一种磁悬浮式镍合金管裂缝检测装置
文献发布时间:2023-06-19 10:11:51
技术领域
本发明涉及一种镍合金领域,尤其涉及一种磁悬浮式镍合金管裂缝检测装置。
背景技术
在对镍合金管进行坡口焊之前,需要对镍合金管的管体以及坡口进行PT检测,现有的对管体内壁的PT检测通常为伸入式检测,在对内管壁进行查看时极为不便,并且无法检测出裂缝的延伸结构,致使检测的效果低下,无法得出有效数据,同时单次数据检测,会导致裂缝的定位失准。
结合上述问题,急需一种磁悬浮式镍合金管裂缝检测装置,来解决上述问题。
发明内容
为了克服在对镍合金管进行坡口焊之前,需要对镍合金管的管体以及坡口进行PT检测,现有的对管体内壁的PT检测通常为伸入式检测,在对内管壁进行查看时极为不便,并且无法检测出裂缝的延伸结构,致使检测的效果低下,无法得出有效数据,同时单次数据检测,会导致裂缝的定位失准的缺点,本发明要解决的技术问题是:提供一种磁悬浮式镍合金管裂缝检测装置。
本发明的技术方案为:一种磁悬浮式镍合金管裂缝检测装置,包括有:
第一支撑框架;
第二支撑框架,第二支撑框架与第一支撑框架进行固接,第二支撑框架与磁悬浮检测系统相连接;
磁悬浮检测系统,磁悬浮检测系统与第一支撑框架相连接,磁悬浮检测系统与裂缝修复系统相连接;
管体固定系统,管体固定系统与裂缝修复系统相连接,管体固定系统与第一支撑框架相连接;
裂缝修复系统,裂缝修复系统与第二支撑框架相连接;
实时控制屏,实时控制屏与第一支撑框架相连接。
作为本发明的一种优选技术方案,磁悬浮检测系统包括有:
第二平齿轮;
第三平齿轮;
第一连接板;
第三衔接板;
齿环;
第一探测头;
第二探测头;
第二传动轮,第二传动轮与裂缝修复系统相连接;
第一轴杆,第一轴杆外表面依次与第一传动轮、第二传动轮和第一锥齿轮进行固接,第一轴杆与第一支撑框架进行转动连接,第一轴杆与第二支撑框架进行转动连接;
第一传动轮,第一传动轮外环面通过皮带与第三传动轮进行传动连接;
第三传动轮,第三传动轮与第二轴杆进行固接;
第二轴杆,第二轴杆与第一花键轴进行固接,第二轴杆与第二支撑框架进行转动连接;
第一花键轴,第一花键轴与第一传动套进行传动连接,第一花键轴与第二支撑框架进行转动连接;
第一传动套,第一传动套与第一平齿轮进行固接,第一传动套与U型板进行转动连接;
第一平齿轮,第一平齿轮下方一侧设置有第二平齿轮,第一平齿轮下方另一侧设置有第三平齿轮;
U型板,U型板与推块进行固接;
推块,推块与第一电动推杆相连接;
第一电动推杆,第一电动推杆与第二支撑框架进行固接;
连接架,连接架通过转轴与第四传动轮和第二平齿轮进行转动连接,连接架通过转轴与第五传动轮和第三平齿轮进行转动连接,连接架与第二支撑框架进行固接;
第四传动轮,第四传动轮通过转轴与第二平齿轮进行固接,第四传动轮外环面通过皮带与第七传动轮进行传动连接;
第五传动轮,第五传动轮通过转轴与第三平齿轮进行固接,第五传动轮外环面通过皮带与第六传动轮进行传动连接;
第六传动轮,第六传动轮与第一丝杆进行固接;
第七传动轮,第七传动轮与第二花键轴进行固接;
第一丝杆,第一丝杆依次与第一连接板和第二连接板进行旋接,第一丝杆与第一支撑框架进行转动连接,第一丝杆与第二支撑框架进行转动连接;
第二花键轴,第二花键轴依次与第一连接板和第二连接板进行转动连接,第二花键轴与第一支撑框架进行转动连接,第二花键轴与第二支撑框架进行转动连接;
第二连接板,第二连接板通过轴承套与第四平齿轮进行转动连接;
第四平齿轮,第四平齿轮下方与齿环相互啮合;
第一衔接板,第一衔接板上方依次与第一连接板和第二连接板进行固接;
第二衔接板,第二衔接板后方一侧通过螺母与第一衔接板进行螺栓连接,第二衔接板后方另一侧通过螺母与第三衔接板进行螺栓连接;
第一承接环,第一承接环上方与第一衔接板进行固接,第一承接环下方与第三衔接板进行固接,第一承接环与转动圆环相连接;
第二承接环,第二承接环依次与第一磁铁和第二磁铁进行固接,第二承接环与齿环进行固接;
第一磁铁,第一磁铁上方设置有第三磁铁;
第二磁铁,第二磁铁下方设置有第一探测头和第二探测头;
转动圆环,转动圆环依次与第一磁铁和第二磁铁进行固接;
第三磁铁,第三磁铁上表面依次设置有第一探测头和第二探测头;
第一锥齿轮,第一锥齿轮与第二锥齿轮相互啮合;
第二锥齿轮,第二锥齿轮与第三轴杆进行固接;
第三轴杆,第三轴杆与第一支撑框架进行转动连接,第三轴杆与毛刷进行固接;
毛刷,毛刷侧面设置有喷头;
喷头,喷头与第一支撑框架相连接。
作为本发明的一种优选技术方案,管体固定系统包括有:
第一传动块;
第二传动块;
第一滑套;
第二滑套;
第三滑套;
第四滑套;
第一弧板;
第二弧板;
第三弧板;
第四弧板;
第一侧板,第一侧板下方一侧与第一支撑框架进行固接,第一侧板下方另一侧与裂缝修复系统相连接;
第三锥齿轮,第三锥齿轮与第二丝杆进行固接;
第二丝杆,第二丝杆依次与第一传动块和第二传动块进行旋接,第二丝杆外表面一侧与第一侧板进行转动连接,第二丝杆外表面另一侧与第二侧板进行转动连接;
第一滑杆,第一滑杆外表面依次与第一滑套和第二滑套进行滑动连接,第一滑杆一侧与第一侧板进行固接,第一滑杆另一侧与第二侧板进行固接;
第二滑杆,第二滑杆外表面依次与第三滑套和第四滑套进行滑动连接,第二滑杆一侧与第一侧板进行固接,第二滑杆另一侧与第二侧板进行固接;
第一固定座,第一固定座下方依次与第一滑套、第一传动块和第三滑套进行固接,第一固定座上方两侧分别通过螺母与第一连接块和第二连接块进行螺栓连接;
第一连接块,第一连接块与第一弧板进行固接;
第二连接块,第二连接块与第二弧板进行固接;
第二固定座,第二固定座下方依次与第二滑套、第二传动块和第四滑套进行固接,第二固定座上方两侧分别通过螺母与第三连接块和第四连接块进行螺栓连接;
第三连接块,第三连接块与第三弧板进行固接;
第四连接块,第四连接块与第四弧板进行固接;
第二侧板,第二侧板下方一侧与第一支撑框架进行固接,第二侧板下方另一侧与裂缝修复系统相连接。
作为本发明的一种优选技术方案,裂缝修复系统包括有:
第九传动轮;
第四锥齿轮;
第一连接杆;
第二连接杆;
压块;
加热架;
固定架,固定架与第一侧板进行固接,固定架与第二侧板进行固接,固定架与第二支撑框架进行固接;
动力电机,动力电机通过螺母与固定架进行螺栓连接,动力电机输出轴与第八传动轮进行固接;
第八传动轮,第八传动轮外环面通过皮带与第九传动轮进行传动连接;
第十传动轮,第十传动轮外环面通过皮带与第二传动轮进行传动连接;
第四轴杆,第四轴杆外表面依次与第九传动轮和第十传动轮进行固接,第四轴杆侧面与第三花键轴进行固接,第四轴杆与第二支撑框架进行转动连接;
第三花键轴,第三花键轴与第二传动套进行传动连接;
第二传动套,第二传动套外表面两侧分别与第四锥齿轮和第五锥齿轮进行固接,第二传动套依次与第一连接杆和第二连接杆进行转动连接;
第五锥齿轮,第五锥齿轮右侧上方设置有第六锥齿轮;
连接滑板,连接滑板上方依次与第一连接杆和第二连接杆进行固接,连接滑板与限位滑条进行滑动连接,连接滑板与第二电动推杆相连接;
限位滑条,限位滑条与固定架进行固接;
第二电动推杆,第二电动推杆与固定架进行固接;
第六锥齿轮,第六锥齿轮与第三丝杆进行固接;
第三丝杆,第三丝杆与承接板进行旋接,第三丝杆上方与第三侧板进行转动连接,第三丝杆下方与第四侧板进行转动连接;
承接板,承接板与第三滑杆进行滑动连接,承接板与压块进行固接,承接板与加热架进行固接;
第三滑杆,第三滑杆上方与第三侧板进行固接,第三滑杆下方与第四侧板进行固接;
第三侧板,第三侧板与第二支撑框架进行固接;
第四侧板,第四侧板与第二支撑框架进行固接。
作为本发明的一种优选技术方案,毛刷为X字型。
作为本发明的一种优选技术方案,第二磁铁和第三磁铁的相对面为异名磁极,第一磁铁和第三磁铁的相对面为异名磁极。
作为本发明的一种优选技术方案,压块下表面为弯弧面。
作为本发明的一种优选技术方案,加热架为“士”字型。
有益效果:1、为解决在对镍合金管进行坡口焊之前,需要对镍合金管的管体以及坡口进行PT检测,现有的对管体内壁的PT检测通常为伸入式检测,在对内管壁进行查看时极为不便,并且无法检测出裂缝的延伸结构,致使检测的效果低下,无法得出有效数据,同时单次数据检测,会导致裂缝的定位失准的问题;
2、设计了磁悬浮检测系统、管体固定系统和裂缝修复系统,使用时通过首先人工将镍合金管放入磁悬浮检测系统内,通过磁悬浮检测系统对镍合金管进行坡口清扫以及着色剂喷涂,然后人工将镍合金管以所需坡口焊的一侧朝右放置在磁悬浮检测系统内,然后通过管体固定系统对该镍合金管进行固定夹持,接着通过磁悬浮检测系统对该镍合金的内壁进行裂缝的位置以及延伸结构的检测,同时通过裂缝修复系统对该镍合金管的坡口位置进行裂缝修复;
3、达到了磁悬浮式对镍合金管内壁裂缝的检测,同时可以利用磁性调节管内检测器转动,得到裂缝的横向以及纵向的位置数据差值,进而检测裂缝的延伸结构,同时配合间隔检测,防止定位失准,并且对坡口处裂缝进行挤压加热修复,提高焊接质量的效果。
附图说明
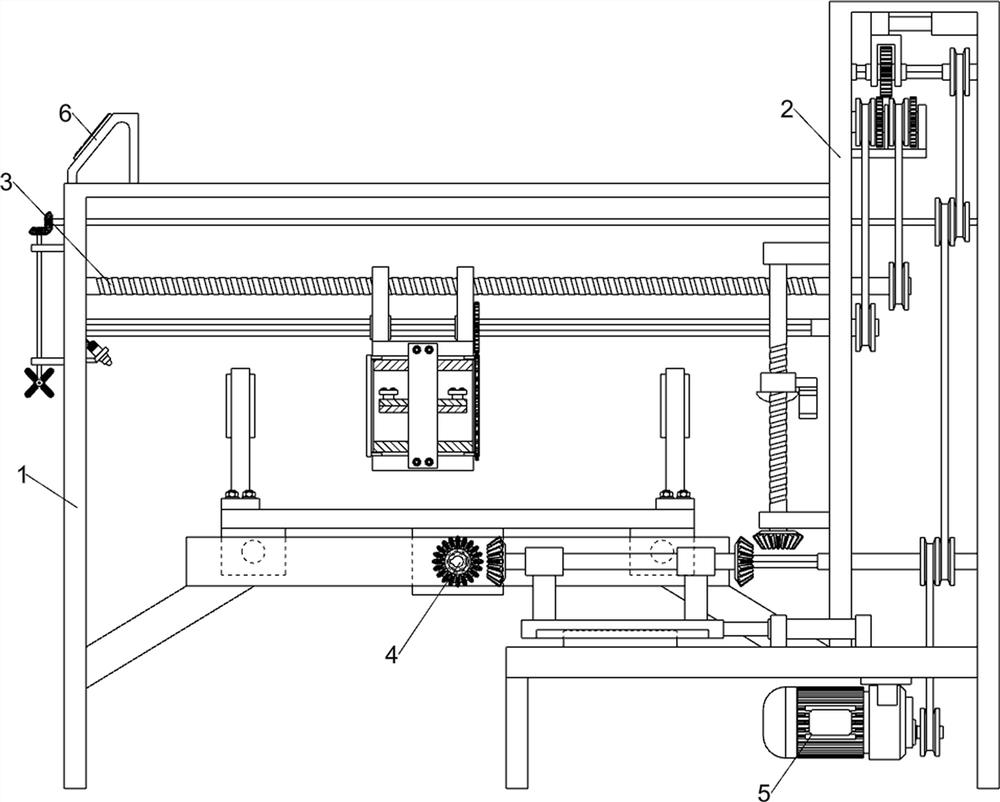
图1为本发明的结构示意图;
图2为本发明的磁悬浮检测系统结构示意图;
图3为本发明的管体固定系统结构示意图;
图4为本发明的管体固定系统立体结构示意图;
图5为本发明的裂缝修复系统结构示意图;
图6为本发明的第六锥齿轮、第三丝杆、承接板、压块、加热架、第三滑杆、第三侧板和第四侧板组合右视图。
图中标记为:1-第一支撑框架,2-第二支撑框架,3-磁悬浮检测系统,4-管体固定系统,5-裂缝修复系统,6-实时控制屏,301-第一轴杆,302-第一传动轮,303-第二传动轮,304-第三传动轮,305-第二轴杆,306-第一花键轴,307-第一传动套,308-第一平齿轮,309-U型板,3010-推块,3011-第一电动推杆,3012-连接架,3013-第四传动轮,3014-第二平齿轮,3015-第五传动轮,3016-第三平齿轮,3017-第六传动轮,3018-第七传动轮,3019-第一丝杆,3020-第二花键轴,3021-第一连接板,3022-第二连接板,3023-第四平齿轮,3024-第一衔接板,3025-第二衔接板,3026-第三衔接板,3027-第一承接环,3028-第二承接环,3029-齿环,3030-第一磁铁,3031-第二磁铁,3032-转动圆环,3033-第三磁铁,3034-第一探测头,3035-第二探测头,3036-第一锥齿轮,3037-第二锥齿轮,3038-第三轴杆,3039-毛刷,3040-喷头,401-第一侧板,402-第三锥齿轮,403-第二丝杆,404-第一传动块,405-第二传动块,406-第一滑杆,407-第一滑套,408-第二滑套,409-第二滑杆,4010-第三滑套,4011-第四滑套,4012-第一固定座,4013-第一连接块,4014-第二连接块,4015-第一弧板,4016-第二弧板,4017-第二固定座,4018-第三连接块,4019-第三弧板,4020-第四连接块,4021-第四弧板,4022-第二侧板,501-固定架,502-动力电机,503-第八传动轮,504-第九传动轮,505-第十传动轮,506-第四轴杆,507-第三花键轴,508-第二传动套,509-第四锥齿轮,5010-第五锥齿轮,5011-第一连接杆,5012-第二连接杆,5013-连接滑板,5014-限位滑条,5015-第二电动推杆,5016-第六锥齿轮,5017-第三丝杆,5018-承接板,5019-压块,5020-加热架,5021-第三滑杆,5022-第三侧板,5023-第四侧板。
具体实施方式
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
实施例1
一种磁悬浮式镍合金管裂缝检测装置,如图1-6所示,包括有第一支撑框架1、第二支撑框架2、磁悬浮检测系统3、管体固定系统4、裂缝修复系统5和实时控制屏6;第二支撑框架2与第一支撑框架1进行固接;第二支撑框架2与磁悬浮检测系统3相连接;磁悬浮检测系统3与第一支撑框架1相连接;磁悬浮检测系统3与裂缝修复系统5相连接;管体固定系统4与裂缝修复系统5相连接;管体固定系统4与第一支撑框架1相连接;裂缝修复系统5与第二支撑框架2相连接;实时控制屏6与第一支撑框架1相连接。
使用该装置时,将该装置水平固定在所需使用的位置,外接电源,操作人员通过实时控制屏6对该装置进行整体调配,对该装置调试完成后开始工作,首先人工将镍合金管放入磁悬浮检测系统3内,通过磁悬浮检测系统3对镍合金管进行坡口清扫以及着色剂喷涂,然后人工将镍合金管以所需坡口焊的一侧朝右放置在磁悬浮检测系统3内,然后通过管体固定系统4对该镍合金管进行固定夹持,接着通过磁悬浮检测系统3对该镍合金的内壁进行裂缝的位置以及延伸结构的检测,同时通过裂缝修复系统5对该镍合金管的坡口位置进行裂缝修复,该装置达到了磁悬浮式对镍合金管内壁裂缝的检测,同时可以利用磁性调节管内检测器转动,得到裂缝的横向以及纵向的位置数据差值,进而检测裂缝的延伸结构,同时配合间隔检测,防止定位失准,并且对坡口处裂缝进行挤压加热修复,提高焊接质量的效果。
磁悬浮检测系统3包括有第一轴杆301、第一传动轮302、第二传动轮303、第三传动轮304、第二轴杆305、第一花键轴306、第一传动套307、第一平齿轮308、U型板309、推块3010、第一电动推杆3011、连接架3012、第四传动轮3013、第二平齿轮3014、第五传动轮3015、第三平齿轮3016、第六传动轮3017、第七传动轮3018、第一丝杆3019、第二花键轴3020、第一连接板3021、第二连接板3022、第四平齿轮3023、第一衔接板3024、第二衔接板3025、第三衔接板3026、第一承接环3027、第二承接环3028、齿环3029、第一磁铁3030、第二磁铁3031、转动圆环3032、第三磁铁3033、第一探测头3034、第二探测头3035、第一锥齿轮3036、第二锥齿轮3037、第三轴杆3038、毛刷3039和喷头3040;第二传动轮303与裂缝修复系统5相连接;第一轴杆301外表面依次与第一传动轮302、第二传动轮303和第一锥齿轮3036进行固接;第一轴杆301与第一支撑框架1进行转动连接;第一轴杆301与第二支撑框架2进行转动连接;第一传动轮302外环面通过皮带与第三传动轮304进行传动连接;第三传动轮304与第二轴杆305进行固接;第二轴杆305与第一花键轴306进行固接;第二轴杆305与第二支撑框架2进行转动连接;第一花键轴306与第一传动套307进行传动连接;第一花键轴306与第二支撑框架2进行转动连接;第一传动套307与第一平齿轮308进行固接;第一传动套307与U型板309进行转动连接;第一平齿轮308下方一侧设置有第二平齿轮3014;第一平齿轮308下方另一侧设置有第三平齿轮3016;U型板309与推块3010进行固接;推块3010与第一电动推杆3011相连接;第一电动推杆3011与第二支撑框架2进行固接;连接架3012通过转轴与第四传动轮3013和第二平齿轮3014进行转动连接;连接架3012通过转轴与第五传动轮3015和第三平齿轮3016进行转动连接;连接架3012与第二支撑框架2进行固接;第四传动轮3013通过转轴与第二平齿轮3014进行固接;第四传动轮3013外环面通过皮带与第七传动轮3018进行传动连接;第五传动轮3015通过转轴与第三平齿轮3016进行固接;第五传动轮3015外环面通过皮带与第六传动轮3017进行传动连接;第六传动轮3017与第一丝杆3019进行固接;第七传动轮3018与第二花键轴3020进行固接;第一丝杆3019依次与第一连接板3021和第二连接板3022进行旋接;第一丝杆3019与第一支撑框架1进行转动连接;第一丝杆3019与第二支撑框架2进行转动连接;第二花键轴3020依次与第一连接板3021和第二连接板3022进行转动连接;第二花键轴3020与第一支撑框架1进行转动连接;第二花键轴3020与第二支撑框架2进行转动连接;第二连接板3022通过轴承套与第四平齿轮3023进行转动连接;第四平齿轮3023下方与齿环3029相互啮合;第一衔接板3024上方依次与第一连接板3021和第二连接板3022进行固接;第二衔接板3025后方一侧通过螺母与第一衔接板3024进行螺栓连接;第二衔接板3025后方另一侧通过螺母与第三衔接板3026进行螺栓连接;第一承接环3027上方与第一衔接板3024进行固接;第一承接环3027下方与第三衔接板3026进行固接;第一承接环3027与转动圆环3032相连接;第二承接环3028依次与第一磁铁3030和第二磁铁3031进行固接;第二承接环3028与齿环3029进行固接;第一磁铁3030上方设置有第三磁铁3033;第二磁铁3031下方设置有第一探测头3034和第二探测头3035;转动圆环3032依次与第一磁铁3030和第二磁铁3031进行固接;第三磁铁3033上表面依次设置有第一探测头3034和第二探测头3035;第一锥齿轮3036与第二锥齿轮3037相互啮合;第二锥齿轮3037与第三轴杆3038进行固接;第三轴杆3038与第一支撑框架1进行转动连接;第三轴杆3038与毛刷3039进行固接;毛刷3039侧面设置有喷头3040;喷头3040与第一支撑框架1相连接。
首先人工将镍合金管的管口朝后放置在毛刷3039的前侧,通过第十传动轮505传动第二传动轮303,进而第二传动轮303带动第一轴杆301进行转动,进而第一轴杆301带动第一传动轮302和第一锥齿轮3036同步进行转动,通过第一锥齿轮3036转动带动第二锥齿轮3037进行转动,进而第二锥齿轮3037带动第三轴杆3038进行转动,进而第三轴杆3038带动毛刷3039进行转动,通过毛刷3039对镍合金管的管口处进行清扫,清理掉附着在管口的杂质,毛刷3039为X字型,可以对镍合金管的管口进行最大面积的清理,然后将镍合金管放置在喷头3040下方,通过喷头3040对镍合金管喷涂着色剂,然后人工将镍合金以管口朝右的状态插入第一承接环3027和第二承接环3028内,使转动圆环3032、第三磁铁3033、第一探测头3034和第二探测头3035位于镍合金管内,第二磁铁3031和第三磁铁3033的相对面为异名磁极,第一磁铁3030和第三磁铁3033的相对面为异名磁极,进而通过异名磁极相吸原理使第二磁铁3031对第三磁铁3033产生吸力以及第一磁铁3030对第三磁铁3033同时产生吸力,通过两个相反方向的吸力,使第三磁铁3033、第一探测头3034和第二探测头3035悬浮于镍合金管内,同时第一传动轮302带动第三传动轮304进行转动,进而第三传动轮304带动第二轴杆305进行转动,进而第二轴杆305带动第一花键轴306进行转动,进而第一花键轴306带动第一传动套307进行转动,进而第一传动套307带动第一平齿轮308进行转动,启动第一电动推杆3011,推动推块3010,通过推块3010推动U型板309,进而通过U型板309带动第一传动套307在第一花键轴306表面滑动,进而使第一平齿轮308可以左右平移,控制第一平齿轮308与第二平齿轮3014和第三平齿轮3016的选择性啮合,先使第一平齿轮308与第三平齿轮3016啮合传动,通过第三平齿轮3016转动带动第五传动轮3015进行转动,进而第五传动轮3015带动第六传动轮3017进行转动,进而第六传动轮3017带动第一丝杆3019进行转动,进而第一丝杆3019转动使第一连接板3021和第二连接板3022以及与这两者相连接的部件同步移动,此时第三磁铁3033、第一探测头3034和第二探测头3035在磁性吸力的作用下同步移动,当第二探测头3035检测到裂缝一侧时,第一探测头3034间隔固定时间同样检测到该裂缝一侧,然后使第三磁铁3033、第一探测头3034和第二探测头3035继续移动,当裂缝延伸有倾斜状态时,控制第一平齿轮308与第二平齿轮3014啮合传动,通过第二平齿轮3014转动带动第四传动轮3013进行转动,进而第四传动轮3013带动第七传动轮3018进行转动,进而第七传动轮3018带动第二花键轴3020进行转动,进而第二花键轴3020通过轴承套传动第四平齿轮3023,使第四平齿轮3023转动带动齿环3029进行转动,进而使第二承接环3028带动第一磁铁3030和第二磁铁3031进行转动,同时通过磁力使第三磁铁3033、第一探测头3034和第二探测头3035同步转动,使第一探测头3034和第二探测头3035同样间隔固定时间检测到裂缝的另一侧位置,进而通过检测到的两侧位置得到裂缝的延伸结构,并且通过第一探测头3034和第二探测头3035的间隔检测防止定位失准,该系统实现了对裂缝的延伸结构的检测,并且可避免定位失准的情况。
管体固定系统4包括有第一侧板401、第三锥齿轮402、第二丝杆403、第一传动块404、第二传动块405、第一滑杆406、第一滑套407、第二滑套408、第二滑杆409、第三滑套4010、第四滑套4011、第一固定座4012、第一连接块4013、第二连接块4014、第一弧板4015、第二弧板4016、第二固定座4017、第三连接块4018、第三弧板4019、第四连接块4020、第四弧板4021和第二侧板4022;第一侧板401下方一侧与第一支撑框架1进行固接;第一侧板401下方另一侧与裂缝修复系统5相连接;第三锥齿轮402与第二丝杆403进行固接;第二丝杆403依次与第一传动块404和第二传动块405进行旋接;第二丝杆403外表面一侧与第一侧板401进行转动连接;第二丝杆403外表面另一侧与第二侧板4022进行转动连接;第一滑杆406外表面依次与第一滑套407和第二滑套408进行滑动连接;第一滑杆406一侧与第一侧板401进行固接;第一滑杆406另一侧与第二侧板4022进行固接;第二滑杆409外表面依次与第三滑套4010和第四滑套4011进行滑动连接;第二滑杆409一侧与第一侧板401进行固接;第二滑杆409另一侧与第二侧板4022进行固接;第一固定座4012下方依次与第一滑套407、第一传动块404和第三滑套4010进行固接;第一固定座4012上方两侧分别通过螺母与第一连接块4013和第二连接块4014进行螺栓连接;第一连接块4013与第一弧板4015进行固接;第二连接块4014与第二弧板4016进行固接;第二固定座4017下方依次与第二滑套408、第二传动块405和第四滑套4011进行固接;第二固定座4017上方两侧分别通过螺母与第三连接块4018和第四连接块4020进行螺栓连接;第三连接块4018与第三弧板4019进行固接;第四连接块4020与第四弧板4021进行固接;第二侧板4022下方一侧与第一支撑框架1进行固接;第二侧板4022下方另一侧与裂缝修复系统5相连接。
当镍合金管在磁悬浮检测系统3内放置好后,控制第四锥齿轮509与第三锥齿轮402啮合时,通过第四锥齿轮509带动第三锥齿轮402进行转动,进而第三锥齿轮402带动第二丝杆403进行转动,进而第二丝杆403转动使第一传动块404和第二传动块405相互靠近移动,同时第一传动块404带动第一固定座4012移动,第二传动块405带动第二固定座4017移动,进而使第一固定座4012和第二固定座4017同样相互靠近移动,同时第一固定座4012带动第一滑套407在第一滑杆406表面滑动以及第三滑套4010在第二滑杆409表面滑动,第一滑套407和第三滑套4010对第一固定座4012的移动起辅助支撑作用,第二固定座4017带动第二滑套408在第一滑杆406表面滑动以及第四滑套4011在第二滑杆409表面滑动,第二滑套408和第四滑套4011对第二固定座4017的移动起辅助支撑作用,此时第一固定座4012带动第一连接块4013、第二连接块4014、第一弧板4015和第二弧板4016同步移动,第二固定座4017带动第三连接块4018、第三弧板4019、第四连接块4020和第四弧板4021同步移动,进而使第一弧板4015和第三弧板4019相互靠近移动,第二弧板4016与第四弧板4021相互靠近移动,通过第一弧板4015和第三弧板4019以及第二弧板4016与第四弧板4021同时将镍合金管夹住固定,该系统实现了对镍合金管的固定。
裂缝修复系统5包括有固定架501、动力电机502、第八传动轮503、第九传动轮504、第十传动轮505、第四轴杆506、第三花键轴507、第二传动套508、第四锥齿轮509、第五锥齿轮5010、第一连接杆5011、第二连接杆5012、连接滑板5013、限位滑条5014、第二电动推杆5015、第六锥齿轮5016、第三丝杆5017、承接板5018、压块5019、加热架5020、第三滑杆5021、第三侧板5022和第四侧板5023;固定架501与第一侧板401进行固接;固定架501与第二侧板4022进行固接;固定架501与第二支撑框架2进行固接;动力电机502通过螺母与固定架501进行螺栓连接;动力电机502输出轴与第八传动轮503进行固接;第八传动轮503外环面通过皮带与第九传动轮504进行传动连接;第十传动轮505外环面通过皮带与第二传动轮303进行传动连接;第四轴杆506外表面依次与第九传动轮504和第十传动轮505进行固接;第四轴杆506侧面与第三花键轴507进行固接;第四轴杆506与第二支撑框架2进行转动连接;第三花键轴507与第二传动套508进行传动连接;第二传动套508外表面两侧分别与第四锥齿轮509和第五锥齿轮5010进行固接;第二传动套508依次与第一连接杆5011和第二连接杆5012进行转动连接;第五锥齿轮5010右侧上方设置有第六锥齿轮5016;连接滑板5013上方依次与第一连接杆5011和第二连接杆5012进行固接;连接滑板5013与限位滑条5014进行滑动连接;连接滑板5013与第二电动推杆5015相连接;限位滑条5014与固定架501进行固接;第二电动推杆5015与固定架501进行固接;第六锥齿轮5016与第三丝杆5017进行固接;第三丝杆5017与承接板5018进行旋接;第三丝杆5017上方与第三侧板5022进行转动连接;第三丝杆5017下方与第四侧板5023进行转动连接;承接板5018与第三滑杆5021进行滑动连接;承接板5018与压块5019进行固接;承接板5018与加热架5020进行固接;第三滑杆5021上方与第三侧板5022进行固接;第三滑杆5021下方与第四侧板5023进行固接;第三侧板5022与第二支撑框架2进行固接;第四侧板5023与第二支撑框架2进行固接。
当管体固定系统4将镍合金管固定完成后,首先启动动力电机502,使第八传动轮503进行转动,进而第八传动轮503带动第九传动轮504进行转动,进而第九传动轮504带动第四轴杆506进行转动,进而第四轴杆506带动第十传动轮505和第三花键轴507同步进行转动,进而第十传动轮505可传动磁悬浮检测系统3,同时第三花键轴507传动第二传动套508,使第二传动套508带动第四锥齿轮509和第五锥齿轮5010同步进行转动,通过第二电动推杆5015推动连接滑板5013在限位滑条5014上表面滑动,进而通过连接滑板5013移动带动第一连接杆5011和第二连接杆5012同步进行移动,进而通过第一连接杆5011和第二连接杆5012带动第二传动套508在第三花键轴507表面滑动,进而可使第二传动套508带动第四锥齿轮509和第五锥齿轮5010同步左右移动,控制第四锥齿轮509与第三锥齿轮402的啮合,控制第五锥齿轮5010与第六锥齿轮5016的啮合,当观测到镍合金管口裂缝位置时,人工将镍合金管转动,使裂缝位置位于压块5019和加热架5020之间下方,当第五锥齿轮5010与第六锥齿轮5016啮合时,通过第五锥齿轮5010带动第六锥齿轮5016进行转动,进而第六锥齿轮5016带动第三丝杆5017进行转动,进而第三丝杆5017转动控制承接板5018移动,同时承接板5018在第三滑杆5021的表面滑动,进而使压块5019和加热架5020同时下移,通过压块5019对镍合金管的裂缝处进行挤压,裂缝处管口受力贴合,进而通过加热架5020对该裂缝进行加热修复,加热架5020为“士”字型,可以从内壁与外壁位置同时进行热传导,该系统实现了对镍合金管的管口裂缝的修复。
毛刷3039为X字型。
可以对镍合金管的管口进行最大面积的清理。
第二磁铁3031和第三磁铁3033的相对面为异名磁极,第一磁铁3030和第三磁铁3033的相对面为异名磁极。
可以通过异名磁极相吸原理使第二磁铁3031对第三磁铁3033产生吸力以及第一磁铁3030对第三磁铁3033同时产生吸力,通过两个相反方向的吸力,使第三磁铁3033、第一探测头3034和第二探测头3035悬浮于镍合金管内。
压块5019下表面为弯弧面。
可以避免对镍合金管进行挤压时对管体造成损伤。
加热架5020为“士”字型。
可以从内壁与外壁位置同时进行热传导。
应理解,该实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
- 一种磁悬浮式镍合金管裂缝检测装置
- 一种镍钒合金管靶及生产方法