一种电液混合双足机器人驱动系统
文献发布时间:2023-06-19 10:49:34
技术领域
本发明属于双足机器人驱动领域,尤其涉及一种电液混合双足机器人驱动系统。
背景技术
目前双足机器人驱动方式多采用电机驱动或液压驱动,存在电机驱动输出扭矩小,以及液压驱动能量效率低的问题。
电机驱动式机器人通过电机和减速器驱动关节旋转。这种驱动方式因为尺寸较小、价格低廉、使用方便以及控制精确而受到广泛的欢迎。然而,电机输出扭矩小、重量大,需要采用大传动比的减速器,导致机器人运动速度下降,且抗冲击载荷能力较差,因此不适用于高速运动及地形复杂的工况。
液压驱动具有较高的功率密度,同时不需要齿轮传动,可以吸收较大的冲击载荷,具有较高的抗冲击鲁棒性以及较大的刚度和带宽。然而,液压系统能量效率较低,发热严重,成为限制其发展的重要因素之一。
发明内容
本发明的目的在于针对现有技术的不足,提供一种电液混合双足机器人驱动系统。
本发明的目的是通过如下技术方案来实现:一种电液混合双足机器人驱动系统,所述电液混合驱动系统包括髋部偏航驱动单元、踝关节驱动单元、髋部翻转驱动单元、髋关节驱动单元、膝关节驱动单元和液压动力源组成,所述髋部偏航驱动单元、髋部翻转驱动单元和踝关节驱动单元由电机驱动,髋关节驱动单元和膝关节驱动单元由液压驱动。
进一步地,还包括液压动力源,所述液压动力源包括油箱、高压储能单元、低压储能单元、液压泵、油源压力匹配单元和负载压力匹配单元,髋关节驱动单元和膝关节驱动单元通过负载压力匹配单元选择与高压储能单元或低压储能单元相连接,液压泵吸油口通过液压管路与油箱相连接,液压泵出油口通过油源压力匹配单元选择与高压储能单元或低压储能单元相连接。
进一步地,根据电液混合驱动系统参数整定方法,计算优化的高压储能单元工作压力和低压储能单元工作压力以及液压泵的输出流量,包括如下步骤:
(1)建立双足机器人运动学和动力学模型,根据双足机器人姿态及质量属性,得到髋关节和膝关节的运动状态及驱动力矩的变化规律。
(2)建立电液混合驱动系统的数学模型,根据髋关节和膝关节的运动状态及驱动力矩计算髋关节驱动单元和膝关节驱动单元的需求压力和流量,高压储能单元的工作压力设定为髋关节驱动单元和膝关节驱动单元的最高需求压力。
(3)建立液压动力源消耗能量的无量纲成本函数,通过迭代优化得到使成本函数取得全局最小值的低压储能单元工作压力和液压泵输出流量。
进一步地,步骤(3)中液压动力源消耗能量的无量纲成本函数为:
式中,p
进一步地,通过调整k的值调整Δt
进一步地,双足机器人运动时,启动液压动力源的液压泵,使液压泵将油箱内的液压油充入高压储能单元或低压储能单元中,使高压储能单元和低压储能单元内的压力达到设定的工作压力。而后,液压驱动单元通过负载压力匹配单元接入高压储能单元或低压储能单元,以驱动对应关节完成设定动作。同时电机驱动单元驱动对应关节共同完成双足机器人腿部动作。
与现有技术相比,本发明具有如下有益效果:本发明的双足机器人电液混合驱动方法充分考虑了双足机器人运动过程中各关节负载特性,对于大负载关节采用液压驱动,提高关节驱动力和抗冲击能力,对于小负载关节采用电机驱动,减少驱动系统能量消耗,电机驱动单元和液压驱动单元布置在髋部和大腿,减小转动惯量,便于机器人控制,通过电液混合驱动系统参数整定,减小驱动系统能量消耗,提高驱动系统能量密度,从而实现电液混合驱动系统高效驱动的目的。
附图说明
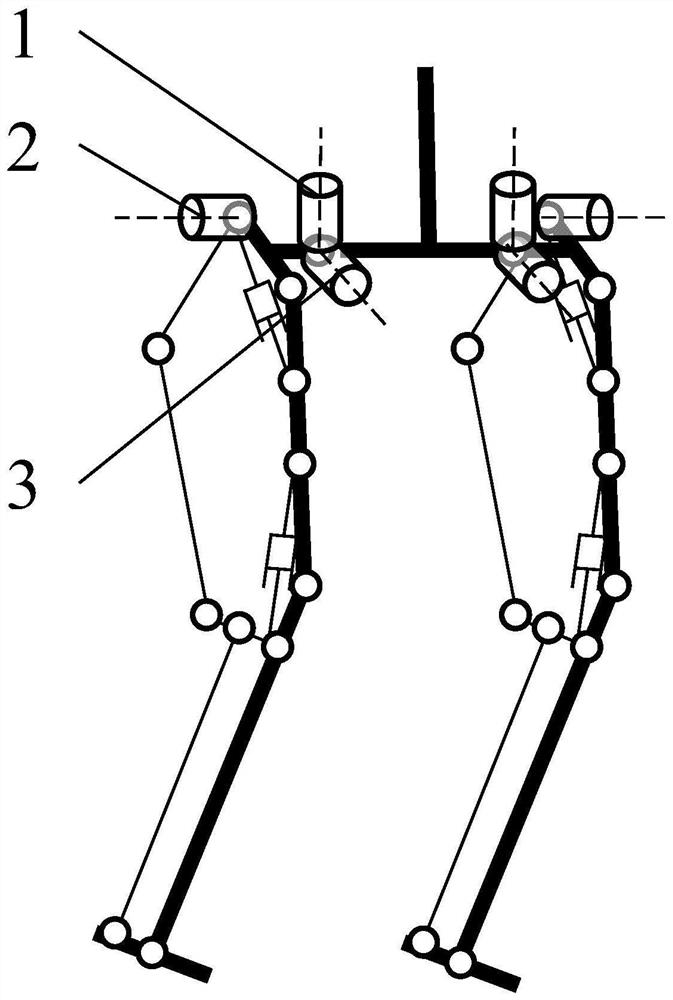
图1是本发明的整体结构示意图;
图2是本发明的单腿结构示意图;
图3是液压动力源结构示意图;
图4是电液混合驱动系统液压原理图;
图中:1.髋部偏航驱动单元;2.踝关节驱动单元;3.髋部翻转驱动单元;4.髋关节驱动单元;5.膝关节驱动单元;6.油箱;7.高压储能单元;8.低压储能单元;9.液压泵;10.油源压力匹配单元;11.负载压力匹配单元。
具体实施方式
下面根据附图和优选实施例详细描述本发明,使得本发明的目的和效果变得更加明白,应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
如图1、2所示,本发明一种电液混合双足机器人驱动系统,包括髋部偏航驱动单元1、踝关节驱动单元2、髋部翻转驱动单元3、髋关节驱动单元4、膝关节驱动单元5和液压动力源组成。其中,髋部偏航驱动单元1、髋部翻转驱动单元3和踝关节驱动单元2均由电机驱动,髋关节驱动单元4和膝关节驱动单元5由液压驱动。
如图3所示,液压动力源包括油箱6、高压储能单元7、低压储能单元8、液压泵9、油源压力匹配单元10和负载压力匹配单元11。其中,如图4所示,髋关节驱动单元4和膝关节驱动单元5通过负载压力匹配单元11选择连接高压储能单元7或低压储能单元8,液压泵9吸油口通过液压管路与油箱6相连接,液压泵9出油口通过油源压力匹配单元10选择连接高压储能单元7或低压储能单元8。
根据电液混合驱动系统的参数整定方法,计算优化的高压储能单元工作压力和低压储能单元工作压力以及液压泵的输出流量,包括如下步骤:
(1)建立双足机器人运动学和动力学模型,根据双足机器人姿态及质量属性,得到髋关节和膝关节的运动状态及驱动力矩的变化规律;
(2)建立电液混合驱动系统的数学模型,根据髋关节和膝关节的运动状态及驱动力矩计算髋关节驱动单元4和膝关节驱动单元5的需求压力和流量,高压储能单元7的工作压力设定为髋关节驱动单元4和膝关节驱动单元5的最高需求压力;
(3)建立液压动力源消耗能量的无量纲成本函数,通过迭代优化得到使成本函数取得全局最小值的低压储能单元8工作压力p
式中,J
双足机器人运动时,启动液压动力源的液压泵9,使液压泵9将油箱6内的液压油充入高压储能单元7或低压储能单元8中,使高压储能单元7和低压储能单元8内的压力达到设定的工作压力。而后,液压驱动单元(髋关节驱动单元4和膝关节驱动单元5)通过负载压力匹配单元11接入高压储能单元7或低压储能单元8,以驱动对应关节完成设定动作。同时电机驱动单元(髋部偏航驱动单元1、髋部翻转驱动单元3和踝关节驱动单元2)驱动对应关节共同完成双足机器人腿部动作。
本领域普通技术人员可以理解,以上所述仅为发明的简单实例而已,并不用于限制发明,凡在发明的精神和原则之内,所做的修改、等同替换等均应包含在发明的保护范围之内。
- 一种电液混合双足机器人驱动系统
- 一种轮式移动机械及其并联式油电液混合驱动系统和驱动方法