驾驶员辅助装置
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及辅助驾驶员对车辆周边的监视的驾驶员辅助装置。
背景技术
这种现有的驾驶员辅助装置(以下称呼为“现有装置”)为了辅助驾驶员对车辆周边的监视,将包括通过搭载于车辆的拍摄装置拍摄车辆的周边区域而得的拍摄图像(周边图像)的周边监视画面显示于显示装置。
专利文献1公开了一种导航装置,该导航装置向驾驶员提示用于调整导航装置的导航条件等设定而操作的操作画面。在现有装置中,也向驾驶员提示用于调整驾驶员辅助功能(例如驻车辅助功能)的工作内容而操作的操作画面(以下称呼为“自定义画面”)。
专利文献1:日本特开2005-351868号公报
发明内容
现有装置在显示周边监视画面时被要求显示自定义画面的情况下,将周边监视画面切换为自定义画面并显示。因此,在现有装置中,在显示自定义画面的期间,驾驶员无法看到周边监视画面,因此存在“辅助驾驶员对车辆周边的监视的功能”下降的可能性。在这种情况下,驾驶员难以根据画面来把握车辆的周边区域的状况变化(例如移动体和/或行人接近车辆等状况变化),因此是不期望的。
本发明是为了应对上述课题而作出的。即,本发明的目的之一在于提供一种能够降低辅助驾驶员对车辆周边的监视的功能下降的可能性的驾驶员辅助装置。以下,有时将本发明的驾驶员辅助装置称呼为“本发明驾驶员辅助装置”。
本发明驾驶员辅助装置(10)搭载于车辆(100),通过向驾驶员提示周边监视画面来辅助所述驾驶员对车辆周边的确认。
所述驾驶员辅助装置具备:检测装置(30、40、50),包括通过拍摄所述车辆的周围来获取图像信息的拍摄装置(40),所述检测装置检测由在所述车辆的周边区域存在的静止物体及移动体之中至少一者组成的引起注意对象;触摸屏(60),构成为能够显示图像;以及显示控制部(90),根据所述图像信息生成作为所述周边区域的图像的周边图像,并控制在所述触摸屏(60)显示的包括所述周边图像的画面的显示。
所述显示控制部构成为在检测到所述引起注意对象从而预定条件成立的期间,能够执行显示包括所述周边图像的引起注意画面(G5)的引起注意画面显示控制。
此外,所述显示控制部构成为在显示包括所述周边图像和自定义按钮(Btc)的周边监视画面(G3)时(在步骤1210中判定为“是”)所述自定义按钮被触摸操作的情况下(在步骤1215中判定为“是”),将所述周边监视画面切换为作为用于调整所述车辆所具备的预定的驾驶员辅助功能的工作内容的操作画面的自定义画面(G4a)并显示(步骤1220),在显示所述自定义画面时(步骤1310)所述预定条件成立的情况下(在步骤1315中判定为“是”),将所述自定义画面切换为所述引起注意画面并显示(步骤1330)。
根据本发明的驾驶员辅助装置,在显示自定义画面时预定条件成立的情况下,将自定义画面切换为引起注意画面并显示。由此,本发明的驾驶员辅助装置能够降低辅助驾驶员对车辆周边的监视的功能下降的可能性。
在上述一个方式中,所述显示控制部构成为仅在所述预定条件成立的期间,在将所述自定义画面切换为所述引起注意画面并显示后,将所述引起注意画面切换为所述自定义画面并显示(步骤1410、步骤1415、步骤1420)。
根据上述一个方式,在显示自定义画面时,仅在预定条件成立的期间,在将自定义画面切换为引起注意画面并显示后,将引起注意画面切换为自定义画面并显示。由此,本发明的驾驶员辅助装置能够降低辅助驾驶员对车辆周边的监视的功能下降的可能性,并能够确保与自定义画面的操作相关的用户的便利性。
在上述一个方式中,所述自定义按钮构成为在所述车辆处于停止状态的情况下,所述自定义按钮被设定为能够受理所述触摸操作的状态,在所述车辆不处于停止状态的情况下,所述自定义按钮被设定为不能受理所述触摸操作的状态。
在上述一个方式中,所述引起注意对象是接近所述车辆的所述车辆的周边的所述移动体,所述引起注意画面包括所述周边图像和叠加显示于所述周边图像的、表示所述移动体的接近方向的移动体方向标记。
根据上述一个方式,在车辆不处于停止状态时,无法切换为自定义画面,因此能够降低在车辆正在移动时,辅助驾驶员对车辆周边的监视的功能下降的可能性。此外,根据上述一个方式,在车辆处于停止状态时,即使在周边监视画面被切换为自定义画面并显示的情况下,能够检测在车辆处于停止状态时尤其需要引起注意的移动体,因此能够降低辅助驾驶员对车辆周边的监视的功能下降的可能性。
在上述一个方式中,
所述周边监视画面是在所述车辆所具备的驻车辅助功能处于有效状态时(在步骤1205中判定为“是”)被许可显示的驻车辅助画面,所述自定义画面是用于调整所述驻车辅助功能的工作内容的操作画面。
根据上述一个方式,能够降低在驻车辅助功能工作时辅助驾驶员对车辆周边的监视的功能下降的可能性。
在上述一个方式中,所述周边监视画面是在所述车辆所具备的全景视图监视器功能处于有效状态时(在步骤1505中判定为“是”)被许可显示的全景视图监视器画面,所述自定义画面是用于调整所述全景视图监视器功能的工作内容的操作画面。
根据上述一个方式,能够降低在全景视图监视器功能工作时辅助驾驶员对车辆周边的监视的功能下降的可能性。
在上述说明中,为了帮助理解本发明,针对与后述的实施方式对应的发明的构成,在括号中添加了在该实施方式中使用的名称和/或附图标记。然而,本发明的各构成要素不限于由所述名称和/或附图标记所规定的实施方式。
附图说明
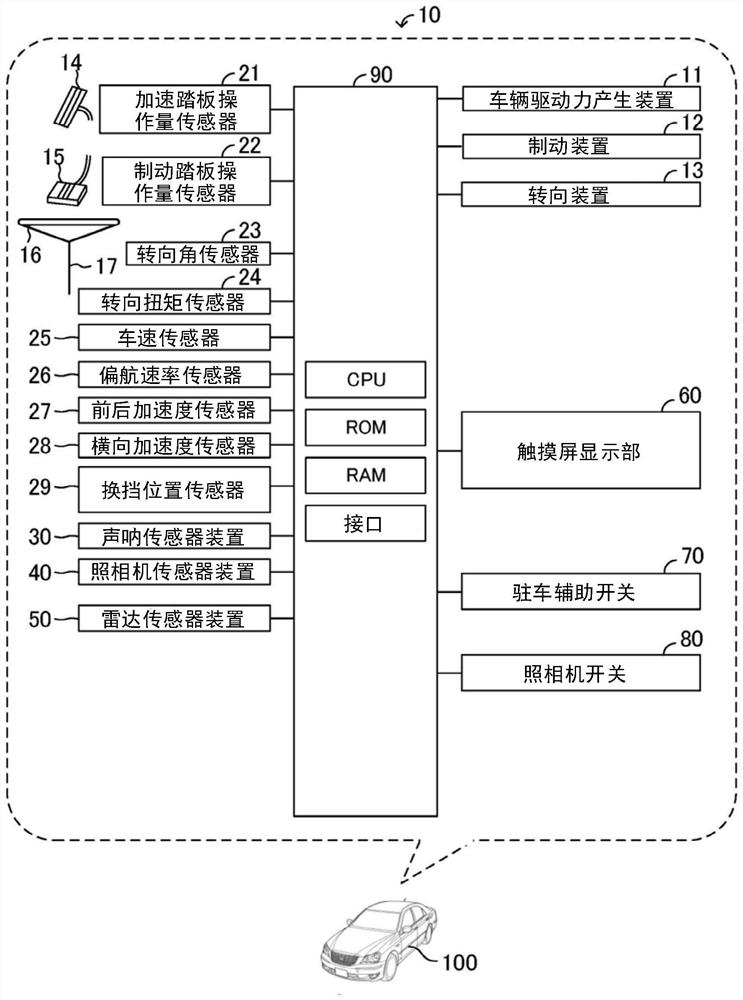
图1是示出本发明的实施方式所涉及的驾驶员辅助装置及应用该驾驶员辅助装置的车辆的图。
图2是示出声呐传感器装置的配置及检测范围的图。
图3是示出照相机传感器装置的配置及拍摄范围的图。
图4是示出雷达传感器装置的配置的图。
图5A是示出显示于触摸屏的图像的概略图。
图5B是示出显示于触摸屏的图像的概略图。
图6是示出显示于触摸屏的图像的概略图。
图7是示出显示于触摸屏的图像的概略图。
图8是示出显示于触摸屏的图像的概略图。
图9是示出显示于触摸屏的图像的概略图。
图10A是示出显示于触摸屏的图像的概略图。
图10B是示出显示于触摸屏的图像的概略图。
图11是示出显示于触摸屏显示部的图像的概略图。
图12是表示ECU的CPU执行的例程的流程图。
图13是表示ECU的CPU执行的例程的流程图。
图14是表示ECU的CPU执行的例程的流程图。
图15是表示ECU的CPU执行的例程的流程图。
图16是表示ECU的CPU执行的例程的流程图。
图17是表示ECU的CPU执行的例程的流程图。
具体实施方式
<构成>
以下,一边参照附图,一边对本发明的实施方式所涉及的驾驶员辅助装置进行说明。另外,在实施方式的所有图中,对相同或相应的部分赋予相同的附图标记。图1示出了本发明的实施方式所涉及的驾驶员辅助装置10及应用该驾驶员辅助装置10的车辆100。
如图1所示,驾驶员辅助装置10具备ECU 90。ECU是电子控制单元的简称。ECU 90具备微型计算机作为主要部件。微型计算机具备CPU、ROM、RAM、非易失性存储器及接口等。CPU构成为通过执行ROM保存的指令或程序或例程来实现各种功能。另外,ECU 90也可以由多个ECU构成。
车辆100搭载有车辆驱动力产生装置11、制动装置12及转向装置13。车辆驱动力产生装置11是用于产生用于使车辆100行驶的驱动力并将该驱动力赋予车辆100的驱动轮的装置。车辆驱动力产生装置11例如是内燃机、电动发动机等。制动装置12是用于向车辆100的车轮赋予用于将车辆100制动的制动力的装置。转向装置13是用于向车辆100的转向轮赋予用于使车辆100转向的转向扭矩的装置。
车辆驱动力产生装置11、制动装置12及转向装置13与ECU 90电连接。ECU 90通过控制车辆驱动力产生装置11的工作,来控制向车辆100的驱动轮赋予的驱动力。此外,ECU90通过控制制动装置12的工作,来控制向车辆100的车轮赋予的制动力。此外,ECU 90通过控制转向装置13的工作,来控制向车辆100的转向轮赋予的转向扭矩。
(传感器等)
驾驶员辅助装置10具备加速踏板操作量传感器21、制动踏板操作量传感器22、转向角传感器23、转向扭矩传感器24、车速传感器25、偏航速率传感器26、前后加速度传感器27、横向加速度传感器28、换挡位置传感器29、声呐传感器装置30、照相机传感器装置40、雷达传感器装置50、触摸屏显示部60、驻车辅助开关70及照相机开关80。
加速踏板操作量传感器21与ECU 90电连接。ECU 90经由加速踏板操作量传感器21检测加速踏板14的操作量AP并作为加速踏板操作量AP而获取。ECU 90以从车辆驱动力产生装置11向车辆100的驱动轮赋予与获取的加速踏板操作量AP相应的驱动力的方式,控制车辆驱动力产生装置11的工作。
制动踏板操作量传感器22与ECU 90电连接。ECU 90经由制动踏板操作量传感器22检测驾驶员对制动踏板15的操作量BP并作为制动踏板操作量BP而获取。ECU 90以从制动装置12向车辆100的车轮赋予与获取的制动踏板操作量BP相应的制动力的方式,控制制动装置12的工作。
转向角传感器23与ECU 90电连接。ECU 90经由转向角传感器23检测方向盘16相对于中立位置的旋转角度θst并作为转向角θst而获取。
转向扭矩传感器24与ECU 90电连接。ECU 90经由转向扭矩传感器24检测从驾驶员输入到转向轴17的扭矩TQst并作为转向扭矩TQst而获取。
ECU 90以向车辆100的转向轮赋予与获取的转向角θst及转向扭矩TQst相应的转向扭矩的方式控制转向装置13的工作。
车速传感器25与ECU 90电连接。ECU 90经由车速传感器25检测车辆100的各车轮的旋转速度Vrot,获取各车轮的旋转速度Vrot。ECU90基于获取的各车轮的旋转速度Vrot,获取车辆100的行驶速度SPD作为车速SPD。
偏航速率传感器26与ECU 90电连接。ECU 90经由偏航速率传感器26检测车辆100的偏航速率YR,作为车辆偏航速率YR而获取。
前后加速度传感器27与ECU 90电连接。ECU 90经由前后加速度传感器27检测车辆100的前后加速度Gx,作为车辆前后加速度Gx而获取。
横向加速度传感器28与ECU 90电连接。ECU 90经由横向加速度传感器28检测车辆100的横向加速度Gy,作为车辆横向加速度Gy而获取。
换挡位置传感器29与ECU 90电连接。检测未图示的换挡杆的位置(换挡位置)。在本例中,换挡杆的位置是驻车位置(P)、前进位置(D)及后退位置(R)。ECU 90从换挡位置传感器29收取换挡杆的位置,基于该位置控制车辆100的未图示的变速器和/或驱动方向切换机构(即控制车辆100的换挡控制。)。此外,ECU 90能够不基于驾驶员对换挡杆的操作,控制未图示的变速器和/或驱动方向切换机构,并切换换挡杆的位置。
声呐传感器装置30具备第1间隙声呐301至第12间隙声呐312。以下,根据需要,将第1间隙声呐301至第12间隙声呐312统称为“间隙声呐313”。
如图2所示,第1间隙声呐301以从车辆100的前方左端部向左前方放射超声波的方式安装于车辆100。第2间隙声呐302以从车辆100的左侧前端向前方放射超声波的方式安装于车辆100。第3间隙声呐303以从车辆100的前方右端部向右前方放射超声波的方式安装于车辆100。第4间隙声呐304以从车辆100的右侧前端向前方放射超声波的方式安装于车辆100。
此外,第5间隙声呐305以从车辆100的后方左端部向左后方放射超声波的方式安装于车辆100。第6间隙声呐306以从车辆100的左侧后端向后方放射超声波的方式安装于车辆100。第7间隙声呐307以从车辆100的后方右端部向右后方放射超声波的方式安装于车辆100。第8间隙声呐308以从车辆100的右侧后端向后方放射超声波的方式安装于车辆100。
此外,第9间隙声呐309以从车辆100的前方左侧部向左方放射超声波的方式安装于车辆100。第10间隙声呐310以从车辆100的后方左侧部向左方放射超声波的方式安装于车辆100。第11间隙声呐311以从车辆100的前方右侧部向右方放射超声波的方式安装于车辆100。第12间隙声呐312以从车辆100的后方右侧部向右方放射超声波的方式安装于车辆100。
间隙声呐313接收物体反射的超声波。
声呐传感器装置30与ECU 90电连接。声呐传感器装置30向ECU90发送与间隙声呐313放出的超声波及间隙声呐313接收的超声波等相关的信息。ECU 90基于从声呐传感器装置30接收的信息,获取与在车辆100周围存在的物体相关的信息作为“物体信息”。
在图2中,附图标记Dx所示的方向是车辆100的前后方向,以下将该方向称呼为“车辆前后方向Dx”,附图标记Dy所示的方向是车辆100的宽度方向,以下将该方向称呼为“车辆宽度方向Dy”。
照相机传感器装置40具备前方照相机41、后方照相机42、左侧照相机43及右侧照相机44。以下,根据需要,将前方照相机41、后方照相机42、左侧照相机43及右侧照相机44统称为“照相机45”。照相机45也被称呼为“拍摄装置”。
如图3所示,前方照相机41以拍摄车辆100的前方的风景的方式安装于车辆100的前端部的中央,其视角41A为约180°。后方照相机42以拍摄车辆100的后方的风景的方式安装于车辆100的后端部的中央,其视角42A也为约180°。左侧照相机43以拍摄车辆100的左侧的风景的方式安装于车辆100的左侧部,其视角43A也为约180°。右侧照相机44以拍摄车辆100的右侧的风景的方式安装于车辆100的右侧部,其视角44A也为大致180°。另外,前方照相机41也能够以相对较小的视角拍摄车辆100的前方的风景,后方照相机42也能够以相对较小的视角拍摄车辆100的后方的风景。
照相机传感器装置40与ECU 90电连接。ECU 90能够经由照相机传感器装置40获取与由各照相机45拍摄的风景的图像相关的信息。
以下,根据需要,将与由前方照相机41拍摄的风景的图像相关的信息称呼为“前方图像信息IMG1”,将与由后方照相机42拍摄的风景的图像相关的信息称呼为“后方图像信息IMG2”,将与由左侧照相机43拍摄的风景的图像相关的信息称呼为“左侧图像信息IMG3”,将与由右侧照相机44拍摄的风景的图像相关的信息称呼为“右侧图像信息IMG4”。此外,以下,根据需要,将前方图像信息IMG1、后方图像信息IMG2、左侧图像信息IMG3及右侧图像信息IMG4统称为“图像信息IMG”。
每当经过了预定时间时,ECU 90都使用前方图像信息IMG1、后方图像信息IMG2、左侧图像信息IMG3及右侧图像信息IMG4,生成周边图像信息。基于周边图像信息显示(生成)的图像被称呼为“周边图像”。周边图像是与车辆100的周围的区域的至少一部分范围对应的图像,包括照相机视点图像及合成图像等。
照相机视点图像是以照相机45的各个透镜的配设位置为视点的图像。
合成图像之一是从在车辆100的周围的任意的位置设定的虚拟视点观察车辆SV的周围而得的图像(也称呼为“虚拟视点图像”)。
该虚拟视点图像的生成方法是公知的(例如参照日本特开2012-217000号公报、日本特开2016-192772号公报及日本特开2018-107754号公报等)。另外,ECU 90也可以生成分别针对照相机视点图像和虚拟视点图像,进一步合成(重叠)了车辆图像(例如示出车辆100的形状的车辆多边形SP)、构成支持驻车动作的线等图形图像、构成支持驻车动作等的消息等文字图像而成的图像。这样的图像也被称呼为周边图像。
对作为虚拟视点图像的基础的虚拟视点图像信息的生成方法的概要简单地进行说明。ECU 90将前方图像信息IMG1、后方图像信息IMG2、左侧图像信息IMG3及右侧图像信息IMG4所包括的像素(pixel)投影于虚拟的3维空间中的预定的投影曲面(例如碗状的曲面)。
投影曲面的中心被规定为车辆100的位置。投影曲面的中心以外的部分与前方图像信息IMG1、后方图像信息IMG2、左侧图像信息IMG3及右侧图像信息IMG4对应。ECU 90将前方图像信息IMG1、后方图像信息IMG2、左侧图像信息IMG3及右侧图像信息IMG4所包括的像素的信息投影于投影曲面的中心以外的部分。
ECU 90将“表示车辆100的形状的多边形”配置于投影曲面的中心。并且,ECU 90将虚拟视点设定于虚拟的3维空间,将从虚拟视点观察时预定的可视角度所包括的投影曲面之中的预定区域作为图像信息(图像)而裁切。此外,将从虚拟视点观察时预定的可视角度所包括的“表示车辆100的形状的多边形”叠加于该裁切出的图像信息(图像)。由此,生成虚拟视点图像信息。
雷达传感器装置50具备第1至第5雷达传感器51a至51e。以下,根据需要,将第1至第5雷达传感器51a至51e统称为“雷达传感器51”。
雷达传感器51是使用毫米波段的电波的公知的传感器。雷达传感器51获取确定车辆100与立体物体之间的距离、车辆100与立体物体的相对速度、立体物体相对于车辆100的相对位置(方向)等的雷达传感器目标信息,将“雷达传感器目标信息”输出到ECU 90。
雷达传感器51(51a至51e)配设于图4所示的车辆100的预定位置,获取在以下所述的预定区域存在的立体物体的雷达传感器目标信息。
雷达传感器51a获取在车辆100的右前方区域存在的立体物体的雷达传感器目标信息。
雷达传感器51b获取在车辆100的前方区域存在的立体物体的雷达传感器目标信息。
雷达传感器51c获取在车辆100的左前方区域存在的立体物体的雷达传感器目标信息。
雷达传感器51d获取在车辆100的右后方区域存在的立体物体的雷达传感器目标信息。
雷达传感器51e获取在车辆100的左后方区域存在的立体物体的雷达传感器目标信息。
触摸屏显示部60配设于驾驶员能够视觉辨识的车辆100的部位。在本例中,触摸屏显示部60是所谓的具备导航装置的触摸屏式的显示器。
触摸屏显示部60与ECU 90电连接。ECU 90能够将包括周边图像的周边监视画面图像等各种画面图像(也简称为“画面”)显示(使得显示)于触摸屏显示部60。
驻车辅助开关70是由用户操作(按压、按下)的开关。
照相机开关80是由用户操作(按压、按下)的开关。
(驾驶员辅助功能的概要)
车辆100具备驻车辅助功能及全景视图监视器功能(以下称呼为“PVM功能”。)之中的至少一者(在本例中,两者的功能)来作为辅助驾驶员的驾驶员辅助功能。另外,在某个驾驶员辅助功能被设定为有效状态(有效)的情况下,许可与该驾驶员辅助功能对应的控制的执行。在某个驾驶员辅助功能被设定为无效状态(无效)的情况下,不许可与该驾驶员辅助功能对应的控制的执行(即禁止)。
(驻车辅助功能)
驻车辅助功能是在车辆100的驻车时或出库时通过自动地驾驶车辆100来辅助驾驶员对车辆的驻车操作(出库操作)的功能。另外,驻车辅助功能还包括将包括周边图像的周边监视画面提示给驾驶员并辅助在进行车辆的驻车动作或出库动作期间的驾驶员对车辆周边的监视的功能。
ECU 90构成为执行用于实现驻车辅助功能的控制。用于实现驻车辅助功能的控制包括在使车辆100自动地从驻车位置移动至目标驻车位置之后设定为驻车状态的自动驻车控制和在触摸屏显示部60显示合适的周边监视画面的显示控制。
(全景视图监视器功能)
在车辆100相对低速地行驶的情况下,PVM功能是通过将包括俯视图像等周边图像的周边监视画面显示于触摸屏显示部60来辅助驾驶员对车辆周边的监视的功能。ECU 90构成为执行用于实现PVM功能的控制。用于实现PVM功能的该控制包括将合适的周边监视画面显示于触摸屏显示部60的显示控制。
(移动体警报功能)
车辆100具备移动体警报功能作为引起注意功能。移动体警报功能是基于与基于雷达传感器51获取的雷达传感器目标信息及照相机45获取的拍摄图像确定的物体相关的信息(照相机目标信息),检测车辆100的整个周围的移动体(其他车辆、行人等),在检测到移动体的情况下,引起车辆100的驾驶员的注意的引起注意功能。
作为针对驾驶员的引起注意,可以列举包括周边图像的引起注意画面的显示等。ECU 90构成为执行用于实现移动体警报功能的控制。
在雷达传感器51及照相机45检测到移动体从而引起注意画面的显示条件(移动体警报画面的显示条件)成立的情况下,ECU 90将移动体警报画面显示于触摸屏显示部60作为引起注意画面。在雷达传感器51及照相机45不再能检测到移动体从而引起注意画面的显示终止条件(移动体警报画面的显示终止条件)成立的情况下,ECU 90终止在触摸屏显示部60显示的移动体警报画面的显示。
移动体警报画面包括第1移动体警报图像和第2移动体警报图像。第1移动体警报图像包括图5A所示的前方移动体警报图像Ga1及图5B所示的后方移动体警报图像Ga2这两种。
图5A所示的前方移动体警报图像Ga1包括前方照相机41的照相机视点图像Gfc、叠加显示于照相机视点图像Gfc的第1移动体方向标记MC1、第2移动体方向标记MC2及第3移动体方向标记MC3。第1移动体方向标记MC1、第2移动体方向标记MC2及第3移动体方向标记MC3是示出检测出的移动体的向车辆的接近方向(后述的第4至第14移动体方向标记MC4至MC14也同样)。虽然省略了图示,但前方移动体警报图像Ga1也可以是还将构成支持驻车动作的线等的图形图像等叠加显示于照相机视点图像Gfc而得的图像。
第1移动体方向标记MC1叠加显示于前方照相机41的照相机视点图像Gfc中的车辆100的前方中央的预定位置P1。第2移动体方向标记MC2叠加显示于前方照相机41的照相机视点图像Gfc中的车辆100的右前方的预定位置P2。第3移动体方向标记MC3叠加显示于前方照相机41的照相机视点图像Gfc中的车辆100的左前方的预定位置P3。
另外,在图5A中,在前方移动体警报图像Ga1中显示了第1至第3移动体方向标记MC1至MC3这全部的移动体方向标记,但这些第1至第3移动体方向标记MC1至MC3的显示也可以基于检测出的移动体的方位(以车辆100为基准的方位)而被控制。即,例如显示方位与在车辆100的前方检测出的移动体的方位共通的位置的移动体方向标记,不显示方位与在车辆100的前方检测出的移动体的方位不共通的位置的移动体方向标记。
图5B所示的后方移动体警报图像Ga2包括后方照相机42的照相机视点图像Gbc和叠加显示于照相机视点图像Gbc的第4移动体方向标记MC4、第5移动体方向标记MC5及第6移动体方向标记MC6。另外,虽然省略了图示,但后方移动体警报图像Ga2也可以是还将构成支持驻车动作的线等的图形图像等叠加显示于照相机视点图像Gbc而得的图像。
第4移动体方向标记MC4叠加显示于后方照相机42的照相机视点图像Gbc中的车辆100的后方中央的预定位置P4。第5移动体方向标记MC5显示于后方照相机42的照相机视点图像Gbc中的车辆100的右后方的预定位置P5。第6移动体方向标记MC6叠加显示于后方照相机42的照相机视点图像Gbc中的车辆100的左后方的预定位置P6。
另外,在图5B中,在后方移动体警报图像Ga2中显示了第4至第6移动体方向标记MC4至MC6这全部的移动体方向标记,但这些第4至第6移动体方向标记MC4至MC6的显示基于检测出的移动体的方位而被控制。即,例如显示方位与在车辆100的后方检测出的移动体的方位共通的位置的移动体方向标记,不显示方位与在车辆100的后方检测出的移动体的方位不共通的位置的移动体方向标记。
第2移动体警报图像是图6所示的整个周围移动体警报图像G1b的一个种类。如图6所示,整个周围移动体警报图像G1b包括俯视图像G1h、车辆多边形SP、和叠加显示于俯视图像G1h的第7移动体方向标记MC7、第8移动体方向标记MC8、第9移动体方向标记MC9、第10移动体方向标记MC10、第11移动体方向标记MC11、第12移动体方向标记MC12、第13移动体方向标记MC13及第14移动体方向标记MC14。另外,虽然省略了图示,但整个周围移动体警报图像G1b也可以是还将构成支持驻车动作的线等的图形图像等叠加显示于俯视图像G1h而得的图像。
第7移动体方向标记MC7叠加显示于俯视图像G1h中的车辆100的前方中央的预定位置P7。第8移动体方向标记MC8叠加显示于俯视图像G1h中的车辆100的右前方的预定位置P8。第9移动体方向标记MC9叠加显示于俯视图像G1h中的车辆100的左前方的预定位置P9。第10移动体方向标记MC10叠加显示于俯视图像G1h中的车辆100的右边的预定位置P10。第11移动体方向标记MC11叠加显示于俯视图像G1h中的车辆100的左边的预定位置P11。第12移动体方向标记MC12叠加显示于俯视图像G1h中的车辆100的后方中央的预定位置P12。第13移动体方向标记MC13叠加显示于俯视图像G1h中的车辆100的右后方的预定位置P13。第14移动体方向标记MC14叠加显示于俯视图像G1h中的车辆100的左后方的预定位置P14。
另外,在图6中,在整个周围移动体警报图像G1b中显示了第7至第14移动体方向标记MC7至MC14这全部的移动体方向标记,但这些第7至第14移动体方向标记MC7至MC14的显示基于检测出的移动体的方位而被控制。即,例如显示方位与检测出的移动体的方位共通的位置的移动体方向标记,不显示方位与检测出的移动体的方位不共通的位置的移动体方向标记。
<显示控制的概要>
(驻车辅助显示模式)
在对驻车辅助开关70在预定的定时进行预定的操作后,ECU 90将在触摸屏显示部60显示的图像的显示模式设定于驻车辅助显示模式。驻车辅助显示模式是在驻车辅助功能被设定为有效状态的情况下在触摸屏显示部60显示的图像的显示模式。
在驻车辅助显示模式中,在换挡位置为“D”或“N”的状态下,在车辆100前进或停止的情况下,ECU 90将例如图7所示的驻车辅助画面G1显示于触摸屏显示部60。
驻车辅助画面G1被划分为左侧区域(虚线In的左侧的区域)和右侧区域(虚线In的右侧的区域)。
驻车辅助画面G1的左侧区域包括左辅助图像G1L、自定义按钮Btc、图标Ic1、图标Ic2、消息MS1和消息MS2。
左辅助图像G1L包括前方照相机41的照相机视点图像G1c和由叠加显示于该照相机视点图像G1c的线等构成的支持图形图像GS1L。另外,在本例中,照相机视点图像G1c的种类例如包括作为相对窄角的照相机视点图像的普通视角图像、和作为相对广角的照相机视点图像的宽视角图像这两种图像。图7所示的照相机视点图像G1c是作为前方照相机41的相对窄角的照相机视点图像的普通视角图像。
自定义按钮Btc是由为了切换为自定义画面并显示而由用户触摸操作的图像构成的按钮。用户通过触摸显示于触摸屏显示部60的自定义按钮Btc来操作该自定义按钮Btc。该操作被称呼为“触摸操作”。通过对显示于触摸屏显示部60的自定义按钮Btc的触摸操作来产生与该触摸操作相应的操作信号。ECU 90接收该产生的操作信号。
在车辆100处于停止状态时,ECU 90将自定义按钮Btc设定为能够受理对自定义按钮Btc的触摸操作的状态。在车辆100不处于停止状态时(即车辆100运动时),ECU 90将自定义按钮Btc设定为不能受理对自定义按钮Btc的触摸操作的状态。
ECU 90基于对自定义按钮Btc的触摸操作的受理状态,以第1显示形态和第2显示形态之中的任意显示形态显示自定义按钮Btc。在处于能够受理对自定义按钮Btc的触摸操作的状态的情况下,ECU 90以第1显示形态显示自定义按钮Btc。在处于不能受理对自定义按钮Btc的触摸操作的状态的情况下,ECU 90以第2显示形态显示自定义按钮Btc。
另外,由于车辆100处于移动状态(未停止的状态),因此以第2显示形态(例如调暗色调(暗状态))显示图7的自定义按钮Btc。因此,图7的驻车辅助画面G1处于不能受理对自定义按钮Btc的触摸操作的状态。
在车辆100变为停止状态后,ECU 90设定为能够受理自定义按钮Btc的触摸操作的状态,并且将自定义按钮Btc从第2显示形态切换为块BR1中示出的第1显示形态(例如调亮色调(变亮的状态))并显示。
为了示出驻车辅助功能的工作状态而显示图标Ic1。在驻车辅助功能处于有效状态的情况下,ECU 90显示图标Ic1,在驻车辅助功能并非处于有效状态的情况下,ECU 90不显示图标Ic1。图标Ic2示出照相机视点图像G1c的照相机的种类(是前方照相机41和后方照相机42之中的哪种照相机的照相机视点图像)以及照相机视点图像G1c是相对窄角和相对广角之中的哪种照相机视点图像。ECU 90显示与照相机视点图像G1c的种类等相应的合适的图标Ic2。
消息M1及消息MS2是为了向驾驶员提示车辆的移动方向、为了辅助驾驶员对车辆周边的监视等而显示的消息(文字)。ECU 90显示与车辆100的状况相应的合适的消息M1及消息MS2。支持图形图像GS1L是为了对驾驶员对车辆周边的监视等进行支持等而显示的。
驻车辅助画面G1的右侧区域包括右辅助图像G1R。右辅助图像G1R包括俯视图像G1h、由叠加显示于俯视图像G1h的线等构成的支持图形图像GS1R、和车辆多边形SP。与支持图形图像GS1L同样,支持图形图像GS1R是为了对驾驶员对车辆周边的监视等进行支持等而显示的图形图像。
此外,在该驻车辅助显示模式下,在换挡位置为“R”的状态下,在车辆100后退或停止的情况下,ECU 90将例如图8所示的驻车辅助画面G2显示于触摸屏显示部60。
驻车辅助画面G2的左侧区域包括左辅助图像G2L、自定义按钮Btc、图标Ic1、图标Ic2、消息MS1、和消息MS2。
左辅助图像G2L包括后方照相机42的照相机视点图像G2c和由叠加显示于照相机视点图像G2c的线等构成的支持图形图像GS1L。另外,图8的照相机视点图像G2c是后方照相机42的普通视角图像。
驻车辅助画面G2的右侧区域包括右辅助图像G2R。右辅助图像G2R包括俯视图像G1h、由叠加显示于俯视图像G1h的线等构成的支持图形图像GS1R、和车辆多边形SP。
<工作的概要>
例如在显示模式为驻车辅助显示模式的情况下,在换挡位置为“D”或“N”的状态下,设想车辆100的驾驶员进行制动操作从而车辆100停止的状况。此外,在该情况下,设想移动体警报功能被设定为有效状态的状况。
在该情况下,例如设想显示了驻车辅助画面G3的状况,其中,该驻车辅助画面G3仅在图9所示的自定义按钮Btc被以第1显示形态显示这一点上与图7不同。
在这种状况的情况下,如果在驻车辅助画面G3中以第1显示形态显示的自定义按钮Btc被触摸操作,则ECU 90将在触摸屏显示部60显示的驻车辅助画面G3切换为图10A所示的自定义画面G4a,将自定义画面G4a显示于触摸屏显示部60。
自定义画面G4a是为了调整驻车辅助功能的工作内容而操作的操作画面。自定义画面G4a包括在多个框FR的各个之中显示的能够变更设定的功能的名称、为了变更功能的工作内容及功能的设定值等设定而触摸操作的功能变更按钮Bt1、为了将自定义画面切换为其他的自定义画面而触摸操作的画面切换按钮Bt2及Bt3以及返回按钮Btr等。
另外,图10B所示的自定义画面G4b是为了调整PVM功能的工作内容而操作的操作画面。在显示图10A的自定义画面G4a时,如果画面切换按钮Bt3被触摸操作,则ECU 90将图10A所示的自定义画面G4a切换为图10B所示的自定义画面G4b并显示。在显示图10B的自定义画面G4b时,如果画面切换按钮Bt2被触摸操作,则ECU 90将图10B所示的自定义画面G4b切换为图10A所示的自定义画面G4a并显示。
此外,设想在图10A所示的自定义画面G4a显示于触摸屏显示部60的情况下,引起注意功能(在本例中为移动体警报功能)处于有效状态的状况。此外,在该状况下,设想检测到从车辆100的右前方侧接近车辆100的移动体,从而引起注意画面显示条件成立的状况。
在这种情况下,ECU 90将自定义画面G4a切换为图11所示的移动体警报画面G5,将移动体警报画面G5显示于触摸屏显示部60。
移动体警报画面G5的左侧区域包括前方移动体警报图像Ga1、自定义按钮Btc、图标Ic1、图标Ic2、消息MS1、和消息MS2。
前方移动体警报图像Ga1包括前方照相机41的照相机视点图像G1c、叠加显示于照相机视点图像G1c的支持图形图像GS1L、和第2移动体方向标记MC2。照相机视点图像G1c是前方照相机41的普通视角图像。另外,照相机视点图像G1c也可以是前方照相机41的宽视角图像。第2移动体方向标记MC2叠加显示于照相机视点图像G1c中的、方位与检测出的移动体的方位(以车辆100为基准的方位)共通的车辆100的周边的预定位置(在本例中为方位与右前方的移动体共通的车辆100的右前方的预定位置P2)。
移动体警报画面G5的右侧区域包括整个周围移动体警报图像G1b。整个周围移动体警报图像G1b包括俯视图像G1h、叠加显示于俯视图像G1h的支持图形图像GS1R、第8移动体方向标记MC8及车辆多边形SP。第8移动体方向标记MC8叠加显示于俯视图像G1h中的、方位与检测出的移动体的方位共通的车辆100的周边的预定位置(在本例中为方位与右前方的移动体的方位共通的车辆100的右前方的预定位置P8)。
之后,如果移动体警报画面G5的显示终止条件成立,则ECU 90将触摸屏显示部60正在显示的图11所示的移动体警报画面G5切换为图10A所示的自定义画面G4a,再次将自定义画面G4a显示于触摸屏显示部60。
另外,在触摸屏显示部60正在显示的自定义画面G4a的返回按钮Btr被触摸操作,从而自定义画面G4a的显示终止条件成立的情况下,ECU 90将显示于触摸屏显示部60的自定义画面G4a切换为图9所示的驻车辅助画面G3,将驻车辅助画面G3显示于触摸屏显示部60。
(PVM显示模式)
在车辆100处于预定的状态时,如果照相机开关80被操作,则ECU90将显示于触摸屏显示部60的图像的显示模式设定为PVM显示模式。PVM显示模式是PVM功能被设定为有效状态的情况下显示的图像的显示模式。
在PVM显示模式中,根据照相机开关80被操作时的换挡位置,显示包括预定的周边图像的周边监视画面(以下也称呼为“PVM画面”)。PVM画面例如是包括如同从车辆周围的斜上方观察所得的合成图像或俯视图像及照相机视点图像这两者的画面。
此外,能够通过对未图示的PVM画面所包括的画面切换开关的触摸操作,将PVM画面(例如包括俯视图像及照相机视点图像的画面)切换为其他种类的PVM画面(例如包括左侧照相机43的照相机视点图像及右侧照相机44的照相机视点图像的画面)等。
<工作的概要>
例如设想在显示模式为PVM显示模式的情况下,在换挡位置为“D”或“N”的状态下,用户进行制动操作从而车辆100停止的状况。
在这种情况下,与上述驻车辅助显示模式同样,ECU 90显示包括自定义按钮Btc的PVM画面(包括俯视图像及照相机视点图像的画面(未图示))。如果该PVM画面中的自定义按钮Btc被触摸操作,则ECU90将触摸屏显示部60正在显示的PVM画面切换为图10B所示的自定义画面G4b,将自定义画面G4b显示于触摸屏显示部60。
此外,在将自定义画面G4b显示于触摸屏显示部60的期间,在引起注意功能(在本例中为移动体警报功能)处于有效状态、引起注意画面显示条件成立的情况下,ECU 90将自定义画面G4b切换为移动体警报画面,将移动体警报画面显示于触摸屏显示部60。
之后,如果移动体警报画面的显示终止条件成立,则ECU 90将移动体警报画面切换为图10B所示的自定义画面G4b,将自定义画面G4b再次显示于触摸屏显示部60。
在触摸屏显示部60正在显示的自定义画面G4b的返回按钮Btr被触摸操作,从而自定义画面显示终止条件成立的情况下,ECU 90将触摸屏显示部60正在显示的自定义画面G4b切换为PVM画面,将PVM画面显示于触摸屏显示部60。
<具体的工作>
ECU 90的CPU(以下简称为“CPU”)在每当经过预定时间时都执行图12所示的例程。
因此,CPU在预定的定时从图12的步骤1200开始处理并进行到步骤1205,判定显示模式是否为驻车辅助显示模式。
在显示模式不是驻车辅助显示模式的情况下,CPU在步骤1205中判定为“否”,进行到步骤1295,暂时终止本例程。
与之相对,在显示模式为驻车辅助显示模式的情况下,CPU在步骤1205中判定为“是”并进行到步骤1210,判定驻车辅助画面是否显示于触摸屏显示部60。
在驻车辅助画面未显示于触摸屏显示部60的情况下,CPU在步骤1210中判定为“否”并进行到步骤1295,暂时终止本例程。
在驻车辅助画面显示于触摸屏显示部60的情况下,CPU在步骤1210中判定为“是”并进行到步骤1215,判定自定义按钮Btc(以第1显示形态显示的自定义按钮Btc)是否被触摸操作。
在判定为自定义按钮Btc未被触摸操作的情况下,CPU在步骤1215中判定为“否”并进行至步骤1295,暂时终止本例程。
与之相对,在判定为自定义按钮Btc被触摸操作的情况下,CPU在步骤1215中判定为“是”,在进行了以下所述的步骤1220的处理后,进行到步骤1095,暂时终止本例程。
步骤1220:CPU将驻车辅助画面切换为自定义画面G4a,将自定义画面G4a显示于触摸屏显示部60。
CPU构成为每当经过了预定时间时都执行通过图13的流程图示出的例程。因此,CPU在预定的定时从图13的步骤1300开始处理并进行到步骤1305,判定显示模式是否为驻车辅助显示模式。
在显示模式不是驻车辅助显示模式的情况下,CPU在步骤1305中判定为“否”并进行到步骤1395,暂时终止本例程。与之相对,在显示模式是驻车辅助显示模式的情况下,CPU在步骤1305中判定为“是”并进行到步骤1310,判定自定义画面G4a是否显示于触摸屏显示部60。
在自定义画面G4a未显示于触摸屏显示部60的情况下,CPU在步骤1310中判定为“否”并进行到步骤1395,暂时终止本例程。
与之相对,在自定义画面G4a显示于触摸屏显示部60的情况下,CPU在步骤1310中判定为“是”并进行到步骤1315,判定移动体警报画面的显示条件是否成立。
在移动体警报画面的显示条件不成立的情况下,CPU在步骤1315中判定为“是”并进行到步骤1320,判定自定义画面G4a的显示终止条件是否成立。
在自定义画面G4a的显示终止条件不成立的情况下,CPU在步骤1320中判定为“否”并进行到步骤1395,暂时终止本例程。
与之相对,在自定义画面G4a的显示终止条件成立的情况下,CPU在进行了以下所述的步骤1325的处理后,进行到步骤1395,暂时终止本例程。
步骤1325:CPU将自定义画面G4a切换为驻车辅助画面,将驻车辅助画面显示于触摸屏显示部60。
在执行步骤1315的处理的时间点,在移动体警报画面的显示条件成立的情况下,CPU在步骤1315中判定为“是”,在依次执行了以下所述的步骤1330及步骤1335的处理后,进行到步骤1395并暂时终止本例程。
步骤1330:CPU将自定义画面G4a切换为移动体警报画面,将移动体警报画面显示于触摸屏显示部60。
步骤1335:将标识Xf的值设定为“1”。另外,标识Xf在车辆100的点火钥匙开关(图示省略)从关闭(OFF)位置变更为打开(ON)位置时CPU执行的初始化例程中被设定为“0”。此外,标识Xf也能够通过后述的步骤1425的处理被设定为“0”。标识Xf表示在自定义画面G4a的显示期间切换到了移动体警报画面。
CPU构成为每当经过了预定时间时都执行通过图14的流程图所示的例程。因此,CPU在预定的定时,从图14的步骤1400开始处理并进行到步骤1405,判定显示模式是否为驻车辅助显示模式。
在显示模式不是驻车辅助显示模式的情况下,CPU在步骤1405中判定为“否”并进行到步骤1495,暂时终止本例程。
在显示模式为驻车辅助显示模式的情况下,CPU在步骤1405中判定为“是”并进行到步骤1410,判定标识Xf的值是否为“1”。
在标识Xf的值不是“1”的情况下,CPU在步骤1410中判定为“否”并进行到步骤1495,暂时终止本例程。
与之相对,在标识Xf的值为“1”的情况下,CPU在步骤1410中判定为“是”并进行到步骤1415,判定自定义画面G4a的再显示条件是否成立。例如在移动体警报画面的显示终止条件成立的情况下,自定义画面G4a的再显示条件成立。
在自定义画面G4a的再显示条件不成立的情况下,CPU在步骤1415中判定为“否”并进行到步骤1495,暂时终止本例程。
与之相对,在自定义画面G4a的再显示条件成立的情况下,CPU在步骤1415中判定为“是”并在依次进行了以下所述的步骤1420及步骤1425的处理后,进行到步骤1495,暂时终止本例程。
步骤1420:CPU将移动体警报画面切换为自定义画面G4a,将自定义画面G4a显示于触摸屏显示部60。另外,此时,CPU在触摸屏显示部60显示状态与在上述步骤1330中切换为移动体警报画面之前的自定义画面G4a的状态相同的自定义画面G4a。
因此,在步骤1420中切换为自定义画面G4a的情况下,用户能够操作状态与在步骤1330中切换为移动体警报画面之前的状态相同的自定义画面G4a。由此,能够确保与自定义画面G4a的操作相关的用户的便利性。
步骤1425:CPU将标识Xf的值设定为“0”。
CPU构成为每当经过了预定时间时都执行通过图15的流程图示出的例程。图15的例程仅在以下的点,与图12的例程不同。
·代替步骤1205,执行步骤1505的处理的点。即,代替判定显示模式是否为驻车辅助显示模式,CPU判定显示模式是否为PVM模式的点。
·代替步骤1210,执行步骤1510的处理的点。即,代替判定是否正在显示驻车辅助画面,CPU判定是否正在显示PVM画面的点。
·代替步骤1220,执行步骤1520的处理的点。即,代替将PVM画面切换为自定义画面G4b,将自定义画面G4b显示于触摸屏显示部60的点。
CPU构成为每当经过了预定时间时都执行通过图16的流程图示出的例程。图16的例程仅在以下的点,与图13的例程不同。
·代替步骤1305,执行步骤1605的处理的点。即,代替判定显示模式是否为驻车辅助显示模式,CPU判定显示模式是否为PVM模式的点。
·代替步骤1325,执行步骤1625的处理的点。即,代替显示驻车辅助画面,CPU显示PVM画面的点。
CPU构成为每当经过了预定时间时都执行通过图17的流程图示出的例程。图17的流程图仅在以下的点与图14的流程图不同。
·代替步骤1405,执行步骤1705的处理的点。即,代替判定显示模式是否为驻车辅助显示模式,CPU判定显示模式是否为PVM模式的点。
<效果>
如以上所说明的,根据本发明的实施方式所涉及的驾驶员辅助装置(驾驶员辅助装置10),在显示自定义画面的情况下,在检测到接近车辆100的移动体从而预定条件成立时,将自定义画面切换为包括周边图像的移动体警报画面并显示。因此,本发明的实施方式所涉及的驾驶员辅助装置能够降低辅助驾驶员对车辆周边的监视的功能下降的可能性。
<变形例>
本发明不限于上述实施方式,能够在本发明的范围内采用各种变形例。
例如,在本实施方式中,车辆100也可以具备以下所述的功能之中的至少一个功能和移动体警报功能来作为上述引起注意功能。此外,车辆100也可以代替移动体警报功能而具有以下所述的功能之中的至少一个功能来作为上述引起注意功能。
(间隙声呐功能)
间隙声呐功能是在通过间隙声呐313检测车辆100与静止物体之间的距离并检测到静止物体的情况下(检测出的距离为预定距离以下的情况下),引起车辆100的驾驶员的注意的功能。ECU 90构成为执行用于实现间隙声呐功能的控制。
在间隙声呐313检测出静止物体(障碍物)从而引起注意画面的显示条件成立的情况下,ECU 90将用于引起对障碍物的存在的注意的引起注意画面显示于触摸屏显示部60。在间隙声呐313不再能检测出静止物体(障碍物)从而引起注意画面的显示终止条件成立的情况下,ECU90终止触摸屏显示部60正在显示的引起注意画面的显示。
(前方交叉交通警告功能)
前方交叉交通警告功能(以下称呼为“FCTA(front cross traffic alert)功能”)是如下功能:基于在车辆100的右前端设置的雷达传感器51a及在左前端设置的雷达传感器51c获取的雷达传感器目标信息,检测从车辆100的前方的左右交叉而来的其他车辆的接近,在检测到该其他车辆的情况下,引起车辆100的驾驶员的注意。ECU 90构成为执行用于实现FCTA功能的控制。
在雷达传感器51a及雷达传感器51c之中的至少一者检测到接近的其他车辆从而引起注意画面的显示条件成立的情况下,ECU 90将引起对其他车辆接近的注意的引起注意画面显示于触摸屏显示部60。在雷达传感器51a及雷达传感器51c这两者不再能检测到该其他车辆从而引起注意画面的显示终止条件成立的情况下,ECU 90终止触摸屏显示部60正在显示的引起注意画面的显示。
(后方交叉交通警告功能)
后方交叉交通警告(以下称呼为“RCTA(rear cross traffic alert)功能”)是如下功能:基于在车辆100的右后端设置的雷达传感器51d及在左后端设置的雷达传感器51e获取的雷达传感器目标信息,检测从车辆100的后方的左右交叉而来的其他车辆的接近,在检测到该其他车辆的情况下,引起车辆100的驾驶员的注意。ECU 90构成为执行用于实现RCTA功能的控制。
在雷达传感器51d及雷达传感器51e之中的至少一者检测到接近的其他车辆从而检测引起注意画面的显示条件成立的情况下,ECU 90将引起对其他车辆接近的注意的引起注意画面显示于触摸屏显示部60。在雷达传感器51d及雷达传感器51e之中的至少一者不再能检测到该其他车辆从而引起注意画面的显示终止条件成立的情况下,终止触摸屏显示部60正在显示的引起注意画面的显示。
(后方照相机侦测功能)
后方照相机侦测功能(以下称呼为“RCD(rear camera detection)功能”)是如下功能:在车辆100后退时,基于后方照相机42获取的照相机目标信息,检测在车辆100的后方的预定范围存在的行人,在检测到行人的情况下,引起车辆100的驾驶员的注意。ECU 90构成为执行用于实现RCD功能的控制。
在后方照相机42检测到行人从而引起注意画面显示条件成立的情况下,ECU 90将引起对在后方存在行人的注意的引起注意画面显示于触摸屏显示部60。在后方照相机42不再能检测到行人从而引起注意画面的显示终止条件成立的情况下,ECU 90终止触摸屏显示部60正在显示的引起注意画面的显示。
在上述引起注意功能中,在该功能处于有效状态时,也与上述实施方式同样地工作。即,在正在显示自定义画面时,如果引起注意画面的显示条件成立,则ECU 90从自定义画面切换到引起注意画面,将引起注意画面显示于触摸屏显示部60。在从自定义画面切换并显示引起注意画面时,如果引起注意画面的显示终止条件成立,则ECU 90将引起注意画面切换为自定义画面,将自定义画面显示于触摸屏显示部60。
例如,在本实施方式中,自定义按钮也可以由物理按钮构成。在这种情况下,驻车辅助画面及PVM画面也可以不包括自定义按钮Btc。此外,在这种情况下,触摸屏显示部60也可以是除了触摸屏式的显示器之外的其他类型的显示器。
10:驾驶员辅助装置;11:车辆驱动力产生装置;12:制动装置;13:转向装置、30:声呐传感器装置;40:照相机传感器装置;50:雷达传感器装置、60:触摸屏显示部。
- 具有多个超声传感器的驾驶员辅助装置、具有这样的驾驶员辅助装置的车辆、和用于操作驾驶员辅助装置的方法
- 驾驶员辅助装置、存储有驾驶员辅助程序的非暂时性存储介质和驾驶员辅助系统