外科器械
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及一种外科器械,其包括把手区域,所述把手区域具有在使用位置中固定的第一把手部分和相对于第一把手部分沿调节方向可运动的第二把手部分。尤其是所述外科器械可以设计用于组织分离,例如作为组织冲裁器。已知的组织冲裁器在这里例如是所谓的Kerrison冲裁器或咬骨钳。
背景技术
开头所述类型的典型外科器械具有缺点,即,例如可以是手术医生的用户在利用外科器械费时工作时相对快速地疲劳。所述用户必须在以外科器械工作期间借助其手力多次操纵把手区域,这在一会之后就会导致其臂和手疼痛,因为肌肉疲劳。这影响其工作的精确性。例如所述器械用于在脊柱上将在神经附近的骨材料或椎间盘材料去除,从而所述器械的特别准确的操纵是重要的,以便避免神经损伤。用户经常也尝试如下帮助,即,其更换用于操纵外科器械的手。
发明内容
因此任务在于,提供一种开头所述类型的外科器械,在该外科器械中,所述缺点消除并且外科器械具有人体工程学的把手区域,所述把手区域使用户通过使用外科器械能不那么快地疲劳。
该任务按照本发明通过独立权利要求的特征解决。尤其是为了解决所述任务,提出一种开头所述类型的外科器械,其特征在于,在第二把手部分上构成至少两个彼此错开设置的铰接点,通过所述铰接点限定第二把手部分相对于第一把手部分的调节方向。通过按照本发明的设计可能的是,用户可以较长时间地以外科器械工作,因为其借此比先前已知的器械而言不那么快地疲劳。这是因为,可运动的把手部分不是围绕唯一的铰接点或转动点调节,而是围绕两个彼此错开设置的铰接点调节。因此可能的是,通过操纵第二把手部分,第二把手部分可以以平行运动或椭圆运动或偏转运动的方式移向第一把手部分并且不是如通常那样以围绕唯一的铰接点的圆周运动。在沿圆形轨道运动时,在大多开头所述类型的外科器械中,手的小指贴靠在最长的由可运动的把手部分构成的杠杆上。这些在先已知的器械通常具有V形的把手区域。其结果,必须借助小指产生最大的力消耗,以便调节可运动的把手部分。这最后会导致用户肌肉的较快速疲劳。然而开头所述类型的外科器械的几何结构原则上不可以修改,从而小指也还必须最靠近可运动的把手部分的自由端部加载。通过在本发明外科器械中的两个把手部分在操纵行程的至少一个部分路程上平行的或几乎平行的定向和/或在把手部分之间的椭圆的相对运动,手力的显著较均匀的传输是可能的。调节方向因此可以至少在操纵行程的第一半部上较直线地、尤其是几乎直线地延伸或在椭圆的轨道上延伸。
在第一和第二把手部分之间的第一路程和在第一和第二把手部分之间的第二路程之间的比例可以因此在第二把手部分朝第一把手部分的方向运动期间至少在操纵行程的第一半部上恒定或几乎恒定。在此,第一路程和第二路程可以彼此平行地延伸。备选或补充地,第一路程和第二路程可以平行于外科器械的轴接纳部和/或滑轨延伸。备选或补充地,在第一路程和轴接纳部之间的距离和在第二路程和轴接纳部之间的距离可以不同大。备选或补充地,各路程可以分别在第一把手部分上的手贴靠面和第二把手部分上的手贴靠面之间延伸。
接着说明本发明的有利设计,它们单独或结合其他设计的特征可选地可以与按照权利要求1所述的特征一起组合。
按照一种设计,第二把手部分的调节方向可以通过至少两个导向元件确定,所述两个导向元件分别通过铰接点与第一把手部分并且分别通过铰接点与第二把手部分连接,各所述导向元件在第一把手部分上的铰接点彼此错开地设置,并且各所述导向元件在第二把手部分上的铰接点彼此错开地设置。所述铰接点例如可以是被支承的转动轴。尤其是涉及仅以一个自由度可调节的和/或在转动轴承中支承的转动轴。这具有优点,即,构成可运动的第二把手部分的特别简单的引导装置,其包括尽可能少的部件。所述导向元件例如可以作为导向杆构成。例如至少一个所述导向杆或所有导向杆可以刚性、亦即尤其是非柔性地构成,以便能够实现特别良好的引导。在本申请的意义中的铰接点例如可以是在转动轴承中引导的转动轴。所述转动轴例如可以在把手部分和/或导向元件和/或驱动元件上构成。
为了还可以进一步提高外科器械的行程,而无须扩大在初始位置中在两个把手部分之间的距离,外科器械可以具有驱动元件,所述驱动元件通过支承点与第二把手部分连接和/或通过支承点与第一把手部分连接。所述至少一个支承点或两个支承点例如可以是铰接点。特别有利的可以是游动的铰接点,例如当第二把手部分从打开位置运动到关闭位置中和反之时所述铰接点可以在导向区段内游动。所述导向区段可以在此例如作为长孔、尤其是作为直的或弯曲的长孔设计,在至少两个自由度中可运动的、沿导向区段游动的转动轴在所述长孔中引导。例如驱动元件在第一把手部分和/或第二把手部分上的所述一个支承点或所述多个支承点可以相对于所述导向元件中的至少一个导向元件在第一把手部分和/或第二把手部分上的铰接点、例如已经所述的铰接点错开地设置。所述驱动元件例如可以作为驱动杆构成。为了能够通过驱动杆实现特别良好的力传递,所述驱动杆可以刚性、亦即尤其是非柔性地构成。
为了可以设计在把手部分之间的最小可能的距离时外科器械的尽可能大的行程,可以按照另一种设计规定,所述导向元件中的至少一个导向元件和/或一个驱动元件、例如已经之前所述的驱动元件具有弯曲部。在此可以特别有利的是,所述至少一个导向元件和/或所述驱动元件朝第一和/或第二把手部分的方向倾斜。
按照一种进一步构成,所述外科器械可以具有轴,所述轴包括导轨和相对于导轨可调节的滑轨,在操纵第二把手部分时,进行从至少一个导向元件和/或从驱动元件、例如已经之前所述的驱动元件到轴的滑轨上的力传递。尤其是所述轴可以具有切割和/或冲裁工具。外科器械的行程因此可以参照在滑轨和导轨之间的最大的相对的调节行程。
为了可以实现装入轴接纳部中的轴的一部分的尽可能直线或精确直线的调节,可以有利的是,外科器械具有平衡装置,嵌接销嵌接到所述平衡装置中并且接触平衡装置的加载面,其中,在操纵第二把手部分时,嵌接销的圆周运动转化或可转化为平衡装置的直线运动。例如这样,即,嵌接销在加载面上的接触点沿横向于或垂直于所述直线运动的方向沿加载面游动。所述平衡装置例如可以构成在外科器械的滑轨上。所述嵌接销例如可以构成在驱动元件上。
为了固定平衡装置沿直线移动方向的调节,平衡装置可以固定地与滑轨连接。固定连接可以在此尤其是表示在张角方面不可调节。尤其是平衡装置可以这样设计,使得在此在加载面和滑轨之间的角度在外科器械的操纵期间保持不变。这允许特别有效的手力传递,因为手力几乎完全可转化或在操纵过程期间转化为直线的调节力。
按照另一种设计,在第一把手部分和/或第二把手部分上可以构成沉入空隙,以用于将至少一个导向元件沉入第一和/或第二把手部分中。因此可以尽可能大地设计把手部分之间的操纵行程,而无须提高把手部分之间的距离。在关闭位置中,导向元件和/或驱动元件穿透到沉入空隙中,从而把手部分尽可能近地可移向彼此。这具有优点,即,外科器械的行程还可以较大地设计。
为了避免把手部分借助手力回位到打开位置中,所述外科器械可以按照另一种设计具有回位元件、例如回位弹簧,所述回位元件的回位力抑制第一把手部分朝第二把手部分的相对运动。为了构成回位元件的可靠的引导和支承,可以在一个所述导向元件上构成回位元件接纳部,回位元件嵌入所述回位元件接纳部中。例如所述回位元件可以作为螺旋扭力弹簧构成,所述螺旋扭力弹簧的转动中心在一个所述导向元件在第一把手部分上的铰接点上构成和/或与所述铰接点重叠。
为了可以将在打开位置和/或关闭位置中两个把手部分之间的距离保持尽可能小,可以在所述导向元件上分别构成两个、尤其是具有不同定向的贴靠面,其中,两个导向元件的第一对贴靠面在最大的打开位置中彼此贴靠并且第二对贴靠面在最大的关闭位置中彼此贴靠。
按照一种设计,一个驱动元件、例如已经之前所述的驱动元件在第一把手部分上的一个支承点、例如已经之前所述的支承点可以比导向元件在第一把手部分上的铰接点进一步远离一个轴接纳部、例如已经之前所述的轴接纳部和/或一个轴、例如已经之前所述的轴设置。因此可设计特别大的行程。
为了减少驱动元件、例如已经之前所述的驱动元件的空间需求,所述驱动元件可以至少部分地设置在一个导向元件中的空隙中。因此,驱动元件可以在所述空隙上至少部分地穿透到该导向元件中。包括空隙的导向元件可以横向至少部分地和/或在两侧处于驱动元件侧翼。
为了便利于尤其是对于具有相对小的手的人抓紧和操纵外科器械,第二把手部分的自由端部可以在初始位置中朝第一把手部分的方向倾斜。备选或补充地,第二把手部分的自由端部可以在初始位置中比第二把手部分的把手中点更靠近第一把手部分。
为了可以再次使用外科器械,可以有利的是,所述器械由一种可高压灭菌的材料或多种可高压灭菌的材料制造。因此器械通过120℃以上的温度消毒是可能的。例如所述外科器械可以由一种金属或多种金属制造。
为了可以还进一步提高外科器械的行程,而无须扩大两个把手部分之间的距离,可以按照另一种设计规定,在至少一个导向元件上构成转动轴空隙。如果第二把手部分移向第一把手部分,则导向部件可以以转动轴空隙在关闭位置中引导到特别靠近驱动元件在第二把手部分上的转动轴,因为驱动元件的转动轴穿透到转动轴空隙中。
本发明此外涉及外科器械的应用,以用于使切割和/或冲裁工具运动,如其在这里说明并且要求保护的那样。外科器械的特别省力的操作因此是可能的,如之前已经详细解释的。
附图说明
本发明现在借助实施例进一步说明,然而不限制于所述实施例。其他实施例通过单个或多个权利要求的特征彼此和/或与实施例的单个或多个特征的组合得出。
其中:
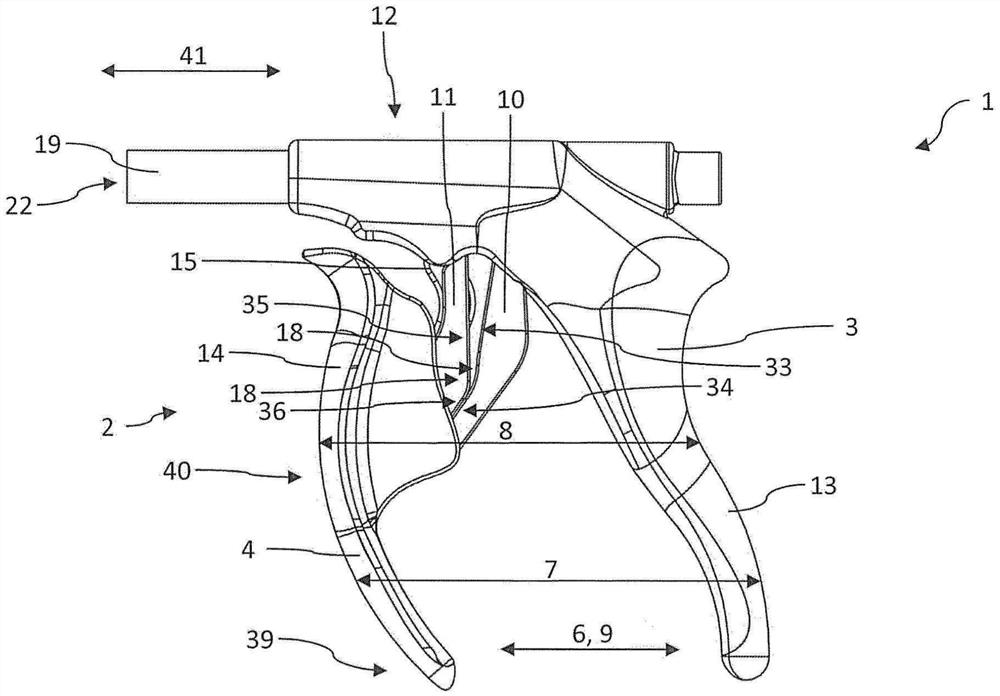
图1示出按照本发明的外科器械的一种可能的设计形式的侧视图,其中所述器械在打开位置、亦即初始位置中示出;
图2示出图1中的外科器械的透视图;
图3示出之前所述图中的外科器械的等轴视图,包括部分打开的壳体;
图4示出图3中的外科器械的另一个等轴视图;
图5示出图3和4中的外科器械的另一个等轴视图;
图6示出之前所述图中的外科器械的另一个等轴视图;
图7示出之前所述图中的外科器械的剖视图;
图8示出之前所述图中的部分透明示出的外科器械的侧视图。
具体实施方式
在图1至8中示出外科器械的一种可能的实施形式,其整体上以1表示。
所述外科器械1具有把手区域2,所述把手区域允许用户保持并且操作外科器械1。
把手区域2具有第一把手部分3和第二把手部分4。第一把手部分3作为固定的、亦即在用户使用时固定的把手部分设计。第二把手部分4可运动地支承,从而其在使用位置中相对于第一把手部分3沿调节方向由用户可调节。在外科器械1使用期间对第二把手部分操纵时因此出现第二把手部分4朝第一把手部分3的方向的运动。
在第二把手部分4上构成至少两个彼此错开设置的铰接点5、17,通过所述铰接点,第二把手部分4相对于第一把手部分3的调节方向6固定,因为第二把手部分4围绕两个铰接点5可运动地设置。
通过在第二把手部分4上设计两个铰接点5、17而可以避免第二把手部分4围绕唯一的转动轴的单纯的转动运动。因此可以更好地进行手力传递。相反,第二把手部分4通过操纵通过围绕两个铰接点5、17的偏转而移向第一铰链部件3。
第二把手部分4朝第一把手部分3的方向的之前所述的调节方向6通过至少两个导向元件10、11固定。第一导向元件10通过一个铰接点5与第一把手部分3并且通过一个铰接点5与第二把手部分4连接。第二导向元件11通过一个铰接点5与第一把手部分3并且通过一个铰接点5与第二把手部分4连接。
第一导向元件10的铰接点5和第二导向元件11的铰接点5分别在第一把手部分3上彼此错开地设置。第一导向元件10的铰接点5和第二导向元件11的铰接点5分别在第二把手部分4上同样彼此错开地设置。
所述铰接点5例如可以是在转动轴承中引导的旋转轴。
按照图1至8的外科器械1进一步具有驱动元件15,所述驱动元件通过支承点16与第二把手部分4连接。所述支承点16可以如在图3至8中示出那样例如作为具有游动的转动轴的铰接点17构成。所述转动轴可以在这里例如在作为长孔38设计的导向区段中设置。驱动元件15的第二端部与第一把手部分3通过铰接点5连接。
然而也可设想如下设计,在所述设计中,驱动元件15通过例如分别具有游动的转动轴的两个支承点16支承并且与把手部分3、4连接。通过游动的转动轴的设计,外科器械1的总行程还可以进一步提高,而无须提高两个把手部分3、4之间的距离。支承在例如作为长孔38设计的导向区段中的转动轴可以在图3至8中示出的外科器械1中因此从在外科器械1打开位置中的尤其是上面的第一止挡位置游动到在外科器械1关闭位置中的尤其是下面的第二止挡位置。
驱动元件15在第二把手部分4上的支承点16相对于两个导向元件10、11在第二把手部分4上的铰接点5错开地设置。因此可以借助驱动元件15实现显著较大的操纵行程9,所述操纵行程构成外科器械1的行程。
两个导向元件10、11和驱动元件15分别具有一个弯曲部18。如在图1至8中良好可看出的,导向元件10、11和/或驱动元件15可以基于弯曲部18朝第二把手部分4的方向倾斜。
外科器械1进一步具有轴19,所述轴设置在已经之前所述的轴接纳部12中。所述轴19具有导轨20和相对于导轨20可调节的滑轨21。所述滑轨21可以在此例如相对于固定的导轨20可运动地设计。所述导轨20可以固定地与第一把手部分3连接,尤其是这样连接,使得在使用位置中,在第一把手部分3和导轨20之间不能相对运动。
在操纵第二把手部分4时,从驱动元件15到轴19的滑轨21上的力传递是可能的。
为了避免可以通过驱动元件15的圆周运动引起的滑轨21从导轨20的提起,外科器械1具有平衡装置23。平衡装置23具有包括加载面25的接纳空间。嵌接销24导入平衡装置23的接纳空间中,所述嵌接销在接触点26中接触加载面25。到平衡装置23接纳空间中的导入方向在此优选垂直于平衡装置23的优选直线的调节运动41定向。通过操纵第二把手部分4,嵌接销24在加载面25上的接触点26沿倾斜或垂直于平衡装置23的优选直线的调节方向41游动。由此从驱动元件15到加载面25上的力传递是可能的。嵌接销24的旋转运动可以因此转化为平衡装置23的线性运动41。
平衡装置23固定地与滑轨21连接,从而滑轨21与平衡装置23一起沿优选直线的移动方向41通过操纵第二把手部分4可调节。
在加载面25和滑轨21之间的角度和/或在加载面25和移动方向41之间的角度在第二把手部分4的操纵期间保持不变。仅嵌接销24与加载面25的接触点26和/或嵌接销24尤其是在平衡装置23内的定向可以在第二把手部分4的操纵期间改变。所述嵌接销24可以具有优选圆柱形的头部件,所述头部件具有圆的横截面,通过所述头部件,嵌接销24通过加载面25的加载而与所述加载面建立接触点26。
为了可以将两个把手部分3和4之间的距离保持尽可能小,在第一把手部分3和第二把手部分4上分别构成沉入空隙27、28。在关闭位置中,亦即当在第一把手部分3和第二把手部分4之间的距离最小时,导向元件10、11和/或驱动元件15沉入在第一把手部分3和第二把手部分4上的沉入空隙27、28中。
为了可以在不用施加手力的情况下将外科器械1从其关闭位置往回复位到其打开位置中、亦即第一把手部分3和第二把手部分4最大地彼此远离的位置中,外科器械1具有回位元件29。回位元件29的回位力抑制外科器械1的关闭运动。
为了实现回位元件29的特别可靠的支承,在第一导向元件10上构成回位元件接纳部30,回位元件29装入所述回位元件接纳部中。
通过回位元件29,第一导向元件10支撑靠到第一把手部分3上。回位元件29可以如在图1至8中示出那样例如作为弹簧、尤其是作为螺旋扭力弹簧31构成。螺旋扭力弹簧31的旋转中心可以在此如在图3至8中良好可看出那样对应于第一导向元件10在第一把手部分3上的铰接点5或与该铰接点重叠。
第一导向元件10具有上面的贴靠面33和下面的贴靠面34。第二导向元件11具有上面的贴靠面35和下面的贴靠面36。在外科器械1的打开位置中,两个贴靠面34和36彼此贴靠。在关闭位置中,两个贴靠面33和35彼此贴靠。
驱动元件15在第一把手部分3上的铰接点5比导向元件10、11在第一把手部分3上的铰接点5进一步远离轴接纳部12和/或轴19设置。因此驱动元件15的作用到平衡装置23上的杠杆尽可能长地构成,以便实现外科器械1的尽可能大的行程。
驱动元件15至少部分地在第二导向元件11上的空隙37中设置。因此第二导向元件11通过其分开的设计分别以一部分至少部分地横向置于驱动元件15两侧。
第二把手部分4的自由端部39在初始位置中朝第一把手部分3的方向倾斜,从而用于手的要放置在自由端部39附近或上的小指的操纵行程9保持尽可能小。
第二把手部分4的自由端部39因此在初始位置、亦即打开位置中比第二把手部分4的把手中点40更靠近第一把手部分3。把手中点40大致设置在第二把手部分4上的手贴靠面14的一半路程上。
在第二导向元件11上构成转动轴空隙42,驱动元件15的支承点16的转动轴在外科器械1的关闭位置中嵌接到所述转动轴空隙中。
第一把手部分3例如在手贴靠面13上弯曲,亦即非直线地构成。尤其是第一把手部分3具有S形。在第一把手部分3的手贴靠面13上可以构成鱼际空隙。
第二把手部分4例如在手贴靠面14上弯曲地设计。尤其是第二把手部分4具有C形或S形。
在这里所述并且要求保护的外科器械特别适合用于使切割和/或冲裁工具22运动。所述切割和/或冲裁工具22可以在此例如与滑轨21连接,如在图1至8中表示的。
因此,本发明尤其是涉及外科器械1,所述外科器械包括把手区域2,所述把手区域具有在使用位置中固定的第一把手部分3和相对于第一把手部分3沿调节方向6可运动的第二把手部分4,在第一把手部分3和第二把手部分4之间的第一路程7和在第一把手部分3和第二把手部分4之间的第二路程8之间的比例在第二把手部分4朝第一把手部分3的方向运动期间至少在操纵行程9的部分区域上恒定或几乎恒定。
附图标记列表
1 外科器械
2 把手区域
3 第一把手部分
4 第二把手部分
5 铰接点
6 调节方向
7 第一路程
8 第二路程
9 操纵行程
10 第一导向元件
11 第二导向元件
12 轴接纳部
13 在第一把手部分上的手贴靠面
14 在第二把手部分上的手贴靠面
15 驱动元件
16 支承点
17 包括游动的转动轴的铰接点
18 弯曲部
19 轴
20 导轨
21 滑轨
22 切割和/或冲裁工具
23 平衡装置
24 嵌接销
25 加载面
26 接触点
27 在第一把手部分上的沉入空隙
28 在第二把手部分上的沉入空隙
29 回位元件
30 回位元件接纳部
31 螺旋扭力弹簧
32 螺旋扭力弹簧的旋转中心
33 第一导向元件的上面的贴靠面
34 第一导向元件的下面的贴靠面
35 第二导向元件的上面的贴靠面
36 第二导向元件的下面的贴靠面
37 在导向元件上的空隙
38 导向区段;长孔
39 第二把手部分的自由端部
40 第二把手部分的把手中点
41 平衡装置的(直线的)运动;移动方向
42 转动轴空隙
- 用于手持式外科器械的照明装置、用于具有照明装置的外科器械的皮套以及包含外科器械和照明装置的套件
- 高频外科器械的软管连接器、HF外科器械的手柄和将用于HF外科器械的软管与这种软管连接器连接的方法