一种基于滑轮轴的缆索拉力监测系统
文献发布时间:2023-06-19 10:43:23
技术领域
本发明涉及船舶结构力学测试领域,尤其是一种基于滑轮轴的缆索拉力监测系统。
背景技术
缆索绞车是各类船舶与海工平台的常用连接装置,缆索与海底或其他固定设施连接从而保证船舶在固定位置停泊或作业,对于大型船舶以及特种作业船舶,缆索的拉力通常高达2000KN以上,为了保证锚泊系统的结构安全以及合理调节锚泊力,需要感知作用于绞车滑轮上的缆索的拉力大小。
目前,测量滑轮缆索拉力的方法主要包括:(1)在缆索的一端连接拉力传感器,这种方式需要将拉力传感器布置在水下或者带缆桩的前端,布放不便,且耐久性较差;(2)在缆索上夹持应力计,但这种方式会阻碍缆索的正常收放,且需要专业人员现场安装及调试;(3)其他间接测量方式,例如在绞车上布置传感器,通过计算间接获取拉力,缺点是该方法需要定制,且需要专业人员现场施工和调试,不能实现通用化和批量部署。
发明内容
本发明人针对上述问题及技术需求,提出了一种基于滑轮轴的缆索拉力监测系统,本发明的技术方案如下:
一种基于滑轮轴的缆索拉力监测系统,包括滑轮轴组件和应力传感器,所述滑轮轴组件包括滑轮轴和安装在所述滑轮轴上的滑轮,缆索缠绕在所述滑轮上,所述滑轮轴上开设有通孔;
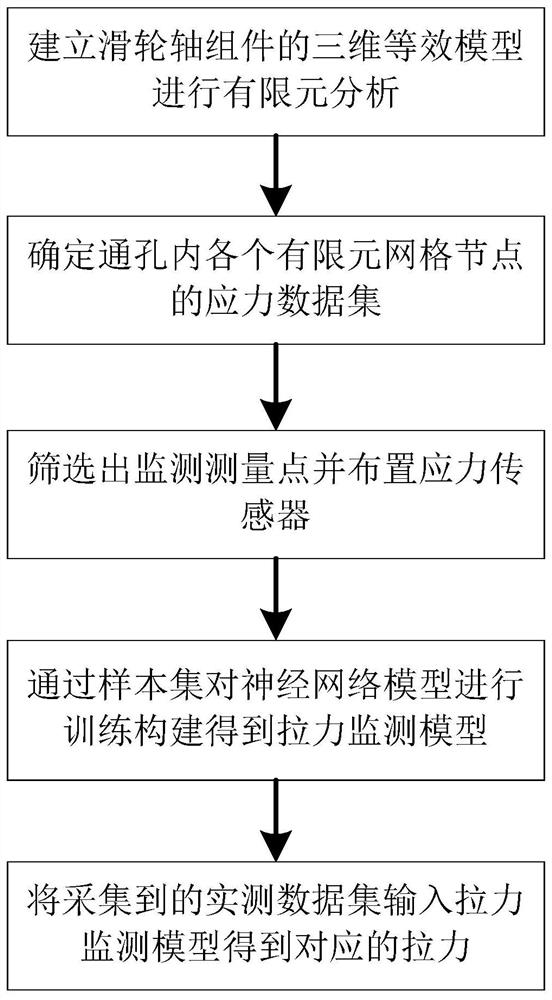
建立所述滑轮轴组件的三维等效模型并进行有限元分析,确定所述通孔的内表面上的各个有限元网格节点处的应力数据集,每个有限元网格节点处的应力数据集包括所述有限元网格节点在N个不同的加载力下的应力值,根据各个有限元网格节点处的应力数据集及任意两个有限元网格节点处的应力数据集之间的Pearson相关系数从所有有限元网格节点中筛选出监测测量点,在每个所述监测测量点处布置一个所述应力传感器;
在缆索上施加n个在预定载荷范围内的不同大小的加载力,在每个加载力下分别采集各个应力传感器的应力测量值得到样本集,利用向量化处理后的所述样本集对神经网络模型进行训练得到模型参数,并构建得到拉力监测模型;
在所述滑轮轴组件的工作过程中,采集各个应力传感器的应力测量值得到实测数据集,将向量化处理后的实测数据集输入所述拉力监测模型得到对应的缆索拉力。
其进一步的技术方案为,所述根据各个有限元网格节点处的应力数据集及任意两个有限元网格节点处的应力数据集之间的Pearson相关系数从所有有限元网格节点中筛选出监测测量点,包括:
确定初始的选取数据集包括所有有限元网格节点处的应力数据集;
从所述选取数据集中选取最大的应力数据集对应的有限元网格节点作为监测测量点;
将所述选取数据集中与最大的应力数据集之间的Pearson相关系数达到预定相关系数的应力数据集对应的有限元网格节点删除,得到更新后的选取数据集;
针对所述选取数据集再次执行所述从所述选取数据集中选取对应的应力数据集最大的有限元网格节点作为监测测量点的步骤,直至所述选取数据集为空。
其进一步的技术方案为,任意两个有限元网格节点处的应力数据集之间的Pearson相关系数的计算公式为:
r为任意两个有限元网格节点处的应力数据集X和Y之间的Pearson相关系数,j为参数,X
其进一步的技术方案为,所述利用向量化处理后的所述样本集对神经网络模型进行训练得到模型参数,包括:
将向量化处理后的所述样本集作为模型输入值输入神经网络模型得到对应的模型输出值;
根据所述模型输入值和模型输出值计算得到对应的损失函数;
根据所述损失函数和所述神经网络模型中第i层网络的网络参数计算得到第i层网络的误差值,利用第i层网络的误差值对所述第i层网络的网络参数进行更新,i为参数;
对每一层网络的网络参数更新后得到迭代更新后的神经网络模型,并对迭代更新后的神经网络模型执行所述将向量化处理后的所述样本集作为输入值输入神经网络模型得到对应的输出值的步骤,直至达到迭代终止条件。
其进一步的技术方案为,所述根据所述损失函数和所述神经网络模型中第i层网络的网络参数计算得到第i层网络的误差值,利用第i层网络的误差值对所述第i层网络的网络参数进行更新,包括:
通过链式求导法计算所述损失函数J和第i层网络的网络参数H
按照公式
其进一步的技术方案为,所述神经网络模型的第i层网络的表达式为:
Z
A
Z
按照公式
其进一步的技术方案为,第i层网络的激活函数的表达式为:
其进一步的技术方案为,所述根据所述模型输入值和模型输出值计算得到对应的损失函数,包括计算:
其中,y
其进一步的技术方案为,其特征在于,所述通孔的直径小于四分之一滑轮轴直径,所述通孔深度小于所述滑轮轴长度的二分之一。
其进一步的技术方案为,其特征在于,所述通孔上安装有螺栓,所述通孔的内壁上设置有与所述螺栓相匹配的螺纹孔。
本发明的有益技术效果是:通过本系统能够及时的获取缆索上的拉力,可以直接替换现有的普通滑轮轴,适用范围广,同时不影响缆索系统的正常收放,适合批量生产且成本较低。
附图说明
图1是本申请的流程示意图。
具体实施方式
下面结合附图对本发明的具体实施方式做进一步说明。
一种基于滑轮轴的缆索拉力监测系统,包括滑轮轴组件和应力传感器,滑轮轴组件包括滑轮轴和安装在滑轮轴上的滑轮,缆索缠绕在滑轮上。
滑轮轴是一种柱体结构,其尺寸、强度和形状根据行业标准进行设计,在滑轮轴的轴心位置上开设有通孔,在通孔内安装有应力传感器,通过算法将应力值转换为缆索的拉力数据,通孔的直径小于四分之一滑轮轴直径,通孔深度小于所述滑轮轴长度的二分之一。
同时,滑轮轴的通孔上安装有螺栓,通孔的内壁上设置有与所述螺栓相匹配的螺纹孔,选用的螺栓直径与通孔的直径相吻合,在通孔的内壁上铣出螺纹使得螺栓能够灵活拧进,由此形成一体化的滑轮轴结构,具有安装简易、水密性好以及防腐蚀的特点,另一方面能够保证滑轮轴内部的应力传感器的可维修性。
本系统所使用的应力传感器为单向应力传感器,通过应力传感器测量通孔内部的结构变形,得到该位置的剪力。单向应力传感器固定在通孔的内弧面上,单向应力传感器的数量依据后续的有限元计算结果选定。
对于本申请中的各个计算过程,建立滑轮轴组件的三维等效模型并进行有限元分析:
一、针对轴心开孔与深度进行分析:
利用滑轮轴的有限元模型计算轴心处不同开孔位置与开口深度对滑轮轴结构强度的影响,在保证结构安全的情况下确定通孔的大小、位置和深度。
二、针对滑轮轴的三维尺寸模型进行有限元分析:
一方面,校核极限载荷下的滑轮轴结构强度是否满足设计要求;另一方面,阶梯加载至极限额得到开孔表面的应力分布数据,作为测点选取算法的输入。
三、判断刚体材料是否满足设计要求:
在通过对滑轮轴通孔的开孔位置与深度选择时,需要确定当前滑轮轴刚体结构是否满足开孔要求,是否需要更换更高强度的刚体。
前面三步是本申请的前期准备工作,这部分不是本申请的重点内容,不作过多详述。
四、取通孔内表面的应力分布情况,并选择监测测量点:
通孔内表面包括有m个有限元网格节点,从m个有限元网格节点中选取k个能够准确反演缆索拉力的有限元网格节点组成监测测量点组P={P
选取思路是选择线性无关的且应力值最大的节点组成监测测量点组P,本申请通过Pearson相关系数来进行选择,Pearson相关系数是度量两个变量线性相关程度的量,每个有限元网格节点在N个不同的加载力下得到含有N个样本数据的应力数据集,N个加载力在预定载荷范围内按照相等步长增大呈阶梯型分布,其中,应力阶梯加载指的是模拟不同应力,例如总计200吨的压力,通过40个步长阶梯释放,每个步长下释放5吨的压力,从而模拟出各种状态下缆索的压力,由于有N个不同的加载力,所以此时每个有限元网格节点对应的应力数据集包含N个样本数据,每个样本数据分别为该有限元网格节点在一个加载力下得到的样本数据。
含有N个样本的任意两个应力数据集X和Y的Pearson相关系数的计算公式如下:
如上式所示,通过计算两个变量的协方差和标准差的商就可得到两个变量的Pearson相关系数,其中,r为任意两个有限元网格节点处的应力数据集X和Y之间的Pearson相关系数,j为参数,X
上述有限元计算得到的输入样本应力值是指整体应力水平最高的应力分量S3,单向应力传感器布置在此方向上。
如果Pearson相关系数r大于预定相关系数值,例如预定相关系数值为0.95,即Pearson相关系数r≥0.95,则认为两个网络节点强相关,需剔除其中一个点。
为了方便后续使用Pearson相关系数进行数据处理,计算通孔内表面的所有m个有限元网络节点每两个节点之间的Pearson相关系数得到一个相关系数矩阵,该矩阵包括m*m个元素,代表m个有限元网格节点中其中任意节点与其他所有节点的相关系数,Pearson相关系数矩阵表示为:
下面具体详述该选点步骤:
步骤一:将m个有限元网络节点处的应力数据集存入初始的选取数据集中。
步骤二:从该选取数据集中选取最大的应力数据集对应的有限元网格节点作为一个监测测量点,选取最大的应力数据集对应的有限元网络节点时,由于每一次加载力下的工况都是一样的,所有有限元网格节点处的应力都会线性变大,所以选取某一个加载力下的有限元网格节点的应力情况,通过查相关系数矩阵选取与该监测测量点强相关的所有点并删除这些点,得到更新后的选取数据集。
步骤三:循环重复步骤二,直到所有的点都被删除后,最后得到监测测量点组P={P
五、基于神经网络模型的缆索拉力反演算法:
采用神经网络模型进行训练得到模型参数,并构建拉力监测模型,其中第一层为输入层,最后一层为输出层,为了便于说明,本申请举出其中的一个具体实施例,神经网络模型包括三层神经网络,将k个监测测量点代入神经网络模型中计算,这k个监测测量点在一个加载力的应力响应组成一个样本集x={x
如果通过单个样本集完成对整个数据集的计算的话,必须通过大量的for循环,因此通过向量化的计算方式代替for循环。
下面具体详述该多层神经网络计算步骤:
步骤一:向前传播计算:将向量化处理后的样本集作为模型输入值输入神经网络模型得到对应的模型输出值。
该神经网络模型为:
Z
A
Z
具体的,三层神经网络的计算过程如下:
上式采用了三层隐藏神经网络设计,输入层有k个监测测量点在n个加载力作用下的应力值,输出层为缆索拉力的合力,同时为了防止过拟合,在网络层中加入dropout层,用于在网格中随机冻结某些节点权重。
神经网络模型中所用的激活函数g
表达式为:
ReLU激活函数可以通过简单的零阈值矩阵进行激活,并且不受饱和的影响。在和Sigmoid、Tanh函数相比时,ReLU可以大大加快随机梯度下降算法的收敛,普遍认为原因在于其具有线性、非饱和的形式。
步骤二:根据模型输入值和模型输出值计算损失函数J。
本申请中的损失函数使用MAE(平均绝对误差)函数,
表达式为:
其中,y
步骤三:误差反向传播:从输出层到输入层,根据损失函数和神经网络模型中第i层网络的网络参数计算得到第i层网络的误差值。
通过链式求导法计算所述损失函数J和第i层网络的网络参数H
步骤四:利用第i层网络的误差值对所述第i层网络的网络参数进行更新。
按照公式
因此按照公式
网络参数要减去反向传播的误差是由于反向传播的导数代表是最终输出值与真实值之差的变化率。反向传播的误差值可正可负,因此可以理解为当反向传播的误差值为正时,减小网络参数的数值,当反向传播的误差值为负时,增加网络参数的数值。这样做的目的有二:使得误差越来越小和使得误差变小的速度尽量快。
步骤五:反复迭代,直到达到迭代终止条件,迭代终止条件包括误差值达到最小值,或达到预定的迭代次数。
最终得到拉力监测模型,该拉力监测模型即为X={x(1),x(2),...,x(n)}与对应缆索拉力的合力T
X={x(1),x(2),...,x(n)}→T
在滑轮轴组件的工作过程中,采集各个应力传感器的应力测量值得到实测数据集,将向量化处理后的实测数据集输入所述拉力监测模型得到对应的缆索拉力。
以上所述的仅是本申请的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
- 一种基于滑轮轴的缆索拉力监测系统
- 基于光纤光栅传感器的桥梁缆索健康诊断在线监测系统