连杆机构
文献发布时间:2023-06-19 10:57:17
技术领域
本发明与笔记本电脑扩充座有关,特别涉及一种能够增加连接器水平移动行程的连杆机构。
背景技术
当使用者将可携式电子装置(如笔记本电脑)组装于扩充座时,可携式电子装置的底部会先压抵于浮盖,然后浮盖在下压过程中会通过连杆之类的传动机构将连接器推出,使连接器自动插接于可携式电子装置的对应端口,如此即完成两者之间的组装。
然而,连接器的水平移动距离大小取决于浮盖的下压行程多寡,也就是若想要让连接器获得较大的水平移动距离,一般来说势必得增加浮盖的下压行程,如此将会导致浮盖的高度增加,进而影响扩充座的轻薄化效果。
发明内容
本发明的主要目的在于提供一种连杆机构,其能够在不增加下压行程的情况下增加连接器的水平移动距离,以实现轻薄化的效果。
为了达成上述主要目的,本发明的连杆机构包含有一个上盖、一个底杆、一个左连杆、一个右连杆、一个输出杆、一个辅助连杆、以及一个齿轮。该上盖的底面具有一个第一齿部;该底杆位于该上盖下方且能够相对于该上盖水平位移;该左连杆的顶端呈能够水平位移地设于该上盖,该左连杆的底端枢设于该底杆;该右连杆的顶端枢设于该上盖,该右连杆的底端枢设于该底杆;该输出杆位于该底杆上方且呈能够水平位移地设于该上盖,该输出杆的顶面具有一个第二齿部;该辅助连杆的顶端呈能够水平位移地设于该上盖,该辅助连杆的底端枢设于该底杆,此外,该辅助连杆以交叉方式与该左连杆枢设在一起;该齿轮设于该辅助连杆的顶端且与该上盖的第一齿部及该输出杆的第二齿部啮接。
由上述可知,当该上盖受力下压时,该左连杆与该右连杆会同时下降并推动该底杆前进一个行程,接着在该底杆前进的过程中会推动该辅助连杆前进同样一个行程,然后该齿轮在该辅助连杆前进的过程中会一边转动一边跟着该辅助连杆移动,使该输出杆在该齿轮的作动之下前进一个放大行程,如此即可在不增加该上盖的下压行程的情况下增加该输出杆的水平移动距离,使得与该输出杆相配合的一个连接器能获得较大的水平移动距离,以实现结构轻薄化的效果。
优选:该上盖的底面在该第一齿部的两相对侧分别具有一个肋板,两个肋板相互平行且分别具有一个第一滑槽、一个第二滑槽及一个卡槽,该左连杆的顶端呈能够水平位移地设于该第一滑槽,该右连杆的顶端枢设于该卡槽,该输出杆呈能够水平位移地设于该第一滑槽和该第二滑槽,该辅助连杆的顶端呈能够水平位移地设于该第二滑槽。
优选:该辅助连杆的中央具有一个环部,该辅助连杆以该环部枢设于该左连杆,该辅助连杆还具有一个上杆部和一个下杆部,该上杆部的顶端呈能够水平位移地设于该上盖且设有上述齿轮,该上杆部的底端与该环部连接,该下杆部的顶端与该环部连接,该下杆部的底端枢设于该底杆,此外,该上杆部与该下杆部互不平行,使得该上杆部与该下杆部之间具有一个朝向该上盖的钝角,通过该钝角的设计,使得该辅助连杆能够被该底杆顺利推动而产生水平位移。
有关本发明所提供的对于连杆机构的详细构造、特点、组装或使用方式,将于后续的实施方式详细说明中予以描述。然而,在本发明领域中具有通常知识者应能了解,这些详细说明以及实施本发明所列举的特定实施例,仅用于说明本发明,并非用以限制本发明的权利要求范围。
附图说明
图1为本发明的连杆机构的俯视立体图。
图2为本发明的连杆机构的仰视立体图。
图3为本发明的连杆机构的立体分解图。
图4为本发明的连杆机构的局部剖视图,主要显示上盖下压前的状态。
图5为本发明的连杆机构的另一局部剖视图,主要显示上盖下压后的状态。
图6A至图6B为本发明的连杆机构的局部剖视图,主要显示输出杆前进一个放大行程。
(符号说明)
10…连杆机构 20…上盖
21…肋板 22…第一滑槽
23…第二滑槽 24…卡槽
25…第一齿部 30…底杆
31…第一枢轴 32…第二枢轴
33…第三滑槽 40…左连杆
41…第一滑轴 42…第二滑轴
43…第三枢轴 44…螺栓
45…螺帽 50…右连杆
51…第四枢轴 52…第一枢槽
60…输出杆 61…第三滑轴
62…螺栓 63…螺帽
64…第四滑轴 65…螺栓
66…螺帽 67…第二齿部
70…辅助连杆 71…环部
72…上杆部 73…第五滑轴
74…下杆部 75…第二枢槽
θ…钝角 80…齿轮
81…螺栓 82…螺帽
ΔX…行程 ΔY…放大行程
具体实施方式
以下通过所列举的实施例结合附图,详细说明本发明的技术内容及特征,但所公开的内容并非用以限制本发明的保护范围。本领域技术人员可由本说明书所公开的内容了解本发明的优点与效果。本发明可通过其他不同的具体实施例加以施行或应用,本说明书中的各项细节也可基于不同观点和应用,在不背离本发明的构思下进行各种修改和变更。申请人首先在此说明,本发明的附图仅为简单示意说明,并非依实际尺寸的描绘,并且,于整篇说明书中,包括以下介绍的实施例以及权利要求中,有关方向性的名词皆以附图中的方向为基准,但本说明书内容所提及的“上”、“下”、“内”、“外”、“顶”、“底”、“左”、“右”、“前”、“后”等方向性形容用语,只是以正常使用方向为基准的例示描述用语,并非作为限制主张范围的用意。其次,在以下将要介绍的实施例以及附图中,相同的元件标号代表相同或近似的元件或其结构特征。另外,应当可以理解的是,虽然本文中可能会使用到“第一”、“第二”、“第三”、“第四”、“第五”等术语来描述各种元件,但这些元件不应受这些术语的限制。这些术语主要是用于区分一元件与另一元件。
请参阅图1至图3,本发明的连杆机构10包含有一个上盖20、一个底杆30、一个左连杆40、一个右连杆50、一个输出杆60、一个辅助连杆70、以及一个齿轮80。
上盖20的顶面用来承接可携式电子装置(如笔记本电脑,图中未示)。如图2及图3所示,上盖20的底面具有两个相互平行的肋板21和一个位于两个肋板21之间的第一齿部25,其中,各个肋板21由左往右依次具有一个第一滑槽22、一个第二滑槽23及一个卡槽24。
底杆30设于上盖20下方且能够相对于上盖20水平位移。底杆30的左端具有一个第一枢轴31,底杆30的右端具有一个第二枢轴32,底杆30的中央具有一个第三滑槽33。
左连杆40的顶端具有一个第一滑轴41,第一滑轴41穿设于上盖20的两个肋板21的第一滑槽22内且利用一根螺栓44与一个螺帽45的组合来防止脱离,使左连杆40的顶端可相对于上盖20水平位移。左连杆40的底端具有一个第二滑轴42,第二滑轴42穿设于底杆30的第三滑槽33内,使左连杆40能够相对于底杆30枢转且在第二滑轴42抵靠于第三滑槽33的右端时能够推动底杆30往右水平位移。此外,左连杆40的中央具有一个第三枢轴43。
右连杆50的顶端具有一个第四枢轴51,第四枢轴51以能够枢转的方式卡接于上盖20的两个肋板21的卡槽24内,右连杆50的底端具有一个第一枢槽52,第一枢槽52以能够枢转的方式卡接于底杆30的第二枢轴32,使得右连杆50被上盖20下压时能够相对于底杆30枢转且推动底杆30往右水平位移。
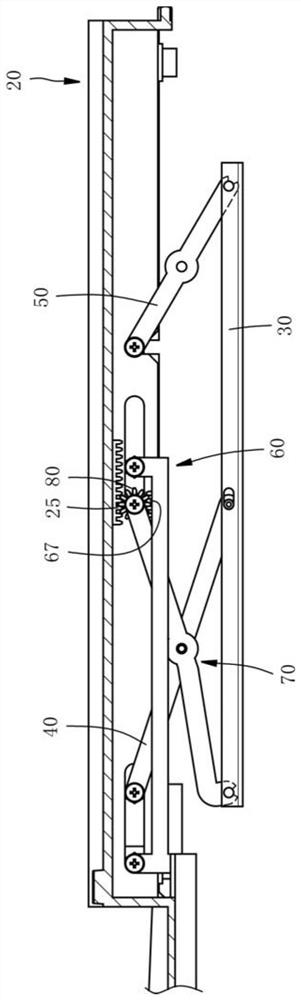
输出杆60具有一个第三滑轴61,第三滑轴61穿设于上盖20的两个肋板21的第一滑槽22内且利用一根螺栓62与一个螺帽63的组合来防止脱离,输出杆60的右端具有一个第四滑轴64,第四滑轴64穿设于上盖20的两个肋板21的第二滑槽23内且利用一根螺栓65与一个螺帽66的组合来防止脱离,使输出杆60能够相对于上盖20水平位移。此外,如图3至图5所示,输出杆60的顶面在靠近第四滑轴64的地方具有一个第二齿部67,第二齿部67与上盖20的第一齿部25上下相对。
辅助连杆70具有一个环部71、与环部71连接的一个上杆部72以及与环部71连接的一个下杆部74,环部71枢设于左连杆40的第三枢轴43,上杆部72的顶端具有一个第五滑轴73,第五滑轴73穿设于上盖20的两个肋板21的第二滑槽23内,下杆部74的底端具有一个第二枢槽75,第二枢槽75以能够枢转的方式卡接于底杆30的第一枢轴31,使辅助连杆70以交叉方式与左连杆40枢设在一起且能够被底杆30所推动而水平位移。此外,上杆部72与下杆部74互不平行,使得上杆部72与下杆部74之间具有一个朝向上盖20的钝角θ,通过该钝角θ的设计,使得辅助连杆70能够被底杆30推动而产生水平位移,进而驱动齿轮80旋转。
齿轮80利用一根螺栓81与一个螺帽82的搭配而安装于辅助连杆70的第五滑轴73,并且同时与上盖20的第一齿部25及输出杆60的第二齿部67(如图4所示)啮接,使得齿轮80在受到辅助连杆70的带动时可以通过与输出杆60之间的啮接关系来推动输出杆60。
由上述可知,当上盖20受力下压时,如图4及图5所示,左连杆40与右连杆50会同时下降并推动底杆30向右前进一个行程ΔX(如图6A及图6B所示),接着在底杆30向右前进的过程中会推动辅助连杆70的顶端向右前进同样一个行程ΔX,然后齿轮80会一边跟着辅助连杆70前进,一边通过与输出杆60的第二齿部67之间的啮接关系进行转动,使输出杆60在齿轮80的推动之下向右前进一个放大行程ΔY(如图6A及图6B所示),如此即可在不增加上盖20的下压行程的情况下增加输出杆60的水平移动距离,使得与输出杆60相配合的连接器(图中未示)能够获得较大的水平移动距离,以实现结构轻薄化的效果。
另一方面,通过本发明所提供的连杆机构,使上盖20在下压过程中皆保持水平,进而确保上盖20所承接的可携式电子装置(如笔记本电脑,图中未示)不会有倾斜的情况发生,直到与连接器完成连接为止。
- 一种四连杆机构及其具有四连杆机构的巡检机器人
- 用于起落架舱门的连杆机构和包含该连杆机构的打开、关闭和锁定舱门的装置