一种无人机高空投放装置及方法
文献发布时间:2023-06-19 10:13:22
技术领域
本申请属于无人机领域,特别涉及一种无人机高空投放装置及方法。
背景技术
随着无人机技术的发展,小型无人机技术得到了空前发展,无人机蜂群作战成为了一种重要的作战模式。无人机蜂群作战是将大量小型自治无人机与远程空中投送手段相结合,在强对抗环境中自组织有机协同配合,对敌防御体系形成持续压倒性优势的低成本饱和攻击的集群作战系统。
针对无人机集群应用需求,对无人机提出多样式的发射方式,实现小型无人机的全自动高速发射。如何在下落的过程中保持飞机的姿态是无人机高空投放的关键难点。
因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
发明内容
本申请的目的是提供了一种无人机高空投放装置及方法,以解决现有技术存在的至少一个问题。
本申请的技术方案是:
本申请的第一个方面提供了一种无人机高空投放装置,包括:
止动机构,包括两个,两个所述止动机构对称设置在无人机的两侧机翼上,所述止动机构上开设有通孔;
连接绳,所述连接绳上配置有两个限位滑块,所述连接绳的两端分别穿过对应的所述止动机构的通孔后,通过所述限位滑块进行限位;
稳定伞,包括两个,两个所述稳定伞分别设置在所述连接绳的两端;
稳定伞脱落控制器,所述稳定伞脱落控制器设置在所述无人机的机身上,能够根据安装在所述无人机上的速度传感器信号和\或安装在所述连接绳上的力传感器信号,对所述连接绳进行切断。
可选地,所述稳定伞脱落控制器为切伞火工品。
本申请的第二个方面提供了一种无人机高空投放方法,基于如上所述的无人机高空投放装置,包括:
步骤一、将无人机从载体上进行高空投放;
步骤二、
当安装在无人机上的速度传感器测得无人机到达预定速度时,稳定伞脱落控制器切断连接绳,和\或
当安装在连接绳上的力传感器测得连接绳受到预定拉力时,稳定伞脱落控制器切断连接绳;
步骤三、无人机飞控系统利用舵面控制无人机由垂直向下改为平飞。
可选地,所述载体包括运输机、系留气球以及飞艇。
可选地,步骤二中,所述预定速度为
可选地,所述预定拉力为F=0.5mg,其中,m为无人机质量,g为重力加速度。
发明至少存在以下有益技术效果:
本申请的无人机高空投放装置,在无人机投放时无需保证飞机的姿态,通过无人机自带稳定伞,在下落过程中自动摆正姿态,对发射载体的要求较低,更加能够应对未来多变的战场环境。
附图说明
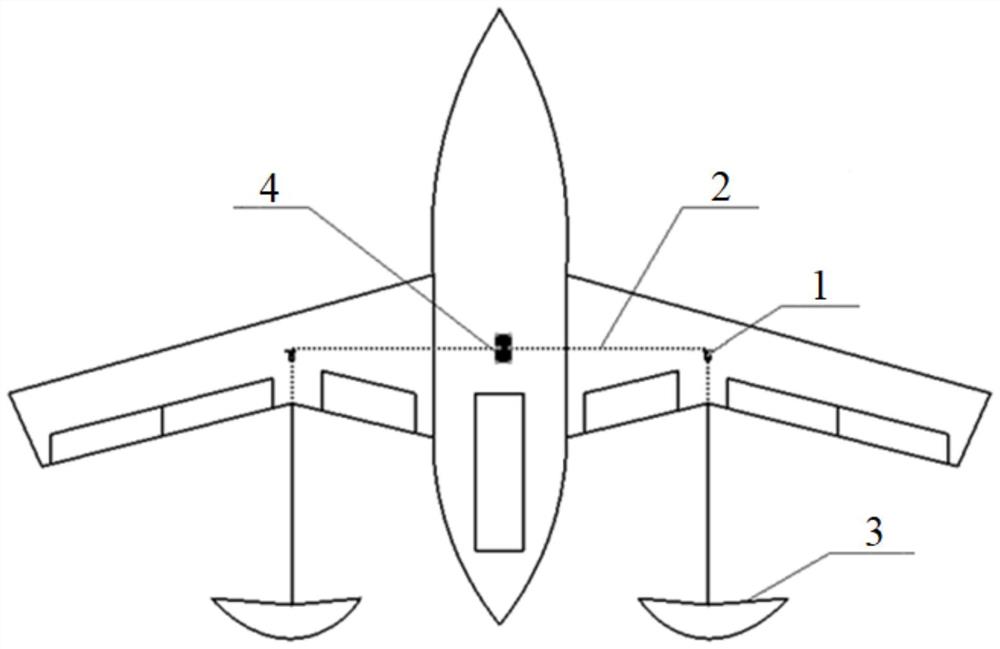
图1是本申请一个实施方式的无人机高空投放装置示意图;
图2是本申请一个实施方式的无人机高空投放装置连接绳安装示意图。
其中:
1-止动机构;2-连接绳;3-稳定伞;4-稳定伞脱落控制器;5-限位滑块。
具体实施方式
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本申请一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。下面结合附图对本申请的实施例进行详细说明。
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制。
下面结合附图1至图2对本申请做进一步详细说明。
本申请的第一个方面提供了一种无人机高空投放装置,包括:止动机构1、连接绳2、稳定伞3以及稳定伞脱落控制器4。
止动机构1包括两个,两个止动机构1对称设置在无人机的左侧机翼和右侧机翼上,止动机构1上开设有通孔;连接绳2上配置有两个限位滑块5,连接绳2的两端分别穿过对应的止动机构1的通孔后,通过限位滑块5进行限位;稳定伞3包括两个,两个稳定伞3分别设置在连接绳2的两端;稳定伞脱落控制器4设置在无人机的机身上,能够根据安装在无人机上的速度传感器信号和\或安装在连接绳2上的力传感器信号,对连接绳2进行切断。
本申请的无人机高空投放装置,发动机布置在无人机机身底部的后侧,为了远离发动机,需要在左侧和右侧机翼上分别设置一个止动机构1,并在两侧的止动机构1上各配置一把稳定伞3,通过对应侧的止动机构1和限位滑块5使2把稳定伞3位置固定,左右对称。脱离时,需要在抛伞时,同时将两把稳定伞3抛掉,防止不同时脱离使无人机失控。稳定伞脱落控制器4无人机机身上,位于2个止动机构1之间,能够根据安装在无人机上的速度传感器信号和\或安装在连接绳2上的力传感器信号切断连接绳2,连接绳2切断后,不会受到止动机构1的影响,直接从机体分离,有效保证2把稳定伞3同时脱离。在本申请的一个实施方式中,稳定伞脱落控制器4为切伞火工品。
本申请的第二个方面提供了一种无人机高空投放方法,基于如上的无人机高空投放装置,包括以下步骤:
步骤一、将无人机从载体上进行高空投放;
步骤二、
当安装在无人机上的速度传感器测得无人机到达预定速度时,稳定伞脱落控制器4切断连接绳2,和\或
当安装在连接绳2上的力传感器测得连接绳2受到预定拉力时,稳定伞脱落控制器4切断连接绳2;
步骤三、无人机飞控系统利用舵面控制无人机由垂直向下改为平飞。
本申请的无人机高空投放方法,为保证无人机的姿态,在无人机后部设计稳定装置,无人机高空投放装置能够控制由运输机、系留气球以及飞艇等载体上投放的无人机,保证飞机的迎角和侧滑角,保持姿态可控。无人机由载体上高空投放后,通过重力加速,使无人机获得飞行速度,当达到一定速度后,稳定伞3的阻力等于无人机重力,无人机停止加速,达到稳定飞行的速度,此时,稳定伞3受到的拉力为0.5mg,连接绳2中间设计的稳定伞脱落控制器4自动切断。
在本申请的一个实施方式中,当安装在无人机上的速度传感器测得无人机到达预定速度
在本申请的一个实施方式中,当安装在连接绳2上的力传感器测得连接绳2受到预定拉力F=0.5mg时,稳定伞脱落控制器4切断连接绳2,其中,m为无人机质量,g为重力加速度。
本申请的无人机高空投放装置及方法,使得无人机能够在运输机的高速飞机上投放,也能在系留气球、飞艇等低速载体上投放,通过重力加速,使无人机获得飞行速度。无人机投放时无需保证飞机的姿态,通过无人机自带稳定伞,在下落过程中自动摆正姿态,对发射载体的要求较低,只需要足够高度,更加能够应对未来多变的战场环境。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
- 一种无人机高空投放装置及方法
- 一种适用于无人机高空投放高能燃烧销毁器的定向装置