一种潮滩数字高程模型构建方法及系统
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及数字模型构建领域,特别是涉及一种潮滩数字高程模型构建方法及系统。
背景技术
淤泥质潮滩通常指平均大潮高潮线与平均大潮低潮线之间的地带,也称潮间带。在我国约有四分之一的海岸属于淤泥质海岸,获取淤泥质潮滩地形对研究岸线变迁、海岸带生态变化及沿海工程建设有着重要意义。淤泥质潮滩受波浪、泥沙、沿岸流、地质等诸多因素的影响,具有面积宽广、水浅滩平、变化频繁的特点,使得该区域的地面调查与地形测绘的难度较大、成本较高,且存在一定风险。遥感技术具有高时效、大范围、高频率的特点,利用多期遥感水边线复合潮位数据构建潮滩数字高程模型(DEM),成为获取大范围淤泥质潮滩地形信息的有效途径。
遥感水边线是卫星过境时获取的瞬时水边线,准确提取水边线是潮滩DEM构建的关键。现有的水边线提取方法主要有:边缘检测法、阈值分割法、区域生长法、主动轮廓模型法、面向对象分类等。Mason等基于ERSSAR影像,通过纹理分割提取多期水边线,应用水动力模型对水边线高程进行赋值,构建了英国东岸Humber/Wash区域潮滩DEM;沈芳等基于LandsatTM影像,对比了不同波段的水边线提取精度,利用阈值分割法提取水边线,通过潮汐预测数据插值对水边线赋值,构建了长江口九段沙DEM;穆敬等基于BJ-1影像,利用面向对象分类法提取水边线,通过潮汐网格数据对水边线赋值,构建了黄骅市潮滩DEM。目前国内外学者在构建潮滩DEM的研究中大多关注于准确模拟水边线的瞬时潮位和提升单一方法的水边线提取精度。但是,瞬时水边线受卫星过境时的潮情、天气以及滩面等因素的影响,在影像中的光谱与纹理差异较大,基于单一方法提取水边线,难以保证水边线的提取精度,从而影响潮滩DEM反演结果。吴迪等虽提出了基于多源多算法的水边线提取模型,但未对水边线进行系统划分,水边线提取的精度低,且没有将其应用于潮滩DEM构建研究。
发明内容
针对现有技术中存在的不足,本发明的目的是提供一种潮滩数字高程模型构建方法及系统,能够基于潮汐数据对水边线进行分类,并根据分类结果基于多算法对不同类型的水边线进行提取,提高了水边线的提取精度,从而提高了构建潮滩DEM的精确程度。
为实现上述目的,本发明提供了如下方案:
一种潮滩数字高程模型构建方法,包括:
获取潮滩区域在各个时刻的遥感影像和潮汐数据;
对于任意时刻的潮滩区域,根据所述潮汐数据和所述遥感影像确定潮滩区域的水边线;所述水边线为单一滩面弱边缘水边线、复杂滩面弱边缘水边线、单一滩面强边缘水边线或复杂滩面强边缘水边线;
当所述水边线为单一滩面强边缘水边线时,根据边缘检测算法对所述单一滩面强边缘水边线进行提取,得到水边线特征;
当所述水边线为单一滩面弱边缘水边线时,根据阈值分割算法对所述单一滩面弱边缘水边线进行提取,得到水边线特征;
当所述水边线为复杂滩面强边缘水边线时,根据面向对象法对所述复杂滩面强边缘水边线进行提取,得到水边线特征;
当所述水边线为复杂滩面弱边缘水边线时,根据分水岭算法对复杂滩面弱边缘水边线进行提取,得到水边线特征;
根据所有时刻的水边线特征构建潮滩数字高程模型。
优选地,在获取潮滩区域的各个时期的的遥感影像和潮汐数据之后,还包括:
对所述遥感影像进行数据预处理;
所述预处理包括绝对辐射定标、几何精校正及区域裁剪。
优选地,所述根据所述潮汐数据和所述遥感影像确定潮滩区域的水边线,包括:
通过人工目视对所述遥感影像进行判断;
若所述遥感影像中存在薄云或雾,则所述遥感影像为云雾影像,并将所述潮滩区域的水边线确定为弱边缘水边线;
若不存在薄云或雾,则所述遥感影像为晴朗影像,并通过所述潮汐数据确定所述遥感影像的潮情;若所述遥感影像所处的当前时刻为落潮,则将所述潮滩区域的水边线确定为弱边缘水边线;若所述遥感影像所处的当前时刻为涨潮,则判断所述遥感影像中的潮滩表面是否存在残余水,若存在残余水,则将所述潮滩区域的水边线确定为弱边缘水边线;若不存在残余水,则将所述潮滩区域的水边线确定为强边缘水边线;
判断所述潮滩区域的水边线所处的区域为近岸区域还是近海区域;
若所述潮滩区域的水边线为所述弱边缘水边线且处于近岸区域时,则确定所述潮滩区域的滩面特征为复杂滩面,并将所述弱边缘水边线确定为复杂弱边缘水边线;
若所述潮滩区域的水边线为所述弱边缘水边线且处于近海区域时,则确定所述潮滩区域的滩面特征为单一滩面,并将所述弱边缘水边线确定为单一弱边缘水边线;
若所述潮滩区域的水边线为所述强边缘水边线且处于近岸区域时,则确定所述潮滩区域的滩面特征为复杂滩面,并将所述强边缘水边线确定为复杂强边缘水边线;
若所述潮滩区域的水边线为所述强边缘水边线且处于近海区域时,则确定所述潮滩区域的滩面特征为单一滩面,并将所述强边缘水边线确定为单一强边缘水边线。
优选地,所述判断所述潮滩区域的水边线所处的区域为近岸区域还是近海区域,具体包括:
若所述潮滩区域对应的遥感影像在当前时刻的潮位平均值大于历史总潮位平均值,则确定所述潮滩区域的水边线所处的区域为近岸区域;若所述潮滩区域对应的遥感影像在当前时刻的潮位平均值小于或等于历史总潮位平均值,则确定所述潮滩区域的水边线所处的区域为近海区域;所述潮位平均值为遥感影像在当前时刻的上一整时刻和下一整时刻的潮位平均值;所述历史总潮位平均值为历史潮位数据中在当前时刻的上一整时刻和下一整时刻的总潮位平均值。
优选地,根据分水岭算法对复杂滩面弱边缘水边线进行提取,得到水边线特征,包括:
对所述遥感影像依次进行归一化水体指数和低通滤波处理;
对低通滤波后的影像依次进行二值化处理和数学形态学处理;
在数学形态学处理后的影像中的潮滩和水体的边界处做缓冲区处理,生成待分割区域的标记信息;
将所述遥感影像进行图像变换,得到432假彩色图像;
通过所述432假彩色图像结合所述标记信息进行分水岭分割,提取所述复杂滩面弱边缘水边线的水边线特征。
优选地,根据所有时刻的水边线特征构建潮滩数字高程模型,包括:
根据潮汐预测数据采用多项式插值法计算所述水边线特征的瞬时潮位;所述潮汐预测数据为对所述潮汐数据通过调和分析法推算得到的预测潮位值;
依次按照单一滩面强边缘水边线、复杂滩面强边缘水边线、单一滩面弱边缘水边线和复杂滩面弱边缘水边线的顺序筛选所述水边线特征;
将筛选后的所述水边线特征重采样为水边点,采用不规则三角网对所述水边点进行空间插值,得到插值结果;
将所述插值结果和所述瞬时潮位从潮高基准面转换为以WGS84为基准的高程数据;
根据所述高程数据构建潮滩数字高程模型。
一种潮滩数字高程模型构建系统,包括:
获取模块,用于获取潮滩区域在各个时刻的遥感影像和潮汐数据;
水边线确定模块,用于在任意时刻的潮滩区域内,根据所述潮汐数据和所述遥感影像确定潮滩区域的水边线;所述水边线为单一滩面弱边缘水边线、复杂滩面弱边缘水边线、单一滩面强边缘水边线或复杂滩面强边缘水边线;
第一提取模块,用于当所述水边线为单一滩面强边缘水边线时,根据边缘检测算法对所述单一滩面强边缘水边线进行提取,得到水边线特征;
第二提取模块,用于当所述水边线为单一滩面弱边缘水边线时,根据阈值分割算法对所述单一滩面弱边缘水边线进行提取,得到水边线特征;
第三提取模块,用于当所述水边线为复杂滩面强边缘水边线时,根据面向对象法对所述复杂滩面强边缘水边线进行提取,得到水边线特征;
第四提取模块,用于当所述水边线为复杂滩面弱边缘水边线时,根据分水岭算法对复杂滩面弱边缘水边线进行提取,得到水边线特征;
模型构建模块,用于根据所有时刻的水边线特征构建潮滩数字高程模型。
优选地,在所述获取模块之后,还包括:
预处理模块,用于对所述遥感影像进行数据预处理;所述预处理包括绝对辐射定标、几何精校正及区域裁剪。
优选地,所述水边线确定模块具体包括:
第一判断单元,用于通过人工目视对所述遥感影像进行判断;若所述遥感影像中存在薄云或雾,则所述遥感影像为云雾影像,并将所述潮滩区域的水边线确定为弱边缘水边线;若不存在薄云或雾,则所述遥感影像为晴朗影像,并通过所述潮汐数据确定所述遥感影像的潮情;若所述遥感影像所处的当前时刻为落潮,则将所述潮滩区域的水边线确定为弱边缘水边线;若所述遥感影像所处的当前时刻为涨潮,则判断所述遥感影像中的潮滩表面是否存在残余水,若存在残余水,则将所述潮滩区域的水边线确定为弱边缘水边线;若不存在残余水,则将所述潮滩区域的水边线确定为强边缘水边线;
第二判断单元,用于判断所述潮滩区域的水边线所处的区域为近岸区域还是近海区域;若所述潮滩区域的水边线为所述弱边缘水边线且处于近岸区域时,则确定所述潮滩区域的滩面特征为复杂滩面,并将所述弱边缘水边线确定为复杂弱边缘水边线;若所述潮滩区域的水边线为所述弱边缘水边线且处于近海区域时,则确定所述潮滩区域的滩面特征为单一滩面,并将所述弱边缘水边线确定为单一弱边缘水边线;若所述潮滩区域的水边线为所述强边缘水边线且处于近岸区域时,则确定所述潮滩区域的滩面特征为复杂滩面,并将所述强边缘水边线确定为复杂强边缘水边线;若所述潮滩区域的水边线为所述强边缘水边线且处于近海区域时,则确定所述潮滩区域的滩面特征为单一滩面,并将所述强边缘水边线确定为单一强边缘水边线。
优选地,所述第二判断单元具体包括:
近岸区域确定子单元,用于若所述潮滩区域对应的遥感影像在当前时刻的潮位平均值大于历史总潮位平均值时,确定所述潮滩区域的水边线所处的区域为近岸区域;
近海区域确定子单元,用于若所述潮滩区域对应的遥感影像在当前时刻的潮位平均值小于或等于历史总潮位平均值时,确定所述潮滩区域的水边线所处的区域为近海区域;所述潮位平均值为遥感影像在当前时刻的上一整时刻和下一整时刻的潮位平均值;所述历史总潮位平均值为历史潮位数据中在当前时刻的上一整时刻和下一整时刻的总潮位平均值。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明提供了潮滩数字高程模型构建方法及系统,分析了不同潮情下水边线的边缘类型,并基于潮汐数据对水边线进行分类,将研究数据中的水边线分为:单一弱边缘水边线、复杂弱边缘水边线、单一强边缘水边线与复杂强边缘水边线4种类型,并基于多算法提取水边线特征,通过潮汐预测数据插值获得多期水边线瞬时潮位,并根据水边线类别进一步筛选,从而根据瞬时潮位和水边线特征构建潮滩数字高程模型。研究区潮滩数字高程模型反演结果精度较高,可准确反映潮滩的近似地形,本发明的方法或系统,可有效用于潮滩地形信息的获取。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
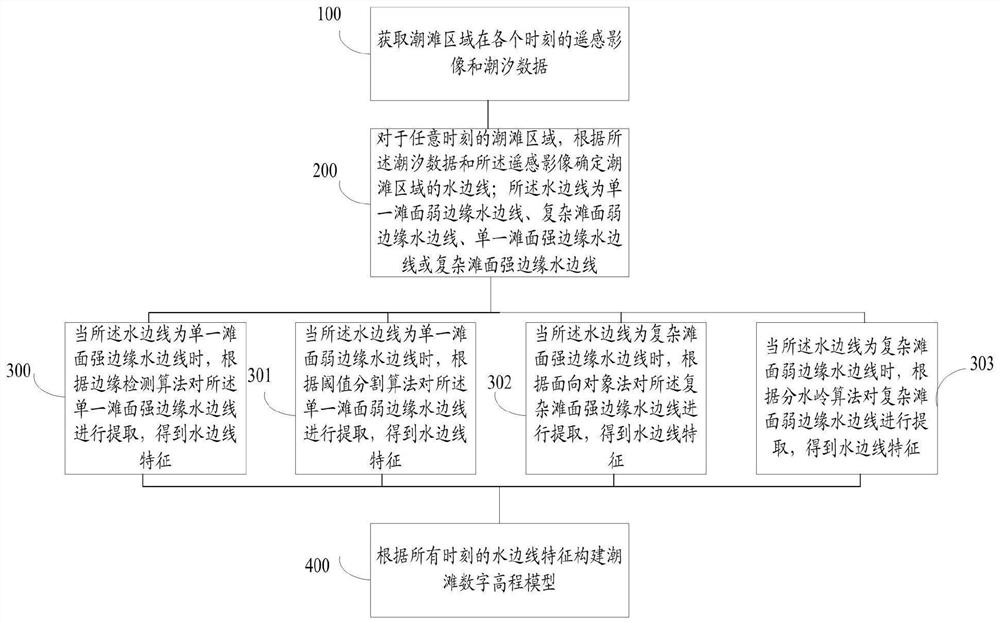
图1为本发明潮滩数字高程模型构建方法的方法流程图;
图2为本发明提供的实施例中的具体分类规则示意图;
图3为本发明提供的实施例中的改进分水岭算法流程图;
图4为本发明提供的实施例中的验证点分布图;
图5为本发明提供的实施例中的相关性分析图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种潮滩数字高程模型构建方法及系统,能够基于潮汐数据对水边线进行分类,并根据分类结果基于多算法对不同类型的水边线进行提取,提高了水边线的提取精度,从而提高了构建潮滩DEM的精确程度。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明潮滩数字高程模型构建方法的方法流程图,如图1所示,所述方法包括:
步骤100:获取潮滩区域在各个时刻的遥感影像和潮汐数据。
步骤200:对于任意时刻的潮滩区域,根据所述潮汐数据和所述遥感影像确定潮滩区域的水边线;所述水边线为单一滩面弱边缘水边线、复杂滩面弱边缘水边线、单一滩面强边缘水边线或复杂滩面强边缘水边线。
步骤300:当所述水边线为单一滩面强边缘水边线时,根据边缘检测算法对所述单一滩面强边缘水边线进行提取,得到水边线特征。
步骤301:当所述水边线为单一滩面弱边缘水边线时,根据阈值分割算法对所述单一滩面弱边缘水边线进行提取,得到水边线特征。
步骤302:当所述水边线为复杂滩面强边缘水边线时,根据面向对象法对所述复杂滩面强边缘水边线进行提取,得到水边线特征。
步骤303:当所述水边线为复杂滩面弱边缘水边线时,根据分水岭算法对复杂滩面弱边缘水边线进行提取,得到水边线特征。
步骤400:根据所有时刻的水边线特征构建潮滩数字高程模型。
优选地,在获取潮滩区域的各个时期的的遥感影像和潮汐数据之后,还包括:
对所述遥感影像进行数据预处理。
所述预处理包括绝对辐射定标、几何精校正及区域裁剪。
具体的,所述几何精校正误差控制在0.5个像元以内。
作为一种可选的实施方式,所述遥感数据选用GF1-WFV数据,空间分辨率为16m,重访周期为2d,幅宽为800km。
优选地,所述根据所述潮汐数据和所述遥感影像确定潮滩区域的水边线,包括:
通过人工目视对所述遥感影像进行判断。
若所述遥感影像中存在薄云或雾,则所述遥感影像为云雾影像,并将所述潮滩区域的水边线确定为弱边缘水边线。
若不存在薄云或雾,则所述遥感影像为晴朗影像,并通过所述潮汐数据确定所述遥感影像的潮情;若所述遥感影像所处的当前时刻为落潮,则将所述潮滩区域的水边线确定为弱边缘水边线;若所述遥感影像所处的当前时刻为涨潮,则判断所述遥感影像中的潮滩表面是否存在残余水,若存在残余水,则将所述潮滩区域的水边线确定为弱边缘水边线;若不存在残余水,则将所述潮滩区域的水边线确定为强边缘水边线。
判断所述潮滩区域的水边线所处的区域为近岸区域还是近海区域。
若所述潮滩区域的水边线为所述弱边缘水边线且处于近岸区域时,则确定所述潮滩区域的滩面特征为复杂滩面,并将所述弱边缘水边线确定为复杂弱边缘水边线。
若所述潮滩区域的水边线为所述弱边缘水边线且处于近海区域时,则确定所述潮滩区域的滩面特征为单一滩面,并将所述弱边缘水边线确定为单一弱边缘水边线。
若所述潮滩区域的水边线为所述强边缘水边线且处于近岸区域时,则确定所述潮滩区域的滩面特征为复杂滩面,并将所述强边缘水边线确定为复杂强边缘水边线。
若所述潮滩区域的水边线为所述强边缘水边线且处于近海区域时,则确定所述潮滩区域的滩面特征为单一滩面,并将所述强边缘水边线确定为单一强边缘水边线。
图2为本发明提供的实施例中的具体分类规则示意图,如图2所示,本发明实施例中,影像中的薄云或雾明显削弱灰度变化梯度,因此通过人工目视对影像质量进行判断,将包含薄云或雾影像的水边线分为弱边缘水边线;通过分析潮汐数据对晴朗影像的水边线进行划分。若H(10)、H(11)、H(12)三个时刻的潮位依次升高,则瞬时潮情(11~12时之间)为涨潮,滩面不存在残余水的影响,则水边线划分为强边缘水边线,若三个时刻的潮位依次下降(落潮)或10时的潮位高于11时潮位,则存在滩面残余水或水中泥沙的影响,划分为弱边缘水边线。
获得强、弱边缘水边线后,按潮位高低对水边线所在滩面特征分类:若水边线获取当日的11时与12时的平均潮位高于多期平均值H,则该期水边线近岸,对应复杂滩面;若低于或等于多期平均值H则该期水边线近海,对应单一滩面。最后得到4类水边线分别为:单一弱边缘水边线、复杂弱边缘水边线、单一强边缘水边线与复杂强边缘水边线。以影像为单位对本文所用的GF1影像的水边线进行分类,分类结果如表1所示,表1为水边线分类结果。
表1
具体的,水边线两侧水陆区域的灰度变化梯度主要受涨落潮的影响:涨潮时滩面干湿分明,水边线两侧区域灰度差异显著;落潮时受滩面残余水和水中泥沙影响,水边线两侧灰度差异较小。因此按灰度变化梯度,边缘类型可分为强边缘与弱边缘。水边线的邻域噪声水平,主要由潮位高低决定:由于滩面地物种类由近海向内陆逐渐增多,高潮位时水边线在潮沟、植被、建筑分布较多的近岸区域,滩面破碎复杂,邻域内噪声较高;低潮位时水边线近海,滩面相对均质单一。
优选地,所述判断所述潮滩区域的水边线所处的区域为近岸区域还是近海区域,具体包括:
若所述潮滩区域对应的遥感影像所处的当前时刻的潮位平均值大于历史总潮位平均值,则确定所述潮滩区域的水边线所处的区域为近岸区域;若所述潮滩区域对应的遥感影像所处的当前时刻的潮位平均值小于或等于历史总潮位平均值,则确定所述潮滩区域的水边线所处的区域为近海区域;所述潮位平均值为遥感影像所处的时刻的上一整时刻和下一整时刻的潮位平均值;所述历史总潮位平均值为历史潮位数据中当前时刻的上一整时刻和下一整时刻的总潮位平均值。
具体的,所述总潮位平均值为多组历史潮位数据中在遥感影像所处的时刻的上一整时刻和下一整时刻的潮位平均值。
可选地,步骤300中的边缘检测算法是基于图像灰度的一阶或二阶导数来提取图像中灰度急剧变化的区域边界,具有模型参数少、运行速度快的优点,但对噪声敏感,在复杂滩面提取的水边线存在严重的毛刺或不连续。本发明选择定位准确度高、单边响应良好的Canny边缘检测算法。
具体的,步骤301中的阈值分割算法,通过设定阈值,如归一化水体指数(NDWI),可以快速有效地区分水陆区域,但对于高潮位的复杂滩面,受潮沟或其它积水区域的影响,水边线提取不准确,因此,本发明通过阈值分割提取单一滩面弱边缘水边线。具体的,首先,计算NDWI,增强影像中的水体信息,计算公式如下:
式中,Green与NIR分别代表GF1-WFV影像中的绿波段与近红外波段的反射率,NDWI的取值范围为[-1,1];然后,通过OTSU算法计算阈值,对NDWI灰度影像进行二值化;最后对二值图做开运算处理,对边界进行平滑,得到水边线特征。
可选地,步骤302中的面向对象法是通过影像中的光谱信息、空间信息和纹理信息对影像进行分割,然后以分割后的对象为基本单元进行分类,从而提取水边线的一种方法。面向对象法具有较强的抗噪能力,有效抑制复杂滩面上其它地物的影响,可准确保留强边缘水边线的细节信息,但该方法对纹理变化过于敏感,提取的弱边缘水边线不平滑,因此,本发明通过面向对象法提取复杂滩面强边缘水边线。首先,通过多尺度分割将影像分割为多个对象,然后根据各个对象的光谱相似度进行合并,多次迭代后最终得到水边线特征。
优选地,根据分水岭算法对复杂滩面弱边缘水边线进行提取,得到水边线特征,包括:
对所述遥感影像依次进行归一化水体指数和低通滤波处理。
对低通滤波后的影像依次进行二值化处理和数学形态学处理。
在数学形态学处理后的影像中的潮滩和水体的边界处做缓冲区处理,生成待分割区域的标记信息。
将所述遥感影像进行图像变换,得到432假彩色图像。
通过所述432假彩色图像结合所述标记信息进行分水岭分割,提取所述复杂滩面弱边缘水边线的水边线特征。
图3为提供的实施例中的改进分水岭算法流程图,如图3所示,分水岭算法是一种常用的图像分割算法,具有计算速度较快、提取边界连续闭合、对弱边缘响应良好的特点,但对噪声敏感,过分割与欠分割现象严重。通过对待分割区域的标记,可有效避免过分割与欠分割现象的发生。本发明首先通过低通滤波、数学形态学处理等操作,提取水陆分界区域作为标记信息,达到抑制复杂滩面噪声的效果,然后基于分水岭分割提取标记区域内的水边线。这种改进分水岭算法相对复杂,但对于复杂滩面弱边缘水边线的提取精度较高。对影像NDWI低通滤波去除高频噪声后,潮滩上的潮沟、河口处的沙洲及较小的人工建筑均已去除;二值化处理后通过数学形态学处理,将盐田、河流等内陆水体完全去除,在边界处做缓冲区处理,生成待分割区域的标记信息;利用原始影像432假彩色图像结合标记信息进行分水岭分割,得到水边线特征。
优选地,根据所有时刻的水边线特征构建潮滩数字高程模型,包括:
根据潮汐预测数据采用多项式插值法计算所述水边线特征的瞬时潮位;所述潮汐预测数据为对所述潮汐数据通过调和分析法推算得到的预测潮位值。
依次按照单一滩面强边缘水边线、复杂滩面强边缘水边线、单一滩面弱边缘水边线和复杂滩面弱边缘水边线的顺序筛选所述水边线特征。
将筛选后的所述水边线特征重采样为水边点,采用不规则三角网对所述水边点进行空间插值,得到插值结果。
将所述插值结果和所述瞬时潮位从潮高基准面转换为以WGS84为基准的高程数据。
根据所述高程数据构建潮滩数字高程模型。
本发明所用GF1-WFV数据的获取时间均在每日上午11时到12时之间,利用10时到13时的4个整时潮位值构建三次多项式,若在10时到13时之间存在潮位极值,则用潮位极值替代距影像获取时间较远的整时潮位值,通过多项式插值计算水边线的瞬时潮位。在研究资料有限时,这是一种行而有效的方法,水边线对应瞬时潮位如表2,表2为水边线瞬时潮位。
表2
受滩面上潮沟或河流入海口处泥沙的影响,提取的多期水边线在局部存在交叉或重叠的现象。针对上述问题,本发明按照单一滩面强边缘、复杂滩面强边缘、单一滩面弱边缘和复杂滩面弱边缘的优先顺序选用水边线,将筛选后的水边线重采样为16m×16m的水边点,利用不规则三角网进行空间插值,并将插值结果和瞬时潮位从潮高基准面转换为以WGS84为基准的高程数据,得到潮滩DEM反演结果。
具体的,滩面单一、水边线边缘信息明显的,所用算法简单稳定,提取精度最高,优先选择,滩面复杂且水边线边缘信息不明显的算法提取精度最差,放在最后,然后考虑强边缘的提取算法相对弱边缘的简单,算法鲁棒性好,所以优先考虑2种强边缘的提取结果。
图4为本发明提供的实施例中的验证点分布图,如图4所示,为验证所述方法有效性,本发明利用野外实测高程数据对潮滩DEM反演结果进行精度评价。实测高程数据获取时间为2017年12月,采用TrimbleR5GPS接收机测量,静态观测不少于20分钟。实测高程数据通过精密星历解算为WGS84坐标数据,验证点共计18个。
图5为本发明提供的实施例中的相关性分析图,如图5所示,对实测高程与反演结果进行相关分析,实测高程与对应DEM反演结果的相关性较高,R
本发明还提供一种潮滩数字高程模型构建系统,包括:
获取模块,用于获取潮滩区域在各个时刻的遥感影像和潮汐数据。
水边线确定模块,用于在任意时刻的潮滩区域内,根据所述潮汐数据和所述遥感影像确定潮滩区域的水边线;所述水边线为单一滩面弱边缘水边线、复杂滩面弱边缘水边线、单一滩面强边缘水边线或复杂滩面强边缘水边线。
第一提取模块,用于当所述水边线为单一滩面强边缘水边线时,根据边缘检测算法对所述单一滩面强边缘水边线进行提取,得到水边线特征。
第二提取模块,用于当所述水边线为单一滩面弱边缘水边线时,根据阈值分割算法对所述单一滩面弱边缘水边线进行提取,得到水边线特征。
第三提取模块,用于当所述水边线为复杂滩面强边缘水边线时,根据面向对象法对所述复杂滩面强边缘水边线进行提取,得到水边线特征。
第四提取模块,用于当所述水边线为复杂滩面弱边缘水边线时,根据改进分水岭算法对复杂滩面弱边缘水边线进行提取,得到水边线特征。
模型构建模块,用于根据所有时刻的水边线特征构建潮滩数字高程模型
优选地,还包括:
预处理模块,用于对所述遥感影像进行数据预处理;所述预处理包括绝对辐射定标、几何精校正及区域裁剪。
优选地,所述水边线确定模块具体包括:
第一判断单元,用于通过人工目视对所述遥感影像进行判断;若所述遥感影像中存在薄云或雾,则所述遥感影像为云雾影像,并将所述潮滩区域的水边线确定为弱边缘水边线;若不存在薄云或雾,则所述遥感影像为晴朗影像,并通过所述潮汐数据确定所述遥感影像的潮情;若所述遥感影像所处的当前时刻为落潮,则将所述潮滩区域的水边线确定为弱边缘水边线;若所述遥感影像所处的当前时刻为涨潮,则判断所述遥感影像中的潮滩表面是否存在残余水,若存在残余水,则将所述潮滩区域的水边线确定为弱边缘水边线;若不存在残余水,则将所述潮滩区域的水边线确定为强边缘水边线。
第二判断单元,用于判断所述潮滩区域的水边线所处的区域为近岸区域还是近海区域;若所述潮滩区域的水边线为所述弱边缘水边线且处于近岸区域时,所述潮滩区域的滩面特征为复杂滩面,则将所述弱边缘水边线确定为复杂弱边缘水边线;若所述潮滩区域的水边线为所述弱边缘水边线且处于近海区域时,所述潮滩区域的滩面特征为单一滩面,则将所述弱边缘水边线确定为单一弱边缘水边线;若所述潮滩区域的水边线为所述强边缘水边线且处于近岸区域时,所述潮滩区域的滩面特征为复杂滩面,则将所述强边缘水边线确定为复杂强边缘水边线;若所述潮滩区域的水边线为所述强边缘水边线且处于近海区域时,所述潮滩区域的滩面特征为单一滩面,则将所述强边缘水边线确定为单一强边缘水边线。
优选地,所述第二判断单元具体包括:
近岸区域确定子单元,用于若所述潮滩区域对应的遥感影像所处的当前时刻的潮位平均值大于历史总潮位平均值时,确定所述潮滩区域的水边线所处的区域为近岸区域。
近海区域确定子单元,用于若所述潮滩区域对应的遥感影像所处的当前时刻的潮位平均值小于或等于历史总潮位平均值时,确定所述潮滩区域的水边线所处的区域为近海区域;所述潮位平均值为遥感影像所处的时刻的上一整时刻和下一整时刻的潮位平均值;所述历史总潮位平均值为历史潮位数据中当前时刻的上一整时刻和下一整时刻的总潮位平均值。
本发明的有益效果如下:
(1)本发明分析了不同潮情下水边线的边缘类型与滩面噪声的差异,并基于潮汐数据对水边线进行分类,将研究数据中的多期水边线分为:单一弱边缘水边线、复杂弱边缘水边线、单一强边缘水边线与复杂强边缘水边线4种类型,该结果可进一步用于水边线提取与潮滩DEM构建。
(2)本发明基于多算法提取水边线,通过潮汐预测数据插值获得多期水边线瞬时潮位,并根据水边线类别进一步筛选,构建了潮滩DEM。研究区DEM反演结果精度较高,可准确反映潮滩的近似地形,方法可有效用于潮滩地形信息的获取。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种潮滩数字高程模型构建方法及系统
- 一种基于数字高程模型构建河道数据的方法