用于锚定和限制胃肠道假体的系统和方法
文献发布时间:2023-06-19 10:00:31
本申请要求2018年3月30日提交的美国临时专利申请第62/650,923号的权益,所述申请以全文引用的方式并入本文中。
技术领域
本公开大体上涉及放置在胃肠道(包括胃和小肠)内的植入物。更具体地,本公开涉及用于植入和取出具有使用内窥镜技术可植入和可移除的部件的系统的装置和方法,用于治疗肥胖、糖尿病、非酒精性脂肪肝病(NAFLD)、胃轻瘫和其它胃肠道病况。
背景技术
肥胖症治疗手术程序,如袖状胃切除术、Roux-en-Y胃旁路(RYGB)和胆胰转移术(BPD),改变在胃肠道系统内的食物摄入和/或吸收,以实现肥胖患者减轻体重。这些程序通过短路某些自然途径或在食用食物、消化道、其分泌物和调节食物摄入和代谢的神经激素系统之间建立不同的相互作用,来影响胃肠道系统的代谢过程。在过去的几年中,越来越多的临床共识认为,进行肥胖症治疗手术的肥胖患者在程序后不久即可看到其2型糖尿病(T2DM)的显著的好转。在RYGB和BPD之后糖尿病的显著的好转通常发生得太快,无法仅通过体重减轻来解释,这表明可能对葡萄糖稳态产生直接影响。T2DM此好转机制尚未得到很好的理解,并且很可能涉及多种机制。
肥胖症治疗手术程序的缺点中的一个在于它们需要相当侵入性手术,具有潜在严重的并发症和长患者恢复期。近年来,人们加大了开发微创手术以模仿肥胖症治疗手术效果的努力。许多这类程序涉及在胃或小肠内使用胃肠道植入物,其改变食物和器官分泌物的运输和吸收。这类程序的主要挑战中的一个包括由于在胃肠道内的间歇和复杂的蠕动而难以将植入物安全地锚定在胃肠道的动态环境中。已经尝试用如缝合线、钉和倒钩的装置将植入物紧固在胃肠道内。举例来说,美国专利第7,476,256号描述了具有带有锚定倒钩的管状套管的植入物,所述锚定倒钩穿透小肠的壁。然而,具有主动固定装置的支架,如在美国专利第7,476,256号中描述的穿透胃或小肠的壁进入周围组织的倒钩,可潜在地引起组织坏死和植入物通过组织的糜烂。这些系统还与穿透胃或小肠壁为细菌建立从胃肠道内部的非无菌环境迁移到腹腔中的各个器官的无菌环境的途径相关。这增加了周围器官如肝脏和胰腺的感染风险,并且可能带来非常严重的健康风险,并且需要包括手术的积极治疗。
发明内容
根据一个实例(“实例1”),胃肠道植入物系统包括被配置成植入患者的幽门内的植入物,所述植入物具有近侧部分、远侧部分和位于近侧和远侧部分之间的颈部部分,所述颈部部分被配置成当植入时跨越幽门的幽门括约肌,抗移动锚定,其包括细长元件、联接到细长元件的第一保持特征和联接到细长元件的第二保持特征,所述抗移动锚定被配置成使得细长元件能够被操作以跨越植入物的颈部部分,使得第一保持特征可定位在植入物的近侧部分的近侧,并且使得第二保持特征可定位在植入物的远侧部分的远侧。
根据关于实例1的另一个实例(“实例2”),第一和第二保持特征被配置成在递送和展开配置之间转换。
根据关于实例2的另一个实例(“实例3”),在递送配置中,第一和第二保持特征沿细长元件延伸,并且其中在展开配置中,第一和第二保持特征横向于细长元件延伸。
根据关于实例2或3中的任一个的另一个实例(“实例4”),第一保持特征包括第一末端、第二末端,和位于第一和第二末端之间的中间部分,并且其中细长元件联接到中间部分。
根据关于实例2到4中的任一个的另一个实例(“实例5”),当不受限制时,偏置第一和第二保持特征中的一个或多个以转换到递送配置。
根据关于前述实例中的任一个的另一个实例(实例6),抗移动锚定被配置成延伸通过位于植入物的近侧和远侧部分之间的组织,由此将植入物紧固到组织。
根据关于实例6的另一个实例(“实例7”),植入物的近侧和远侧部分以及颈部形成用于将植入物锚定到组织的主要锚定,并且其中抗移动锚定形成用于将植入物锚定到组织的第二锚定。
根据关于前述实例中任一个另一个实例(“实例8”),操作抗移动锚定以帮助维持植入物的几何形状。
根据关于实例8的另一个实例(“实例9”),其中操作抗移动锚定以通过限制在植入物的近侧和远侧部分之间的长度最小化在植入物的近侧和远侧部分之间的相对回转量。
根据关于实例8或9中的任一个的另一个实例(“实例10”),抗移动锚定限制植入物的近侧和远侧部分中的一个或多个的变形量。
根据关于前述实例中任一个的另一个实例(“实例11”),抗移动锚定的第一和第二保持特征被配置成使得它们仅可接触植入物的近侧和远侧部分,并且不能与幽门组织直接接触。
根据关于中前述实例中任一个的另一个实例(“实例12”),操作抗移动锚定以当植入时将植入物系栓到幽门。
根据关于中前述实例中任一个的另一个实例(“实例13”),操作抗移动锚定以当植入时将植入物牢固地附连到幽门。
根据前述实例中任一个的另一个实例(“实例14”),在植入植入物之后,可植入抗移动锚定。
根据关于前述实例中任一个另一个实例(“实例15”),抗移动锚定从植入物可移除。
根据另一个实例(“实例16”),用于保持在患者的幽门处的植入的胃肠道植入物的抗移动设备包括细长元件、多个保持突片,其包括联接到细长元件的第一保持特征和联接到细长元件的第二保持特征,所述第一保持特征能够被操作以在递送配置和展开配置之间转换,所述细长元件被配置成在胃肠道装置的近侧部分之间跨越,使得第一保持特征可定位在胃肠道装置的近侧部分的近侧,并且使得第二保持特征可定位在胃肠道装置的远侧部分的远侧。
根据另一个实例(“实例17”),一种将胃肠道植入物紧固在患者的幽门内的方法,其包括提供植入物,所述植入物具有近侧部分、远侧部分,和位于近侧和远侧部分之间的颈部部分,在幽门内展开植入物,使得颈部部分跨越幽门,其中植入物的近侧部分位于幽门的近侧,并且远侧部分位于幽门的远侧,提供抗移动锚定,所述抗移动锚定包括细长元件、联接到细长元件的第一保持特征,和联接到细长元件的第二保持特征,在展开植入物之后,展开抗移动锚定,使得抗移动锚定跨越植入物的颈部部分并且穿刺植入物的近侧和远侧部分,并且使得第一保持特征位于植入物的近侧部分的近侧,并且使得第二保持特征位于植入物的远侧部分的远侧。
根据关于实例17的另一个实例(“实例18”),方法另外包括将植入物在幽门内展开,使得幽门的组织位于颈部部分附近并且在植入物的近侧和远侧部分之间。
根据关于实例17到18中的任一个另一个实例(“实例19”),方法另外包括展开抗移动锚定,使得抗移动锚定穿刺幽门的组织但是不穿透胃或小肠的壁进入周围腹腔。
根据关于实例17到19中的任一个的另一个实例(“实例20”),方法另外包括展开多个抗移动锚定。
根据关于实例17到20中的任一个的另一个实例(“实例21”),方法另外包括展开多个抗移动锚定,使得每个抗移动锚定穿刺组织。
根据另一个实例(“实例22”),在递送配置和展开配置之间可转换的抗移动锚定递送系统,其包括第一导管、联接到第一导管的定位器系统,所述定位器系统包括定位器胶囊和被配置成从定位器胶囊径向向外延伸的第一可延伸臂,使得在递送配置中,第一可延伸臂在定位器胶囊内收起,并且使得在展开配置中,第一可延伸臂从定位器胶囊径向向外突出,联接到第一可延伸臂的第二导管,所述第二导管被配置成抗移动锚定递送到在患者的解剖结构内展开的植入物,其中在递送配置中,第二导管位于相对于定位器胶囊的第一径向位置,并且其中在展开配置中,第二导管位于相对于定位器胶囊的第二径向位置。
根据关于实例22的另一个实例(“实例23”),定位器胶囊位于第一导管的远侧末端。
根据关于实例22到23中的任一个的另一个实例(“实例24”),第二径向位置为比第一径向位置更径向远离定位器胶囊的纵向轴线的径向位置。
根据关于实例22到24中的任一个的另一个实例(“实例25”),定位器系统另外包含在第一可延伸臂的远侧的第二可延伸臂,所述第二可延伸臂被配置成从定位器胶囊径向向外延伸,使得在递送配置中,第二可延伸臂在定位器胶囊内收起,并且使得在展开配置中,第二可延伸臂从定位器胶囊径向向外突出。
根据关于实例25的另一个实例(“实例26”),在递送配置中,第一和第二可延伸臂位于彼此的第一纵向距离,并且使得在展开配置中,第一和第二可延伸臂位于彼此的第二纵向距离。
根据关于实例26的另一个实例(“实例27”),第二纵向距离比第一纵向距离短。
根据另一个实例(“实例28”),抗移动锚定递送系统包括第一导管、联接到第一导管的远侧末端的定位器系统,所述定位器系统包括定位器胶囊和从第一导管定位器胶囊径向向外延伸的罩,所述罩定位在定位器胶囊的近侧,被配置成将抗移动锚定递送到在患者的解剖结构内展开的植入物的第二导管,其中第二导管被配置成推进通过内窥镜和定位器系统的罩,使得罩将第二导管限制在相对于定位器胶囊的纵向轴线的指定径向位置。
尽管公开多个实施例,但是对于所属领域技术人员来说,从示出和描述说明性的实施例的以下详述理解再其它的实施例将变得显而易见。因此,附图和具体实施方式本质上应被视为说明性的,而非限制性的。
附图说明
包括附图是为了提供对本公开的进一步理解,并且附图并入本说明书中并且构成本说明书的一部分,附图说明实施例,并且与描述内容一起用于阐释本公开的原理。
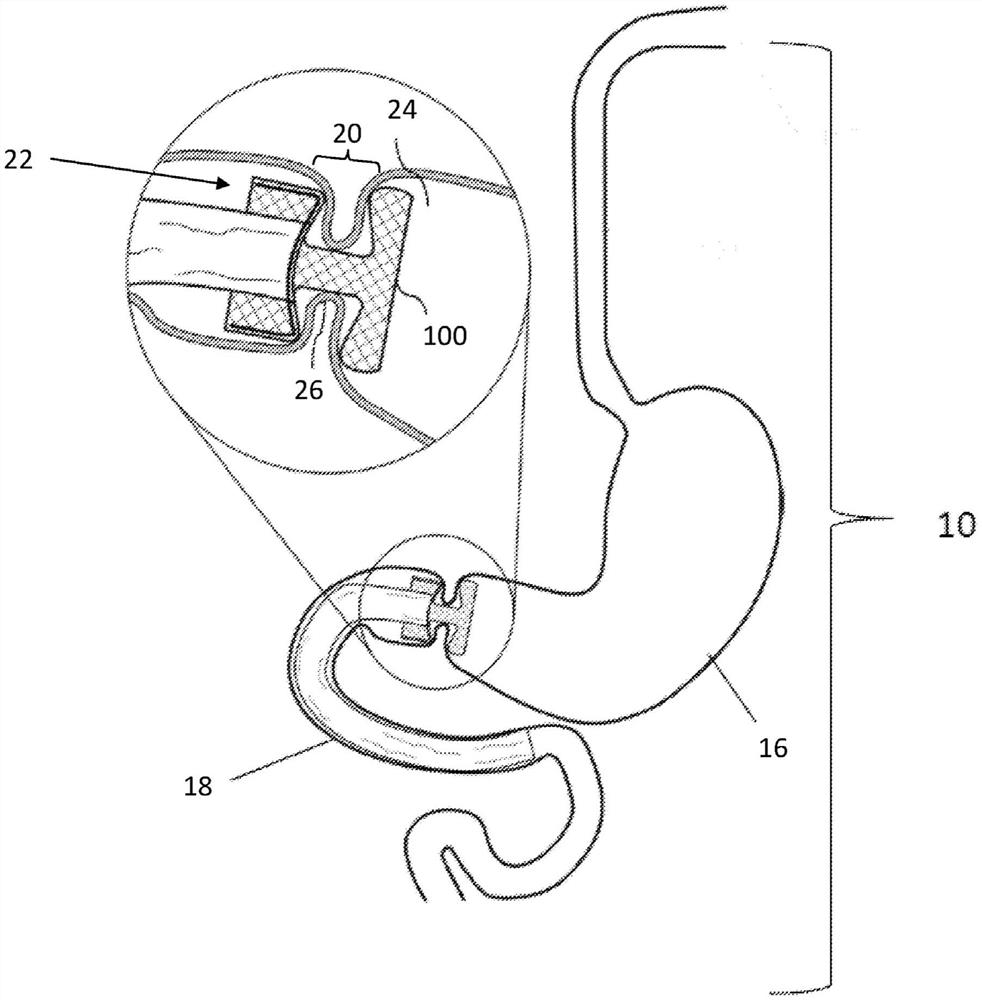
图1为根据一些实施例其中胃肠道装置定位在幽门中的人体内消化道的一部分的横截面视图;
图2为根据一些实施例胃肠道装置的示意图;
图3为根据一些实施例在其中胃肠道装置植入幽门中的人体内的消化道的一部分的横截面视图;
图4A为根据一些实施例缝合线系绳的前透视图;
图4B为根据一些实施例缝合线系绳的前透视图;
图5为根据一些实施例其中胃肠道装置和缝合线系绳植入幽门的人体内的消化道的一部分的横截面视图;
图6为根据一些实施例的递送系统的前透视图;
图7为根据一些实施例的图6的递送系统的放大图;
图8为根据一些实施例的沿线8-8截取的图6的递送系统的一部分的截面视图;
图9为根据一些实施例的图6的递送系统的放大图;
图10为根据一些实施例的图9的圆圈10的放大图;
图11为根据一些实施例的图6的递送系统的放大图;
图12为根据一些实施例的图6的递送系统的放大图;
图13为根据一些实施例的图12的圆圈13的放大图;
图14为根据一些实施例的图6的递送系统的放大图;
图15为根据一些实施例的图6的递送系统的放大图;
图16为根据一些实施例的图15的圆圈16的放大图;
图17为根据一些实施例其中胃肠道装置跨幽门定位的人体内消化道的一部分的横截面视图;
图18为根据一些实施例其中胃肠道装置跨幽门定位的人体内消化道的一部分的横截面视图;
图19为根据一些实施例其中胃肠道装置跨幽门定位的人体内消化道的一部分的横截面视图;和
图20A根据一些实施例说明胃肠道植入物递送系统
图20B为根据一些实施例沿其纵向轴线截取的胃肠道植入物递送系统的截面视图
图21A-21E根据一些实施例说明胃肠道植入物递送系统
图22根据一些实施例说明胃肠道植入物递送系统
图23A-23B根据一些实施例说明与胃肠道装置组合的胃肠道植入物递送系统
图24A-24B为根据一些实施例其中胃肠道植入物递送系统与胃肠道装置组合的人体内的消化道的一部分的横截面视图
图25为根据一些实施例其中胃肠道装置根据一些实施例跨幽门定位的人体内消化道的一部分的横截面视图。
具体实施方式
所属领域的技术人员将容易了解,可通过任何数量的被配置成执行预期功能的方法和设备实现本公开的各个方面。还应该注意,本文中所参考的附图图式未必按比例绘制,而是可被放大以说明本公开的各个方面,并且为此附图图式不应被理解为是限制性的。
本公开涉及在患者的解剖结构内放置和移除设备和系统的设备、系统和方法。使用本文公开的设备、系统和方法,可植入装置可放置(例如递送和/或展开)在患者的解剖结构内和/或从其取出。在各种实施例中,这类程序在内窥镜下通过嘴、喉、胃和肠进行。一些实例涉及用于将可植入医疗装置放置在患者的胃肠道内(如在患者的幽门窦、幽门、十二指肠和/或空肠内)和/或从其取出的设备、系统和方法。应了解,在各种实例中,这类医疗装置可经由一种或多种导管递送。
在一些情况下,本文公开的设备、系统和方法可用于将医疗装置(如胃肠道装置)的位置紧固在患者的解剖结构内。举例来说,在一些实例中,一种或多种锚定元件可用以将胃肠道装置紧固在患者的胃和/或肠内的特定部分,包括幽门窦、幽门、十二指肠和/或空肠。在各种实施例中,可移除这些设备和系统。举例来说,可在指定的时间段之后或响应于一个或多个事件的发生而移除(一个或多个)锚定元件和胃肠道装置。
如下文更详细地论述,在各种实施例中,操作锚定构件(如一个或多个锚定元件)以将胃肠道植入物系栓到胃底部的幽门。幽门为肌肉体,通过随着环形肌肉的松弛和收缩而打开和关闭而作为括约肌起作用,由此在胃的底部包括圆形的孔隙,所述孔隙充当瓣膜。当完全打开时,幽门的最大直径大体上呈现在十二毫米(12mm)和三十毫米(30mm)之间。
因此,所公开的系统、装置和方法不从消化道内穿透到腹腔中,由此使细菌迁移和随后感染的风险最小化。在各种实例中,递送系统能够被操作以将缝合线系绳递送通过容纳在胃肠道的非无菌环境内的幽门的肌肉部分。在一些实例中,递送系统另外包括一个或多个特征和/或属性,其被操作以最小化穿透周围腹腔的无菌环境的风险。在一些实例中,递送系统另外包括一个或多个特征,其操作以最小化或以其它方式保护幽门免受可引起撕裂、压力坏死或溃疡的过度的力。
图1示出人消化道10的一部分的横截面视图,其示出胃16、肠18、幽门20和十二指肠22。幽门大体上包括幽门窦24和幽门括约肌26。如图1所示,胃肠道装置100定位在胃16和肠18之间。在一些实例中,胃肠道装置100定位在幽门20内,使得胃肠道装置100的一个或多个部分定位在幽门窦24内或与其邻近。在一些实例中,胃肠道装置100另外地或替代地定位,其中胃肠道装置100的一个或多个部分定位在十二指肠22内。
图2和3示出根据各种实施例的胃肠道装置100。图2为胃肠道装置100的透视图。图3为在患者的解剖结构中胃肠道装置100的简化形式的截面视图,为了清晰起见,说明移除近侧和远侧结构元件172和196。
在各种实施例中,胃肠道装置100可扩张,可在内窥镜下递送的部件,其与在胃肠道内的自然解剖结构对接以帮助实现体重减轻。在一些实例中,胃肠道装置100可扩张,如所属领域的技术人员将了解。即,在各种实施例中,在展开时,胃肠道装置100可从压缩或折叠递送配置转换到扩张展开配置。尽管在图2或3中未示出,应了解,在各种实例中,套管可附接或可能够附接到胃肠道装置100,在展开时,套管120可定位或能够定位在患者的肠18内,如所属领域的技术人员将了解。因此,在各种实例中,旁路套管可为肠道旁路套管、肠道衬管或旁路衬管。
继续参考图2和3,胃肠道装置100具有大体圆柱形形状。在一些实施例中,胃肠道装置100限定沿胃肠道装置100的长度的中心纵向轴线。胃肠道装置100大体上还包括近侧部分130、远侧部分132和颈部部分134。在各种实例中,颈部部分134位于近侧部分130和远侧部分132之间。颈部部分134可与近侧和远侧部分130和132成一体,或可替代地联接到近侧和远侧部分130和132。在各种实例中,颈部部分134流体地联接近侧和远侧部分130和132。在一些实例中,颈部部分134为管状并且包括通过其的内腔。在一些此类实例中,腔沿胃肠道装置100的纵向轴线延伸。
在一些实例中,近侧部分130包括近侧末端140和远侧末端142。在一些实例中,近侧部分130为圆柱形或管状形。在一些实施例中,近侧壁凸缘148位于近侧部分130和颈部部分134之间。在一些实例中,近侧部分130的外表面的直径大于颈部部分134的外表面的直径。因此,在各种实例中,近侧壁凸缘148大体上为盘形并且在颈部部分134和近侧部分130之间延伸,如图所示。在一些实例中,近侧壁凸缘148横向于胃肠道装置100的中心纵向轴线定向。
在各种实施例中,近侧部分130和近侧壁凸缘148中的一个或多个采用弯曲轮廓或另外倾向于当展开(例如当胃肠道装置100扩张时)时具有弯曲轮廓。举例来说,在一些实例中,近侧部分130和近侧壁凸缘148中的一个或多个包括凹面。举例来说,近侧壁凸缘148可类似于钵。在一些其它实例中,近侧部分130和近侧壁凸缘148中的一个或多个另外地或替代地包括凸面。
在一些实施例中,远侧部分132包括近侧末端144、远侧末端146和在近侧和远侧末端144和146中间延伸的外壁。在一些实例中,远侧部分132成形为凸缘。在一些实例中,远侧部分132为圆柱形。在一些实例中,远侧壁凸缘150位于远侧部分132和颈部部分134之间。在一些实例中,远侧部分132的外表面的直径大于颈部部分134的外表面的直径。因此,在各种实例中,远侧壁凸缘150大体上为盘形并且在颈部部分134和远侧部分132之间延伸,如图所示。远侧壁凸缘150大体上从远侧部分132的近侧末端144延伸。在一些实例中,远侧壁凸缘150横向于胃肠道装置100的中心纵向轴线延伸。如下文更详细地讨论,当定位在患者内时,在扩张配置中,远侧部分132可定位在十二指肠中,和/或可限定在面向肠18的远侧末端146的开口。
颈部部分134包含第一末端160、第二末端162和在第一和第二末端160、162之间延伸的壁。颈部部分134可成形为在近侧部分130和远侧部分132之间延伸的筒,如上文所提到。在一些实例中,颈部部分134限定通腔152,其允许胃16的内容物(例如鸣响)传递到肠18中。颈部部分134可为刚性的,以保持幽门20打开,或它可为顺应性的,以允许通腔152与幽门20一起开口和闭合。
在一些实施例中,颈部部分134的长度可为约患者的幽门的宽度。在一些实施例中,颈部部分134的长度可比患者的幽门的宽度长,以提供在近侧壁凸缘148、远侧壁凸缘150和幽门20之间的间隙。在一些实施例中,颈部部分134的大小可被设定成允许近侧壁凸缘148和远侧壁凸缘150接触幽门20。
在各种实施例中,胃肠道装置100可由编织线结构形成,所属领域的技术人员所属领域的技术人员将了解。这类编织线结构可帮助将胃肠道装置100定位在患者内。举例来说,编织线结构可为胃肠道装置100提供结构支撑并且帮助维持胃肠道装置100的形状。
在一些实施例中,胃肠道装置100包括容纳在编织线结构内的结构元件。如图2所示,在一些实施例中,胃肠道装置100具有远侧结构元件196。在一些实例中,远侧结构元件196包含附接到远侧部分132和/或颈部部分134的环193、194。在一些实例中,远侧结构元件196包括金属,如镍钛诺(镍-钛合金)、镍-钴底部合金,如以商标名
如图2所示,远侧结构元件196的环193、194周围远侧部分132布置并且如通过一体地织造到凸缘材料中附接到远侧部分132。远侧结构元件196的环193、194通过织造环193、194穿过远侧部分132的编织的结构来附接。在一些实例中,线末端可插入到连接套管中,并且通过任何其它合适的已知手段压接、焊接和/或扣紧。
如图2所示,在一些实施例中,胃肠道装置100另外地或替代地包括附接到近侧部分130的近侧结构元件172。在一些实例中,近侧结构元件172为压缩偏置元件,如弹簧。近侧结构元件172可构建为具有节点186的大体上圆形框架。近侧结构元件172可由形成远侧结构元件196的相同的材料构造。近侧结构元件172还可为近侧部分130提供结构支撑。举例来说,近侧结构元件172大体上具有可压缩但仍是刚性的整体框架。近侧结构元件172可赋予近侧部分130额外的径向强度,并且帮助保持近侧部分130的近侧末端140打开。可成形近侧结构元件172以偏置胃肠道装置100的折叠方向,用于从患者移除并且用于将装置装载到递送导管上,用于在患者内递送。
如图2所示,在一些实施例中,胃肠道装置100可包括拉绳192。在一些实例中,拉绳192附接到近侧部分130。拉绳192可通过将拉绳192织造通过近侧部分130的材料附接到近侧部分130。在各种实例中,拉绳可织造通过近侧部分的材料并且具有形成环圈198的拉绳的一部分。举例来说,拉绳192可由织造通过胃肠道装置100的编织线结构中的交替的单元的绳或缝合线构造。环198允许拉绳192附接到缩回工具,例如钩或夹具。在一些实施例中,拉绳192为编织通过近侧部分130的缝合线。拉绳192可为近侧结构元件172分开的结构。拉绳192可由缝合线材料构造并且可包含细线或电缆。
现在转回到图3,当在患者的解剖结构内展开时,近侧部分130大体上位于邻近胃16的幽门20的一侧上,其中远侧部分132大体上位于邻近十二指肠22的幽门20的一侧上,并且其中颈部部分134跨越幽门括约肌26。
如图所示,胃肠道装置100展开,使得幽门括约肌26和相关联的组织夹或以其它方式位于胃肠道装置100的近侧和远侧部分130和132之间。传统上,常规设计依赖于植入装置的完整性和几何形状来抵抗植入装置相对于幽门20和周围组织的移动和/或旋转。
举例来说,一些常规装置试图通过增加突出到十二指肠中的装置部分的长度和/或直径来抵抗或最小化植入后的旋转和移动。这类配置提供装置可接触十二指肠并且防止在偏转或移位之前进一步旋转。举例来说,延伸到十二指肠中的装置的部分的长度和直径大小可被设定成防止在十二指肠内倾斜或翻倒。在一些实施例中,这类配置提供在装置相对于周围解剖结构旋转或倾斜离开时,装置将与肠道壁接触,并且因此将抵抗移动进一步旋转或倾斜。一些其它常规设计已包括主动固定装置,如深入地穿透到周围组织中的倒钩。然而,如上文提到,这类配置具有组织坏死和糜烂的风险,其可导致并发症,如粘膜组织的细菌感染或全身感染。
在一些情况下,装置已包括额外结构部件,以辅助将装置锚定到周围解剖结构,如上文所讨论的那些结构元件(例如近侧和远侧结构元件172和196)。然而,这些结构元件不穿透周围组织,并且因此依赖于装置的几何形状和其对周围组织的干扰来维持装置在解剖结构内的对准。
在各种实施例中,一个或多个缝合线系绳可与胃肠道装置100组合使用以将胃肠道装置100紧固到周围组织。如下文中更详细地解释,操作一个或多个缝合线系绳以将胃肠道装置紧固到周围解剖结构,并且,在一些情况下,操作以帮助维持胃肠道装置100的几何形状。在各种实例中,缝合线系绳中的一个或多个延伸通过胃肠道装置100的一个或多个部分并且通过周围解剖结构的一个或多个部分。一般来说,缝合线系绳由此操作为第二锚定机构,其帮助维持胃肠道装置100相对于周围解剖结构的位置。
现在转到图4A和4B,在一些实施例中,缝合线系绳200为抗移动装置,其包括具有第一末端204、与第一末端204相对的第二末端206,和在第一末端204和第二末端206之间延伸的细长中间部分208的主体202。主体202可包含一个或多个丝状构件、编织纤维,或可为线或编织线。也就是说,在一些实例中,主体202可为结构上可压缩的,而在其它实例中,主体202不能在没有显著变形(例如,叠合或褶皱)的情况下独立地支撑压缩载荷。在各种实例中,主体202对拉伸载荷具有弹性。在一些实例中,主体202为抗拉伸的。应了解,主体可由生物相容性不可吸收缝合线材料构成,如聚丙烯、PTFE、ePTFE或dPTFE、聚酯、尼龙、UHMWPE或不锈钢。在一些实例中,主体202由被配置成抵抗组织向内生长的材料形成,如聚丙烯或尼龙、dPTFE或不锈钢。
在各种实施例中,缝合线系绳200包括一个或多个保持突片。举例来说,如图4A所示,缝合线系绳200包括第一保持突片210和第二保持突片212。操作保持突片210和212以维持缝合线系绳200相对于胃肠道装置100的位置。举例来说,在一些情况下,操作保持突片210和212以最小化缝合线系绳200与胃肠道装置100断开联接的风险,如下文进一步讨论。尽管在不脱离本公开的精神或范围的情况下可设想并可以使用多种保持突片,但是在一些实例中,保持突片由一个或多个管形成。在一些实例中,如下文更详细地讨论,管被配置成使得主体202可收纳在管内并且与管联接。在一些实例中,管可被压接以促进在保持突片和主体202之间联接。保持突片可由各种生物相容的材料形成,包括但不限于金属粒子,如不锈钢和镍钛诺,和聚合物如聚四氟乙烯(PTFE)、膨体聚四氟乙烯(ePTFE)、聚醚醚酮(PEEK)、超高分子量聚乙烯(UHMWPE)、聚氨酯、聚酯、聚酰亚胺、尼龙和聚丙烯。
在一些实例中,保持突片与主体202成一体。在一些这类实例中,保持突片和主体202用于整体单元。在一些实例中,保持突片中的一个或多个联接到主体202。在一些实例中,主体202在其各自末端中的每个出保持突片处或在其内终止。应了解,任何合适方法可用于将保持突片联接到主体202,包括但不限于夹紧、胶合、钉扎、系结或利用一个或多个扣紧装置,如所属领域的技术人员将了解。如图所示,保持突片210和212压接到主体202上。
在各种实施例中,缝合线系绳200被配置成从递送配置转换到展开配置,使得缝合线系绳200可以最小轮廓递送到目标区域,并且随后以最小化保持突片与胃肠道装置100断开联接的可能性的方式展开(例如与胃肠道装置100)联接。一般来说,当转换到展开配置时,缝合线系绳200的保持突片中的一个或多个改变形状和/或相对于主体202定向。在各种实例中,保持突片210和212中的一个或多个联接到缝合线系绳200,使得当不受限制时,偏置保持突片以采用展开配置。这类配置提供第一和第二保持突片210和212中的一个或多个在解剖结构内展开时将采用或以其它方式自然地转换到展开配置。在一些实例中,在展开时自然地转换到展开配置可通过在主体202中产生预先形成弯曲实现。
图4B示出在部分展开配置中的缝合线系绳200,以说明第一和第二保持突片210和212在递送和展开配置中的一个非限制性实例。具体来说,在图4B中,第一保持突片210在展开配置中定向,同时第二保持突片212在递送配置中定向。如图所示,第一保持突片210的定向与第二保持突片212的定向不同。在一些实例中,在展开配置中,保持突片横向于主体202定向(或以其它方式横向于主体202延伸)。举例来说,如图4B所示,第一保持突片210(其在展开配置中说明),横向于主体202延伸。在一些实例中,在递送配置中,保持突片大体上沿主体202或与其成一直线延伸。举例来说,如在图4B中示出,第二保持突片212(其在递送配置中说明)大体上沿主体202或与其成一直线延伸。
此外,如图4A所示,主体202终止于或以另外联接到在其中间部分处的保持突片210和212。举例来说,如图4A所示,主体202终止于在第一保持突片210的第一末端214和第二末端216之间的中间部分218处的第一保持突片210。因此,在各种实例中,保持突片联接到主体202,使得保持突片的两个或更多个部分远离主体202突出。如图4A所示,在展开配置中,第一末端214和第二末端216远离主体202延伸或突出。
如上文提到,在递送配置中,缝合线系绳200维持最小轮廓。在一些实例中,保持突片包括一个或多个特征,以帮助促进最小递送轮廓。举例来说,如图4A所示,第一保持突片210包括在被配置成在递送配置中接纳缝合线系绳200的主体第一保持突片210中形成的凸起220。举例来说,如图4B所示,在递送配置中,主体202通过在第二保持突片212中的凸起220接纳。
应了解,尽管在上文讨论的实施例和实例中将保持突片210和212说明为相对于主体202改变定向,但是在各种实施例中,当缝合线系绳200从递送配置转换到展开配置时,缝合线系绳200的保持突片可另外地或替代地改变尺寸和/或形状。举例来说,在一些情况下,保持突片为充气构件。在一些其它实例中,保持突片为从递送轮廓扩张到展开轮廓的可扩张构件。在一些这类实例中,保持构件为自扩张的。在一些实例中,保持突片为圆盘形。在某一实例中,保持突片包括一个或多个被配置成在展开配置中远离主体202突出的瓣片。应了解,可利用用于保持构件的任何合适的配置,其条件是保持构件转换到展开配置最小化保持突片与胃肠道装置100断开联接的可能性。
图5为图3的截面视图,说明展开缝合线系绳200。如图所示,在各种实例中,缝合线系绳200被配置成从胃肠道装置100的近侧部分130延伸到胃肠道装置100的远侧部分132。在一些实例中,缝合线系绳200被配置成穿透胃肠道装置100的近侧和远侧部分130和132中的一个或多个,以及周围解剖结构的一个或多个部分。如下文更详细地讨论,缝合线系绳200在解剖结构内展开,使得它穿透幽门括约肌26(例如与幽门20相关联的肌肉)。
如图5所示,缝合线系绳200穿透胃肠道装置100的近侧部分130。在一些实例中,缝合线系绳200穿透近侧部分130的近侧壁凸缘148。在一些实例中,第二保持突片212邻近在胃肠道装置100的胃侧上的近侧壁凸缘148定位。也就是说,在各种实例中,展开缝合线系绳200,使得近侧部分130的近侧壁凸缘148(或大体上近侧部分130)位于第二保持突片212和夹在胃肠道装置100的近侧和远侧部分130和132之间的幽门20的组织(例如幽门括约肌26)之间。
类似地,如图5所示,缝合线系绳200穿透胃肠道装置100的远侧部分132。在一些实例中,缝合线系绳200穿远侧部分132的远侧壁凸缘150。在一些实例中,第一保持突片210邻近在胃肠道装置100的十二指肠侧上的远侧壁凸缘150定位。也就是说,在各种实例中,展开缝合线系绳200,使得远侧部分132的远侧壁凸缘150(或大体上远侧部分132)位于第一保持突片210和夹在胃肠道装置100的近侧和远侧部分130和132之间的幽门20的组织(例如幽门括约肌26)之间。
在各种实例中,展开缝合线系绳200,使得缝合线系绳200在近侧和远侧部分130和132之间跨越,而不穿透胃肠道装置100的颈部部分134。举例来说,如图5所示,展开缝合线系绳200,使得它穿透近侧和远侧部分130和132中的每个到胃肠道装置100并且在其间跨越,而不穿透胃肠道装置100的颈部部分134。换句话说,在各种实例中,展开缝合线系绳200,并且在从颈部部分134径向向外的一个或多个位置处穿透胃肠道装置100。
应了解,一个或多个缝合线系绳200可用以将胃肠道装置100紧固到周围解剖结构。举例来说,在一些实例中,可展开三个缝合线系绳200以将胃肠道装置100紧固到周围解剖结构。在一些这类实例中,缝合线系绳200大体上绕胃肠道装置100均匀分布。举例来说,在三个缝合线系绳200用于将胃肠道装置100紧固到周围解剖结构的情况下,缝合线系绳200各自可相隔120度定位。
还应了解,这类配置提供将操作一个或多个缝合线系绳200以最小化胃肠道装置100原位绕胃肠道装置100的纵向轴线的旋转,以及胃肠道装置100相对于幽门20的移动。
已发现,有助于胃肠道植入物(和具体来说位于幽门中的那些)的移位和移动的因素中的一个涉及由于周围组织的自然收缩和运动在幽门括约肌26的任一侧上的胃肠道植入物的部分的相对回转。举例来说,随着远侧部分132和/或颈部部分134的回转相对于近侧部分130增加,胃肠道装置100变形并且失去其充分贴合幽门20的解剖结构的能力。此贴合问题导致近侧部分130的表面积的减小,所述表面积与邻近近侧部分130的幽门20的解剖结构反应或以其它方式接合,由此减小胃肠道装置100抵抗移位和移动的能力。给定足够量的回转,与周围解剖结构的自然收缩和运动组合,胃肠道装置100的有效表面积将不足以维持胃肠道装置100保持在幽门20内,并且胃肠道装置100将移位。
由此,缝合线系绳200操作为第二锚定机构,其用以最小化近侧和远侧部分130和132(和/或颈部部分134)相对于彼此和/或相对于周围解剖结构的相对回转。缝合线系绳200通过穿透周围解剖结构和胃肠道装置100的近侧和远侧部分130和132中的一个或多个将胃肠道装置100物理紧固到周围解剖结构。在一些这类实例中,操作缝合线系绳200以维持解剖结构和缝合线系绳200联接到的胃肠道装置100的部分的相对对准。在一些实例中,操作此类配置以最大化并且维持可供用于与周围解剖结构反应或以其它方式接合以防止移位和/或移动的胃肠道装置100的有效表面积。
在其中缝合线系绳200延伸通过周围解剖结构和胃肠道装置100的近侧和远侧部分130和132中的每个的那些配置中,另外操作缝合线系绳200以最小化在胃肠道装置100的近侧和远侧部分130和132之间的相对回转量,由此最小化胃肠道装置100的变形量。通过进一步最小化胃肠道装置100的变形量,操作缝合线系绳200以最大化并且维持可供用于与周围解剖结构反应或以其它方式接合以防止移位和/或移动的胃肠道装置100的有效表面积。
在各种实例中,近侧和远侧部分130和132相对于彼此自由回转的量至少部分地基于缝合线系绳200的长度相对于近侧和远侧部分130和132之间的距离,如所属领域的技术人员将了解。在一些实例中,缝合线系绳200的长度(例如,在第一和第二保持突片210和212之间的距离)超过给定胃肠道装置的近侧和远侧壁凸缘之间的距离,使得第一和第二保持突片210和212当植入或将给定胃肠道装置的近侧和远侧壁凸缘箍缩在一起时不接触组织。举例来说,在一些非限制性实例中,在胃肠道装置的近侧和远侧壁凸缘之间的距离可为十一毫米,而在缝合线系绳200的第一和第二保持突片210和212之间的距离可在十五和三十毫米之间。在一些实例中,以此方式选择或配置缝合线系绳帮助避免压力坏死、溃疡和对解剖结构的其它损坏。此外,选择或配置缝合线系绳具有超过在给定胃肠道装置的近侧和远侧壁凸缘之间的距离的长度允许胃肠道装置随着周围解剖结构与消化行为相关联的移动动态调节解剖结构。给定缝合线系绳200相对于近侧和远侧部分130和132之间的距离越长,在近侧和远侧部分130和132之间的可能的回转量越大。在近侧和远侧部分130和132之间的一定程度的回转可为期望的。举例来说,在近侧和远侧部分130和132之间的一定程度的回转可提供更适当地贴合周围解剖结构的胃肠道装置100。
胃肠道装置100的合适的构造的实例在美国专利申请第15/060,418号、第14/872,990号和第15/600,214号中说明和描述,所述专利的内容以引用的方式并入本文中。应了解,胃肠道装置100可根据所属领域的普通技术人员已知的方法递送。在上文提到的美国专利申请第15/060,418号、第14/872,990号和第15/600,214号中说明和描述用于递送胃肠道装置100的合适的方法的实例。
在各种实例中,胃肠道装置100可包括一个或多个锚定部件,其独立地或共同地操作以维持胃肠道装置100在患者的解剖结构内的位置。在一些实例中,套管120可附接到锚定110,如所属领域的技术人员将了解。还应了解,胃肠道装置100可为植入物、胃肠道植入物或幽门植入物。
在各种实施例中,胃肠道装置100和缝合线系绳200可在如上文所讨论的递送配置中在内窥镜下植入到患者的解剖结构内和/或从患者的解剖结构中取出。一般来说,在递送配置中,胃肠道装置100和/或缝合线系绳200在闭合、压缩或折叠配置中,因为它们具有比展开轮廓小的轮廓,如将了解。
图6到11示出递送系统300和用于递送和展开缝合线系绳200中的一个或多个以将胃肠道装置100紧固在患者的解剖结构内的相关联的操作。如图6和7所示,递送系统300包括具有针推动元件304和缝合线系绳推动元件306的手柄302。在各种实例中,递送系统另外包括具有近侧末端310和远侧末端312的细长元件308。在一些实例中,细长元件308为导管。在各种实例中,手柄302与细长元件308可操作联接。在一些实例中,手柄302联接到细长元件308的近侧末端310。应了解,本文中所讨论的各种递送系统(包括递送系统300)可经一个或多个导丝递送。
图8为沿图7的线8-8截取的细长元件308的远侧末端312的截面视图。如图8所示,在各种实例中,递送系统另外包括针314和缝合线系绳推进器316。在各种实例中,缝合线系绳推进器316和针314各自同轴地位于细长元件308内。因此,在各种实例中,细长元件308包括延伸通过其的腔。在各种实例中,针314同轴地收纳在细长元件308的腔内。在一些实例中,缝合线系绳推进器316同轴地收纳在针314的腔内。
如下文更详细地讨论,在一些实例中,缝合线系绳200另外位于针314的腔内。在各种实例中,针314可操作地联接到手柄302的针推动元件304。应了解,针314可经由任何合适构件或机构与针推动元件304联接,其条件是针推动元件304的致动引起针314的相应致动。在一些实例中,针314可由具有近侧末端和远侧末端的中空细长元件形成,其中形成针314的中空细长元件延伸通过细长元件308的腔。在一些这类实例中,形成针314的细长元件的近侧末端联接到针推动元件304,并且形成针314的细长元件的远侧末端被配置为适于刺破并且驱动通过组织的尖锐尖端。在一些其它实例中,针314可联接到延伸通过细长元件308的构件。在各种实施例中,针314的远侧末端为刚性的并且足够长以在其递送期间将缝合线系绳200保持在折叠配置中。在一些实例中,针314的远侧末端联接到延伸回到在手柄中的针推动元件304的柔性轴。针314的特性使得近侧部分具有足够的柔性,以在导航通过解剖结构期间弯曲,同时远侧部分具有足够刚度,以允许用户将针的远侧末端推动通过目标组织。在一些实例中,针314的近侧部分可由高硬度聚合物构成,如PEEK、尼龙和聚氨基甲酸酯。针的较硬的远侧部分可由生物相容的不锈钢、镍钛诺或类似金属制成,并且可处理以包括用于刺破组织的尖锐尖端。然而,应了解,针314的全长可由单片镍钛诺,或已以此方式改性的不锈钢管的长度形成,以使其近侧部分足够柔性以导航解剖结构。在一些这类实例中,针的全长可由不锈钢管形成,所述不锈钢管已在螺旋配置中沿其长度的一部分(例如沿近侧部分)激光切割。
在各种实例中,针推动元件304的致动引起针314的相应致动。当致动时,针314大体上相对于细长元件308平移(例如向近侧或向远侧),如下文更详细地讨论。在一些实例中,可致动针推动元件304以使针314在收起和展开状态之间转换。在收起状态中,针314在细长元件308内收起或以其它方式隐藏。也就是说,在收起状态中,针314的远侧尖端定位在细长元件308的远侧末端312的近侧。收起状态大体上与针推动元件304向近侧推进到递送位置对应。递送系统300在图6和7中示出,其中针推动元件304定位在递送位置。
另一方面,在展开状态中,针314从细长元件308的远侧末端312延伸,使得针的远侧尖端定位在细长元件308的远侧末端312的远侧。展开状态大体上与针推动元件304向远侧推进到展开位置对应。当针推动元件304从递送位置转换到展开位置时(例如,当针推动元件304向远侧推进时),针314相对于细长元件308向远侧平移。也就是说,在各种实例中,针推动元件304相对于手柄302和/或细长元件308和/或缝合线系绳推动元件306的远侧致动引起针314相对于细长元件308远侧平移。
递送系统300在图9和10中示出,其中针推动元件304定位在展开位置。举例来说,如图9所示,针推动元件304已相对于手柄302和缝合线系绳推动元件306向远侧推进。此外,如图所示,针314已相对于细长元件308向远侧推进,使得针314的一部分暴露。具体来说,如图所示,针314的远侧尖端或末端318定位在细长元件308的远侧末端312的远侧。
在一些实例中,针推动元件304的推进另外引起缝合线系绳推进器316的推进。通过展开递送系统300的机构促进这类配置。也就是说,在各种实例中,递送系统300包括能够被操作以引起缝合线系绳推进器316和针314同时运动的展开机构320。如下文进一步讨论,展开机构320进一步被配置成促进缝合线系绳推进器316相对于针314的独立致动。图11为递送系统300的前透视图,其中移除手柄302的一部分以说明展开机构320和其各个部件。如图所示,展开机构320包括壳体322和滑动构件324。滑动构件324被配置成相对于壳体322滑动。
如图所示,针314的近侧末端联接到展开机构320的壳体322,而缝合线系绳推进器316的近侧末端联接到滑动构件324。此外,如图所示,针推动元件304可操作地联接到壳体322的远侧末端。然而,应了解,在不脱离本申请的精神或范围的情况下,针推动元件304可以任何合适方式联接到壳体322的任何部分,其条件是针推动元件304的致动引起壳体322的致动,这继而引起针314相对于细长元件308的致动。类似地,因为滑动构件324位于壳体322内,所以滑动构件324能够被操作以与壳体322一起平移。因此,针推动元件304的致动引起壳体322和滑动构件324平移。滑动构件324与壳体322一起的此平移引起针314和缝合线系绳推进器316同时平移,如所属领域的技术人员将了解。
还应了解,因为缝合线系绳推进器316联接到滑动构件324并且因为滑动构件324能够被操作以相对于壳体322和针314平移,所以滑动构件324可致动以引起缝合线系绳推进器316相对于壳体322和针314平移。因此,除了与壳体322的致动结合致动之外,缝合线系绳推进器316可进一步或另外与滑动构件324相对于壳体322的致动结合致动。
在各种实例中,滑动构件324能够被操作以相对于壳体322推进和缩回。因此,在各种实例中,缝合线系绳推进器316能够被操作以相对于针314推进和缩回。具体来说,滑动构件324相对于壳体322的远侧推进或平移引起缝合线系绳推进器316相对于针314的相应远侧推进。应了解,可利用各种其它机构以引起缝合线系绳推进器相对于针314推进和缩回。因此,上文讨论的实例不应被理解为限制性的。相反,应了解,可被配置成引起针314和缝合线系绳推进器316同时操作以及缝合线系绳推进器相对于针314独立推进和缩回的那些机构和其等效物落入本申请的精神和范围内。举例来说,其中滑动机构相对于壳体322的近侧平移的配置引起缝合线系绳推进器316相对于针314的远侧推进落在本申请的精神和范围内。
在各种实例中,如上文提到,滑动构件324可相对于壳体322向远侧推进以引起缝合线系绳推进器316相对于针314向远侧推进。在一些实例中,如上文提到,缝合线系绳推进器316相对于针314的这类远侧平移能够被操作以引起缝合线系绳200相对于针314展开或平移。具体来说,如上文所讨论,在各种实例中,递送系统300能够被操作以将一个或多个缝合线系绳200递送到解剖结构内的治疗部位。在一些这类实例中,缝合线系绳200装入递送系统中,推进到治疗部位,并且展开。在一些这类实例中,缝合线系绳200装入针314的腔中,使得缝合线系绳200位于缝合线系绳推进器316的远侧末端的远侧。因此,在缝合线系绳推进器316相对于针314向远侧推进时,缝合线系绳200也是如此。
在各种实例中,缝合线系绳推动元件306能够被操作以引起缝合线系绳推进器316的相应致动,如上文所讨论。具体来说,当缝合线系绳推动元件306致动时,缝合线系绳推进器316大体上相对于细长元件308平移。在各种实例中,缝合线系绳推动元件306的近侧推进或平移与缝合线系绳推进器316的近侧推进或平移对应。类似地,在各种实例中,缝合线系绳推动元件306的远侧缩回或平移与缝合线系绳推进器316的远侧缩回或平移对应。在一些实例中,类似于针推动元件304,缝合线系绳推动元件306可由此致动,以使缝合线系绳推进器316在收起和展开状态之间转换。在收起状态中,缝合线系绳推进器316在针314的腔内收起或以其它方式隐藏,使得缝合线系绳200可放置在针314内,使得第一和第二末端204和206位于针314的远侧尖端或末端318的近侧。也就是说,在收起状态中,针314的远侧尖端定位在缝合线系绳200的第一和第二末端204和206的远侧并且定位在缝合线系绳推进器316的远侧末端的远侧。收起状态大体上与缝合线系绳推动元件306位于递送位置对应。这可包括将缝合线系绳推动元件306向近侧推进或缩回到递送位置。递送系统300在图9和11中示出,其中缝合线系绳推动元件306位于递送位置。
另一方面,在展开状态中,缝合线系绳推进器316向远侧推进,使得缝合线系绳200的第二末端206从针314的腔强制或弹出。也就是说,在各种实例中,当缝合线系绳推动元件306推进到展开位置时,缝合线系绳200仅部分从针314的腔弹出。在一些实例中,在针推动元件304从递送位置转换到展开位置时(例如,在针推动元件304向远侧推进时),缝合线系绳推进器316相对于针314向远侧平移。缝合线系绳推进器316相对于针314的此远侧推进或平移引起缝合线系绳推进器316接合在针314的腔内收起的缝合线系绳200并且引起缝合线系绳200相对于针314推进。
递送系统300在图12和13中示出,其中缝合线系绳推动元件306定位在展开位置。具体来说,如图12所示,缝合线系绳推动元件306和滑动构件324已各自相对于手柄302和壳体322向远侧推进。如图所示,缝合线系绳200的第二末端206从针314的远侧尖端或末端318延伸。然而,如图所示,在缝合线系绳推动元件306定位在展开位置的情况下和在针推动元件304在展开位置的情况下,缝合线系绳200的一部分(例如第一末端204)保持在针314的腔内收起。如下文更详细地讨论,这类配置提供针314可从组织的第一侧到组织的第二侧推进通过组织,并且缝合线系绳200的第二末端206在组织的第二侧上展开同时维持在组织的第一侧上展开缝合线系绳的第一末端204的能力。
在一些实例中,递送系统300包括一个或多个特征,其操作以最小化缝合线系绳200的不期望的预展开的可能性。具体来说,并且参考图9和12,递送系统300被配置成使得在缝合线系绳推动元件306可相对于手柄302向远侧推进之前必须按下缝合线系绳推动元件306的一个或多个突片326。图9示出在未压下配置中的缝合线系绳推动元件306的一个或多个突片326,而图12示出在按下配置中的缝合线系绳推动元件306的一个或多个突片326。
此外,在一些实例中,缝合线系绳推动元件306不能按下直到针推动元件304向远侧推进或平移到展开位置。在一些这类实例中,壳体322包括一个或多个阻挡特征(未示出),其操作以防止当针推动元件304位于递送位置时,缝合线系绳推动元件306的一个或多个突片326被按下。然而,在将针推动元件304推进到展开位置并且由此相对于手柄302和缝合线系绳推动元件306向远侧推进壳体322时,壳体的一个或多个阻挡特征推进到其中它们不再操作以防止缝合线系绳推动元件306的一个或多个突片326被按下的位置。在一些实例中,壳体另外地或替代地包括被配置成接纳缝合线系绳推动元件306的一个或多个突片326一个或多个特征,使得当壳体322根据针推动元件304向远侧推进到展开位置推进时,壳体322被配置成接纳缝合线系绳推动元件306的一个或多个突片326的特征恰当地相对于缝合线系绳推动元件306定位,使得可按下缝合线系绳推动元件306的一个或多个突片326。这类接纳特征的非限制性实例包括在壳体332中的一个或多个槽、孔隙或凸起
在一些实例中,在缝合线系绳200已从针314的远侧末端318部分展开之后,缝合线系绳推动元件306可缩回或向近侧推进到递送位置。当缩回到递送位置时,缝合线系绳推进器316大体上相对于针314向近侧撤回。图14说明缝合线系绳推动元件306缩回到递送位置,其中缝合线系绳200的第二末端206从针314的远侧末端318展开。应了解,在各种实例中,在展开缝合线系绳200的剩余部分之前,缝合线系绳推动元件306不必从展开向近侧撤回。
在各种实例中,在部分展开缝合线系绳200的第二末端206之后,针推动元件304可相对于手柄302缩回或向近侧撤回。在一些实例中,向近侧撤回针推动元件304引起针314相对于细长元件308向近侧撤回。在一些实例中,向近侧撤回针推动元件304同样地引起针314相对于缝合线系绳200向近侧撤回,使得缝合线系绳200从针314的腔完全移除。在一些实例中,操作第二保持突片212以在针314缩回或向近侧撤回时维持缝合线系绳200的位置,如下文更详细地讨论。
递送系统300在图15和16中示出,其中针推动元件304缩回或向近侧撤回到递送位置,其中缝合线系绳200从针314的远侧末端318完全展开。当完全展开时,缝合线系绳200的第一和第二末端204和206从针314的腔弹出并且不再位于其中。在各种实例中,在针314的远侧末端318向近侧撤回或缩回到缝合线系绳200的第一末端204的近侧的位置时,第一保持突片210自由转换到展开配置,如上文所讨论。如图所示,针314已相对于细长元件308向近侧撤回或缩回,使得针314的远侧末端318位于细长元件308的腔内并且在细长元件308的远侧末端312的近侧。
图17到20示出用于将缝合线系绳200递送并且附接到患者的解剖结构和胃肠道装置100以紧固胃肠道装置100以免移位和/或移动的程序。应了解,在一些实施例,递送系统300的一个或多个部件被配置成配合在标准内窥镜的工作通道或腔内,如所属领域的技术人员将了解。举例来说,在一些实例中,细长元件308的大小被设定成使得细长元件可插入到内窥镜的腔中并且推进通过其。应了解,在一些实例中,在内窥镜已导航通过患者的解剖结构到治疗部位之后,细长元件308插入到内窥镜的工作腔中并且推进通过其。
图17示出胃肠道装置100,参考图1到3描述,在胃16和肠18之间的幽门20处定位在患者体内。为了清晰起见,在图17到20中,患者的解剖结构已剖切。在一些情况下,内窥镜600可用于查看胃肠道装置100的位置。另外地或替代地,内窥镜600的管还可用于将细长元件308引导向胃肠道装置100和选择用于展开缝合线系绳的位置。在一些实例中,如下文更详细地讨论,一个或多个定位器辅助物可推进治疗部位,并且帮助将细长元件308引导向胃肠道装置100和选择用于展开缝合线系绳的位置,同时在细长元件308的远侧末端312推进通过胃肠道装置100和相关联的解剖结构时,和在缝合线系绳200展开时,帮助维持细长元件308相对于胃肠道装置100的位置。此外,如下文进一步讨论,缝合线系绳可经由完全独立于内窥镜的递送系统递送。也就是说,尽管内窥镜可用以观察治疗区域,但是缝合线系绳200的递送经由完全独立于内窥镜操作的递送系统实现。
如图17所示,内窥镜定位在大约十二点钟位置处,其中细长元件308的远侧末端312位于邻近近侧部分130的近侧壁凸缘148。图18示出从细长元件308的远侧末端312延伸的针314。针314已相对于细长元件308向远侧推进,使得针314延伸通过近侧壁凸缘148,通过幽门括约肌26,并且通过远侧壁凸缘150。图19示出在解剖结构内递送和展开的缝合线系绳200。应了解,缝合线系绳200根据本文描述递送和展开。具体来说,如图所示,缝合线系绳200在十二点钟位置处延伸通过近侧壁凸缘148,通过幽门括约肌26,并且通过远侧壁凸缘150,使得第一保持突片210位于近侧壁凸缘148的近侧,并且使得第二保持突片212位于远侧壁凸缘150的远侧。
如上文提到,一个或多个定位器辅助物可推进治疗部位,并且帮助将细长元件308引导向胃肠道装置100和选择用于展开缝合线系绳的位置,同时在细长元件308的远侧末端312和/或针314推进通过胃肠道装置100和相关联的解剖结构时,和在缝合线系绳200展开时,帮助维持细长元件308相对于胃肠道装置100的位置。因此,尽管内窥镜的管可用于将细长元件308引导向胃肠道装置100和选择用于展开缝合线系绳的位置,但是在一些实例中,一个或多个额外递送辅助物可用于与内窥镜组合以完成递送缝合线系绳200。
现在转到图20A和20B,递送系统400包括被配置成与内窥镜600一起操作帮助促进将缝合线系绳200递送到目标治疗区域的定位器导管500。在各种实例中,定位器导管500包括细长元件510、定位器胶囊520和罩530。如图所示,定位器胶囊位于细长元件510的远侧末端512处或附近。如图所示,罩530位于定位器胶囊520的近侧。在一些实例中,如图所示,罩530位于内窥镜600和定位器胶囊520之间。
在各种实例中,递送系统400被配置成与内窥镜600对接。举例来说,在一些实例中,如图所示,定位器导管500包括一个或多个内窥镜接合特征540,其被配置成限制内窥镜600相对于定位器导管500的径向位置。通过限制内窥镜600相对于定位器导管500的径向位置,在递送缝合线系绳200期间,在细长元件308的远侧末端312和/或针314被驱动通过胃肠道装置和邻接解剖结构时,递送系统400可帮助控制或限制细长元件308相对于胃肠道装置的位置。
继续参考图20A和20B,定位器胶囊520被配置成接合或以其它方式对接已在解剖结构内展开的胃肠道装置。在定位器胶囊520和展开的胃肠道装置之间的接合帮助维持或限制在缝合线系绳200递送和展开时递送系统300的定向。在一些实例中,定位器胶囊520包括以与展开的胃肠道装置的形状和大小互补的方式成形和设定大小的主体522。举例来说,在一些实例中,主体522为圆柱形,并且被配置成收纳在展开的胃肠道装置的通腔内,以引起在定位器胶囊520和胃肠道装置之间的接合。
在一些实例中,罩530被配置成接纳细长元件308。举例来说,如图20A所示,在递送缝合线系绳200期间,罩530定位在内窥镜600和定位器胶囊520(并且由此展开的胃肠道装置)之间,使得细长元件308在其从内窥镜600向展开的胃肠道装置推进时延伸通过罩530。在一些实例中,如图所示,罩530包括孔隙或通道532,其被配置成当细长元件308延伸通过罩530时接纳并且限制细长元件308的径向位置。应了解,限制内窥镜600和/或细长元件308相对于定位器胶囊520(并且由此展开的胃肠道装置)的径向位置帮助限制缝合线系绳200展开的径向位置。因此,递送系统400可用于帮助确保缝合线系绳200被递送通过幽门组织,并且帮助最小化在递送程序期间胃或小肠的壁被无意穿刺的风险,并且由此帮助最小化缝合线系绳200被递送通过胃或小肠的壁的风险,如上文所提到。
此外,如上文提到,在各种实例中,与内窥镜分开的递送系统被配置成推进到治疗区域,并且被配置成递送和展开缝合线系绳200。现在转到图21A-21E,示出递送系统700并且包括导管710和定位器系统720。在一些实例中,导管710为导管,并且定位器系统720位于导管710的远侧末端712处或附近。在一些实例中,如图所示,导管710包括用于接纳导丝(GW)的通腔。应了解,递送系统700在图21A-21E中说明,没有相应胃肠道装置或周围解剖结构,以更清楚地描绘递送系统700的元件和特征。下文关于至少图23A-24B示出和描述具有胃肠道装置和/或在解剖结构内的递送系统700的操作。
在各种实例中,定位器系统720被配置成接合或以其它方式对接已在解剖结构内展开的胃肠道装置。在定位器系统720和展开的胃肠道装置之间的接合帮助维持或限制在缝合线系绳200递送和展开时递送系统700的定向。在一些实例中,定位器系统720包括定位器胶囊722,其具有成以与展开的胃肠道装置的形状和大小互补的方式形并且设定大小的主体,这与上文提到的定位器胶囊520相似。因此,在一些实例中,定位器胶囊722可为圆柱形,并且被配置成收纳在展开的胃肠道装置的通腔内,以引起在定位器胶囊722和胃肠道装置之间的接合。然而,应了解,定位器胶囊722可被配置成以许多其它合适的方式对接或接合展开的胃肠道装置,其条件是操作在定位器胶囊722和胃肠道装置之间的接合,以在缝合线系绳200递送和展开时,维持或限制递送系统700的定向。
在一些实例中,定位器系统720另外包括多个可延伸臂,包括第一可延伸臂724和第二可延伸臂726,可选择性地展开以帮助促进递送缝合线系绳200。在各种实例中,第一和第二可延伸臂724和726彼此纵向间隔开,使得当第一和第二可延伸臂724和726从定位器胶囊722径向延伸时,间隙限定在第一和第二可延伸臂724和726之间。举例来说,如图所示,第一可延伸臂724比第二可延伸臂726更接近定位器胶囊722的远侧末端721定位。同样地,如图所示,第二可延伸臂726比第一可延伸臂724更接近定位器胶囊722的近侧末端723定位。如下文进一步讨论,在第一和第二可延伸臂724和726之间的间隙被配置成使得第一和第二可延伸臂724和726可跨胃肠道装置的颈部部分,使得第一可延伸臂724定位在胃肠道装置的远侧壁凸缘的远侧,同时第一可延伸臂724定位在胃肠道装置的近侧壁凸缘的近侧。如下文进一步讨论,这类配置帮助维持在缝合线系绳200递送和展开期间递送系统700的纵向和径向位置。
此外,如图所示,定位器系统720被配置成使得第一和第二可延伸臂724和726能够被操作以从定位器胶囊722选择性地径向延伸。因此,应了解,这类配置提供递送系统700在递送配置(例如其中第一和第二可延伸臂724和726在定位器胶囊722收起内)和展开配置(例如其中第一和第二可延伸臂724和726从定位器胶囊722径向突出)之间可转换。包括第一和第二可延伸臂724和726的配置帮助提供递送系统700维持最小递送轮廓。
图21A-21C说明第一和第二可延伸臂724和726的展开顺序。图21A示出在递送配置中的递送系统700,其中第一和第二可延伸臂724和726在定位器胶囊722内收起。图21B示出部分径向延伸的第一和第二可延伸臂724和726。图21C示出在展开配置中的递送系统700,其中第一和第二可延伸臂724和726完全径向延伸。在各种实例中,递送系统700被配置成包括细长元件308。举例来说,如图21A-21E所示,细长元件308联接到定位器系统720的第二可延伸臂726。在细长元件308和定位器系统720之间的此联接帮助限制在缝合线系绳200递送期间细长元件308(并且由此针314)相对于定位器系统720的位置。因此,在如图21A所示的递送配置中,细长元件308位于相对于定位器胶囊722的第一径向位置(例如,在第二可延伸臂726处的细长元件308的纵向轴线处于相对于定位器胶囊722的纵向轴线的第一径向位置)。在此第一径向位置,细长元件308与其中缝合线系绳200将延伸通过胃肠道植入物的目标位置未对准。另一方面,在图21C所示的展开配置中,细长元件308位于相对于定位器胶囊722的第二径向位置(例如,在第二可延伸臂726处的细长元件308的纵向轴线处于相对于定位器胶囊722的纵向轴线的第二径向位置)。在一些实例中,第二径向位置为比第一径向位置更径向远离定位器胶囊722的纵向轴线的径向位置。在此第二径向位置,细长元件308与其中缝合线系绳200将延伸通过胃肠道植入物的目标位置对准。
此外,如上文提到,定位器胶囊722被配置成接合展开的胃肠道装置,以帮助限制在缝合线系绳200递送和展开期间定位器系统720相对于胃肠道装置的位置。因此,应了解,在细长元件308和定位器系统720之间的联接帮助限制在缝合线系绳200递送和展开期间针314相对于胃肠道装置的位置。
图21D-21E说明针314从细长元件308的推进和缝合线系绳从其展开。图21D示出针314从细长元件308推进,使得针314跨第一和第二可延伸臂724和726之间的间隙延伸。图21E示出针314部分缩回,以显示缝合线系绳200,其中展开缝合线系绳200的第一保持突片210。因此,如图21D和21E所示,递送系统700被配置成使得针314(并且由此缝合线系绳200)可跨第一和第二可延伸臂724和726之间的间隙推进,并且由此被配置成使得针314(并且由此缝合线系绳200)可从展开的胃肠道装置的近侧壁凸缘的近侧位置推进到展开的胃肠道装置的远侧壁凸缘的远侧位置。
在各种实例中,第一和第二可延伸臂724和726可由用户如借助于从身体外部的递送手柄(例如手柄302)选择性地驱动。在一些实例中,在第一和第二可延伸臂724和726从定位器胶囊722径向延伸时,在第一和第二可延伸臂724和726之间的相对距离减小。举例来说,如图21B和21C所示,在第一和第二可延伸臂724和726之间的相对距离从图21B中示出的第一和第二可延伸臂724和726的位置减小到在图21C中示出的第一和第二可延伸臂724和726的位置。因此,在一些实例中,在第一和第二可延伸臂724和726展开时,在第一和第二可延伸臂724和726之间的间隙减小。在一些实例中,第一可延伸臂724被配置成在第一和第二可延伸臂724和726从定位器胶囊722径向延伸时向第二可延伸臂726平移。在一些实例中,第二可延伸臂726被配置成在第一和第二可延伸臂724和726从定位器胶囊722径向延伸时向第一可延伸臂724平移。
现在转向图22,示出递送系统700,其中定位器胶囊722分成两半(722A和722B),以显示定位器胶囊722和第一和第二可延伸臂724和726的非限制性示例性内部配置。应了解,为了清晰起见已移除细长元件308(并且应被理解为可联接到第二可延伸臂726)。如图所示,第一可延伸臂724包括具有突出部728的主体。尽管未示出,但是应了解,第一可延伸臂724可包括在其主体的相对侧上的类似突出部。类似地,如图所示,第二可延伸臂726包括具有突出部730的主体,并且可包括在其主体的相对侧上的类似突出部(未示出)。
此外,如图所示,定位器胶囊722的第一半722A包括多个凹槽或通道,包括第一通道732和第二通道734。尽管未示出(由于存在第一和第二可延伸臂724和726),但是应了解,定位器胶囊722的第二半722B可包括大小、形状和位置与定位器胶囊722的第一半722A的通道732和734类似的多个凹槽或通道。如图所示,第一和第二通道732和734相对于定位器胶囊722的纵向轴线成角度(例如,当定位器胶囊722与胃肠道植入物接合时与展开的胃肠道植入物的纵向轴线同轴)。在一些实例中,定位器胶囊722的纵向轴线与导管710的纵向轴线平行。尽管以相对于定位器胶囊722的纵向轴线大约四十五度示出,但是应了解,第一和第二通道732和734中的至少一个可以实际上在零度和九十度之间的任何角度成角度。如下文进一步讨论,在第一和第二通道732和734之间的相对角度提供第一和第二可延伸臂724和726在相对于彼此平移时从定位器胶囊722径向延伸。因此,第一和第二通道732和734的角度可小于四十五度或替代地,大于四十五度。如所属本领域的技术人员将了解,可延伸臂724和726中的第一个可以零或九十度成角度,其条件是可延伸臂724和726中的另一个以与零和九十度不同的角度成角度。
在各种实例中,第一个通道732被配置成收纳第一可延伸臂724的突出部728,使得第一可延伸臂724的突出部728在通道732内行进并且另外受其限制。在突出部728和第一通道732之间的此关系提供在第一和第二可延伸臂724和726相对于彼此平移时第一可延伸臂724从定位器胶囊722径向延伸。类似地,第二通道734被配置成收纳第二可延伸臂726的突出部730,使得第二可延伸臂726的突出部730在通道734内行进并且另外受其限制。在突出部730和通道734之间的此关系提供在第一和第二可延伸臂724和726相对于彼此平移时第二可延伸臂726从定位器胶囊722径向延伸。
如上文提到,在各种实例中,定位器胶囊722联接到导管710。在一些实例中,导管710包括第一细长元件711和第二细长元件713。在一些实例中,第一细长元件711延伸通过第二细长元件713的腔,如图所示,使得第一和第二细长元件711和713可相对于彼此移动。在一些实例中,第一细长元件711联接到第一可延伸臂724,而第二细长元件713联接到第二可延伸臂726和定位器胶囊722中的一个或多个。因此,应了解,第一和第二细长元件711和713可相对于彼此致动(如借助于手柄302),以引起在第一和第二可延伸臂724和726之间的相对运动。举例来说,第一细长元件711可向近侧撤回,同时第二细长元件713保持静止,以引起第一和第二可延伸臂724和726被牵拉更靠近彼此。替代地,第一细长元件711可向近侧撤回,同时第二细长元件713向远侧推进,以引起第一和第二可延伸臂724和726被牵拉更靠近彼此。
在图21A中示出的递送配置中,第一和第二可延伸臂724和726示出在彼此的第一纵向距离处(例如,沿定位器胶囊722的纵向轴线在第一和第二可延伸臂724和726之间的第一距离)。在图21C中示出的展开配置中,第一和第二可延伸臂724和726示出在彼此的第二纵向距离处(例如,沿定位器胶囊722的纵向轴线在第一和第二可延伸臂724和726之间的第二距离)。如图所示,第二纵向距离小于第一纵向距离。提供允许第一和第二可延伸臂724和726更靠近彼此牵拉的机构提供第一和第二可延伸臂724和726可接合胃肠道装置,以帮助在缝合线系绳递送和展开时限制递送系统700相对于胃肠道装置的纵向位置。举例来说,如图23A和23B所示,第一和第二可延伸臂724和726可接合胃肠道装置,并且箍缩在第一和第二可延伸臂724和726之间的近侧和远侧壁凸缘,以在缝合线系绳递送和展开时,帮助限制递送系统700相对于胃肠道装置的纵向位置,如下文进一步示出和讨论。
在一些实例中,第二可延伸臂726包括大小设定成接纳穿过孔隙并且延伸到第一可延伸臂724的第一细长元件711的孔隙。举例来说,如图22中所示,第一细长元件711延伸通过在第二可延伸臂726的主体的一部分中的孔隙并且由其延伸到第一可延伸臂724。应了解,尽管第一细长元件711延伸通过第二可延伸臂726的主体的一部分,第一细长元件711不联接到第二可延伸臂726,因为第一细长元件711能够被操作以相对于第二可延伸臂726滑动。同样地,因此,第二可延伸臂726能够被操作以相对于第一细长元件711滑动。
在一些实例中,定位器系统720另外包括偏置构件736。偏置构件736可包括一个或多个弹性元件,如一个或多个弹簧。在一些实例中,偏置构件736被配置成将第一可延伸臂724偏置远离第二可延伸臂726和/或将第二可延伸臂726偏置远离第一可延伸臂724。在一些实例中,偏置构件736替代地被配置成将第一可延伸臂724向第二可延伸臂726偏置和/或将第二可延伸臂726向第一可延伸臂724偏置。当递送系统700处于递送配置时,偏置构件736可偏置第一和/或第二可延伸臂724和726(例如,第一和第二可延伸臂724和726在定位器胶囊722内收起)。替代地,当递送系统700处于展开配置时,偏置构件736可偏置第一和/或第二可延伸臂724和726(例如,第一和第二可延伸臂724和726从定位器胶囊722径向向外延伸)。
在一些实例中,偏置构件736位于第一和第二可延伸臂724和726之间。举例来说,如图22示,偏置构件736在第一和第二可延伸臂724和726之间延伸。对于在图22中示出的递送系统700,当递送系统在展开配置中时,偏置构件736被配置成将第一和第二可延伸臂724和726偏置远离彼此(例如,第一和第二可延伸臂724和726从定位器胶囊722径向向外延伸)。如图所示,在第一细长元件711从第二可延伸臂726延伸到第一可延伸臂724时,其延伸通过偏置构件736。
此外,尽管在图22中描绘递送系统700,其中移除细长元件308,但是应理解,细长元件308可与第二可延伸臂726联接。举例来说,如图22所示,第二可延伸臂726包括被配置成接纳细长元件308的通道738(例如,如图21A-21D和23A-24B所示)。在一些实例中,通道738可被配置成使得细长元件308与定位器系统720可移除地可联接。在一些其它实例中,细长元件308与定位器系统720固定地联接。
与上文讨论和在图22中示出的定位器胶囊722的配置一致,在第一和第二可延伸臂724和726之间的相对距离减小时,在突出部728和730与第一和第二通道732和734之间的关系引起第一和第二可延伸臂724和726从定位器胶囊722径向向外延伸,如图21A-21C所示。
在一些实例中,通过在第一和第二可延伸臂724和726从定位器胶囊722径向向外延伸时将其平移更靠近彼此,第一和第二可延伸臂724和726可致动以在缝合线系绳200递送和展开时保持胃肠道装置的近侧和远侧壁凸缘使递送系统700稳定。举例来说,一旦定位器系统720的第一和第二可延伸臂724和726接合胃肠道装置,针314就可从细长元件308推进并且在已知和受控制的位置处可靠地穿刺胃肠道装置和解剖结构。在一些实例中,递送系统700由此提供针314和缝合线系绳200在相对于胃肠道装置的中心纵向轴线的指定径向距离处递送和展开。
现在转到图23A-24B,示出具有胃肠道装置100的递送系统700的操作。图23A-23B说明在生物解剖结构外与胃肠道装置100组合的递送系统700,以清楚地描绘在递送系统700和胃肠道装置100之间的相互作用。图24A到24B说明在缝合线系绳200递送和展开时在患者的解剖结构内与胃肠道装置100组合的递送系统700。
如图23A所示,定位器胶囊722延伸通过胃肠道装置100的通腔,其中第一和第二可延伸臂724和726径向向外延伸,使得第一可延伸臂724接合胃肠道装置100的远侧壁凸缘150,并且使得第二可延伸臂726接合近侧壁凸缘148。如图23B所示,针314已从细长元件308推进,使得针在第一和第二可延伸臂724和726之间延伸,并且使得针从近侧壁凸缘148跨胃肠道装置100的颈部部分134延伸到远侧壁凸缘150。
图24A示出定位器胶囊722延伸通过胃肠道装置100的通腔,其中胃肠道装置100在解剖结构内展开,并且具体来说跨幽门括约肌26。图24B示出缝合线系绳200已递送通过胃肠道装置100和幽门括约肌26,并且展开以帮助将胃肠道装置100紧固到解剖结构,并且帮助最小化胃肠道装置100从解剖结构移位的可能性。如图24B所示,在缝合线系绳200递送和展开之后,针314可缩回到细长元件308内,并且第一和第二可延伸臂724和726可致动,使得它们在递送配置中驻存在定位器胶囊722内。在递送系统700在图24B中示出的配置中的情况下,递送系统可绕胃肠道装置100的纵向轴线旋转(例如从12点钟位置旋转到四点钟位置),使得另一个缝合线系绳200可递送通过胃肠道装置100和解剖结构,并且展开以进一步帮助最小化胃肠道装置100从解剖结构移位的可能性。替代地,在递送系统700在图24B中示出的配置中的情况下,递送系统700可从解剖结构撤回,其中定位器系统720、导管710和细长元件308从解剖结构移除,并且其中胃肠道装置100和缝合线系绳200保持在解剖结构内。
应了解,尽管递送系统700被描绘具有跨胃肠道装置的颈部部分的两个可延伸臂,但是设想递送系统(如递送系统700)包括第二可延伸臂726(例如可定位在胃肠道装置的近侧壁凸缘的近侧的可延伸臂),而不需要第一可延伸臂(例如可定位在胃肠道装置的近侧壁凸缘的近侧的可延伸臂)。在一些此类实例中,递送系统可部分地依赖于在延伸通过胃肠道装置的通腔的定位器胶囊之间的摩擦力,用于在缝合线系绳200递送和展开时维持递送系统的纵向位置。
图25示出在具有多个缝合线系绳200的解剖结构内递送的胃肠道装置100。具体来说,如图20所示,缝合线系绳200位于十二点钟位置、四点钟位置和八点钟位置中的每个。每个缝合线系绳200在十二点钟位置处延伸通过近侧壁凸缘148,通过幽门括约肌26,并且通过远侧壁凸缘150,使得相关联的第一保持突片210位于近侧壁凸缘148的近侧,并且使得相关联的第二保持突片212位于远侧壁凸缘150的远侧。
因此,应了解,使用本文所描述的方法,可将装置(如在图1中示出的胃肠道装置100)经由第二锚定机构紧固到周围解剖结构,以便最小化移位和移动的可能性。在各种实施例中,使用本文所描述的方法,可在不使用手术的情况下,例如在不在患者的身体内形成切口的情况下,从患者移除缝合线系绳200和胃肠道装置100。
应了解,尽管上文讨论的实例关于与幽门结合使用的胃肠道装置说明和描述,但是在不脱离本公开的精神或范围的情况下,本文中所讨论的装置、系统和方法可用于其它解剖区域。因此,上文说明和描述的实例不应解释为限制性的。
在前述描述中已经阐述了许多特征和优点,包括各种替代方案以及装置和/或方法的结构和功能的细节。此外,已大体上和关于具体实例描述本公开在中解决的各种概念的本发明范围。本公开预期仅作为说明性的,并且因此,并旨在是穷举的。举例来说,在医学应用背景下描述本公开的各种实施例,但是还可在非医学应用中适用。所属领域的技术人员将显而易见,可做出各种修改,尤其在本发明原理内的物质结构、材料、元件、部件、形状、大小和部分的布置,包括组合,达到由所附权利要求书所表述的术语的广泛一般含义所指示的完全程度。在这些各种修改并不脱离所附权利要求书的精神和范围的程度下,它们旨在涵盖在其中。
- 用于锚定和限制胃肠道假体的系统和方法
- 用于递送假体瓣膜用锚定装置的部署系统、工具和方法