一种激光雷达结合振动信号的智能矿石识别方法和装置
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及光电成像、图像处理和目标检测技术领域,具体涉及一种激光雷达结合振动信号的智能矿石识别方法和装置。
背景技术
在工业领域中,尤其是基于传送带的目标检测与识别领域,物体分割、定位、识别等步骤是必不可少的,但是这些步骤的实现通常建立在没有背景噪声干扰的清晰图像上。对于普通的CCD,在背景较为复杂的时候,用算法去除图像背景噪声往外达不到一个理想的效果,使得物体分割和定位的难度提高,最终导致识别率降低。
现存矿石识别方法的适用性和稳定性较差,对矿石表面洁净程度的要求较高。对于比如煤和矸石这类物理属性相差较大的矿石,当其体积相似时,下落冲击产生的振动信号会有较大差异。近几年国内有部分学者开展了基于振动信号识别矿石的研究,但是由于相关理论的缺失和生产现场的限制,严重制约了基于振动信号识别矿石的工程化进展。
因此目前亟需一种能够弥补单一振动信号识别矿石的缺陷的矿石识别方案。
发明内容
有鉴于此,本发明提供了一种激光雷达结合振动信号的智能矿石识别方法和装置,能够利用激光雷达采集的距离回波点云得到矿石的体积特征,利用体积特征弥补单一振动信号识别矿石的缺陷,具有工程化意义。
为达到上述目的,本发明的技术方案包括如下步骤:
矿石从出料口掉落,自由落地到振动信号采集板上,撞击产生振动信号,采集所述振动信号,对所述振动信号进行解调得到冲击特征参量。
矿石在撞击所述振动信号采集板后掉落到匀速运动的传送带上。
利用激光雷达对矿石进行扫描,获得矿石的距离回波点云数据,对距离回波点云数据进行处理,得到矿石的体积参量。
针对冲击特征参量与体积参量进行联合处理后得到联合特征参量,对联合特征参量利用神经网络模型进行矿石种类的识别。
进一步地,采集振动信号,对振动信号进行解调得到冲击特征参量,具体为:
矿石从出料口掉落,自由落地到振动信号采集板上的过程中的动力学方程为:
其中M为振动信号采集板的结构质量矩阵;C为所述振动信号采集板结构阻尼矩阵;K为所述振动信号采集板的结构刚度矩阵;x(t)为所述振动信号采集板的总体节点位移,且
在碰撞过程中,碰撞初始时刻为t
所述冲击特征参量为矿石和振动信号采集板在碰撞分离时刻的矿石速度增量Δv
Δv
其中v
进一步地,体积特征参量为矿石的距离回波点云数据在三维空间内的体积积分。
进一步地,振动信号采集板为金属板
进一步地,联合特征参量为冲击特征参量与体积特征参量的比值。
进一步地,联合特征参量利用神经网络模型进行矿石种类的识别,具体为:利用卷积神经网络模型对联合特征参量进行识别。
本发明另外一个实施例还提供了一种激光雷达结合振动信号的智能矿石识别装置,包括传送带、振动信号采集模块、激光雷达模块以及综合处理模块;
传送带一端设置出料口,出料口下方设置振动信号采集模块;传送带中部上方设置激光雷达模块;传送带匀速运动。
振动信号采集模块包括振动信号采集板和振动信号传感器,矿石从出料口掉落,自由落地到振动信号采集板上产生振动信号,振动信号采集板上产生的振动信号传感器采集到采集振动信号,将振动信号传输到综合处理模块。
矿石在撞击振动信号采集板后掉落到传送带上,平稳运行经过激光雷达模块,由激光雷达模块扫描得到矿石的距离回波点云数据,距离回波电云传输到综合处理模块。
综合处理模块对振动信号进行解调,得到冲击特征参量。
综合处理模块对矿石的距离回波点云数据进行处理,得到矿石的体积参量。
综合处理模块将冲击特征参量与体积参量进行联合处理后得到联合特征参量,针对联合特征参量利用神经网络模型进行矿石种类的识别。
进一步地,振动信号采集板为金属板。
有益效果:
1、本发明实施例提供的基于激光成像的人工智能矿石识别方法及装置,利用矿石下落的振动信号结合激光雷达对矿石进行识别,可以大幅提高矿石的识别准确率。激光雷达对体积的识别精度能达到毫米级别,本发明实施例中振动信号传感器的精度可达到20mv/g,可以灵敏地通过多模特征参量得到矿石的密度物理属性。本发明能够良好解决由于矿石表面含水量高和灰尘遮盖而影响识别率的问题。对表面受到遮盖的矿石,如煤和矸石的识别率达到97%。工作过程中不依赖环境光,抗振动能力强,具有防爆特性。
2、本发明提供的基于激光成像的人工智能矿石识别方法及装置,环境适应力强,不需光源且无射线辐射危害。
3、本发明提供的基于激光成像的人工智能矿石识别方法及装置,运用卷积神经网络算法,对传送带上的矿石识别具有实时性。
附图说明
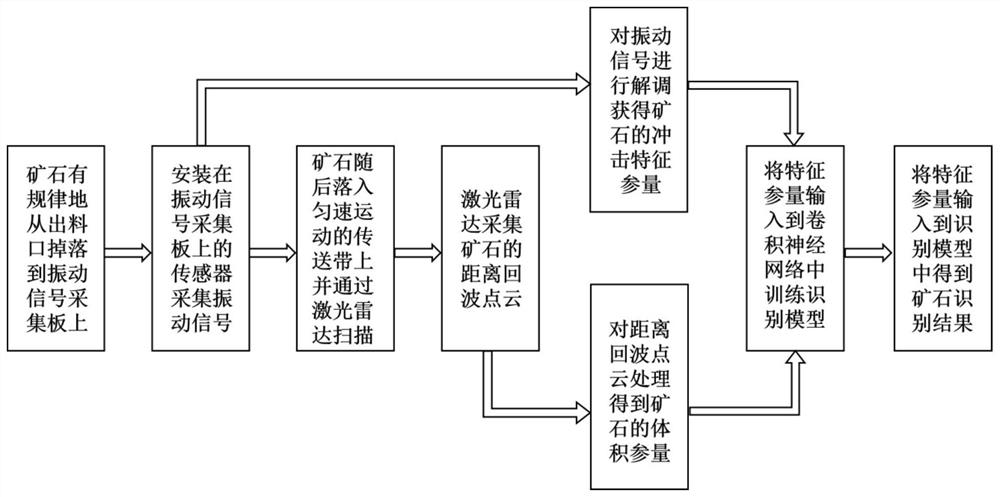
图1为本发明实施例提供的一种激光雷达结合振动信号的智能矿石识别方法流程图;
图2为本发明实施例提供的一种激光雷达结合振动信号的智能矿石识别装置结构图。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本发明提供了一种激光雷达结合振动信号的智能矿石识别方法,如图1所示,该方法包括如下步骤:
S1、矿石从出料口掉落,自由落地到振动信号采集板上。振动信号采集板为金属板,具体地可以采用钢板。
S2、矿石与振动信号采集板碰撞产生振动信号,采集振动信号。矿石撞击振动信号采集板时,可通过振动信号传感器得到时间与冲量的对应信息,通过解调得到冲击特征参量。对振动信号进行解调得到冲击特征参量。
矿石在碰撞过程中的动力学方程具体地可由以下公式表示:
其中M为振动信号采集板的结构质量矩阵;C为所述振动信号采集板结构阻尼矩阵;K为所述振动信号采集板的结构刚度矩阵;x(t)为所述振动信号采集板的总体节点位移,且
在碰撞过程中,碰撞初始时刻为t
所述冲击特征参量为矿石和振动信号采集板在碰撞分离时刻的矿石速度增量Δv
Δv
其中v
S3、矿石随后落入到匀速运动的传送带上,利用激光雷达对矿石6进行扫描。
S4、激光雷达向传送带上的矿石发射激光信号,激光信号会在矿石表面发生反射,激光雷达中有激光返回信号接收单元,接收本身的激光信号发射单元发射的激光返回信号,并进行数据转换,得到矿石的距离回波点云。对距离回波点云数据进行处理,得到矿石的体积参量。体积特征参量为点云在三维空间内的体积积分。
S5、针对冲击特征参量与体积参量进行联合处理后得到联合特征参量,;联合特征向量输入到卷积神经网络中的训练识别模型中。
在本发明中,可以利用卷积神经网络模型对联合处理后的信息进行识别,具体地:
对已有的矿石冲击特征参量和体积参量进行联合处理,构建卷积神经网络模型,利用联合处理后的已有矿石冲击特征参量和体积信息对卷积神经网络模型进行训练和测试,得到训练完毕的卷积神经网络模型。其中,已有的矿石冲击特征参量和体积参量为预先采集到,对应的矿石种类也为已知。
对矿石纹理和外形信息进行联合处理,并将联合后的信息输入至训练完毕的卷积神经网络模型内,训练完毕的卷积神经网络模型可以输出矿石的识别结果。
S6、对联合特征参量利用神经网络模型进行矿石种类的识别,输出矿石识别结果。在本发明中,可以利用卷积神经网络模型对特征参量进行识别,具体地:
本发明的基于激光成像的人工智能矿石识别方法,,利用矿石下落的振动信号结合激光雷达对矿石进行识别,可以大幅提高矿石的识别准确率。激光雷达对体积的识别精度能达到毫米级别,振动信号传感器的精度可达到20mv/g,可以灵敏地通过多模特征参量得到矿石的密度物理属性。本发明能够良好解决由于矿石表面含水量高和灰尘遮盖而影响识别率的问题。工作过程中不依赖环境光,抗振动能力强,具有防爆特性。利用卷积神经网络模型,对矿石冲击特征参量和体积参量的识别更加精准。且操作过程简单,适用性好,能对传送带上的矿石进行实时识别。
如图2所示,本发明另外一个实施例还提供了一种激光雷达结合振动信号的智能矿石识别装置,该装置包括:传送带4、振动信号采集模块3、激光雷达模块2以及综合处理模块5。
传送带4一端设置出料口1,出料口1下方设置振动信号采集模块3;传送带4中部上方设置激光雷达模块2。
振动信号采集模块3包括振动信号采集板和振动信号传感器,矿石6从出料口掉落,自由落地到振动信号采集板上产生振动信号,振动信号采集板上产生的振动信号传感器采集到采集振动信号,将振动信号传输到综合处理模块5。
矿石在撞击振动信号采集板后掉落到传送带4上,平稳运行经过激光雷达模块2,由激光雷达模块2扫描得到矿石的距离回波点云数据,距离回波电云传输到综合处理模块5。
综合处理模块5对振动信号进行解调,得到冲击特征参量。
综合处理模块5对矿石的距离回波点云数据进行处理,得到矿石的体积参量。
综合处理模块5将冲击特征参量与体积参量进行联合处理后得到联合特征参量,针对联合特征参量利用神经网络模型进行矿石种类的识别。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种激光雷达结合振动信号的智能矿石识别方法和装置
- 一种激光雷达和相机融合人工智能矿石识别方法和装置