一种自动化导线布线插值用牵线机构
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及线束生产技术领域,尤其涉及一种自动化导线布线插值用牵线机构。
背景技术
汽车的线束生产时,需要在工装板上完成导线的布线和导线插值(即把导线两端的端子插入连接器中),由于一个线束中通常包含多种导线、多种连接器和对应的端子,这些复杂因素导致线束生产时只能由人工完成,包括人工插值和人工布线,生产效率低。
为此,线束生产自动化是本行业一直以来希望解决的问题,为此,可通过机械手来进行导线的布线和插值,而通过机械手进行导线的布线和插值时,为了保证顺畅地完成布线,要求导线上具有一定的张力,以避免由于松弛而与其它机构缠绕。
发明内容
鉴于上述现有技术的不足之处,本发明的目的在于提供一种自动化导线布线插值用牵线机构,可保证通过机械手来进行导线的布线和插值的过程中,导线上具有一定的张力,避免导线由于松弛而与其它机构缠绕。
为了达到上述目的,本发明采取了以下技术方案:
一种自动化导线布线插值用牵线机构,包括基板,以及设置在所述基板上的固定夹爪、滑动夹爪和驱动装置;
所述滑动夹爪可远离或靠近所述固定夹爪移动,所述驱动装置用于驱动所述滑动夹爪移动;
所述固定夹爪和滑动夹爪分别用于夹住待插值导线的两端;所述滑动夹爪远离所述固定夹爪移动时可拉直所述待插值导线。
所述的自动化导线布线插值用牵线机构中,所述固定夹爪和滑动夹爪均包括第一夹持部和第二夹持部,所述第一夹持部和第二夹持部之间能相互靠近以夹住所述待插值导线的端部,并能相互远离以松开所述待插值导线的端部;
所述第一夹持部和/或第二夹持部上开设有用于供机械手夹爪伸入以取出待插值导线的端部的凹槽。
所述的自动化导线布线插值用牵线机构,还包括设置在所述固定夹爪背向所述滑动夹爪的一侧的导向件,所述导向件用于在所述待插值导线移出所述自动化导线布线插值用牵线机构时,对所述待插值导线进行导向。
一些实施方式中,所述导向件包括一个与所述基板连接的立杆,以及设置在所述立杆上端的U形叉,所述U形叉的开口朝上。
一些实施方式中,所述导向件包括两个导向轮/导向柱,所述两个导向轮/导向柱的轴向垂直于所述基板,且所述两个导向轮/导向柱之间具有供所述待插值导线穿过的间隙。
所述的自动化导线布线插值用牵线机构,还包括设置在所述基板上的导轨和滑动设置在所述导轨上的滑块;所述滑动夹爪设置在所述滑块上。
一些实施方式中,所述驱动装置包括第一伺服电机、同步带、主动同步轮和从动同步轮,所述同步带绕设在所述主动同步轮和从动同步轮之间,所述滑块与所述同步带固定连接。
一些实施方式中,所述驱动装置包括设置在所述滑块上的第二伺服电机、设置在所述基板上的齿条和设置在所述第二伺服电机输出轴上的齿轮,所述齿轮与所述齿条啮合。
所述的自动化导线布线插值用牵线机构中,所述导轨的两端设置有限位挡板。
所述的自动化导线布线插值用牵线机构中,靠近所述固定夹爪的限位挡板上设置有缓冲件。
有益效果:
本发明提供的一种自动化导线布线插值用牵线机构,使用时,用固定夹爪和滑动夹爪夹住待插值导线的两端,然后滑动夹爪远离固定夹爪从而拉直待插值导线,然后固定夹爪松开让机械手从中取出待插值导线的端部并拖动待插值导线进行布线和插值,最后滑动夹爪松开让机械手从中取出待插值导线的端部进行插值,该过程中,由于滑动夹爪的滑动阻力会使待插值导线上具有一定张力,使待插值导线始终处于拉直状态,从而避免导线由于松弛而与其它机构缠绕。
附图说明
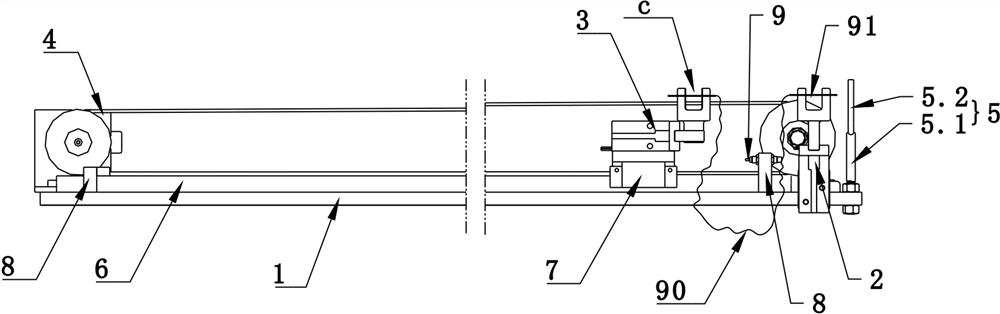
图1为本发明提供的自动化导线布线插值用牵线机构的侧视图。
图2为本发明提供的自动化导线布线插值用牵线机构的俯视图,图中显示的是导线拉直前的状态。
图3为本发明提供的自动化导线布线插值用牵线机构的俯视图,图中显示的是导线拉直后的状态。
图4为本发明提供的自动化导线布线插值用牵线机构的俯视图,图中显示的是插值过程的状态。
图5为图4中S部分的放大图。
图6为一种示例性的阻尼机构的结构示意图。
具体实施方式
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
下文的公开提供的实施方式或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本发明。此外,本发明可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本发明提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
请参阅图1-6,本发明提供的一种自动化导线布线插值用牵线机构,包括基板1,以及设置在基板1上的固定夹爪2、滑动夹爪3和驱动装置4;
滑动夹爪3可远离或靠近固定夹爪2移动,驱动装置4用于驱动滑动夹爪3移动;
固定夹爪2和滑动夹爪3分别用于夹住待插值导线90的两端;滑动夹爪3远离固定夹爪2移动时可拉直待插值导线90。
使用时,用固定夹爪2和滑动夹爪3夹住待插值导线90的两端,例如夹持待插值导线90的端子91,但不限于此(可以人工把导线的两端放入固定夹爪2和滑动夹爪3,也可由上料机器人把导线的两端放入固定夹爪2和滑动夹爪3),此时待插值导线90为松弛状态,如图2所示;然后滑动夹爪3远离固定夹爪2从而拉直待插值导线90,如图3所示;然后固定夹爪2松开让机械手的夹爪92从中取出待插值导线的端部并拖动待插值导线90进行布线和插值,如图4所示;最后滑动夹爪3松开让机械手的夹爪从中取出待插值导线的另一端进行插值,该过程中,由于滑动夹爪3的滑动阻力会使待插值导线90上具有一定张力,使待插值导线90始终处于拉直状态,从而避免导线由于松弛而与其它机构缠绕。
在一些实施方式中,见图1、5,固定夹爪2和滑动夹爪3均包括第一夹持部a和第二夹持部b,第一夹持部a和第二夹持部b之间能相互靠近以夹住待插值导线的端部,并能相互远离以松开待插值导线的端部;
第一夹持部a和/或第二夹持部b上开设有用于供机械手夹爪92伸入以取出待插值导线的端部的凹槽c。
图中画出的是第一夹持部a和第二夹持部b夹持待插值导线的端子91的情况,但实际使用时不限于是夹持端子91。
当机械手需要取出待插值导线的端部时,先把夹爪92伸入凹槽c中夹住待插值导线的端部,然后固定夹爪2或滑动夹爪3才松开待插值导线的端部;因此,固定夹爪2和滑动夹爪3也起到对待插值导线的端部的定位作用,以便机械手从预设位置取出待插值导线的端部。
在一些实施方式中,见图5,第一夹持部a朝向第二夹持部b的侧面上间隔设置有两个凸起部d,当第一夹持部a和第二夹持部b之间相互靠近时,由该两个凸起部d与第二夹持部b配合夹住待插值导线的端部;从而使待插值导线的端部与第一夹持部a之间具有间隙e,更方便机械手夹爪92夹取待插值导线的端部。
其中,固定夹爪2和滑动夹爪3可以是气动夹爪、电动夹爪、液压夹爪等,但不限于此。
优选的,见图1-4,该自动化导线布线插值用牵线机构,还包括设置在固定夹爪2背向滑动夹爪3的一侧的导向件5,该导向件5用于在待插值导线90移出自动化导线布线插值用牵线机构时,对待插值导线90进行导向。见图4,当机械手拖动待插值导线90进行布线时,待插值导线90的方向会发生偏转,若不设置导向件5,则导线会与固定夹爪2发生刮擦,容易损坏导线,此处设置导向件5,可保证导向件5与滑动夹爪3之间的一段导线的方向不会发生变化或变化很小,从而避免与固定夹爪2发生刮擦。
在一些实施方式中,导向件5包括一个与基板连接的立杆5.1,以及设置在立杆上端的U形叉5.2,U形叉的开口朝上(参考图1、2)。机械手从固定夹爪2取出待插值导线的端部后,直接拖动待插值导线90穿过U形叉5.2后再改变方向进行布线。在另一些实施方式中,导向件5包括两个导向轮/导向柱,两个导向轮/导向柱的轴向垂直于基板,且两个导向轮/导向柱之间具有供待插值导线穿过的间隙。导向件5的结构不限于。
在一些优选实施方式中,该自动化导线布线插值用牵线机构,还包括设置在基板1上的导轨6和滑动设置在导轨上的滑块7;滑动夹爪3设置在滑块7上。通过导轨6的导向作用,保证滑动夹爪3始终在同一直线上运动。
其中,驱动装置4可以是同步带驱动装置、齿条驱动装置、链条驱动装置、皮带驱动装置等。
例如,在一些实施方式中,见图1-4,驱动装置4包括第一伺服电机4.1、同步带4.2、主动同步轮4.3和从动同步轮4.4,同步带4.2绕设在主动同步轮4.3和从动同步轮4.4之间,滑块7与同步带4.2固定连接。当进行待插值导线90的拉直时,由同步带4.2带动滑块7远离固定夹爪2,当机械手拖动待插值导线90进行插值时,第一伺服电机4.1空转,使待插值导线90能够拖动滑块7。其中,同步带4.2可替换为皮带,从而主动同步轮4.3和从动同步轮4.4替换为主动皮带轮和从动皮带轮;同步带4.2还可替换为链条,从而主动同步轮4.3和从动同步轮4.4替换为主动链轮和从动链轮。
又例如,在另一些实施方式中,驱动装置4包括设置在滑块上的第二伺服电机、设置在基板上的齿条和设置在第二伺服电机输出轴上的齿轮,齿轮与齿条啮合。当进行待插值导线90的拉直时,第二伺服电机转动带动滑块7远离固定夹爪2,当机械手拖动待插值导线90进行插值时,第二伺服电机空转,使待插值导线90能够拖动滑块7。
优选的,导轨6的两端设置有限位挡板8。以避免滑块7从两端脱离导轨6。
进一步的,靠近固定夹爪2的限位挡板8上设置有缓冲件9,避免滑块7直接撞击限位挡板8而导致设备受损。该缓冲件9可以但不限于是弹簧、橡胶块、硅胶块、缓冲气囊、缓冲器等。
优选的,还可在驱动装置4的伺服电机(第一伺服电机4.1或第二伺服电机)上设置旋转编码器11,以测量滑块7的移动距离,以便在滑块7接近限位挡板8时进行减速。
此外,为了提高滑块7移动的阻尼,使机械手拖动待插值导线90进行插值时,待插值导线90上的张力更大,可在滑块7上设置阻尼机构10,例如图6中的阻尼机构10,设置在滑块7上开设的安装孔7.1中,包括摩擦块10.1、与安装孔7.1螺纹连接的调节螺丝10.3、以及连接在摩擦块10.1和调节螺丝10.3之间的压缩弹簧10.2,摩擦块10.1与导轨6相抵。通过调节螺丝10.3可调节摩擦块10.1的压力,从而调节摩擦块10.1与导轨6之间的摩擦力,从而可根据需要调节阻尼,其中压缩弹簧10.2可保证摩擦块10.1磨损后仍然能够可靠地压在导轨6上。
综上所述,虽然本发明已以优选实施例揭露如上,但上述优选实施例并非用以限制本发明,本领域的普通技术人员,在不脱离本发明的精神和范围内,均可作各种更动与润饰,其方案与本发明实质上相同。
- 一种自动化导线布线插值用牵线机构
- 一种自动化导线布线插值用牵线机构