自识别鱼体腹背朝向的鱼类去内脏加工智能化设备及方法
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及一种鱼类加工的机械设备和加工方法,具体来说是一种自识别鱼体腹背朝向的鱼类去内脏加工智能化设备及其方法,属于鱼类加工技术领域。
背景技术
鱼类加工机械是针对前处理过的原料鱼进行工厂再加工并且改变了其外形的各类加工机械设备。鱼类加工机械主要有:鱼体去头机、鱼体去内脏机、鱼体开片机、鱼体去皮机、鱼体剖切机、鱼体去鳍机和鱼体切断机等,由于其市场需求大以及丰富的使用功能,因此得到了人们越来越多的重视和生产实际应用。
鱼体去内脏机是将鱼腹剖切并去除鱼内脏的鱼类处理机械。鱼体去内脏机主要有输送带式和转台式2种类型,其主体结构由剖切刀具、去内脏工具、导向机构和鱼体输送装置等组成。国外的鱼类去内脏机,大多数采用先剖腹后去内脏的工艺方法,要么直接使用鱼体开片机剖切加工两片鱼肉的同时去除鱼骨和鱼内脏。德国Baader182型多工序鱼体处理机,就是一种加工大中型鱼类的典型一体化设备,它兼具切头、去脏和开片等多种功能。输送带式剖腹去内脏机,其剖腹刀具和去内脏刮轮安装在输送带的下面,鱼体先经过切头刀具切去鱼头,然后由导向机构引导鱼体处于剖切刀具和去内脏工具的正确位置处,进行剖腹和清除内脏。输送带式不剖腹去内脏机,配置的是带有锯齿刀刃的剪刀式切刀,只切断鱼头而不切断食道,在通过一对高速转动的圆锥形齿辊时,食道被夹入齿辊,将内脏从腹腔内快速拉出,抛出机外。转台式去内脏机剖切刀具和去内脏工具安装在转台的四周,操作时,将鱼体夹持在垂直或水平装置的转台圆周上随转台一起转动,依次进行切头、剖腹和去内脏。此外,还有一种应用真空抽吸原理的鱼类去内脏机,从切断鱼头的断面处插入吸管至鱼腹中将鱼内脏吸出。现有技术中针对鱼类加工的鱼类去内脏机多数存在如下缺点:复杂的价格昂贵但适用性差,结构简单的去内脏效果又很差,而且还需要人工再处理,生产效率低下,满足规模化生产需要的可靠且技术先进的鱼类去内脏加工设备很缺乏。
发明内容
本发明的目的是针对国内常见的大黄鱼、鲐鱼和鲈鱼、鲢鳙鱼等大宗经济性海淡水鱼,能够解决这类扁长体型特征鱼类,在没有腹背定向设备条件下的去头和不去头鱼的机械自动化去内脏加工的规模化生产效率和稳定可靠性的难题。
本发明采取以下技术方案:
一种自识别鱼体腹背朝向的鱼类去内脏加工智能化设备,在所述机座1的工作平台上依照直线布置方式顺次设置侧立输送式喂料装置2、鱼体腹背朝向智能识别装置3、夹持式鱼体输送装置4、剖腹去脏装置和检测报警装置8、喷淋水清洁系统9和出料装置10;所述剖腹去脏装置包括上、下对应设置或者上下分层前后错位设置的上置式剖腹去脏一体式联动组合装置7和下置式剖腹去脏一体式联动组合装置6,以及剖腹去脏联动执行与智控互锁装置5;所述下置式剖腹去脏一体式联动组合装置6和所述上置式剖腹去脏一体式联动组合装置7在所述剖腹去脏联动执行与智控互锁装置5控制下顺着导轨立柱联动上升、降低或置于待加工位置不动;当腹朝下背朝上的鱼体夹送到达鱼体剖腹去脏加工工位前,下置式剖腹去脏一体式联动组合装置6在其动力机构带动下快速上升至剖腹去脏加工高位,等到鱼体离开剖腹去脏加工工位后,下置式剖腹去脏一体式联动组合装置6快速向下复位;当腹朝上背朝下的鱼体夹送到达鱼体剖腹去脏加工工位前,上置式剖腹去脏一体式联动组合装置7在其动力机构带动下快速下降至剖腹去脏加工低位,等到鱼体离开剖腹去脏加工工位后,上置式剖腹去脏一体式联动组合装置7快速向上复位;所述下置式剖腹去脏一体式联动组合装置6、上置式剖腹去脏一体式联动组合装置7各自由一体式机架结构件整体支撑,所述一体式机架结构件上自前向后依次具有旋转圆盘刀装置、鱼腹壁自撑开装置、旋转去脏轮装置、旋转毛刷轮装置、压力水喷头装置,所述旋转圆盘刀装置用于将鱼腹剖开,所述鱼腹壁自撑开装置用于将剖开后的鱼腹撑开,所述旋转去脏轮装置用于对鱼腹腔去脏,所述旋转毛刷轮装置用于对鱼腹腔二次去脏、所述压力水喷头装置用于对鱼腹腔喷水清洗。
优选的,所述下置式剖腹去脏一体式联动组合装置6包括第一旋转圆盘刀装置6.1、第一鱼腹壁自撑开装置6.2、第一旋转去脏轮装置6.3、第一旋转毛刷轮装置6.4、第一压力水喷头装置6.5、第一一体式机架结构件6.6、第一动力传动机构和第一导轨式支撑固定装置A60,在所述第一导轨式支撑固定装置A60上设置第一智能化高度升降机构A60.1,所述第一鱼腹壁自撑开装置6.2设置在所述夹持式鱼体输送装置4的鱼体夹送带中间之下部空间位置处,所述第一鱼腹壁自撑开装置6.2前端为船头形状、中后部有矩形开口槽且兼具导向作用的长条形结构件,在所述长条形结构件中线对称的矩形开口槽中配合设置第一旋转去脏轮装置6.3、第一旋转毛刷轮装置6.4、第一压力水喷头装置6.5,所述第一旋转圆盘刀装置6.1前置于所述第一鱼腹壁自撑开装置6.2的外部。
优选的,所述上置式剖腹去脏一体式联动组合装置7包括第二旋转圆盘刀装置7.1、第二鱼腹壁自撑开装置7.2、第二旋转去脏轮装置7.3、第二旋转毛刷轮装置7.4、第二压力水喷头装置7.5、第二一体式机架结构件7.6、第二动力传动机构和第二导轨式支撑固定装置B70,在所述第二导轨式支撑固定装置B70上设置第二智能化高度升降机构B70.1,所述第二鱼腹壁自撑开装置7.2设置在所述夹持式鱼体输送装置4的鱼体夹送带中间之上部空间位置处,所述第二鱼腹壁自撑开装置7.2前端为船头形状、中后部有矩形开口槽且兼具导向作用的长条形结构件,在所述长条形结构件中线对称的矩形开口槽中配合设置第二旋转去脏轮装置7.3、第二旋转毛刷轮装置7.4、第二压力水喷头装置7.5,所述第二旋转圆盘刀装置7.1前置于所述第二鱼腹壁自撑开装置7.2的外部。
进一步的,腹朝下背朝上的鱼体或腹朝上背朝下的鱼体都将通过所述夹持式鱼体输送装置4连续输送至出料装置10后落入周转鱼筐或接料输送带;所述检测与报警装置8对于前道工序加工的鱼体进行检测和判别,对不合格加工鱼进行报警且由后续工序的剔除装置处理。
进一步的,所述鱼体腹背朝向智能识别装置4包括前置图像识别装置的图像采集器、特殊光源集成器及智能识别计算机系统,所述智能识别计算机系统包含了加工鱼类的体型特征参数数据库及其数学模型、实测鱼体图像信息和数据比对处理软件。
进一步的,所述剖腹去脏联动执行与智控互锁装置6包括所述下置式剖腹去脏一体式联动组合装置6和所述上置式剖腹去脏一体式联动组合装置7的联动执行程序智控系统、位置传感器、双联锁装置和联动避撞机构,所述双联锁装置是电子和机械结构的双重联锁或电子和液压系统的双重联锁。
一种自识别鱼体腹背朝向的鱼类去内脏加工智能化加工方法,采用上述任意一项所述的自识别鱼体腹背朝向的鱼类去内脏加工智能化加工设备;将头尾定向装置后的待加工鱼体以头在前尾在后的方式通过所述侧立输送式喂料装置2使得鱼体由平躺状态转为侧立状态连续前行,在经过所述鱼体腹背朝向智能识别装置3时获得鱼体腹背图像的采集和识别,其后连续输送至所述夹带式送料装置4的两根夹料环状胶带之间被夹裹前行,在到达所述下置式剖腹去脏一体式联动组合装置6和所述上置式剖腹去脏一体式联动组合装置7工位之前,得到所述剖腹去脏联动执行与智控互锁装置5的控制指令,当腹朝下背朝上的鱼体夹送过来时,所述下置式剖腹去脏一体式联动组合装置6就从待加工低位处快速上升到剖腹去脏加工高位处,等到鱼体剖腹去脏加工完成并且离开此工位后,又快速回降到原来的待加工低位处,同时,所述上置式剖腹去脏一体式联动组合装置7在上述腹朝下背朝上的鱼体剖腹去脏加工整个过程中位于其待加工高位处维持不动,与所述下置式剖腹去脏一体式联动组合装置6之间相互智控互锁不干涉;当腹朝上背朝下的鱼体夹送过来时,所述上置式剖腹去脏一体式联动组合装置7就从待加工高位处快速下降到剖腹去脏加工低位处,等到鱼体剖腹去脏加工完成并且离开此工位后,又快速回升到原来的待加工高位处,同时,所述下置式剖腹去脏一体式联动组合装置6在上述腹朝上背朝下的鱼体剖腹去脏加工整个过程中位于其待加工低位处维持不动,与所述上置式剖腹去脏一体式联动组合装置7之间相互智控互锁不干涉;上述去脏加工的腹朝下背朝上的鱼体或腹朝上背朝下的鱼体都将通过所述夹持式鱼体输送装置4连续输送至出料装置10后落入周转鱼筐或接料输送带;所述检测与报警装置8对于前道工序加工的鱼体进行检测和判别,对不合格加工鱼进行报警且由后续工序的剔除装置处理。
本发明的有益效果在于:
1)为中小型鱼类的连续加工和批量生产提供了高效的机械化设备和智能加工方法。
2)特别适用于没有腹背定向设备的小型化生产线,加工鱼的种类可以很广泛,对于去头鱼和不去头鱼的加工都适用。
3)加工设备中的剖腹去脏一体式联动组合装置,对于解决淡水鱼腹腔中的黑膜去除难题提供了有效的技术方法,能够明显提高鱼类加工产品的质量。
4)加工设备的机械化和智能化程度高,能够大大降低操作人员的劳动强度,能够减配生产员工,能够大幅度提高生产效率和经济效益。
5)通过智能识别,准确判定鱼体腹部的朝向,省略了鱼腹定向所需复杂的翻转机构,实现了智控与精准选取剖腹去脏装置中的上置式剖腹去脏一体式联动组合装置或下置式剖腹去脏一体式联动组合装置去执行去脏加工操作,能够大幅度提高去脏加工的可靠性和生产效率。
附图说明
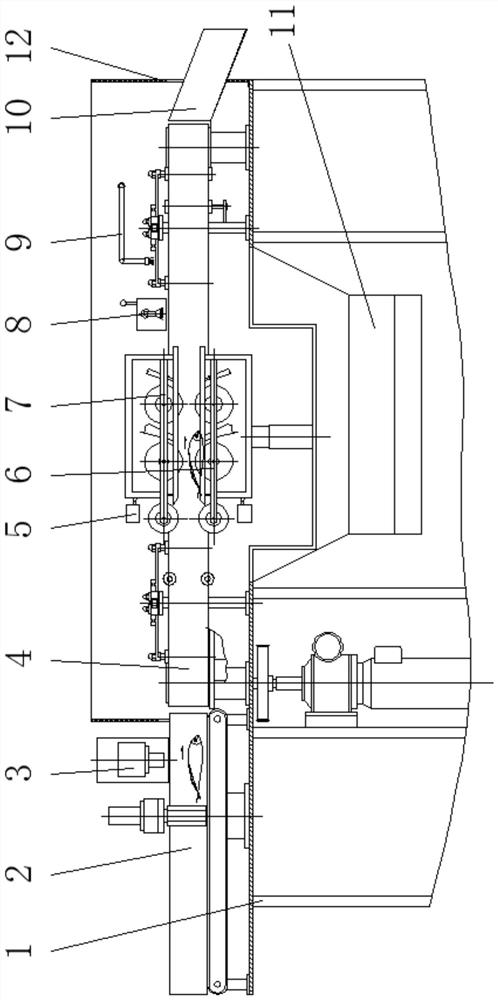
图1是本发明自识别鱼体腹背朝向的鱼类去内脏加工智能化设备的主视图。
图2是本发明自识别鱼体腹背朝向的鱼类去内脏加工智能化设备的局部俯视图。
图3是下置式剖腹去脏一体式联动组合装置的结构示意图。
图4是上置式剖腹去脏一体式联动组合装置的结构示意图。
图5是下置式剖腹去脏一体式联动组合装置和上置式剖腹去脏一体式联动组合装置的安装位置关系示意图。
图中:1.机座,2.(头尾已定向的)侧立输送式喂料装置,3.鱼体腹背朝向智能识别装置,4.夹持式鱼体(料)输送装置,5.剖腹去脏联动执行与智控互锁装置,6.下置式剖腹去脏一体式联动组合装置,6.1.第一旋转圆盘刀装置,6.2.第一鱼腹壁自撑开装置,6.3.第一旋转去脏轮装置,6.4.第一旋转毛刷轮装置,6.5.第一压力水喷头装置,6.6.第一一体式机架结构件,60.第一导轨式支撑固定装置A,60.1.第一智能化高度升降机构A,7.上置式剖腹去脏一体式联动组合装置,7.1.第二旋转圆盘刀装置,7.2.第二鱼腹壁自撑开装置,7.3.第二旋转去脏轮装置,7.4.第二旋转毛刷轮装置,7.5.第二压力水喷头装置,7.6.第二一体式机架结构件,70.第二导轨式支撑固定装置B,70.1.第二智能化高度升降机构B,8.检测与报警装置,9.喷淋水清洁系统,10.废弃物集排装置,11.出料装置,12.防护罩壳。
具体实施方式
下面结合附图和具体实施例对本发明进一步说明。
参见图1-图5,一种自识别鱼体腹背朝向的鱼类去内脏加工智能化设备,在所述机座1的工作平台上依照直线布置方式顺次设置侧立输送式喂料装置2、鱼体腹背朝向智能识别装置3、夹持式鱼体输送装置4、剖腹去脏装置和检测报警装置8、喷淋水清洁系统9和出料装置10;所述剖腹去脏装置包括上、下对应设置或者上下分层前后错位设置的上置式剖腹去脏一体式联动组合装置7和下置式剖腹去脏一体式联动组合装置6,以及剖腹去脏联动执行与智控互锁装置5;所述下置式剖腹去脏一体式联动组合装置6和所述上置式剖腹去脏一体式联动组合装置7在所述剖腹去脏联动执行与智控互锁装置5控制下顺着导轨立柱联动上升、降低或置于待加工位置不动;当腹朝下背朝上的鱼体夹送到达鱼体剖腹去脏加工工位前,下置式剖腹去脏一体式联动组合装置6在其动力机构带动下快速上升至剖腹去脏加工高位,等到鱼体离开剖腹去脏加工工位后,下置式剖腹去脏一体式联动组合装置6快速向下复位;当腹朝上背朝下的鱼体夹送到达鱼体剖腹去脏加工工位前,上置式剖腹去脏一体式联动组合装置7在其动力机构带动下快速下降至剖腹去脏加工低位,等到鱼体离开剖腹去脏加工工位后,上置式剖腹去脏一体式联动组合装置7快速向上复位;所述下置式剖腹去脏一体式联动组合装置6、上置式剖腹去脏一体式联动组合装置7各自由一体式机架结构件整体支撑,所述一体式机架结构件上自前向后依次具有旋转圆盘刀装置、鱼腹壁自撑开装置、旋转去脏轮装置、旋转毛刷轮装置、压力水喷头装置,所述旋转圆盘刀装置用于将鱼腹剖开,所述鱼腹壁自撑开装置用于将剖开后的鱼腹撑开,所述旋转去脏轮装置用于对鱼腹腔去脏,所述旋转毛刷轮装置用于对鱼腹腔二次去脏、所述压力水喷头装置用于对鱼腹腔喷水清洗。需要说明的是:上、下置式剖腹去脏一体式联动组合装置需要完成快速上升/下降,以及快速复位,可以避免相互之间的碰撞和干扰。
在此实施例中,参见图3,所述下置式剖腹去脏一体式联动组合装置6包括第一旋转圆盘刀装置6.1、第一鱼腹壁自撑开装置6.2、第一旋转去脏轮装置6.3、第一旋转毛刷轮装置6.4、第一压力水喷头装置6.5、第一一体式机架结构件6.6、第一动力传动机构和第一导轨式支撑固定装置A60,在所述第一导轨式支撑固定装置A60上设置第一智能化高度升降机构A60.1,所述第一鱼腹壁自撑开装置6.2设置在所述夹持式鱼体输送装置4的鱼体夹送带中间之下部空间位置处,所述第一鱼腹壁自撑开装置6.2前端为船头形状、中后部有矩形开口槽且兼具导向作用的长条形结构件,在所述长条形结构件中线对称的矩形开口槽中配合设置第一旋转去脏轮装置6.3、第一旋转毛刷轮装置6.4、第一压力水喷头装置6.5,所述第一旋转圆盘刀装置6.1前置于所述第一鱼腹壁自撑开装置6.2的外部。
在此实施例中,参见图4,所述上置式剖腹去脏一体式联动组合装置7包括第二旋转圆盘刀装置7.1、第二鱼腹壁自撑开装置7.2、第二旋转去脏轮装置7.3、第二旋转毛刷轮装置7.4、第二压力水喷头装置7.5、第二一体式机架结构件7.6、第二动力传动机构和第二导轨式支撑固定装置B70,在所述第二导轨式支撑固定装置B70上设置第二智能化高度升降机构B70.1,所述第二鱼腹壁自撑开装置7.2设置在所述夹持式鱼体输送装置4的鱼体夹送带中间之上部空间位置处,所述第二鱼腹壁自撑开装置7.2前端为船头形状、中后部有矩形开口槽且兼具导向作用的长条形结构件,在所述长条形结构件中线对称的矩形开口槽中配合设置第二旋转去脏轮装置7.3、第二旋转毛刷轮装置7.4、第二压力水喷头装置7.5,所述第二旋转圆盘刀装置7.1前置于所述第二鱼腹壁自撑开装置7.2的外部。
在此实施例中,参见图1,腹朝下背朝上的鱼体或腹朝上背朝下的鱼体都将通过所述夹持式鱼体输送装置4连续输送至出料装置10后落入周转鱼筐或接料输送带;所述检测与报警装置8对于前道工序加工的鱼体进行检测和判别,对不合格加工鱼进行报警且由后续工序的剔除装置处理。
在此实施例中,所述鱼体腹背朝向智能识别装置4包括前置图像识别装置的图像采集器、特殊光源集成器及智能识别计算机系统,所述智能识别计算机系统包含了加工鱼类的体型特征参数数据库及其数学模型、实测鱼体图像信息和数据比对处理软件。
在此实施例中,所述剖腹去脏联动执行与智控互锁装置6包括所述下置式剖腹去脏一体式联动组合装置6和所述上置式剖腹去脏一体式联动组合装置7的联动执行程序智控系统、位置传感器、双联锁装置和联动避撞机构,所述双联锁装置是电子和机械结构的双重联锁或电子和液压系统的双重联锁。
本自识别鱼体腹背朝向的鱼类去内脏加工智能化加工设备工作时,包括以下步骤:将头尾定向装置后的待加工鱼体以头在前尾在后的方式通过所述侧立输送式喂料装置2使得鱼体由平躺状态转为侧立状态连续前行,在经过所述鱼体腹背朝向智能识别装置3时获得鱼体腹背图像的采集和识别,其后连续输送至所述夹带式送料装置4的两根夹料环状胶带之间被夹裹前行,在到达所述下置式剖腹去脏一体式联动组合装置6和所述上置式剖腹去脏一体式联动组合装置7工位之前,得到所述剖腹去脏联动执行与智控互锁装置5的控制指令,当腹朝下背朝上的鱼体夹送过来时,所述下置式剖腹去脏一体式联动组合装置6就从待加工低位处快速上升到剖腹去脏加工高位处,等到鱼体剖腹去脏加工完成并且离开此工位后,又快速回降到原来的待加工低位处,同时,所述上置式剖腹去脏一体式联动组合装置7在上述腹朝下背朝上的鱼体剖腹去脏加工整个过程中位于其待加工高位处维持不动,与所述下置式剖腹去脏一体式联动组合装置6之间相互智控互锁不干涉;当腹朝上背朝下的鱼体夹送过来时,所述上置式剖腹去脏一体式联动组合装置7就从待加工高位处快速下降到剖腹去脏加工低位处,等到鱼体剖腹去脏加工完成并且离开此工位后,又快速回升到原来的待加工高位处,同时,所述下置式剖腹去脏一体式联动组合装置6在上述腹朝上背朝下的鱼体剖腹去脏加工整个过程中位于其待加工低位处维持不动,与所述上置式剖腹去脏一体式联动组合装置7之间相互智控互锁不干涉;上述去脏加工的腹朝下背朝上的鱼体或腹朝上背朝下的鱼体都将通过所述夹持式鱼体输送装置4连续输送至出料装置10后落入周转鱼筐或接料输送带;所述检测与报警装置8对于前道工序加工的鱼体进行检测和判别,对不合格加工鱼进行报警且由后续工序的剔除装置处理。
以上是本发明的优选实施例,本领域普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本发明总的构思的前提下,这些变换或改进都应当属于本发明要求保护的范围之内。
- 自识别鱼体腹背朝向的鱼类去内脏加工智能化设备及方法
- 一种先鱼尾顺次的鱼类去内脏加工方法及智能化加工设备