具有锁定致动器的缝线穿引器
文献发布时间:2023-06-19 10:32:14
背景技术
本公开涉及一种用于操纵缝线的手术器械。具体而言,本公开涉及一种用于使缝线穿过组织的器械。
在许多手术程序中,缝线用于闭合伤口并且可以用于修复韧带和软组织的损伤。作为修复的一部分,缝线可以穿过组织以将组织缝合或保持在一起,或者用于捕获组织并将其锚固到外科植入物(例如缝线锚固件)的目的。用于缝线穿引的已知器械通常包括可以是弯曲的穿刺部分或针,以及用于将缝线保持在针的一部分内以使缝线能够在修复程序期间被操纵并穿过组织的装置。
在诸如美国申请号14/193,069和美国申请号15/306,406中所描述的示例性实施方式中,可滑动构件(例如,线构件或钩构件)可以包括在针内腔内,以便于取回/固定缝线。在操作中,可滑动构件可选择性地从针的尖端向远侧延伸以便于捕获缝线,并且接着回缩以便固定捕获的缝线(即,通过针与可滑动构件之间的相对运动)。可滑动构件通常经由器械的柄部上的致动器来控制。例如,柄部可包括杆、滑动件、按钮、旋钮或其它类型的致动器,其构造成相对于针向远侧(由此可滑动构件相对于套管针(cannulated needle)的远侧部分延伸)并且相对于针向近侧(由此可滑动构件回缩并且相对于套管针的远侧部分固定在缩回位置)选择性地平移可滑动构件轴。
在使用中,重要的是,每当针穿过组织时,可滑动构件就保持在缩回位置。然而,在某些情况下,可滑动构件可能由于刺穿期间意外致动(例如,用户在试图刺穿组织时意外地在拇指致动器上向前推动),或者由于用户在抓握缝线后未完全关闭缝线保持特征而意外延伸。这可能导致可滑动构件卡在周围组织内,从而导致组织和器械损坏。例如,可滑动构件可能不经意地在针上向后弯曲,随其延伸路径弯曲到平面外,或以多种不同方式变形,从而导致功能不当。因此,需要防止可滑动构件的意外延伸的改进的缝线穿引器器械和方法。这些和其它行为由本公开内容解决。
发明内容
本公开试图通过提供一种用于例如,在可滑动构件处于缩回位置时选择性地锁定可滑动构件的锁定机构来克服上述问题中的至少一些。有利地,致动器的相同拨动器可以构造成使得能够延伸、缩回、锁定和解锁可滑动构件,其中拨动器的不同运动用于延伸和缩回,而非用于锁定和解锁。值得注意的是,使用相同拨动器可以例如通过允许用户用单个手指控制所有方面而不改变抓握位置来简化操作。在一些实施例中,用于锁定和解锁的运动可以构造成位于典型轴线之外,以用于移动器械以使针刺穿组织(例如,在由针限定的器械的纵向轴线之外)。这可有利地帮助防止用户在试图刺穿组织时意外锁定或解锁可滑动构件。在一些实施例中,用于锁定和解锁的运动可包括使拨动器围绕旋转轴线,例如围绕器械的纵向轴线枢转。在其它实施例中,锁定和解锁可包括例如围绕垂直于器械的纵向轴线的轴线按压或平移拨动器。在一些实施例中,例如当可滑动构件处于缩回位置时,可朝向锁定位置偏置拨动器。例如,悬臂、弹簧机构或其它偏置机构可以将拨动器维持在锁定位置,直到施加力来改变位置为止。此偏置可进一步确保防止意外地延伸可滑动构件。在示例性实施例中,可滑动构件可以仅在处于某些位置时,例如处于缩回位置(注意,在一些实施例中,可以存在多于一个缩回位置,例如,其中缝线保持在孔眼中但自由平移的第一缩回位置,以及其中缝线被夹紧的第二缩回位置)时锁定。
在示例性实施例中,公开了一种缝线穿引器装置,该缝线穿引器装置可以包括套管针、延伸穿过套管针的可滑动构件以及柄部,所述柄部附接到套管针的近侧部分并且包括与可滑动构件的近侧部分可操作地连通的致动器。致动器可有利地构造成相对于针选择性地向远侧平移可滑动构件,由此可滑动构件相对于套管针的远侧部分延伸并且相对于针向近侧延伸,由此可滑动构件相对于套管针的远侧部分缩回并固定在缩回位置中。致动器还可包括锁定机构,该锁定机构用于在可滑动构件处于缩回位置时选择性地锁定可滑动构件。值得注意的是,致动器的第一运动范围可构造成控制延伸和缩回可滑动构件,且不同于第一运动范围的第二运动范围可构造成控制锁定和解锁可滑动构件(两个运动范围均经由相同致动器实施)。在示例性实施例中,第一运动范围可以是致动器平行于针的纵向轴线的平移移动。在其它示例性实施例中,第二运动范围可以是致动器围绕针的纵向轴线的旋转移动。在其它实施例中,第二运动范围可以是致动器平行于横向于轴的纵向轴线的轴线的平移移动。
在示例性实施例中,柄部可限定提供致动器的第一平移路径的轨道,其中致动器沿着平移路径的平移控制延伸和缩回可滑动构件。在一些实施例中,轨道可相对于柄部的顶表面限定。在其它实施例中,致动器的第一平移路径可平行于套管针的纵向轴线。在一些实施例中,致动器可直接运动联接到可滑动构件。在其它实施例中,致动器可间接运动联接到可滑动构件。
在示例性实施例中,轨道可包括由柄部限定且平行于针的纵向轴线延伸的细长槽。因此,槽可构造成接收致动器的滑动部分,由此致动器可平移地安装在槽内。在一些实施例中,轨道可限定面向近侧的邻接表面,以在致动器处于锁定位置时防止致动器沿着第一平移路径的平移移动。值得注意的是,在示例性实施例中,邻接表面可由在槽的第一侧上延伸到槽中的突出部或通过槽在其第一侧上的变窄限定。在一些实施例中,邻接表面可有利地构造成抵靠致动器的远侧表面,从而在致动器处于锁定位置时防止沿着第一平移路径的平移移动。因此,其中邻接表面相对于槽的第一侧限定,锁定位置可以是致动器邻近槽的第一侧的位置。在使用中,致动器因此可构造成移动到致动器不再邻近槽的第一侧的解锁位置,由此邻接表面不再抵靠致动器的远侧表面,因此实现沿着第一平移路径的平移移动。
在一些实施例中,轨道可限定偏置机构,该偏置机构构造成使致动器朝锁定位置偏置。例如,轨道限定偏置机构,其中偏置机构是悬臂,悬臂操作成使致动器抵靠槽的第一侧偏置。值得注意的是,悬臂有时可部分地限定槽的相对的第二侧。在一些实施例中,悬臂可包括延伸到弹性柔性杆臂的端部上的槽中的突出部。以此方式,突出部可构造成抵靠致动器的一侧且向致动器的一侧施加力,从而使致动器抵靠槽的第一侧偏置。
在备选实施例中,致动器可包括可按压按钮机构,其使得能够在锁定位置与解锁位置之间切换。例如,在一些实施例中,可按压按钮机构可构造成与可按压杆臂相互作用,可按压杆臂限定邻接表面,该邻接表面构造成抵靠致动器的表面,并且当致动器处于锁定位置时防止致动器沿着第一平移路径的平移移动。
附图说明
本公开的上述和其它方面、特征和优点将从如附图所示的实例的以下更具体的描述显而易见,在附图中:
图1是根据本公开的示例性缝线穿引器。
图2A和图2B是根据本公开的图1的缝线穿引器的针的弯曲远侧区域的放大视图,其中针的内腔中的可滑动构件分别在延伸位置和缩回位置。
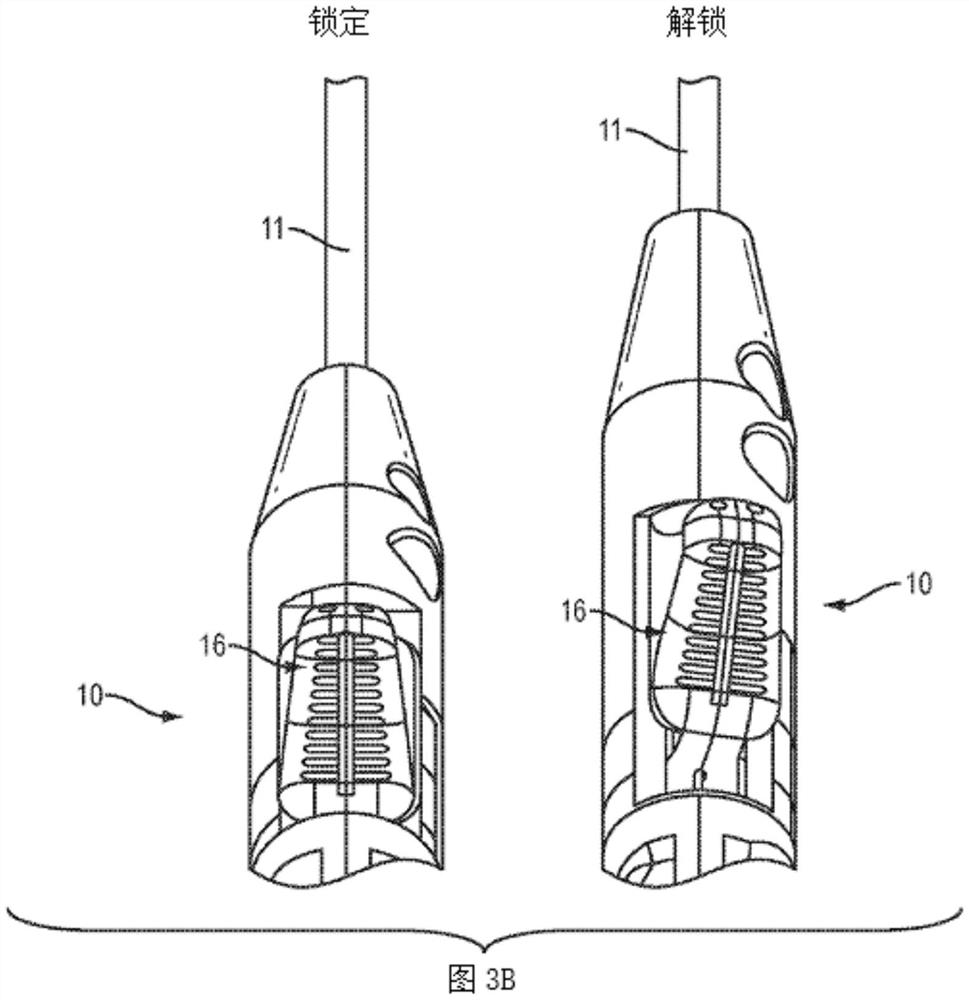
图3A-3C分别描绘了根据本公开的图1的缝线穿引器的前顶部视图和横截面视图,其中致动器在“锁定”位置与“解锁”位置之间交替。
图4A和图4B分别描绘了根据本公开的图1的缝线穿引器的柄部和滑轨的透视图和俯视图,其更详细地示出了出于清楚起见已移除了致动器的情况。
图5A、5B和5C描绘了根据本公开的可与本文中的系统和方法结合使用的致动器的备选实施例的透视图、截面视图和部件视图。
图6A和图6B示出了根据本公开的利用基于阻力的锁定机构的备选实施例。
具体实施方式
在下面的描述中,相似的部件已被赋予相同的附图标记,而不管它们是否在不同的示例中示出。为了以清楚简明的方式示出本发明的实例,附图可能不一定按比例绘制,并且某些特征可能以某种示意性形式示出。关于一个示例描述和/或示出的特征可以在一个或多个其它示例中以相同方式或以类似方式使用和/或与其它示例的特征组合或代替其它示例的特征。
如说明书中和权利要求书中所使用的,除非上下文另外明确规定,否则单数形式“一个(a)”、“一种(an)”,和“所述(the)”包括复数指代。
如说明书中和权利要求书中所使用的,出于描述和定义本发明的目的,术语“约”和“大致”用于表示可以归因于任何定量比较、值、测量或其它表示的固有不确定度。术语“约”和“大致”也在本文中用于表示定量表示可以与所述基准不同而不会导致所讨论主题的基本功能发生变化的程度。
在本文呈现的实施例的上下文中,可以设想,任何两个元件之间的相对运动可通过移动的任一或两个元件有利地实现。因此,例如,在描述了可滑动构件相对于针的平移的情况下,这旨在涵盖这样的实施例:在使针保持静止的情况下平移可滑动构件,在使可滑动构件保持静止的情况下平移针,以及使可滑动构件和针两者同时移动。类似地,手术器械与致动器之间的相对运动旨在涵盖致动器和手术器械的主体中的一者或两者移动的实施例。
参考图1,示出了示例性缝线穿引器10,其具有沿着缝线穿引器10的纵向轴线从柄部12向远侧延伸的细长轴11。在所示的实施例中,轴11包括弯曲远侧区域13和尖锐的针尖14。柄部12为直列型柄部。在一些实施例中,柄部12可以包括用于容纳用户手指的开口17。在备选实施例中,柄部不包括这样的开口,并且用户的手指简单地围绕柄部配合。柄部12还可包括致动器16,例如,呈拇指激活的拨动器的形式。
现在参考图2A和2B,缝线穿引器10包括可滑动构件15,例如缝线圈,其可滑动地接收在轴11的内腔内且可从其延伸。根据该布置,并且如图2A所示,当可滑动构件15通过致动器16向远侧推进时,如下文将更详细地描述的,可滑动构件15的一部分从管状构件突出,例如以便使得能够捕获缝线(未示出)。可滑动构件然后可回缩例如到图2B中所示的位置以固定捕获的缝线。
图3A-3C分别描绘了图1的缝线穿引器10的前顶部视图和横截面视图,其中致动器16在“锁定”位置与“解锁”位置之间交替。应当注意,尽管所描绘的实施例示出了致动器16在处于锁定位置时相对于缝线穿引器10的顶表面居中,并且在处于解锁位置时(例如,围绕轴11的纵向轴线)旋转到一侧,但是本申请不限于此类实施例。实际上,在备选实施例中,中心位置可以表示解锁位置,而侧旋转位置可以表示锁定位置。在又一些实施例中,致动器16可(例如,沿着横向于轴11的纵向轴线的轴线)平移,而不是在锁定位置与解锁位置之间旋转。因此,例如,致动器可从一侧到另一侧或上/下平移以在锁定位置与解锁位置之间切换。
应当认识到,尽管本文所述的锁定机构施加在图1和2A-2B的示例性缝线穿引器10的接触部内,但是本公开不限于此类实施方式。实际上,可以相对于手术器械上的任何致动器/拨动机构应用本文所述的锁定机构,该致动器/拨动机构基于其第一运动范围来实现该手术器械的操作。因此,举例来说,在一些实施例中,可以相对于致动器应用本文所述的锁定机构,该致动器将第一运动(例如,线性或旋转运动)范围施加到轴/杆或其它力传递机构以执行操作,例如打开和关闭手术装置的远端处的钳口或剪刀元件,延伸或缩回手术装置的远端处的切割元件,驱动、旋转、抽出、展开或取出与手术装置的远端相关联的植入物元件,等。因此,在一些实施例中,用于手术器械的致动器的第一运动范围可以实现手术器械的操作,而相同致动器的第二运动范围可以用于在锁定位置与解锁位置之间切换致动器。
再次参考图1和图2A-2B,在缝线穿引器10的上下文中,致动器16可以构造成使得致动器16的第一运动范围可操作成在轴11内选择性地延伸和缩回可滑动构件15(特别地,这可通过移动轴、可滑动构件或两者来完成)。因此,例如,在一些实施例中,可滑动构件15的近端可以直接运动联接到致动器,例如,其中平行于轴的纵向轴线前后滑动/平移致动器可操作成沿着轴的纵向轴线以相同方向/方式平移可滑动构件。因此,柄部12可限定轨道20,例如,沿着缝线穿引器10的顶表面,以用于限定致动器16的平移路径。然而,应当认识到,本公开不限于用于平移可滑动构件的致动器16的平行于轴11的纵向轴线的所述运动机构和平移运动范围。实际上,应注意,在备选实施例中,致动器16的其它运动机构/范围可用于实现可滑动构件的平移移动。例如,在一些实施例中,致动器可构造成沿横向轴线前后旋转。因此,例如,在一些实施例中,致动器16可经由间接运动联接,例如通过杆型系统或齿轮型系统相对于可滑动构件15连接。在其它实施例中,致动器可以是联接到齿条和小齿轮机构的旋钮型装置,其将旋钮的旋转移动转换成可滑动构件的线性平移。值得注意的是,致动器16的任何第一运动范围可用于实现可滑动构件的平移,只要致动器16的第一运动范围不同于用于使致动器在锁定位置与解锁位置之间切换的致动器的第二运动范围。然而,有利地,用于平移可滑动构件15和用于在锁定位置与解锁位置之间切换的两个运动范围通过相同致动器16实现。在一些实施例中,前后旋转和/或平移移动可用于平移可滑动构件15,而一侧到另一侧的旋转移动和/或平移移动可用于实现致动器的锁定/解锁。在一些实施例中,可以实现下推锁定机构或铰接锁定机构。
现在参考图4A和4B,分别更详细地示出了柄部12和轨道20的透视图和俯视图,其中为清楚起见移除了致动器。在所示实施例中,轨道20限定为柄部12中的平行于轴11的纵向轴线延伸的细长槽。槽可构造成用于接收致动器16的滑动部分,由此致动器16可以可平移地安装在槽内。致动器16的滑动部分然后可以可操作地联接到可滑动构件15的近端,使得致动器16在槽内的平移导致可滑动构件15在轴11内的对应平移移动。在所示实施例中,如本文更详细地描述,轨道20进一步限定面向近侧的邻接表面22,以用于在致动器处于锁定位置时防止致动器15的平移移动。如图所示,邻接表面22可由延伸到槽中的突出部或通过槽在其第一侧上的变窄限定。因此,在一些实施例中,在致动器16处于邻近槽的第一侧的锁定位置的情况下,邻接表面22可构造成抵靠致动器16的远侧表面,从而防止致动器沿着轨道20的平移移动。在使用中,致动器可选择性地移动(例如,旋转或平移)到致动器不再邻近槽的第一侧的解锁位置。在此位置中,邻接表面22可不再抵靠致动器,由此允许致动器16沿着轨道20平移。应注意,本申请不限于提供用于抑制平移运动的手段的邻接表面22。实际上,还可以利用其它锁定机构,包括例如突出部和凹口型构造,其中致动器上的突出部与轨道的壁中的凹口相互作用,或致动器中的凹口与来自轨道的壁的突出部相互作用,以在致动器处于锁定位置时防止致动器在槽中的平移移动。此外,在一些实施例中,例如,在使用上/下运动在锁定位置与解锁位置之间切换的情况下,轨道的上部或下部可限定邻接表面22,例如,其中沿向下方向按压/压致动器可导致致动器锁定/解锁(例如,通过抵靠邻接表面22或从邻接表面释放)。在一些实施例中,致动器16可以通过诸如螺线管的机电机构锁定/解锁,例如,螺线管可以经由致动器的特定运动范围来激活。其它锁定机构可包括棘爪/棘轮型特征。
应当认识到,在一些实施例中,偏置机构可用于将致动器偏置到锁定位置或解锁位置。因此,例如,如图4A和4B中所示,在一些实施例中,柄部20可进一步限定悬臂24,该悬臂可操作成使致动器16抵靠具有邻接表面22的轨道20的侧壁偏置。悬臂24可进一步部分地限定轨道20的相对的第二侧壁。如图所示,悬臂24可包括延伸到弹性柔性杆臂28的端部上的槽中的突出部26,该突出部可以可操作地联接到柄部12或由该柄部限定。在使用中,突出部26可构造成抵靠致动器16的一侧且向致动器的一侧施加力,从而使致动器16抵靠轨道20的与杆臂28相对的第一侧偏置。值得注意的是,本申请不限于将悬臂机构作为偏置机构的特定用途。实际上,也可以使用其它偏置装置,例如弹簧、弹性带、金属挠曲件等。而且,尽管所示偏置机构使用压缩力来偏置致动器16(例如,通过抵靠侧壁推动致动器),但应当认识到,在备选实施例中,偏置机构可改为施加张力(例如,以抵靠侧壁拉动致动器)。在又一些实施例中,致动器16可联接到可滑动悬臂或弹簧机构(例如,其随致动器移动)。这可适用于例如上/下运动,其中可滑动悬臂或弹簧机构可使致动器在第一方向上(例如,向上)偏置,在此位置,致动器可抵靠邻接表面22,以防止其沿着轨道20的平移移动。
图5A、5B和5C描绘了可与本文的系统和方法结合使用的致动器16的备选实施例的透视图、截面视图和部件视图。具体而言,图5A、5B和6C中的致动器16包括可按压按钮机构30,其使得能够在锁定位置与解锁位置之间切换。如图所示,可按压按钮机构30构造成与可按压杆臂32相互作用。更具体地,杆臂32限定邻接表面,该邻接表面将抵靠致动器16,并防止致动器16在槽33内的平移移动,除非杆臂32由按钮机构30压下。有利地,在一些实施例中,按钮机构可以在向上方向上例如经由弹簧机构等偏置。值得注意的是,本申请不限于与杆臂相互作用的按钮机构的所示实施例。例如,在一些实施例中,按钮机构可激活机电机构(例如螺线管),例如其可选择性地锁定/解锁致动器16。在其它实施例中,按钮机构可改为例如,经由凹口和突出部型相互作用而相互作用,以选择性地将致动器机构与可滑动构件15联接/分离。在又一些实施例中,按钮机构可用于使致动器16在第一方向上(例如,向上)偏置,以便抵靠邻接表面。然后,可相对于按钮机构(例如,在向下方向上)按压致动器以解锁平移移动。
图6A和图6B示出了备选锁定机构,其不是使用第二运动范围来实现致动器的锁定和解锁,而是使用基于干涉或阻力的特征来抵抗/防止沿着第一运动范围的致动,直到施加足够的力来克服这种基于干涉或阻力的特征。示例性的基于阻力/干涉的特征可包括棘爪、棘轮、干涉凸块等。因此,在图6A和6B中,沿着致动器16在第一位置与第二位置(位置1与位置2)之间的运动范围包括阻力/干涉特征40。有利地,在一些实施例中,在遇到阻力/干涉特征40之前,阻力/干涉特征40可以允许致动器16的一些运动范围(如在图6A的实施例中)。因此,致动器60可包括不需要克服特征40的阻力的部分运动范围和需要克服特征40的阻力的部分运动范围。备选地,阻力/干涉特征40可以抵抗/抑制致动器16的任何运动程度,直到施加足够的力为止(如在图6A的实施例中)。在一些实施例中,阻力/干涉特征40可以是方向特定的。因此,例如,在一些实施例中,阻力/干涉特征可抵抗致动器16在第一方向上(例如,从位置1到位置2)的运动,同时提供致动器16在第二方向上(例如,从位置2到位置1)的运动的较小阻力或无阻力。因此,例如,在致动器16与缝线穿引器(如图1和图2A-2B的缝线穿引器10)相关联的情况下,阻力/干涉特征40可构造成抵抗可滑动构件的延伸,但不抵抗可滑动构件的缩回。用于实现这一点的一个可能机构将是棘轮型机构、棘爪或阻力凸块特征,其具有更陡的斜率,并且因此在其一侧上的阻力更大。
通过参考附图考虑以下描述和所附权利要求,这些和其它特征和特性,以及相关结构元件的操作和功能的方法以及零件和制造的经济性的组合将变得更加明显,所有附图形成了本说明书的一部分,其中相同的附图标记表示各个图中的对应部分。然而,应明确地理解,附图仅出于说明和描述的目的,且不旨在作为对权利要求的限制的定义。
- 具有锁定致动器的缝线穿引器
- 具有弧形上爪的缝线穿引器