置磁铁212跟随活塞杆201运动,产生磁场变化并被传感器感应杆第一组件206检测,产生电信号,再通过传感器感应杆第二组件209尾端的信号线传送至传感器电子头211。
这样液压缸200内置磁致伸缩位移传感器,精确反馈活塞杆201实际位移。并且,液压缸200安装有液压锁202,在液压管路拆除维护、伺服电机运动停止时保持活塞杆201位置。传感器感应杆第一组件206、传感器感应杆第二组件209、传感器位置磁铁212、传感器电子头211都是磁致伸缩位移传感器的组成部件,传感器感应杆第一组件206、传感器感应杆第二组件209、传感器位置磁铁212内置于液压缸,而传感器电子头211安装于外部,电子头上有通讯端口,与计算机连接。
本发明的电液作动器100与液压缸200分体式安装,通过液压软管连接,液压缸安装于机械臂,处于高压高湿的机械臂安装空间内,电液作动器安装于机械臂安装空间外的常压常湿环境。机械臂换刀作业时安装空间内会加压,并跟盾构机外部连通,所以高压高湿;机械臂未工作时,安装空间内不会加压,且不跟盾构机外部连通,常压常湿。
一方面,由于机械臂安装空间十分有限,安装空间内仅安装液压缸,进一步节省空间。另一方面具有很好的维护性,当机械臂换刀作业时,安装空间内是高压高湿环境,舱门无法开启,维修人员无法进入,如遇突发故障,维护人员可在外部常压常湿环境下维修电液作动器,而液压缸极少出现完全失效,至少保证能将机械臂收回安装空间内,否则影响盾构机正常施工,甚至引发安全事故。
本发明的电液作动器100适用于执行器受单向负载,尤其是受负负载(负载力方向与运动方向一致)作用的工况;EHA第一液控单向阀116、EHA第三液控单向阀127起补油、排油作用。
电液作动器单元包括电液作动器100、液压缸200,其安装维护方式如下:
液压缸200安装于换刀机械臂301上,其中机械臂安装空间内为压力大于2MPa,湿度高于90%的高压高湿恶劣环境;电液作动器100外置于机械臂安装空间,环境为常压常湿,电液作动器单元本身具有耐高压耐高湿能力,安装于常压常湿环境主要是为了维护人员能进入,便于维护;液压缸200与电液作动器100通过液压软管连接;由于电液作动器100置于常压常湿的环境,如果机械臂换刀作业时电液作动器单元遇故障损坏需要更换,维护人员可视实际工况替换安装于EHA阀块上114的插装阀,或者拆除电液作动器100上与液压缸200连接的液压软管,更换整个EHA,此时安装于液压缸200上的液压锁202锁止活塞杆201运动,防止维修更换动力单元时活塞杆201在负载作用下运动,以免造成意外。
电液作动器100适用于执行器受单向负载,尤其是受负负载(负载力方向与运动方向一致)作用的工况,如说明书附图11所示。
以液压缸200活塞杆201缩回,并受压力F作用的负负载工况为例:EHA伺服电机101带动EHA双向高压柱塞泵120转动,右侧出油,油液先经过EHA第三单向阀133,并通过控制口打开EHA第三液控单向阀127,此时液压锁202打开,液压油再经由EHA第二液控单向阀118输出到液压缸200的有杆腔,EHA平衡阀125在液压缸200无杆腔和控制油口压力的共同作用下打开,油液经由EHA第二过滤器131和EHA第二单向阀130回到EHA双向高压柱塞泵120左侧,由于液压缸200无杆腔一侧回油体积多于有杆腔一侧所需油液的体积,EHA双向高压柱塞泵120经EHA第三液控单向阀127往EHA油箱111排油;
液压缸200活塞杆201伸出,并受压力F作用的正负载工况时,EHA双向高压柱塞泵120左侧出油,此时液压缸200有杆腔一侧回油体积少于无杆腔一侧所需油液的体积,EHA双向高压柱塞泵120经EHA第一液控单向阀116从EHA油箱111吸油;
EHA第一液控单向阀116、EHA第三液控单向阀127作补油、排油作用,EHA第一溢流阀104、EHA第二溢流阀106作安全阀,限制系统最高压力,EHA平衡阀125在液压缸200受负负载作用时,产生背压,防止活塞杆失速,并且起到不工作时对油路锁止的作用,保持活塞杆位置。EHA第二液控单向阀118起到系统不工作时对油路锁止的作用,保持活塞杆位置。
液压缸200的活塞杆201运动时带动组装于其上的传感器位置磁铁212运动,传感器感应杆检测传感器位置磁铁212的位移,并将数据传送至传感器电子头211,再通过与传感器电子头211连接的通讯线缆,将信号传至上位机接收并处理,做位移闭环控制。
- 用于盾构机单滚刀更换的单向负载机械臂电液作动器单元
- 用于盾构机单滚刀更换的双向负载机械臂电液作动器单元