一种快速大范围语义地图构建方法
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及地图构建技术领域,特别涉及一种快速大范围语义地图构建方法。
背景技术
针对解决面向机场、高铁站、大型展览馆等大范围复杂动态室内场景下的快速大范围语义地图构建关键技术问题。拟从机器学习的角度出发,提出在包含动态移动物体的大型室内环境下,适用于服务机器人的环境建图与导航定位方法。
发明内容
针对现有技术的不足之处本发明提供一种快速大范围语义地图构建方法,本发明的具体技术方案如下:
一种快速大范围语义地图构建方法,包括以下步骤:
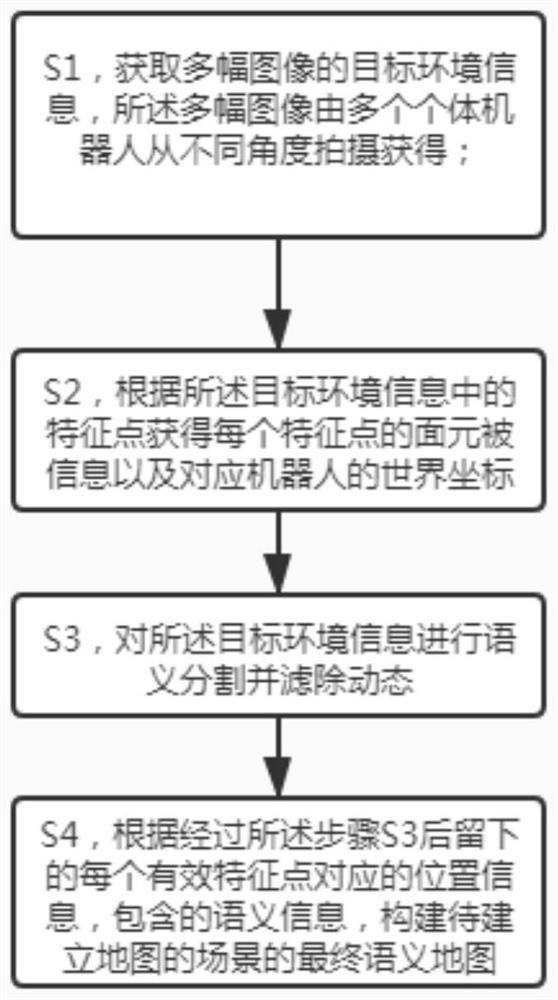
S1,获取多幅图像的目标环境信息,所述多幅图像由多个个体机器人从不同角度拍摄获得;
S2,根据所述目标环境信息中的特征点获得每个特征点的面元被信息以及对应机器人的世界坐标;
S3,对所述目标环境信息进行语义分割并滤除动态;
S4,根据经过所述步骤S3后留下的每个有效特征点对应的位置信息,包含的语义信息,构建待建立地图的场景的最终语义地图。
作为本发明的优选,步骤S1包括:获取多个个体机器人在同一时间点下的拍摄图像,即为关键帧。
作为本发明的优选,所述面元被信息包括位置信息、法向量信息、半径数据和始末两个时间戳信息。
作为本发明的优选,所述步骤S3包括:
S3.1,判断每个所述特征点对应的所述面元被是否为稳定的面元被,若判断为是,则进行下一步;
S3.2,通过语义分割每帧的球形投影生成的范围图片并在传感器视角下逐点编号,形成初级语义地图;
S3.3,再次从所述步骤S1开始执行,获得次级语义地图,并判断在所述初级语义地图和所述次级语义地图中所述特征点的编号是否一致,若一致,则直接生产最终语义地图;若不一致,则滤除不一致的特征点。
作为本发明的优选,所述步骤S3.3中重新从所述S1开始执行,在执行到所述步骤S3.1中的稳定判断中加入惩罚项。
作为本发明的优选,所述惩罚项到它的稳定性对数几率
作为本发明的优选,其中
作为本发明的优选,同时获得补偿噪声测量,并填充至语义地图中形成所述最终语义地图。
综上所述,本发明具有以下有益效果:
本发明通过目标环境信息来获取语义信息,通过语义分割提供的编号来处理运动物体,比较次级语义地图和初级的语义一致性,确定是否对初级地图进行优化,最后形成全局一致的最终语义地图,完成快速大范围语义地图的构建。
附图说明
图1为本发明的流程图。
具体实施方式
下面通过具体实施例对本发明作进一步说明。
实施例
一种快速大范围语义地图构建方法,包括以下步骤:
S1,获取多幅图像的目标环境信息,所述多幅图像由多个个体机器人从不同角度拍摄获得。对于单机而言,无论是从多模态信息融合或者定位导航而言,其对硬件计算力和算法的完备性上有着极高的要求,单体机器人功能单一且有限,致使其自身误差很难得到有效矫正,因此其定位精度有限且不稳定,高精度要求的应用场合下鲁棒性表现较差。为解决此类问题,本课题将建立相互协作、信息共享且鲁棒性较好的多机器人协同定位。在本实施例中优选利用多机器人间的信息冗余与容错性,有助于克服传感器信息的不确定性以及对于单个机器人的功能依赖,研究稳定且易实现的地图融合策略,将多机器人采集到的子地图信息整合拼接,高效地构建出较为完整的大规模未知场景地图。
S1包括:获取多个个体机器人在同一时间点下的拍摄图像,即为关键帧。
S2,根据所述目标环境信息中的特征点获得每个特征点的面元被信息以及对应机器人的世界坐标。其中,所述目标环境信息即为关键帧,首先对接收到多幅图像的RGB图像序列和对应的深度图像序列实施特征点检测和描述子计算,对相邻帧进行特征匹配,再使用随机抽样一致后通过RANSAC算法进行匹配优化,通过透视n点PnP算法粗略估计机器人的位姿和运动,根据对当前帧的运动判断是否更新关键帧。
特别的,通过利用语义移除动态信息,关键帧,即点云和一个旋转平移矩阵来表示局部的地,使用地图中的点形成的面元为对象,以地图一致性作为指标进行优化。
所述面元被信息包括位置信息、法向量信息、半径数据和始末两个时间戳信息。
位置信息包括定点地图VD,t时刻点云P的球形投影(极坐标距离限制的点云原始数据);法向量地图ND,图片的雷达极坐标系投影;地图视角(VM&&NM)即为将定点地图VD和法向量地图ND所含信息投影到地图上。
S3,对所述目标环境信息进行语义分割并滤除动态。用语义分割提供的编号来处理运动物体,通过语义分割编号后比较一致性获得运动物体。
所述步骤S3包括:
S3.1,判断每个所述特征点对应的所述面元被是否为稳定的面元被,若判断为是,则进行下一步;
S3.2,通过语义分割每帧的球形投影生成的范围图片并在传感器视角下逐点编号,形成初级语义地图;
S3.3,再次从所述步骤S1开始执行,获得次级语义地图,并判断在所述初级语义地图和所述次级语义地图中所述特征点的编号是否一致,若一致,则直接生产最终语义地图;若不一致,则滤除不一致的特征点。
进一步的,所述步骤S3.3中重新从所述S1开始执行,在执行到所述步骤S3.1中的稳定判断中加入惩罚项。
所述惩罚项到它的稳定性对数几率
其中
S4,根据经过所述步骤S3后留下的每个有效特征点对应的位置信息,包含的语义信息,构建待建立地图的场景的最终语义地图。最后执行回环检测及位姿图优化来获得全局一致的地图。
同时获得补偿噪声测量,并填充至语义地图中形成所述最终语义地图。
本发明通过目标环境信息来获取语义信息,通过语义分割提供的编号来处理运动物体,比较次级语义地图和初级的语义一致性,确定是否对初级地图进行优化,最后形成全局一致的最终语义地图,完成快速大范围语义地图的构建。
上面所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的构思和范围进行限定。在不脱离本发明设计构思的前提下,本领域普通人员对本发明的技术方案做出的各种变型和改进,均应落入到本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
- 一种快速大范围语义地图构建方法
- 一种语义地图构建方法、装置及一种机器人