一种5G智能制造物料运送机器人
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及物料运输技术领域,尤其涉及一种5G智能制造物料运送机器人。
背景技术
在数字化浪潮的驱动下,大数据、云计算、人工智能等新一代信息通信技术与制造业的融合逐渐从理念普及走向应用推广,制造业智能化、柔性化、服务化、高端化转型发展趋势愈发明显,对高性能、具有灵活组网能力的无线网络需求日益迫切。2019年是5G商用的元年,5G具有媲美光纤的传输速度、万物互联的泛在连接和接近工业总线的实时能力,正逐步向工业领域加强渗透,引发一系列融合创新应用与变革,为制造业转型升级带来历史性的发展机遇。
物料运送是智能制造中十分重要的工序,现有的物料运送装置大都结构固定,只能在水平方向对物料进行位置传送,随着5G智能制造技术的进步,物流等技术的发展,现在有很多物料运送需要向高处进行运送作业,现有的物料运送装置基本都不能实现这样的物料运送功能。
发明内容
本发明的目的在于提供一种5G智能制造物料运送机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种5G智能制造物料运送机器人,包括底座、顶板和活动架,所述底座上端面的两侧固定安装有一对对称设置的支撑架,所述顶板固定安装在一对支撑架的顶端,所述活动架设置有两个,两个所述活动架设置在一对支撑架之间,一对所述支撑架与活动架之间设置有横向位移传动机构,两个所述活动架之间的两端固定安装有一对连接板,一对所述连接板之间的左右两侧转动安装有对称设置的第一蜗杆和第二蜗杆,所述第一蜗杆和第二蜗杆设置为参数相同的蜗杆,所述第一蜗杆和第二蜗杆的一端分别与第二电动机和第三电动机的输出端固定相连,所述第一蜗杆和第二蜗杆之间设置有蜗轮,所述蜗轮的两侧分别与第一蜗杆和第二蜗杆啮合传动,所述蜗轮内固定安装有转动轴,一对所述活动架之间的前侧固定安装有一对对称设置的导向板,一对所述导向板之间滑动安装有滑块,所述转动轴的中部转动安装在滑块中,所述转动轴远离蜗轮的一端固定安装在转动板中,所述转动板的前侧设置有放置板,所述放置板与转动板之间设置有伸缩推动传动机构。
作为本发明进一步的方案:所述横向位移传动机构包括导向柱、螺纹杆、第一电动机、滑动孔和螺纹孔,一对所述支撑架之间的上部和下部固定安装有一对对称设置的导向柱,一对所述支撑架之间的中部转动安装有螺纹杆,所述螺纹杆的一端与第一电动机的输出端固定相连,所述活动架的上部和下部贯通开有对称设置的滑动孔,所述活动架通过滑动孔与导向柱滑动连接,所述活动架的中部贯通开有螺纹孔,所述活动架通过螺纹孔与螺纹杆螺纹连接。
作为本发明进一步的方案:所述伸缩推动传动机构包括电动推杆安装孔、电动推杆和放置板,所述转动板的左右两端贯通开有一对对称设置的电动推杆安装孔,所述电动推杆安装孔中固定安装有输出端竖直向前的电动推杆,所述放置板固定安装在一对电动推杆的输出端。
作为本发明进一步的方案:所述滑块的中部贯通开有转动安装孔,所述转动板的中部设置有固定安装孔,所述转动轴的中部转动安装在转动安装孔中,所述转动轴远离蜗轮的一端固定安装在固定安装孔中。
作为本发明进一步的方案:一对所述支撑架之间的上部和下部对称设置有第一安装孔,一对所述支撑架之间的中部贯通设置有第二安装孔,所述导向柱的两端固定安装在第一安装孔中,所述螺纹杆的两端转动安装在第二安装孔中。
作为本发明进一步的方案:所述放置板上端面靠近转动板的一侧固定安装有挡板。
作为本发明进一步的方案:所述第二电动机和第三电动机固定安装在连接板的顶部,所述顶板中贯通开有横向设置的滑槽,所述第二电动机和第三电动机滑动安装在滑槽中。
作为本发明进一步的方案:所述底座的底部固定安装有多个对称设置的万向轮,所述万向轮设置为带有刹车踏板的自锁式万向轮。
与现有技术相比,本发明的有益效果是:本发明能够与横向位移传动机构的配合实现物料的上下左右运输,到达位置之后,能够控制转动板和放置板倾斜转动,并与伸缩推动传动机构配合,从而将待运送的物料放置在确定的物料放置处,能够通过5G智能控制,提高了物料运送的效率。
附图说明
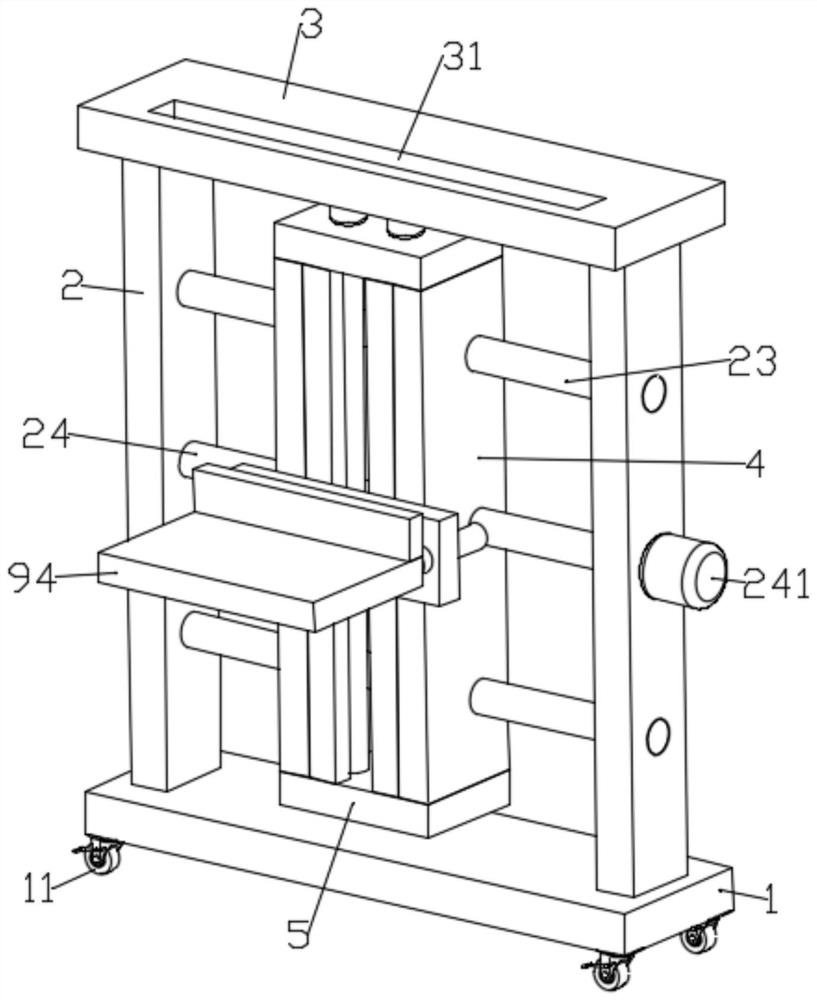
图1为一种5G智能制造物料运送机器人的结构示意图。
图2为一种5G智能制造物料运送机器人的底座、支撑架和顶板的结构示意图。
图3为一种5G智能制造物料运送机器人的活动架、连接板和滑块的结构示意图。
图4为一种5G智能制造物料运送机器人的第一蜗杆、第二蜗杆和蜗轮的结构示意图。
图5为一种5G智能制造物料运送机器人的伸缩推动传动机构的结构示意图。
图6为一种5G智能制造物料运送机器人的蜗轮、滑块和转动板的连接示意图。
图中:1-底座,11-万向轮,111-刹车踏板,2-支撑架,21-第一安装孔,22-第二安装孔,23-导向柱,24-螺纹杆,241-第一电动机,3-顶板,31-滑槽,4-活动架,41-滑动孔,42-螺纹孔,43-导向板,44-滑块,441-转动安装孔,5-连接板,6-第一蜗杆,61-第二电动机,7-第二蜗杆,71-第三电动机,8-蜗轮,81-转动轴,9-转动板,91-固定安装孔,92-电动推杆安装孔,93-电动推杆,94-放置板,95-挡板。
具体实施方式
在本发明的描述中,需要理解的是,术语 “上”、“下”、“顶”、“底”、“前”、“后”、“左”、“右”、“内”、“外”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
实施例1:
请参阅图1~6,一种5G智能制造物料运送机器人,包括底座1、顶板3和活动架4,所述底座1上端面的两侧固定安装有一对对称设置的支撑架2,所述顶板3固定安装在一对支撑架2的顶端,所述活动架4设置有两个,两个所述活动架4设置在一对支撑架2之间,一对所述支撑架2与活动架4之间设置有横向位移传动机构,两个所述活动架4之间的两端固定安装有一对连接板5,一对所述连接板5之间的左右两侧转动安装有对称设置的第一蜗杆6和第二蜗杆7,所述第一蜗杆6和第二蜗杆7设置为参数相同的蜗杆,所述第一蜗杆6和第二蜗杆7的一端分别与第二电动机61和第三电动机71的输出端固定相连,所述第一蜗杆6和第二蜗杆7之间设置有蜗轮8,所述蜗轮8的两侧分别与第一蜗杆6和第二蜗杆7啮合传动,所述蜗轮8内固定安装有转动轴81,一对所述活动架4之间的前侧固定安装有一对对称设置的导向板43,一对所述导向板43之间滑动安装有滑块44,所述转动轴81的中部转动安装在滑块44中,所述转动轴81远离蜗轮8的一端固定安装在转动板9中,所述转动板9的前侧设置有放置板94,所述放置板94与转动板9之间设置有伸缩推动传动机构。
所述横向位移传动机构包括导向柱23、螺纹杆24、第一电动机241、滑动孔41和螺纹孔42,一对所述支撑架2之间的上部和下部固定安装有一对对称设置的导向柱23,一对所述支撑架2之间的中部转动安装有螺纹杆24,所述螺纹杆24的一端与第一电动机241的输出端固定相连,所述活动架4的上部和下部贯通开有对称设置的滑动孔41,所述活动架4通过滑动孔41与导向柱23滑动连接,所述活动架4的中部贯通开有螺纹孔42,所述活动架4通过螺纹孔42与螺纹杆24螺纹连接。
所述伸缩推动传动机构包括电动推杆安装孔92、电动推杆93和放置板94,所述转动板9的左右两端贯通开有一对对称设置的电动推杆安装孔92,所述电动推杆安装孔92中固定安装有输出端竖直向前的电动推杆93,所述放置板94固定安装在一对电动推杆93的输出端。
实施例1的工作原理:将待运送的物料放置在放置板94的上端,通过5G网络控制第一电动机241工作,第一电动机241带动螺纹杆24转动,配合导向柱23的滑动导向,使得活动架4在一对支撑架2之间左右移动,使得物料到达一对支撑架2之间的物料放置的位置处,通过5G网络控制第二电动机61和第三电动机71工作,当第二电动机61和第三电动机71带动第一蜗杆6和第二蜗杆7同速同向转动时,蜗轮8在第一蜗杆6和第二蜗杆7之间实现升降运动,通过转动轴81带动滑块44在一对导向板43之间升降滑动,从而能够带动放置板94和物料升降至待运送的位置上侧,此时电动推杆93工作,将放置板94向外推动至运送目标处的正上方,然后第二电动机61和第三电动机71带动第一蜗杆6和第二蜗杆7同速反向转动,蜗轮8的两侧分别与第一蜗杆6和第二蜗杆7啮合传动,带动蜗轮8在第一蜗杆6和第二蜗杆7转动,通过转动轴81带动转动板9和放置板94转动而倾斜,使得放置板94上端面的物料掉落至目标位置处。
实施例2:
请参阅图1~6,一种5G智能制造物料运送机器人,在实施例1的基础上,所述滑块44的中部贯通开有转动安装孔441,所述转动板9的中部设置有固定安装孔91,所述转动轴81的中部转动安装在转动安装孔441中,所述转动轴81远离蜗轮8的一端固定安装在固定安装孔91中,一对所述支撑架2之间的上部和下部对称设置有第一安装孔21,一对所述支撑架2之间的中部贯通设置有第二安装孔22,所述导向柱23的两端固定安装在第一安装孔21中,所述螺纹杆24的两端转动安装在第二安装孔22中,所述放置板94上端面靠近转动板9的一侧固定安装有挡板95,限制放置板94的上端面物料放置区域,防止升降和左右移动时,放置板94上端面的物料掉落,所述第二电动机61和第三电动机71固定安装在连接板5的顶部,所述顶板3中贯通开有横向设置的滑槽31,所述第二电动机61和第三电动机71滑动安装在滑槽31中,防止第二电动机61和第三电动机71移动时与顶板3触碰,所述底座1的底部固定安装有多个对称设置的万向轮11,所述万向轮11设置为带有刹车踏板111的自锁式万向轮,便于一种5G智能制造物料运送机器人位置的移动和固定。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种5G智能制造物料运送机器人
- 一种机器人及使用该机器人进行物料运送的系统和方法