扫描探针显微镜以及扫描探针显微镜的控制装置
文献发布时间:2023-06-19 10:08:35
技术领域
本发明涉及一种扫描探针显微镜以及扫描探针显微镜的控制装置。
背景技术
在扫描探针显微镜中使用被称为悬臂的、形成有探针的悬臂梁。将悬臂的弯曲或振动的变化变换为照射到悬臂背面的激光的反射光的变化并由光电检测器检测。通过光电检测器检测反射光的位置、强度和相位等的变化,并将它们变换为各种物理信息(例如,参照专利文献1(日本特开2000-346782号公报))。
在扫描探针显微镜中,使用激光的反射光,因此,在测量之前,需要调整激光的光轴,以向悬臂背面准确地照射激光。由于悬臂较小,因此调整的公差是亚微米级。通过手动方式进行光轴调整是困难的,且花费时间,因此,使调整自动化的扫描探针显微镜逐渐增多。
在光轴自动调整中,通过光学显微镜或CCD(Charge Coupled Device:电荷耦合元件)摄影部等观察悬臂和激光光束的光斑,使光学部件、激光光源或悬臂自动移动,使得光束的光斑向悬臂的背面照射。
专利文献1:日本特开2000-346782号公报
发明内容
然而,在激光光束的光斑处于无法被光学显微镜或CCD摄影部检测的位置的情况下,由于无法确定移动对象和移动方向,因此无法自动调整光轴。
还能够切换为手动模式来进行调整,但是,由于不知晓光束的光斑的位置,因此必须随机移动激光光源并且从确定出移动对象的位置开始调整,作业繁杂化,并且非高效化。
因此,本发明的目的在于提供一种能够容易地调整光轴的扫描探针显微镜以及扫描探针显微镜的控制装置。
本发明的某个方面的扫描探针显微镜具备:悬臂,所述悬臂的顶端部具有探针;光学系统,其向悬臂照射激光,检测被悬臂反射的激光;测量部,其基于根据由光学系统检测到的激光的位置的变化而获得的悬臂的位移,来测量试样的特性;激光调整部,其在调整激光的光轴时使激光的光斑直径大于测量试样的特性时的光斑直径;摄影部,其用于在调整激光的光轴时拍摄包括探针的位置的范围;以及显示部,其显示由摄影部生成的图像。
由此,在调整激光的光轴时,使激光的光斑直径大于测量试样时的激光的光斑直径,因此,增加能够在摄影图像内捕捉到激光的光斑的概率。其结果是,用户能够一边观察摄影图像一边调整激光的光轴。
本发明的另一方面的扫描探针显微镜具备:悬臂,所述悬臂的顶端部具有探针;光学系统,其向悬臂照射激光,检测被悬臂反射的激光;测量部,其基于根据由光学系统检测到的激光的位置的变化而获得的悬臂的位移,来测量试样的特性;激光调整部,其在调整激光的光轴时使激光的光斑直径大于测量试样的特性时的光斑直径;摄影部,其用于在调整激光的光轴时拍摄包括探针的位置的范围;图像处理部,其在由摄影部生成的图像中确定激光的光斑的一部分或全部的位置;以及光轴调整部,其基于所确定的位置来调整激光的光轴。
由此,在调整激光的光轴时使激光的光斑直径大于测量试样时的激光的光斑直径,因此,能够通过对摄影图像进行图像处理来在摄影图像内确定激光的光斑位置。能够基于所确定的激光的光斑位置来自动调整激光的光轴。
优选的是,光学系统包括:光源,其辐射激光;光检测器,其检测激光;第一反射镜,其使从光源射出的激光向悬臂的方向反射;以及第二反射镜,其使被悬臂反射的激光向光检测器的方向反射。
由此,在光学系统包括光源、光检测器、第一反射镜以及第二反射镜的结构中,能够自动调整激光的光源。
优选的是,光轴调整部基于所确定的位置来使光源的位置移动,由此调整激光的光轴。
由此,仅通过改变光源的位置就能够自动调整激光的光轴。
优选的是,光轴调整部基于所确定的位置来使悬臂的位置移动,由此调整激光的光轴。
由此,仅通过改变悬臂的位置就能够自动调整激光的光轴。
优选的是,光轴调整部基于所确定的位置来使第一反射镜的位置移动,由此调整激光的光轴。
由此,仅通过改变使激光反射的第一反射镜的位置就能够自动调整激光的光轴。
优选的是,激光调整部在调整激光的光轴时使激光的强度为能够由摄影部检测的灵敏度极限以上。
由此,能够防止激光光束的光斑过大而激光的强度小于能够识别的灵敏度。
优选的是,光轴调整部对激光的光轴进行调整,使得在图像中激光的光斑的中心的位置与悬臂的顶端的位置一致。
由此,向安装有探针的悬臂的顶端照射激光,因此,能够在测量时基于试样的特性来准确地检测悬臂的位移。
优选的是,在调整后,激光调整部还使激光的光斑直径与测量试样的特性时的光斑直径相同,并且,光轴调整部对激光的光轴进行调整,使得在图像中被缩小后的激光的光斑的中心的位置与悬臂的顶端的位置一致。
由此,能够精密地调整激光的光轴。
优选的是,图像处理部在图像内基于像素的颜色来确定激光的光斑的一部分或全部的位置。
由此,通过从图像找出激光的光斑的颜色的像素,能够确定激光的光斑的位置。
本发明的某个方面的扫描探针显微镜的控制装置控制扫描探针显微镜。扫描探针显微镜具备:悬臂,所述悬臂的顶端部具有探针;光学系统,其向悬臂照射激光,检测被悬臂反射的激光;测量部,其基于根据由光学系统检测到的激光的位置的变化而获得的悬臂的位移,来测量试样的特性;以及摄影部,其用于在调整激光的光轴时拍摄包括探针的位置的范围。控制装置具备:激光调整部,其在调整激光的光轴时使激光的光斑直径大于测量试样的特性时的光斑直径;图像处理部,其在由摄影部生成的图像中确定激光的光斑的一部分或全部的位置;以及光轴调整部,其基于所确定的位置来调整激光的光轴。
由此,在调整激光的光轴时,使激光的光斑直径大于测量试样时的激光的光斑直径,因此,能够通过对摄影图像进行图像处理来在摄影图像内确定激光的光斑位置。能够基于所确定的激光的光斑位置来自动调整激光的光轴。
根据本发明,能够容易地调整光轴。
附图说明
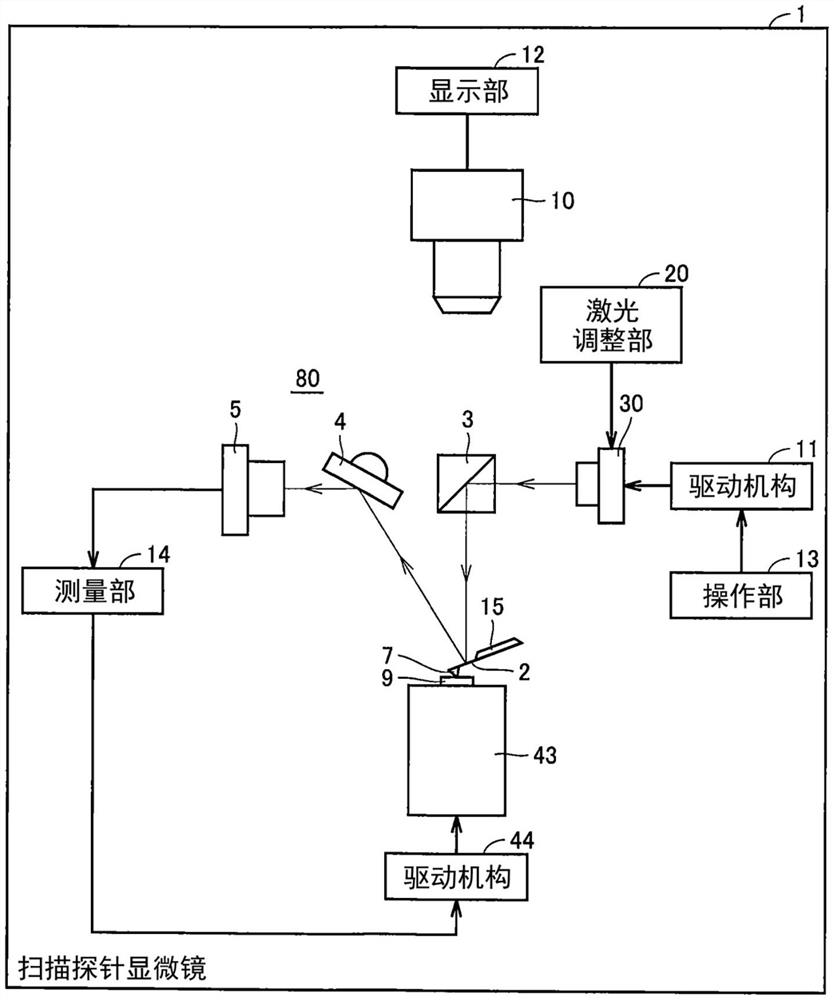
图1是表示第一实施方式的扫描探针显微镜1的结构的图。
图2是表示探针7、悬臂2以及支架15的图。
图3是表示以往的调整激光的光轴时的激光光源30的光束的光斑SP的例子的图。
图4是表示以往的调整激光的光轴时的激光光源30的光束的光斑SP的另一例的图。
图5是表示激光光束的光斑直径与激光的强度之间的关系的图。
图6是表示第一方式的调整激光的光轴时的激光光束的光斑SP的例子的图。
图7是表示第一实施方式的激光的光轴调整过程的流程图。
图8是表示第二实施方式的扫描探针显微镜71的结构的图。
图9是表示第二实施方式的激光的光轴调整过程的流程图。
图10是表示在第一实施方式中激光的光斑直径为D1时的摄影图像的例子的图。
图11是表示对激光的光轴进行精密调节后的摄影图像的例子的图。
图12是表示第三实施方式的扫描探针显微镜51的结构的图。
图13是表示第三实施方式的激光的光轴调整过程的流程图。
图14是表示第四实施方式的扫描探针显微镜61的结构的图。
图15是表示第四实施方式的激光的光轴调整过程的流程图。
图16是表示第五实施方式的测量系统的结构的图。
图17是表示悬臂2的形状的例子的图。
图18是表示悬臂2的形状的另一例的图。
图19是表示图像处理部72和光轴调整部73的硬件结构的例子的图。
具体实施方式
下面,参照附图来对实施方式进行说明。
[第一实施方式]
图1是表示第一实施方式的扫描探针显微镜1的结构的图。
第一实施方式的扫描探针显微镜1具备:摄影部10、显示部12、光学系统80、悬臂2、测量部14、驱动机构44、扫描仪43、激光调整部20、驱动机构11以及操作部13。
悬臂2的作为表面的自由端部的顶端具有探针7。试样9与探针7相对配置。悬臂2由于探针7与试样9之间的原子间力(引力或斥力)而进行位移。试样9载置在扫描仪43上。
光学系统80向悬臂2的背面照射激光,检测被悬臂2的背面反射的激光。光学系统80能够检测悬臂2的挠曲。光学系统80具备:激光光源30、作为第一反射镜的分束器3、作为第二反射镜的反射镜4、以及光检测器5。激光光源30由发射激光的激光振荡器等构成。光检测器5由检测入射的激光的光电二极管等构成。从激光光源30发射的激光被分束器3反射,而入射到悬臂2。激光被悬臂2反射,再被反射镜4反射,从而入射到光检测器5。通过光检测器5检测激光,能够测量悬臂2的位移。
激光调整部20通过调整激光光源30的激光的焦点的位置来调整激光光源30的激光光束的光斑直径。激光调整部20在调整激光的光轴时使激光的光斑直径大于测量试样9的特性时的光斑直径。
驱动机构11通过改变激光光源30的位置来调整激光的光轴。
操作部13接收来自用户的驱动机构11的操作。
测量部14基于根据由光学系统80检测到的激光的位置的变化而获得的悬臂2的位移,来测量试样9的特性。例如,测量部14根据悬臂2的位移随时间的变化来制作表示作用力(力)随时间的变化的力曲线等。测量部14向驱动机构44发送用于驱动扫描仪43的控制信号。
驱动机构44通过驱动扫描仪43来改变载置在扫描仪43上的试样9与探针7之间的相对位置关系。
摄影部10在调整激光的光轴时拍摄包括探针7的位置的范围。摄影部10由光学显微镜、CCD摄像机、CMOS(Complementary Metal Oxide Semiconductor:互补金属氧化物半导体)摄像机等构成。
显示部12显示由摄影部10生成的摄影图像。显示部12由液晶显示器等构成。
图2是表示探针7、悬臂2以及支架15的图。如图2所示,探针7安装在悬臂2的顶端。支架15是用于支承悬臂2的构件。
图3是表示以往的调整激光的光轴时的激光光源30的光束的光斑SP的例子的图。在图3的例子中,在调整光轴时使激光光源30的光束的光斑直径与实际使用时的光斑直径D2相同的情况下,摄影图像IMG中包括光束的光斑SP。
图4是表示以往的调整激光的光轴时的激光光源30的光束的光斑SP的另一例的图。在图4的例子中,在调整光轴时使激光光源30的光束的光斑直径与实际使用时的光斑直径D2相同的情况下,摄影图像IMG中不包括光束的光斑SP。由于光束的光斑直径小,因此产生摄影图像IMG中包括光束的光斑SP的情况和摄影图像IMG中不包括光束的光斑SP的情况。
图5是表示激光光束的光斑直径与激光的强度之间的关系的图。
如图5所示,使光束的光斑直径越大,激光的强度下降得越多。在本实施方式中,在激光的强度高于摄影部10的灵敏度极限这样的条件下,尽可能大地设定调整光轴时的激光的光斑直径D1。
图6是表示第一方式的调整激光的光轴时的激光光束的光斑SP的例子的图。在图6的例子中,通过在调整光轴时设定为比实际使用时的激光光源30的激光光束的光斑直径D2大的光斑直径D1,由此光束的光斑SP包括在摄影图像IMG中。
图7是表示第一实施方式的激光的光轴调整过程的流程图。该光轴调整例如在更换悬臂2时和在测量试样9的物理性质之前实施。
在步骤S101中,激光调整部20将激光的光斑直径调整为D1。
在步骤S102中,激光光源30辐射激光。
在步骤S103中,摄影部10在调整激光的光轴时开始拍摄包括探针7的位置的范围。
在步骤S104中,显示部12开始显示由摄影部10生成的摄影图像。
在步骤S105中,驱动机构11通过操作部13接受来自用户的指示,通过改变激光光源30的位置来调整激光的光轴。
如上面那样,根据本实施方式,在调整激光的光轴时,使激光的光斑直径大于测量试样时的激光的光斑直径,因此,增加能够在摄影图像内捕捉到激光的光斑的概率。其结果是,用户能够一边观察摄影图像一边调整激光的光轴。
[第二实施方式]
图8是表示第二实施方式的扫描探针显微镜71的结构的图。
第二实施方式的扫描探针显微镜71与第一实施方式的扫描探针显微镜1不同之处在于,第二实施方式的扫描探针显微镜71具备图像处理部72和光轴调整部73来代替操作部13。
图像处理部72基于从摄影部10输出的摄影图像来确定激光的光斑SP的一部分或全部的位置。例如,图像处理部72能够将摄影图像中的白色的像素的区域确定为激光的光斑SP的一部分或全部的位置,该白色是激光的光斑SP的颜色。
光轴调整部73通过基于由图像处理部72确定的激光的光斑SP的一部分或全部的位置控制驱动机构11,来改变激光光源30的位置,由此调整光轴。
图9是表示第二实施方式的激光的光轴调整过程的流程图。该光轴调整例如在更换悬臂2时和在测量试样9的物理性质之前实施。
在步骤S401中,激光调整部20将激光的光斑直径调整为D1。
在步骤S402中,激光光源30辐射激光。
在步骤S403中,摄影部10在调整激光的光轴时开始拍摄包括探针7的位置的范围。
在步骤S404中,基于从摄影部10输出的摄影图像,来确定激光的光斑SP的一部分或全部的位置。图10是表示在第一实施方式中激光的光斑直径为D1时的摄影图像的例子的图。由于光斑直径D1较大,因此光斑SP包括在摄影图像中的盖然性变高。
在步骤S405中,光轴调整部73输出用于以使光斑直径D1的激光的光斑SP的中心的位置与安装有探针7的悬臂2的顶端的位置一致的方式控制驱动机构11的控制信号。驱动机构11按照控制信号来改变激光光源30的位置,由此调整激光的光轴。在此,由于激光的光斑直径较大,因此激光的光轴被粗略地调整。
在步骤S406中,激光调整部20将激光的光斑直径调整为D2。
在步骤S407中,基于从摄影部10输出的摄影图像,来确定激光的光斑SP的位置。
在步骤S408中,光轴调整部73输出用于以使光斑直径D2的激光的光斑SP的中心的位置与安装有探针7的悬臂2的顶端的位置一致的方式控制驱动机构11的控制信号。驱动机构11按照控制信号来改变激光光源30的位置,由此调整激光的光轴。在此,由于激光的光斑直径较小,因此激光的光轴被精密地调整。图11是表示对激光的光轴进行精密调节后的摄影图像的例子的图。根据本实施方式,能够准确地调整激光的光轴。
如上面那样,根据本实施方式,在调整激光的光轴时使激光的光斑直径大于测量试样时的激光的光斑直径,因此能够通过对摄影图像进行图像处理来在摄影图像内确定激光的光斑位置。基于所确定的激光的光斑位置来使激光光源30的位置自动移动,由此能够自动调整激光的光轴。
[第三实施方式]
图12是表示第三实施方式的扫描探针显微镜51的结构的图。
第三实施方式的扫描探针显微镜51与第一实施方式的扫描探针显微镜1不同之处在于,第三实施方式的扫描探针显微镜51具备图像处理部72、光轴调整部53以及驱动机构52来代替操作部13。
图像处理部72基于从摄影部10输出的摄影图像,来确定激光的光斑SP的一部分或全部的位置。
光轴调整部53通过基于由图像处理部72确定的激光的光斑SP的一部分或全部的位置控制驱动机构52,来改变支承悬臂2的支架15的位置,由此调整光轴。
驱动机构52通过改变支架15的位置来调整激光的光轴。
图13是表示第三实施方式的激光的光轴调整过程的流程图。该光轴调整例如在更换悬臂2时和在测量试样9的物理性质之前实施。
在步骤S201中,激光调整部20将激光的光斑直径调整为D1。
在步骤S202中,激光光源30辐射激光。
在步骤S203中,摄影部10在调整激光的光轴时开始拍摄包括探针7的位置的范围。
在步骤S204中,基于从摄影部10输出的摄影图像,来确定激光的光斑SP的一部分或全部的位置。
在步骤S205中,光轴调整部53输出用于以使光斑直径D1的激光的光斑SP的中心的位置与安装有探针7的悬臂2的顶端的位置一致的方式控制驱动机构52的控制信号。驱动机构52按照控制信号来改变支架15的位置,由此调整激光的光轴。在此,由于激光的光斑直径较大,因此激光的光轴被粗略地调整。
在步骤S206中,激光调整部20将激光的光斑直径调整为D2。
在步骤S207中,基于从摄影部10输出的摄影图像,来确定激光的光斑SP的位置。
在步骤S208中,光轴调整部73输出用于以使光斑直径D2的激光的光斑SP的中心的位置与安装有探针7的悬臂2的顶端的位置一致的方式控制驱动机构52的控制信号。驱动机构52按照控制信号来改变支架15的位置,由此调整激光的光轴。在此,由于激光的光斑直径较小,因此激光的光轴被精密地调整。
如上面那样,根据本实施方式,在调整激光的光轴时使激光的光斑直径大于测量试样时的激光的光斑直径,因此,能够通过对摄影图像进行图像处理来在摄影图像中确定激光的光斑位置。基于所确定的激光的光斑位置来使支承悬臂2的支架15的位置自动移动,由此能够自动调整激光的光轴。
[第四实施方式]
图14是表示第四实施方式的扫描探针显微镜61的结构的图。
第四实施方式的扫描探针显微镜61与第一实施方式的扫描探针显微镜1不同之处在于,第四实施方式的扫描探针显微镜61具备图像处理部72、光轴调整部63以及驱动机构62来代替操作部13。
图像处理部72基于从摄影部10输出的摄影图像,来确定激光的光斑SP的一部分或全部的位置。
光轴调整部63通过基于由图像处理部72确定的激光的光斑SP的一部分或全部的位置控制驱动机构62,来改变分束器3的位置,由此调整光轴。
驱动机构62通过改变分束器3的位置来调整激光的光轴。
图15是表示第四实施方式的激光的光轴调整过程的流程图。该光轴调整例如在更换悬臂2时和在测量试样9的物理性质之前实施。
在步骤S301中,激光调整部20将激光的光斑直径调整为D1。
在步骤S302中,激光光源30辐射激光。
在步骤S303中,摄影部10在调整激光的光轴时开始拍摄包括探针7的位置的范围。
在步骤S304中,基于从摄影部10输出的摄影图像,来确定激光的光斑SP的一部分或全部的位置。
在步骤S305中,光轴调整部53输出用于以使光斑直径D1的激光的光斑SP的中心的位置与安装有探针7的悬臂2的顶端的位置一致的方式控制驱动机构62的控制信号。驱动机构62按照控制信号来改变分束器3的位置,由此调整激光的光轴。在此,由于激光的光斑直径较大,因此激光的光轴被粗略地调整。
在步骤S306中,激光调整部20将激光的光斑直径调整为D2。
在步骤S307中,基于从摄影部10输出的摄影图像,来确定激光的光斑SP的位置。
在步骤S308中,光轴调整部73输出用于以使光斑直径D2的激光的光斑SP的中心的位置与安装有探针7的悬臂2的顶端的位置一致的方式控制驱动机构62的控制信号。驱动机构62按照控制信号来改变分束器3的位置,由此调整激光的光轴。在此,由于激光的光斑直径较小,因此激光的光轴被精密地调整。
如上面那样,根据本实施方式,在调整激光的光轴时使激光的光斑直径大于测量试样时的激光的光斑直径,因此,能够通过对摄影图像进行图像处理来在摄影图像中确定激光的光斑位置。基于所确定的激光的光斑位置来使对激光进行反射的分束器3的位置自动移动,由此能够自动调整激光的光轴。
[第五实施方式]
在本实施方式中,将第二实施方式的扫描探针显微镜中的控制功能设置在与扫描探针显微镜分开设置的控制装置中。
图16是表示第五实施方式的测量系统的结构的图。
测量系统具备:扫描探针显微镜81;以及控制装置82,其控制扫描探针显微镜81。
扫描探针显微镜81具备第二实施方式的扫描探针显微镜71的全部结构要素中的、除了激光调整部20、图像处理部72以及光轴调整部73以外的结构要素。
控制装置82具备激光调整部20、图像处理部72以及光轴调整部73。
在本实施方式中,即使将第二实施方式的扫描探针显微镜中的控制功能设置在与扫描探针显微镜分开设置的控制装置中,也能够获得与第二实施方式同样的效果。
此外,即使将第一实施方式、第三实施方式或第四实施方式的扫描探针显微镜中的控制功能设置在与扫描探针显微镜分开设置的控制装置中,也能够获得与第一实施方式、第三实施方式或第四实施方式同样的效果。
[变形例]
本发明并不限定于上述的实施方式,例如还包括下面那样的变形例。
(1)悬臂的形状
图17是表示悬臂2的形状的例子的图。图18是表示悬臂2的形状的另一例的图。在任何情况下,悬臂2的顶端均设置有探针7。在测量试样的物理性质时,调整激光的光轴,使得光斑直径D2的激光的光斑SP来到悬臂2的设置有探针7的顶端附近。
(2)图像处理部和光轴调整部
图19是表示图像处理部72和光轴调整部73的硬件结构的例子的图。图8的图像处理部72和光轴调整部73的硬件具备:处理器1100;以及存储器1200,其通过总线1300与处理器1100连接。
CPU(Central Processing Unit:中央处理单元)等处理器1100执行存储器1200中存储的程序,由此实现图像处理部72和光轴调整部73。另外,也可以设为多个处理器和多个存储器协作来执行上述结构要素的功能。图12的图像处理部72及光轴调整部53、图14的图像处理部72及光轴调整部63、图16的图像处理部72及光轴调整部73也同样如此。
此次公开的实施方式应该认为在全部的方面均是例示性的,而不是限制性的。本发明的范围并非由上述的说明来表示,而是由权利要求书来表示,意在包括与权利要求书均等的意思和范围内的全部变更。
1、51、61、71、81:扫描探针显微镜;2:悬臂;3:分束器;4:反射镜;5:光检测器;7:探针;9:试样;10:摄影部;11、44、52、62:驱动机构;12:显示部;13:操作部;14:测量部;15:支架;20:激光调整部;30:激光光源;43:扫描仪;72:图像处理部;53、63、73:光轴调整部;80:光学系统;82:控制装置。
- 使用离子束制造扫描探针显微镜和临界尺寸扫描探针显微镜纳米针探针的方法与由其制造的扫描探针显微镜和临界尺寸扫描探针显微镜纳米针探针
- 扫描探针显微镜和扫描探针显微镜的光轴调整方法