浮空操控装置、浮空操控装置的操作方法及互动显示系统
文献发布时间:2023-06-19 10:19:37
技术领域
本发明是有关于一种操控装置、操作方法及显示系统,且特别是有关于一种浮空操控装置、浮空操控装置的操作方法及互动显示系统。
背景技术
在3D热潮之后,无须配戴眼镜的全像显示器皆是长久以来人们的梦想,不占空间或占最少空间的显示器是大家的目标。空中显示器(Aerial Display、Air Display)、浮空显示器(floating Display)成为在全像显示器出现之前的相关技术。空中显示器包含反射式、折射式、体积式、布幕式。体积式利用高速使视觉残留,反射与折射皆利用光路径控制成像,使显示内容在空间的第二平面产生之。布幕式则是通过扰动的粒子(空气、水、雾)使投影的内容散射入眼。
这类显示器的目前能操作方式乃通过鼠标键盘,也可以使用VR手杖辅具进行操控。然而,用户仍然无法直接在显示空间中进行直觉式的操作。研发人员正积极开发能够在直接在显示空间中进行直觉式的操作的技术。
发明内容
本发明有关于一种浮空操控装置、浮空操控装置的操作方法及互动显示系统,浮空操控装置利用旋转元件及距离传感器的搭配设计,使得浮空操控装置的空间感测范围落入空间显示范围。用户可以直接在立体影像上进行操作,以完成直觉式操作。
根据本发明的第一方面,提出一种浮空操控装置。浮空操控装置包括一马达、一转轴、一旋转元件、多个距离传感器及一信号处理单元。转轴连接马达。马达驱动旋转元件以转轴为轴心转动。此些距离传感器设置于旋转元件上。信号处理单元用以接收此些距离传感器的多个感测信号,以获得一操作信号。
根据本发明的第二方面,提出一种浮空操控装置的操作方法。浮空操控装置的操作方法包括以下步骤。转动一旋转元件,以使设置于旋转元件上的多个距离传感器转动。接收此些距离传感器的多个感测信号。转换此些感测信号为一操作信号。
根据本发明的第三方面,提出一种互动显示系统。互动显示系统包括一浮空显示装置及一浮空操控装置。浮空显示装置用以于一空间显示范围显示一立体影像。浮空操控装置包括一马达、一转轴、一旋转元件、多个距离传感器及一信号处理单元。转轴连接马达。马达驱动旋转元件以转轴为轴心转动。此些距离传感器设置于旋转元件上。此些距离传感器的一空间感测范围落入空间显示范围内。信号处理单元用以接收此些距离传感器的多个感测信号,以获得一操作信号。
为了对本发明的上述及其他方面有更佳的了解,下文特举实施例,并配合所附附图详细说明如下:
附图说明
图1绘示根据一实施例的互动显示系统的方块图。
图2绘示根据一实施例的浮空显示装置的示意图。
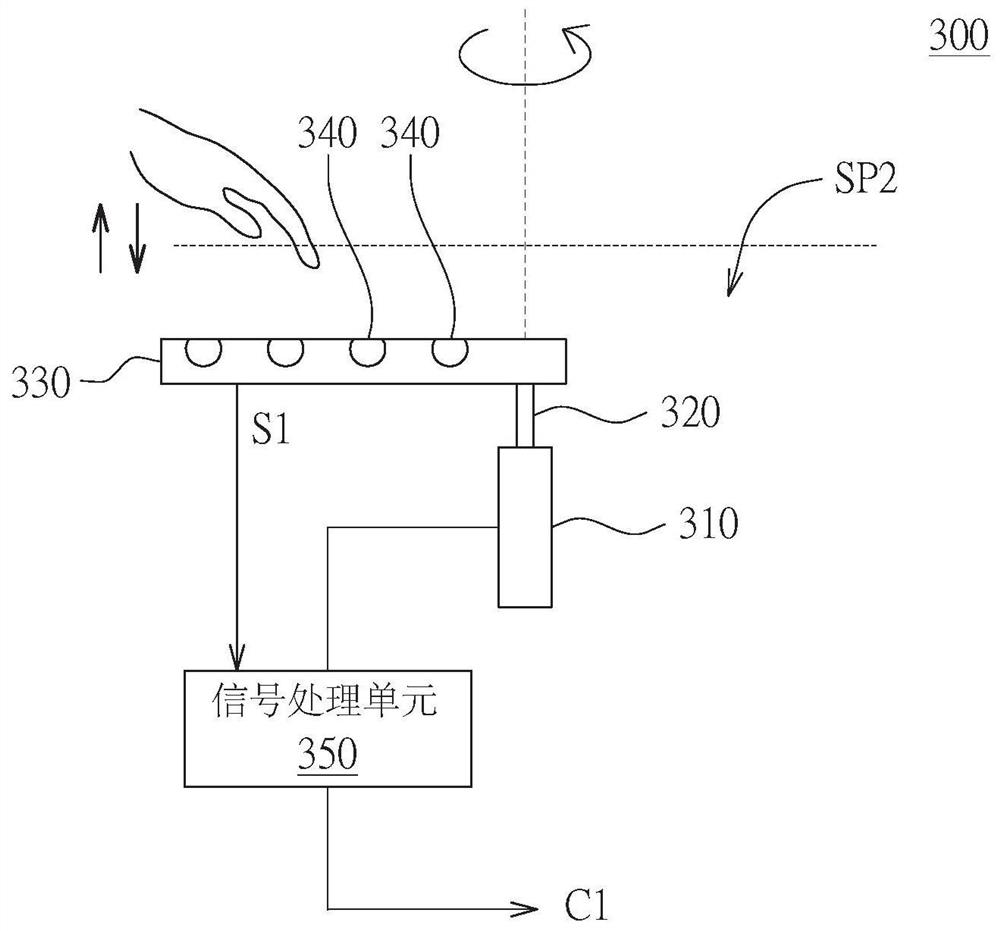
图3绘示根据一实施例的浮空操控装置的示意图。
图4绘示图3的旋转元件与距离传感器的俯视图。
图5绘示根据一实施例的浮空操控装置的操作方法的流程图。
图6绘示根据另一实施例的旋转元件与距离传感器的示意图。
图7绘示图6的旋转元件与距离传感器的俯视图。
图8绘示根据另一实施例的旋转元件与距离传感器的俯视图。
图9绘示根据另一实施例的旋转元件与距离传感器的俯视图。
图10绘示根据另一实施例的旋转元件与距离传感器的俯视图。
图11绘示根据多个其他实施例的旋转元件的俯视图。
图12绘示根据另一实施例的旋转元件与距离传感器的示意图。
图13绘示根据另一实施例的旋转元件与距离传感器的示意图。
附图标记
1000:互动显示系统
100:浮空显示装置
200:主机
300:浮空操控装置
310:马达
320、320-2、320-3、320-4、320-5、320-6、320-9、320-10、320-11、320-12:转轴
330、330-2、330-3、330-4、330-5、330-6、330-7、330-8、330-9、330-10、330-11、330-12、330-13:旋转元件
340、340-2、340-3、340-4、340-5、340-6、340-9、340-10、340-11、340-12、340-13:距离传感器
350:信号处理单元
C1:操作信号
D11、D21、D22、D31、D32、D33、D41、D42、D43、D44:直线方向
IM:立体影像
P1:第一平板
P2:第二平板
S1:感测信号
S110、S120、S130:步骤
SP1:空间显示范围
SP2、SP2-12、SP-13:空间感测范围
V1:显示信号
具体实施方式
请参照图1~3,图1绘示根据一实施例的互动显示系统1000的方块图,图2绘示根据一实施例的浮空显示装置100的示意图,图3绘示根据一实施例的浮空操控装置300的示意图。互动显示系统1000包括浮空显示装置100、浮空操控装置300及一主机200。主机200提供显示信号V1至浮空显示装置100。浮空显示装置100用以于一空间显示范围SP1显示一立体影像IM1。浮空操控装置300的空间感测范围SP2落入空间显示范围SP1。用户可以直接在立体影像IM1上进行操作,主机200从浮空操控装置300取得操作信号C1,以完成直觉式操作。以下更详细说明细部元件。
如图1及图3所示,浮空操控装置300包括一马达310、一转轴320、一旋转元件330、多个距离传感器340及一信号处理单元350。马达310例如是一直流马达、一交流马达或一步进马达。转轴320连接于马达310。马达310驱动转轴320以一固定转速旋转。旋转元件330连接于转轴320。旋转元件330例如是一平面结构。马达310驱动旋转元件330以转轴320为轴心转动。距离传感器340设置于旋转元件330上。距离传感器340例如是一红外线接收器、一激光接收器、或一光敏传感器。距离传感器340具有空间感测范围SP2。用户的手指、手掌可以在空间感测范围SP2挥动、摆动、点选。此些距离传感器340于空间感测范围SP2内可以感测到遮蔽物的距离,以得知手指、手掌的位置。空间感测范围SP2与空间显示范围SP1(绘示于图2)皆为三维空间。空间感测范围SP2与空间显示范围SP1重叠,且空间感测范围SP2落于空间显示范围SP1之内。如此一来,用户可于空间感测范围SP2对显示于空间显示范围SP1的立体影像IM(绘示于图2)进行操作。
信号处理单元350用以接收距离传感器340的感测信号S1,以获得操作信号C1。信号处理单元350例如是一芯片、一电路、一电路板、或存储多组程序代码的存储装置。
请参照图4,其绘示图3的旋转元件330与距离传感器340的俯视图。在图4的实施例中,旋转元件330自转轴320朝一直线方向D11延伸,以形成一分支结构(单分支结构)。距离传感器340沿直线方向D11排列。距离传感器340平均分布于旋转元件330上。
如图4的左侧附图所示,旋转元件330带动距离传感器340旋转。每一距离传感器340每隔一感测期间进行一次感测。如图4的中间附图所示,隔了三个感测期间后,每一距离传感器340在三个位置进行了三次感测。如图4的右侧附图所示,旋转元件330带动距离传感器340旋转360度后,每一距离传感器340在N个位置进行了N次感测。此些感测布满了整个360度的范围。因此,虽然距离传感器340仅排列成一分支结构,但通过旋转元件330的旋转,可以取得布满整个360度的感测信号S1。
请参照图5,其绘示根据一实施例的浮空操控装置300的操作方法的流程图。在步骤S110中,马达310驱动旋转元件330转动,以使设置于旋转元件330上的距离传感器340转动。
接着,在步骤S120中,接收距离传感器340的感测信号S1。在此步骤中,每一距离传感器340每隔一感测期间进行一次感测。旋转元件330带动距离传感器340旋转360度后,每一距离传感器340在N个位置进行了N次感测。举例来说,旋转元件330转动一圈的周期为T秒,接收距离传感器340的感测信号S1的步骤每隔T/N秒(即前述的感测期间)执行一次,以于360度的N个平均位置接收感测信号S1。感测信号S1对应于二维的极坐标系统(例如是(r,θ))。每一感测信号S1所记录的距离可以表示手指或手掌的遮蔽情况。
然后,在步骤S130中,信号处理单元350转换此些感测信号S1为一操作信号C1。在此步骤中,信号处理单元350进行极坐标系统与直角坐标系统的转换(例如是将(r,θ)转换为(x,y))。如此一来,操作信号C1即可代表在T秒的周期内,手指或手掌在空间感测范围SP2的各点位置的遮蔽情况。在一实施例中,手指或手掌位于空间感测范围SP2的1~10公分的高度进行侦测。在另一实施例中,感测信号S1可以更包含高度信息,而对应于三维极坐标系统(例如是(r,θ,z))。信号处理单元350进行极坐标系统与直角坐标系统的转换时,即可将(r,θ,z)转换为(x,y,z)。如此一来,可进一步分析出手指或手掌位于空间感测范围SP2的N层虚拟平面的哪一层。因此,当手指或手掌过于接近旋转元件330时,能够提出距离过近的提醒消息。
如图1所示,主机200连续取得多个周期的操作信号C1时,即可得知手指或手掌的连续动作,主机200可再对应地控制显示信号V1,使立体影像IM对应于操作信号C1产生。如此一来,即可让用户与立体影像IM进行互动。
除上述实施例以外,旋转元件330与距离传感器340亦可采用其他设计。请参照图6及图7,图6绘示根据另一实施例的旋转元件330-2与距离传感器340-2的示意图,图7绘示图6的旋转元件330-2与距离传感器340-2的俯视图。在图6~7的实施例中,旋转元件330-2自转轴320-2朝二直线方向D21、D22延伸,以形成二分支结构(双分支结构)。直线方向D21、D22相反。此些距离传感器340-1沿此些直线方向D21、D22排列。在本实施例中,采用二分支结构,旋转元件330-2只要转动180度,即可使距离传感器340-2布满整个360度的空间感测范围SP2。
请参照图8,其绘示根据另一实施例的旋转元件330-3与距离传感器340-3的俯视图。在图8的实施例中,旋转元件330-3自转轴320-3朝三直线方向D31、D32、D33延伸,以形成三分支结构。直线方向D31、D32、D33相互夹120度。此些距离传感器340-3沿此些直线方向D31、D32、D33排列。在本实施例中,采用三分支结构,旋转元件330-3只要转动120度,即可使距离传感器340-3布满整个360度的空间感测范围SP2。
请参照图9,其绘示根据另一实施例的旋转元件330-4与距离传感器340-4的俯视图。在图9的实施例中,旋转元件330-4自转轴320-4朝四直线方向D41、D42、D43、D44延伸,以形成四分支结构。直线方向D41、D42、D43、D44相互夹90度。此些距离传感器340-4沿此些直线方向D41、D42、D43、D44排列。在本实施例中,采用四分支结构,旋转元件330-4只要转动90度,即可使距离传感器340-4布满整个360度的空间感测范围SP2。
在其他实施例的设计中,旋转元件330可以自转轴320朝s个直线方向延伸,以形成s分支结构。距离传感器340沿这些直线方向排列,这些直线方向平均分布于360度。请参照图10,其绘示根据另一实施例的旋转元件330-5与距离传感器340-5的俯视图。在图10的实施例中,s为8。旋转元件330-5自转轴320-5朝8个直线方向延伸,以形成8分支结构。
上述旋转元件330与距离传感器340的设计可以根据每一距离传感器340的感测期间进行调整。举例来说,马达310转动360度的T秒,距离传感器340在360度须进行N次感测,则每次侦测为所分到的时间即为T/N。每一距离传感器340的感测时间的最大值即为T/N。
若距离传感器340有n个,n个距离传感器340则需进行n次驱动。距离传感器340的单一感测时间的最大值则为T/(N*n)。
若距离传感器340可以分组为p组,每一组的距离传感器340可以同时驱动,则n个距离传感器340的等效驱动数量可降为n/p。因此,距离传感器的单一感测时间的最大值则为T/(Nn/p)。
此外,旋转元件330为s分支结构时,距离传感器的单一感测时间的最大值则为T/(Nn/ps)。通过上述感测时间的计算,可以设计出适当的旋转元件330与距离传感器340的分组/排列方式。
请参照图11,其绘示根据多个其他实施例的旋转元件330-6、330-7、330-8、330-9、330-10、330-11的俯视图。旋转元件330-6为刀形。旋转元件330-7、330-8为长方形。旋转元件330-9为三角形。旋转元件330-10为梯形。旋转元件330-11为弧型。这些形状的旋转元件330-6、330-7、330-8、330-9、330-10、330-11均可实现上述浮空操控的技术。
此外,旋转元件330-6、330-9、330-10、330-11的一最小宽度位于转轴320-6、320-9、320-10、320-11。距离传感器340-6、340-9、340-10、340-11的数量自转轴320-6、320-9、320-10、320-11朝一直线方向增加。如此一来,在远离转轴320-6、320-9、320-10、320-11处可以设置较多的距离传感器340-6、340-9、340-10、340-11,以增加感测密度。
此外,请参照图12,其绘示根据另一实施例的旋转元件330-12与距离传感器340-12的示意图。在图12的实施例中,旋转元件330-12包括一第一平板P1及一第二平板P2。第一平板P1连接于转轴320-12,第二平板P2连接第一平板P1。第一平板P1与第二平板P2组成一L型结构。此些距离传感器340-12设置于第二平板P2上。在此实施例中,当旋转元件330-12转动时,距离传感器340-12形成一个环状的空间感测范围SP2-12。如此一来,可以供多人一起进行浮空操控。
再者,请参照图13,其绘示根据另一实施例的旋转元件330-13与距离传感器340-13的示意图。在图13的实施例中,旋转元件330-13为一弧型结构。在此实施例中,当旋转元件330-13转动时,距离传感器340-13形成一个球状的空间感测范围SP2-13。如此一来,可以提供更多样浮空操控。
根据上述实施例,浮空显示装置100可以于空间显示范围SP1显示立体影像IM1,用户更可直接在立体影像IM1上进行操作,主机200再从浮空操控装置300取得操作信号C1,以完成直觉式操作。
综上所述,虽然本发明已以实施例公开如上,然其并非用以限定本发明。本发明本领域的技术人员,在不脱离本发明的精神和范围内,当可作各种的更动与润饰。因此,本发明的保护范围当视后附的权利要求书所界定者为准。
- 浮空操控装置、浮空操控装置的操作方法及互动显示系统
- 浮空截像式操控装置、互动显示系统及浮空操控方法