具备被展开体的飞行器
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及一种具备被展开体的飞行器。
背景技术
近年,伴随着自主控制技术和飞行控制技术的发展,飞行器在产业上的利用在加速发展。作为该飞行器的一例,可举例无人机。无人机例如通过同时使多个旋翼平衡地旋转而飞行,通过旋翼的旋转次数的增减实现上升和下降,借由旋翼的旋转次数的增减使机体倾斜从而实现前进和后退。
另一方面,上述飞行器的坠落事故风险被认为十分危险,妨碍了飞行器的普及。为了降低坠落事故的风险,作为安全装置,降落伞或滑翔伞等被展开体的展开装置和安全气囊装置等被商品化。例如,专利文献1公开了一种无人航空器(飞行器),可利用弹簧的回弹力,使活塞部在筒内动作,通过该活塞部的动作,使升力产生部件(被展开体的布部)从开口部向外部射出,使其开伞的同时,之后,可通过操纵绳牵引升力产生部件,操纵升力产生部件。
现有技术文献
专利文献
专利文献1:特开2018-43467号公报
发明内容
发明要解决的问题
但是,在上述现有的飞行器中,虽然可牵引操纵绳,但在坠落时不经意间接近障碍物(地面、建筑物、人、动物等)时,因为飞行器自身察觉不到该接近的障碍物,不能立刻牵引操纵绳。因此,在上述现有的飞行器中,不仅有难以避免与障碍物碰撞的情况,也有在减速前碰撞障碍物,难以缓和碰撞冲击的情况。
另外,在上述现有的飞行器中,虽然可以牵引操纵绳,但例如在风向突变变为顺风时,因为飞行器自身无法察觉该状态,因此无法进行适应风向的操纵。因此,在上述现有的飞行器中,例如在较低高度遇到顺风的情况下,会有飞行器失速坠落的可能。
因此,本发明鉴于上述问题,目的在于提供一种具备升力产生部件的展开装置的飞行器,其不仅与以往相比易于自动避免与障碍物的碰撞,且在坠落时即使与障碍物碰撞,与以往相比,也易于自动缓和该碰撞冲击,同时,提供一种具备升力产生部件的展开装置的飞行器,其可进行适应风向的操纵。
解决课题的方法
(1)本发明的飞行器的特征在于,具备:飞行器主体;被展开体,其设置于所述飞行器主体,包含升力产生部件和操纵部,所述操纵部介由连接于所述升力产生部件的连接部件可操纵展开后的所述升力产生部件;障碍物检测部,其设于所述飞行器主体,检测存在于预定距离内的障碍物;控制部,其在所述障碍物检测部检测到所述障碍物时,从所述障碍物检测部接收障碍物检测信号,所述控制部在所述被展开体展开后,基于从所述障碍物检测部接收的所述障碍物检测信号,操作所述操纵部,进行避免与所述障碍物碰撞或缓和与所述障碍物的碰撞中的任1种以上控制。
此处,被展开体只要能在展开状态下通过产生升力或浮力使飞行器减速,就可以是任意形态,作为所述被展开体,例如可举例翼伞、罗加洛(ロガロ)滑翔伞、罗加洛降落伞、三角形滑翔伞、三角形降落伞等。所述升力产生部件是在展开状态下产生升力或浮力的部件,作为具体例,可举例作为所述被展开体之一的滑翔伞、三角形降落伞、罗加洛降落伞的布部(伞衣)等。另外,在上述滑翔伞中,为了利用冲压空气保持翼的形状,大多数滑翔伞具有进气口,但也有没有进气口(单面等)的情况。为了飞行稳定,更优选有进气口的滑翔伞。进一步,可以是具备推进器等推进装置,可获得强制推进力从而飞行的滑翔伞。
(2)在上述(1)的飞行器中,优选进一步包括设置于所述飞行器主体的所述升力产生部件的展开装置,所述展开装置包括:收纳部,其将所述升力产生部件以合伞状态保持;射出部,其从所述收纳部射出所述升力产生部件,所述控制部在所述展开装置运行后,进行避免与所述障碍物碰撞或缓和与所述障碍物的碰撞中的任1种以上控制。
(3)在上述(2)的飞行器中,优选所述障碍物检测部包括激光传感器,超声波传感器、毫米波雷达、亚毫米波雷达和相机中任意1种以上。
根据上述(2)或(3)的构成,通过控制所述升力产生部件的所述操纵部(例如操纵绳),本发明的飞行器可在即将与障碍物碰撞时,自动避开障碍物,即使与障碍物碰撞,也可以在碰撞前充分减小下降速度,因此可自动缓和碰撞的冲击。特别是,本发明的飞行器在即将着陆前,可充分减小下降速度,因此可进行软着陆,而可自动缓和与着陆地点的碰撞冲击。另外,根据本发明的飞行器,即使用于工业用的大型飞行器,也可以充分达成上述各效果。
(4)本发明的飞行器的特征在于,具备:飞行器主体;被展开体,其设置于所述飞行器主体,包括升力产生部件和操纵部,所述操纵部介由连接于所述升力产生部件的连接部件可操纵展开后的所述升力产生部件;数据接收部,其接收从设置于所述飞行器主体周围的障碍物或所述障碍物保持的数据发送部发出的示出所述障碍物位置的位置数据;以及控制部,其在所述数据接收部接收到所述位置数据时,从所述数据接收部接收所述位置数据,所述控制部在所述被展开体展开后,基于从所述数据接收部接收的所述位置数据操作所述操纵部,进行避免与所述障碍物碰撞或缓和与所述障碍物的碰撞中的任1种以上控制。
(5)在上述(4)的飞行器中,优选进一步包括设置于所述飞行器主体的所述升力产生部件的展开装置,所述展开装置包括:收纳部,其将所述升力产生部件以合伞状态保持;以及射出部,其从所述收纳部射出所述升力产生部件,所述控制部在所述展开装置运行后,进行避免与所述障碍物碰撞或缓和与所述障碍物的碰撞中的任1种以上控制。
(6)在上述(4)或(5)的飞行器中,所述数据接收部可以通过接收所述位置数据的中继站接收所述位置数据。
(7)在上述(4)~(6)的飞行器中,优选所述位置数据包括气压、高度、GPS、加速度、速度和距离中的任意1种以上。
根据上述(4)~(7)的构成,本发明的飞行器可获得示出所述障碍物位置的位置数据(例如,所述障碍物是人时,人所持的移动终端的位置数据(气压传感器、GPS、未来的3维地图数据);所述障碍物是车时,搭载于车上的位置数据(GPS、未来的3维地图数据)),基于此,操作所述操纵部,进行避免与所述障碍物碰撞或缓和与所述障碍物的碰撞等控制。其结果,不仅可预先回避障碍物而飞行(下落),并且即使在下落时发生碰撞,也可以进行事先预测并减速,因此可将伤害降到最小。
(8)本发明的飞行器的特征在于,具备:飞行器主体;被展开体,其设置于所述飞行器主体,包括升力产生部件和操纵部,所述操纵部介由连接于所述升力产生部件的连接部件可操纵展开后的所述升力产生部件;风向检测部,其设置于所述飞行器主体,检测风向;以及控制部,其在所述风向检测部检测出所述风向时,从所述风向检测部接收包括所述风向信息的风向信号,所述控制部在所述被展开体展开后,可基于从所述风向检测部接收的所述风向信号,根据需要进行操作所述操纵部的控制。
此处,升力产生部件只要是在展开状态下产生升力的部件,就可以是任意形态,作为该升力产生部件,例如可举例翼伞、罗加洛滑翔伞、罗加洛降落伞、三角形滑翔伞、三角形降落伞等。所述升力产生部件是在展开状态下产生升力或浮力的部件,作为具体例,可举例作为所述被展开体的滑翔伞、三角形降落伞、罗加洛降落伞的布部(伞衣)等。另外,在上述滑翔伞中,为了利用冲压空气保持翼的形状,大多数滑翔伞具有进气口,但也有没有进气口(单面等)的情况。为了飞行稳定,更优选有进气口的滑翔伞。进一步,可以是具备推进器等推进装置,可获得强制推进力从而飞行的滑翔伞。
根据上述(8)的构成,可以容易地使飞行器的行进方向朝向适应风向的方向(例如,使行进风向朝向与顺风方向不同的方向)。另外,根据本发明的飞行器,即使用于工业用的大型飞行器,也可以充分达成上述效果。
(9)在上述(8)的飞行器中,优选进一步包括设置于所述飞行器主体的所述升力产生部件的展开装置,所述展开装置包括:收纳部,其将所述升力产生部件以合伞状态保持;以及射出部,其从所述收纳部射出所述升力产生部件,所述控制部在所述展开装置运行后,基于从所述风向检测部接收的所述风向信号,根据需要进行操作所述操纵部的控制。
(10)在上述(8)或(9)的飞行器中,所述风向检测部检测风向的时间间隔优选1秒以下(优选0.1秒以下,更优选0.01秒以下)。
根据上述(10)的构成,在风向检测部检测风向的时间间隔在1秒左右时,例如若在150米左右的高度,直至下落到地面等为止,可将飞行器的行进方向朝向相对于风向的适当方向。另外,在风向检测部检测风向的时间间隔在0.1秒左右时,例如若在20米左右的高度,直至下落到地面等为止,可将飞行器的行进方向朝向相对于风向的适当方向。另外,在风向检测部检测风向的时间间隔在0.01秒左右时,例如若在2米左右的高度,直至下落到地面等为止,可将飞行器的行进方向朝向相对于风向的适当方向。
(11)在上述(8)至(10)的飞行器中,所述风向检测部优选具有风向标型风向计。
根据上述(4)的构成,可容易地检测风向。
(12)作为其他观点,在上述(8)至(10)的飞行器中,所述风向检测部可以具有1个以上风速计。
根据上述(12)的构成,可容易地检测风向和风速。特别是具有多个风速计时,可更精确地检测风向和风速。
(13)作为其他观点,在上述(8)至(10)的飞行器中,所述风向检测部可以具有高速率GPS,其比GPS更高速率地定位;以及地磁传感器,其检测所述飞行器的方向。
根据上述(13)的构成,可例如每0.1秒以下检测飞行器上的绝对风向,利用该检测到的绝对风向,可更迅速地控制飞行器的操纵部而进行操作。
(14)作为其他观点,在上述(8)至(10)的飞行器中,所述风向检测部具有GPS、检测所述飞行器的方向的加速度传感器以及指南针。
根据上述(14)的构成,可每1秒以下检测飞行器上的绝对风向,利用该检测到的绝对风向,可迅速地控制飞行器的操纵部而进行操作。即,虽然不能像上述(13)的构成一样迅速地控制飞行器的操纵部并进行操作,但在较高高度时(例如150m左右),直至下落至地面等为止,可充分、迅速地控制操纵部而进行操作。
附图说明
[图1]是示出本发明的第1实施方式中的飞行器上搭载的滑翔伞展开的状态的正面图。
[图2]是示出图1中的滑翔伞展开装置的截面图,是运行前的状态图。
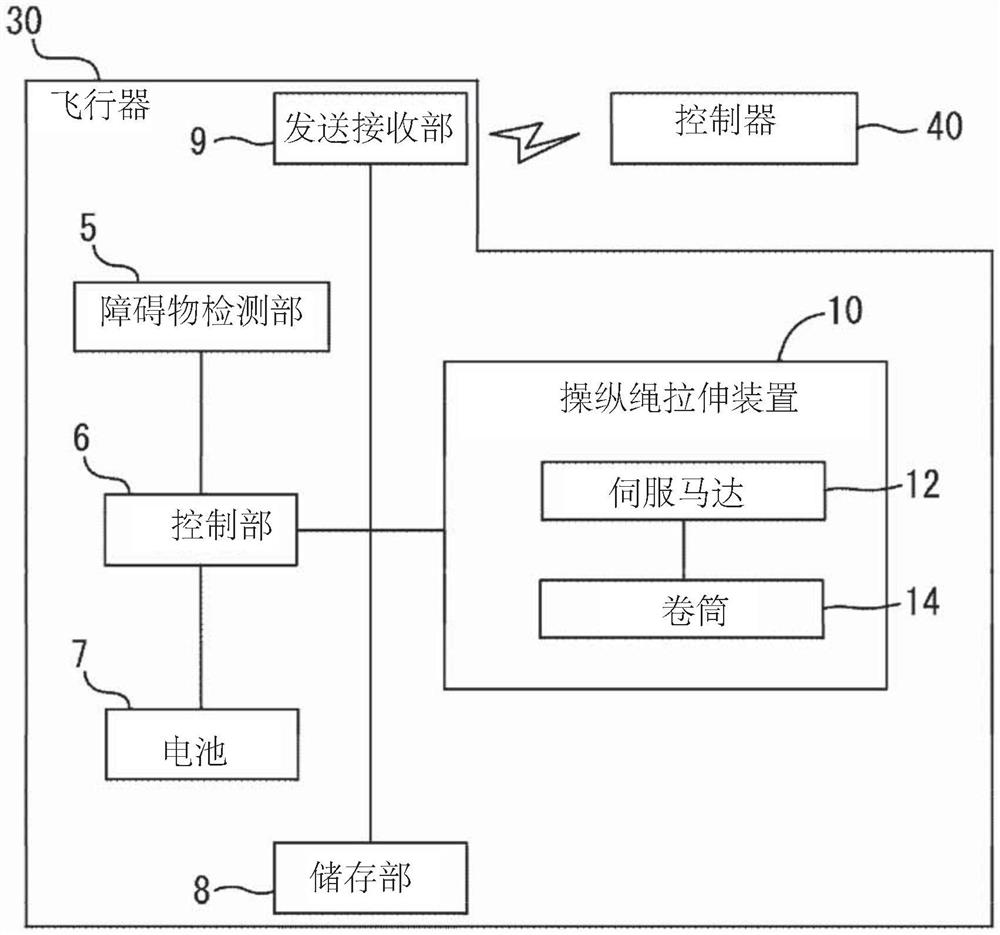
[图3]是包括图1的飞行器中的滑翔伞的展开装置的控制结构的框图。
[图4]是包括本发明的第2实施方式中的滑翔伞的展开装置的控制结构的框图。
[图5]是示出本发明的第3实施方式中的飞行器上搭载的滑翔伞展开的状态的正面图。
[图6]是示出图5中的滑翔伞的展开装置的截面图,是运行前的状态图。
[图7]是包括本发明的第3实施方式中的滑翔伞的展开装置的控制结构的框图。
具体实施方式
<第1实施方式>
下文基于图1~图3,说明本发明的第1实施方式。
如图1所示,飞行器30具备:飞行器主体31;结合于飞行器主体31,推进该飞行器主体31的一个以上的推进机构(例如推进器等)32;设于飞行器主体31的下部的多个腿部33;以及作为被展开体的滑翔伞的展开装置80。
在图1中,滑翔伞1具备通过兜满空气而整体呈翼型的伞衣2;以及从伞衣2向下方延伸并连接于飞行器30的多个吊绳3。
伞衣2如图1所示,在从前方观察滑翔伞1时,在飞行器30的上方形成为向左右方向延伸的近圆弧形状。另外,吊绳3(绳)从伞衣2向飞行器30延伸设置,使每4条绳左右对称。另外,吊绳3的一端可以连接到附设于飞行器30的装置。
左右一对的操纵绳4用于操纵飞行器30,其一端部对称地从中途分支各四条并设于伞衣2的后端边缘部分,另一端部的每条连接于后述的各操纵绳拉伸装置10的卷筒14。
另外,紧急情况时,在滑翔伞的展开装置80已展开的飞行器30中,通过操作左右的操纵绳4,使伞衣2变形,改变受到的风压阻力,由此操纵其旋转、上升或下降。例如,在使飞行器30向右旋转时,通过拉伸右侧的操纵绳4,使伞衣2右侧部的阻力增大,由此使伞衣2右侧速度下降而转换方向。另外,在使飞行器30着陆时,通过拉伸左右的操纵绳4,使伞衣2整体的阻力增大,由此降低下降速度,进行着陆。另外,操纵绳4的拉伸操作是将操纵绳4卷绕在后述的操纵绳拉伸装置10的卷筒14上的操作。
运行前的滑翔伞的展开装置80如图2所示,具备促动器88、滑翔伞1和操纵绳拉伸装置10。促动器88具备具有收纳点火药(图示略)的杯状外壳85的气体产生器84,具有凹部(凹状部件)82和与该凹部82一体形成的活塞头83(发射台)的活塞81(移动部件),收纳活塞81且限制该活塞81推进方向的有底筒状壳体86(容器)。另外,通常时(展开前)的滑翔伞的展开装置80的滑翔伞1和吊绳3折叠收纳于圆筒状的壳体86内,紧急情况时,通过从飞行器30的控制部6(参照图3)接收到异常信号的促动器88(参照图2)等的起动,从壳体86内向外部射出后,如图1所示展开并使用。
另外,如图2所示,在壳体86的内壁和活塞头83的外周部之间,形成有作为间隙(clearance)的连通部S1。在活塞81移动(向图2的箭头方向射出)时,壳体86的内壁与活塞头83之间的空间S变为负压,但因为空气从连通部S1流入空间S,可减小此时的负压,使活塞81顺畅地移动。
气体产生器84设于凹部82内。气体产生器84的前端部设有气体喷出口,通过电信号进行点火,由此可在凹部82内产生作为使活塞81向图2的箭头方向射出的推进力的气体。另外,在凹部82与气体产生器84的外壁部之间,设有O型圈等密封部件89,从而在运行时不会发生气体泄漏。
另外,虽未图示,但气体产生器84为小型轻量部件,具备填充有气体产生剂的杯体,点燃气体产生剂的点火器,和保持点火器的保持器。另外,气体产生器84例如可举例微型气体产生器等,但只要能够产生气体,可以是任意的装置。另外,气体产生剂是通过由点火器运行产生的热粒子点燃并通过燃烧产生气体的药剂(火药或推进药)。
一般而言,气体产生器大致分为非火药式和火药式。非火药式的主流是将针等尖锐部件和压缩弹簧连接到密封有二氧化碳、氮气等气体的贮气瓶,利用弹簧力弹飞尖锐部件,使其碰撞密封贮气瓶的封板,释放气体。此时,为了释放弹簧的压缩力,一般使用伺服马达等驱动源。接着,在火药式的情况时,可以是点火器单体,也可以是具备点火器和气体产生剂的气体产生器。另外,可以使用通过火药力使小型贮气瓶的封板开裂,使内部气体向外部排出的混合型、贮存型的气体产生器。此时,贮气瓶内的加压气体选择氩、氦、氮、二氧化碳等不可燃气体中的至少一种以上。另外,在加压气体被释放时,为了确保其膨胀,气体产生器中可具备火药式发热体。进一步,气体产生器可根据需要,具备过滤器或/和调节气体流量的孔口。
气体产生剂优选使用非叠氮化物气体产生剂,一般而言,气体产生剂形成为包含燃料、氧化剂和添加剂的成型体。燃料例如可利用三唑衍生物,四唑衍生物,胍衍生物,偶氮二甲酰胺衍生物,肼衍生物等或其组合。具体而言,例如可适宜利用硝基胍,硝酸胍,氰基胍,5-氨基四唑等。另外,氧化剂例如可利用碱式硝酸铜等碱性硝酸盐,高氯酸铵、高氯酸钾等高氯酸盐,或包含选自碱金属、碱土金属、过渡金属和氨的阳离子的硝酸盐等。硝酸盐例如适合利用硝酸钠、硝酸钾等。另外,添加剂可举例粘合剂、造渣剂、燃烧调节剂等。粘合剂例如可适当利用羧甲基纤维素的金属盐、硬脂酸盐等有机粘合剂,或合成水滑石、酸性白土等无机粘合剂。造渣剂可适当利用氮化硅、二氧化硅、酸性白土等。另外,燃烧调节剂可适当利用金属氧化物、硅铁、活性炭、石墨等。另外,也可以使用主要成分为硝化纤维素的单基火药、双基火药、三基火药。
另外,气体产生剂的成型体的形状有颗粒状、丸状、圆柱状等粒状,圆盘状等各种形状。另外,在圆柱状中,也可利用在成型体内部具有贯通孔的有孔状(例如单孔筒形状或多孔筒形状)成型体。另外,优选除气体产生剂的形状外,还考虑气体产生剂的线性燃烧速度、压力指数等,适当选择成型体的尺寸和填充量。
在上述构成中,可通过推进活塞81,直接推出滑翔伞1使其展开。另外,壳体86的开口端部在初始状态下由盖87关闭,通过推出滑翔伞1而从上述开口端部移除。
操纵绳拉伸装置10如图2所示,具备支撑台11、伺服马达12、卷筒轴13和卷筒14,设为一对以对应左右的操纵绳4。
支撑台11在飞行器30的壳体86内,固定于飞行器主体31上部。伺服马达12固定于支撑台11的一端侧的侧部,具有与卷筒轴13的一个端部一体化的输出轴。卷筒14以可以卷筒轴13为中心旋转的方式被支撑。通过上述构成,各操纵绳拉伸装置10通过伺服马达12可适当进行将左右的操纵绳4卷绕到左右的各卷筒14的操作,或从各卷筒14放出左右的操纵绳4的操作。
另外,如图3所示,该飞行器30具备:障碍物检测部5;控制部6;电池7;储存控制部6发出的信息的储存部8;以及接收控制器40发出的操作信号,并将飞行器30的信息发送至控制器40的发送接收部9等。
障碍物检测部5检测飞行器30的高度,将作为检测出的高度信息的高度检测信号输出至控制部6。另外,障碍物检测部5在检测到自飞行器主体31或障碍物检测部5起的预定距离内存在的障碍物时,将障碍物检测信号输出至控制部6的同时,检测飞行器主体31与障碍物之间的距离,向控制部6输出作为检测出的距离信息的距离检测信号。另外,障碍物检测部5检测飞行器30的异常,基于检测出的信息,向控制部6输出异常信号。另外,障碍物检测部5优选根据需要,包含加速度传感器、陀螺仪传感器、气压传感器、GPS(全球定位系统)、激光传感器、超声波传感器、红外线传感器、毫米波雷达、亚毫米波雷达、相机、速度传感器和风向检测传感器中的至少1种以上。
控制部6是具有CPU、ROM、RAM等的计算机,根据需要,发送操作信号,控制左右的操纵绳拉伸装置10,例如,输出使左右的操纵绳拉伸装置10的各伺服马达12分别运行或停止的信号。另外,控制部6从障碍物检测部5实时接收障碍物检测信号、距离检测信号、高度检测信号(包括飞行器30的高度信息),根据这些接收的各信号,判断是否运行左右的操纵绳拉伸装置10。例如,控制部6在接收到障碍物检测信号时,或在接收的距离检测信号所包含的距离信息在预定距离以下时,进行向左右的操纵绳拉伸装置10发送控制信号,使左右的操纵绳拉伸装置10中的任一个运行而让飞行器30回避障碍物的控制,或进行使左右的操纵绳拉伸装置10均运行,拉伸操纵绳而缓和飞行器30与障碍物碰撞冲击的控制。另外,控制部6在障碍物检测部5检测到飞行器30发生异常时,从障碍物检测部5接收异常信号,根据接收的异常信号,使促动器88中的气体产生器84运行。
控制器40用于让操作者操作飞行器30,基于操作者的输入,向发送接收部9发送操作信号。由此,不仅可在通常时操作飞行器30,也可以在紧急情况时操作操纵绳拉伸装置10。另外,控制器40可以从发送接收部9接收飞行器30的飞行状态(包括异常状态)等各种信息。
接着,对滑翔伞的展开装置80的运行进行说明。
首先,飞行器30在飞行中陷入紧急情况时,障碍物检测部5检测到异常状态,向控制部6发送异常信号。接收到异常信号的控制部6向滑翔伞的展开装置80的促动器88发送运行信号。接收到该运行信号的促动器88使气体产生器84运行,而使滑翔伞1从飞行器30的壳体86内向外部射出,展开为图1所示的状态。另外,配合气体产生器84的运行,操纵绳拉伸装置10使操纵绳4为可放出的状态。例如,为了使卷筒14向操纵绳4的放出方向旋转而使伺服马达12运行,或使卷筒14的旋转处于自由状态,利用滑翔伞1的射出力(气体产生器84的气体压力),使其为拉出操纵绳4的状态。
接着,在滑翔伞1展开后,飞行器30的高度逐渐下降,基于控制器40发出的操作信号,另外,基于控制部6发出的控制信号,操纵绳拉伸装置10拉伸或放出操纵绳4,自动操作飞行器30,使其在安全场所软着陆,或在即将与障碍物碰撞时自动回避障碍物,或为万一碰撞的情况作准备,自动缓和碰撞冲击。
根据本实施方式的飞行器30,通过卷绕或放出操纵绳4,可自动调节操纵绳4的拉伸状态。由此,飞行器30可在即将与障碍物碰撞时自动避开障碍物,即使与障碍物碰撞,也可在碰撞前充分减小下降速度,因此可自动缓和碰撞冲击。特别是,根据本实施方式的飞行器30,在即将着陆前,可充分减小下降速度,因此可进行软着陆,可自动缓和与着陆场所的碰撞冲击。另外,根据飞行器30,即使用于工业用的大型飞行器,也可以充分达成上述各效果。
<第2实施方式>
下文对本发明的第2实施方式的飞行器进行说明。另外,未进行说明的点,以及与第1实施方式中后二位相同的符号的部位,如无特别说明,是与第1实施方式相同的部位,省略说明。
本实施方式的飞行器(整体图未图示)在包含图4示出的滑翔伞的展开装置的控制结构这一点上与第1实施方式不同。下文进行具体说明。
飞行器130与第1实施方式的飞行器30的构成基本相同,但如图4所示,在使用发送接收部109代替第1实施方式的发送接收部9这一点上不同,所述发送接收部109通过中继站150接收飞行器151、移动终端153、或建筑物155的位置数据(包括高度数据),或发送接收部109直接从飞行器151、移动终端153、或建筑物155接收各位置数据。
此处,中继站150不仅是通信基站,也包含进行航空管制的通讯部门等。因此,在中继站为进行航空管制的通讯部门等时,发送接收部109例如可在接收位置数据的同时,也接收航空管制相关的数据(哪个地点何时可以飞行等信息,飞行路径信息等)。
另外,移动终端153可以是发送位置数据专用的终端,也可以是智能手机等终端。另外,建筑物155中的数据发送部156可以是发送位置数据专用的终端,也可以是使用无线或有线环境的网络的计算机终端。
根据本实施方式的飞行器130,不仅可以起到与第1实施方式相同的作用效果,还可以与其他飞行器、人、建筑物等障碍物通信,把握位置。其结果,不仅可以预先避开障碍物进行飞行(下落),并且即使在下落时发生碰撞,也可以事前预测并减速,将伤害降到最小。
<第3实施方式>
下文说明本发明的第3实施方式的飞行器。另外,未进行说明的点,以及与第1实施方式中后二位相同的符号的部位,如无特别说明,是与第1实施方式相同的部位,省略说明。
如图5所示,飞行器230具备飞行器主体231,结合于飞行器主体231并推进该飞行器主体231的一个以上的推进机构(例如推进器等)232,设于飞行器主体231的下部的多个腿部233,以及滑翔伞的展开装置280。
在图5中,滑翔伞201具备通过兜满空气而整体呈翼型的伞衣202,以及从伞衣202向下方延伸并连接于飞行器230的多个吊绳203。
伞衣202如图5所示,在从前方观察滑翔伞201时,在飞行器230的上方形成为向左右方向延伸的近圆弧形状。另外,吊绳203(绳)从伞衣202向飞行器230延伸而设置,使每4条绳左右对称。另外,吊绳203的一端可以连接到附设于飞行器230的装置。
左右一对的操纵绳204用于操纵飞行器230,其一端部对称地从中途分支各四条并设于伞衣202的后端边缘部分,另一端部的每条连接于后述的各操纵绳拉伸装置210(操纵部的一例)的卷筒214。
另外,紧急情况时,在滑翔伞的展开装置280展开的飞行器230中,通过操作左右的操纵绳204,使伞衣202变形,改变受到的风压阻力,由此操纵其旋转、上升或下降。例如,在使飞行器230向右旋转时,通过拉伸右侧的操纵绳204,使伞衣202右侧部的阻力增大,由此使伞衣202右侧速度下降而转换方向。另外,在使飞行器230着陆时,通过拉伸左右的操纵绳204,使伞衣202整体的阻力增大,由此降低下降速度,进行着陆。另外,操纵绳204的拉伸操作是将操纵绳204卷绕在后述的操纵绳拉伸装置210的卷筒214上的操作。
运行前的滑翔伞的展开装置280如图6所示,具备促动器288、滑翔伞201和操纵绳拉伸装置210。促动器288具备具有收纳点火药(图示略)的杯状外壳285的气体产生器284,具有凹部(凹状部件)282和与该凹部282一体形成的活塞头83(发射台)的活塞281(移动部件),收纳活塞281且限制该活塞281推进方向的有底筒状的壳体286(容器)。另外,通常时(展开前)的滑翔伞的展开装置280的滑翔伞201和吊绳203折叠收纳于圆筒状的壳体286内,紧急情况时,通过从飞行器230的控制部206(参照图7)接收到异常信号的促动器288(参照图6)等的起动,从壳体286内向外部射出后,如图5所示展开并使用。
另外,如图6所示,在壳体286的内壁和活塞头83的外周部之间,形成有作为间隙(clearance)的连通部S2。在活塞281移动(向图6的箭头方向射出)时,壳体286的内壁与活塞头83之间的空间S3变为负压,但因为空气从连通部S2流入空间S3,可减小此时的负压,使活塞281顺畅地移动。
气体产生器284设于凹部282内。气体产生器284的前端部设有气体喷出口,通过电信号进行点火,由此可在凹部282内产生作为使活塞281向图6的箭头方向射出的推进力的气体。另外,在凹部282与气体产生器284的外壁部之间,设有O型圈等密封部件289,从而在运行时不会发生气体泄漏。
另外,虽未图示,但气体产生器284为小型轻量的部件,具备填充气体产生剂的杯体,点燃气体产生剂的点火器,和保持点火器的保持器。另外,气体产生器284例如可举例微型气体产生器等,但只要能够产生气体,可以是任意的装置。另外,气体产生剂是通过由点火器运行产生的热粒子点燃并通过燃烧产生气体的药剂(火药或推进药)。
一般而言,气体产生器大致分为非火药式和火药式。非火药式的主流是将针等尖锐部件和压缩弹簧连接到密封有二氧化碳、氮气等气体的贮气瓶,利用弹簧力弹飞尖锐部件,使其碰撞密封贮气瓶的封板,释放气体。此时,为了释放弹簧的压缩力,一般使用伺服马达等驱动源。接着,在火药式的情况时,可以是点火器单体,也可以是具备点火器和气体产生剂的气体产生器。另外,可以使用通过火药力使小型贮气瓶的封板开裂,使内部气体向外部排出的混合型、贮存型的气体产生器。此时,贮气瓶内的加压气体选择氩、氦、氮、二氧化碳等不可燃气体中的至少一种以上。另外,在加压气体被释放时,为了确保其膨胀,气体产生器中可具备火药式发热体。进一步,气体产生器可根据需要,具备过滤器或/和调节气体流量的孔口。
气体产生剂优选使用非叠氮化物气体产生剂,一般而言,气体产生剂形成为包含燃料、氧化剂和添加剂的成型体。燃料例如可利用三唑衍生物,四唑衍生物,胍衍生物,偶氮二甲酰胺衍生物,肼衍生物等或其组合。具体而言,例如适宜利用硝基胍,硝酸胍,氰基胍,5-氨基四唑等。另外,氧化剂例如利用碱式硝酸铜等碱性硝酸盐,高氯酸铵、高氯酸钾等高氯酸盐,或包含选自碱金属、碱土金属、过渡金属和氨的阳离子的硝酸盐等。硝酸盐例如适合利用硝酸钠、硝酸钾等。另外,添加剂可举例粘合剂、造渣剂、燃烧调节剂等。粘合剂例如可适当利用羧甲基纤维素的金属盐、硬脂酸盐等有机粘合剂,或合成水滑石、酸性白土等无机粘合剂。造渣剂可适当利用氮化硅、二氧化硅、酸性白土等。另外,燃烧调节剂可适当利用金属氧化物、硅铁、活性炭、石墨等。另外,也可以使用主要成分为硝化纤维素的单基火药、双基火药、三基火药。
另外,气体产生剂的成型体的形状有颗粒状、丸状、圆柱状等粒状,圆盘状等各种形状。另外,在圆柱状中,也可利用在成型体内部具有贯通孔的有孔状(例如单孔筒形状或多孔筒形状)成型体。另外,优选除气体产生剂的形状外,还考虑气体产生剂的线性燃烧速度、压力指数等,适当选择成型体的尺寸和填充量。
在上述构成中,可通过推进活塞281,直接推出滑翔伞201使其展开。另外,壳体286的开口端部在初始状态下由盖287关闭,通过推出滑翔伞201而从上述开口端部移除。
操纵绳拉伸装置210如图6所示,具备支撑台211、伺服马达212、卷筒轴213和卷筒214,设为一对以对应左右的操纵绳204。
支撑台211在飞行器230的壳体286内,固定于飞行器主体231上部。伺服马达212固定于支撑台211的一端侧的侧部,具有与卷筒轴213的一个端部一体化的输出轴。卷筒214以可以卷筒轴213为中心旋转的方式被支撑。通过上述构成,各操纵绳拉伸装置210通过伺服马达212可适当进行将左右的操纵绳204卷绕到左右的各卷筒214的操作,或从各卷筒214放出左右的操纵绳204的操作。
另外,如图7所示,该飞行器230具备:风向检测部205;控制部206;电源207;储存控制部206发出的信息的储存部208;以及接收控制器240发出的操作信号,并将飞行器230的信息发送至控制器240的发送接收部209等。
风向检测部205每1秒以下检测飞行器230受到的风向(根据需要,也检测风速),将作为检测出的风向信息的风向信号(在也检测风速时包括风速信息)输出至控制部206。另外,风向检测部205例如优选设有(a)风向标型风向计,(b)至少一个风速计,(c)包含比一般的GPS(全球定位系统)更高速率地定位的高速率GPS(例如一般的GPS为1Hz定位,高速率GPS为10Hz定位)和检测飞行器230方向的地磁传感器的风向计(例如可每0.1秒以下检测绝对风向的结构),(d)包含加速度传感器、GPS和指南针的风向计(例如可每1秒以下检测绝对风向的结构)中的一个以上。另外,例如,在飞行器230上设有高度计以向控制部206发送高度信息,同时设有上述(c)、(d)的风向计两者时,可以配合高度,分别使用上述(c)、(d)的风向计。即,在高度较高的状态下,使用上述(d)的风向计,在高度在预定高度以下时,使用上述(c)的风向计等。另外,在风向检测部205发送的风向信号是模拟信号时,根据需要,在风向检测部205和控制部206之间连接将模拟信号转换为数字信号的AD转换器。
控制部206是具有CPU、ROM、RAM等的计算机,根据需要,发送操作信号,控制左右的操纵绳拉伸装置210,例如,输出使左右的操纵绳拉伸装置210的各伺服马达212分别运行或停止的信号。另外,控制部206从风向检测部205实时接收风向信号,根据接收到的风向信号,判断是否运行左右的操纵绳拉伸装置210。例如,控制部206在接收到风向信号时,进行向左右的操纵绳拉伸装置210发送控制信号,使左右的操纵绳拉伸装置210中的任一个运行以使飞行器230的行进方向为相对于风向的适当方向(例如,风向相对于飞行器230为非顺风方向等)的控制(操纵飞行器230的行进方向的控制)等。另外,控制部206在异常传感器(未图示)检测到飞行器230发生异常时,接收该异常传感器发出的异常信号,根据接收的异常信号,使促动器288中的气体产生器284运行。
控制器240用于让操作者操作飞行器230,基于操作者的输入,向发送接收部209发送操作信号。由此,不仅可在通常时操作飞行器230,也可以在紧急情况时操作操纵绳拉伸装置210。另外,控制器240可以从发送接收部209接收飞行器230的飞行状态(包括异常状态)等各种信息。
接着,对滑翔伞的展开装置280的运行进行说明。
首先,飞行器230在飞行中陷入紧急情况时,异常传感器(未图示)检测到异常状态,向控制部发送异常信号。接收到异常信号的控制部206向滑翔伞的展开装置280的促动器288发送运行信号。接收到该运行信号的促动器288使气体产生器284运行,而使滑翔伞201从飞行器230的壳体286内向外部射出,展开为图5所示的状态。另外,配合气体产生器284的运行,操纵绳拉伸装置210使操纵绳204为可放出的状态。例如,为了使卷筒214向操纵绳204的放出方向旋转而使伺服马达212运行,或使卷筒214的旋转处于自由状态,利用滑翔伞201的射出力(气体产生器284的气体压力),使其为拉出操纵绳204的状态。
接着,在滑翔伞201展开后,飞行器230的高度逐渐下降,基于控制器240发出的操作信号,另外,基于从风向检测部205接收到风向信号的控制部206发出的控制信号,操纵绳拉伸装置210拉伸或放出操纵绳204,自动操作飞行器230,使其在安全场所软着陆,或在即将与障碍物碰撞时自动回避障碍物,或为万一碰撞的情况作准备,自动缓和碰撞冲击。
根据本实施方式的飞行器230,通过卷绕或放出操纵绳204,可自动调节操纵绳204的拉伸状态。由此,飞行器230即使在顺风时,也可迅速改变行进方向,操纵飞行器230向不顺风方向行进。因此,根据本实施方式的飞行器230,即使在高度较低时,也可在失速下落前进行应对,防止坠落。另外,根据飞行器230,即使用于工业用的大型飞行器,也可以充分达成上述各效果。
上文对本发明的实施方式进行了说明,但仅举出了具体例,未特别限定本发明,具体构成等可进行适当的设计变化。另外,发明的实施方式所记载的作用和效果仅列举了本发明产生的最优的作用和效果,本发明的作用和效果不限于本发明的实施方式中所记载的作用和效果。
另外,在上述各实施方式中,滑翔伞的展开装置中,操纵绳拉伸装置对应左右的操纵绳设有2个,但也可以构成为用一个操纵绳拉伸装置卷绕左右操纵绳。
另外,在第2实施方式中,示出了设有障碍物检测部105的示例,但不限于此,也可以不设有障碍物检测部105。
另外,在第3实施方式中,示出了设有风向检测部205的示例,但也可以像第1实施方式示出的那样,设有检测障碍物并向控制部发送障碍物检测信号的障碍物检测部。由此,在接收到障碍物检测信号的控制部中,通过进行适当操作操纵绳拉伸装置(操纵飞行器的行进方向)的控制,飞行器可在即将与障碍物碰撞时自动避开障碍物,并且即使与障碍物碰撞,也可以在碰撞前充分降低下降速度,因此可以自动缓和碰撞冲击。
附图标记说明
1、201 滑翔伞
2、202 伞衣
3、203 吊绳
4、204 操纵绳
5、105 障碍物检测部
6、106、206 控制部
7、107、207 电池
8、108、208 储存部
9、109、209 发送接收部
10、110、210 操纵绳拉伸装置
11、211 支撑台
12、112、212 伺服马达
13、213 卷筒轴
14、114、214 卷筒
30、130、151、230 飞行器
31、231 飞行器主体
32、232 推进机构
33、233 腿部
40、240 控制器
80、280 滑翔伞的展开装置
81、281 活塞
82、282 凹部
83、283 活塞头
84、284 气体产生器
85、285 外壳
86、286 壳体
87、287 盖
88、288 促动器
89、289 密封部件
150 中继站
152、154、156 数据发送部
153 移动终端
155 建筑物
205 风向检测部
S、S3 空间
S1、S2 连通部
- 具备被展开体的飞行器
- 一种具备一体流动控制的飞行器及气动匹配设计方法