一种基于气动的仿人型机器人
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及机器人技术领域,特别是一种具有结构紧凑,柔顺性好、气动肌肉状态多样的基于气动的仿人型机器人。
背景技术
软体机器人是一种新型柔软机器人,能够适应各种非结构化环境,可以实现灵活的弯曲、扭转,即使受到外界冲击,也不会产生较大的碰撞好冲击,因此近年来一直是机器人领域研究的热点。
目前,大多数软体机器人的设计是模仿自然界各种生物,气动肌肉由于具有和人的肌肉类似的特性,具有等压、等张、等长特性;人体肌肉在运动过程中吸收身体的氧气,排出二氧化碳,气动肌肉通过控制气动阀充放气实现动作,因此气动肌肉可以较好的运用在软体机器人设计。
CN110936367B,申请号:201911082363.3,申请日:2019-11-07,公开了一种气动仿人机器人系统以气缸驱动仿人机器人的髋关节、膝关节、脚关节、腰关节、肩关节、肘关节、腕关节的运动,具有完全模拟人的关节运动的功能。由直线气缸、摆动气缸、带轮、丝杠、锥齿轮、齿形带、齿形轮以及连接件组成。髋关节和肩关节由摆动气缸通过带轮驱动,膝关节由丝杠和气缸组合驱动,脚关节由多根气缸驱动,肘关节由摆动气缸驱动,腕关节由两组变距离摆动部件和气缸并联机构组成;髋关节、膝关节、脚关节、腰关节、肩关节、肘关节、腕关节分别具有2、1、4、6、2、1、4个自由度,全身共计34个自由度。CN110682305B,申请号:201910995867.8,申请日:2019-10-18,公开了一种仿人型机器人系统,腰关节装置的两侧分别设置上肢装置,下端两侧分别设置下肢装置,以气缸、气动肌肉和弹簧组合体驱动仿人机器人的上肢装置、腰关节装置、下肢装置的运动,具有完全模拟人的关节运动的功能。由气缸、带轮、连接件、气动肌肉和弹簧组合体、连接板、气爪等组成。摆动气缸之间结合,摆动气缸与带传动结合,气爪驱动上肢系统,气动肌肉和弹簧组合体和直线气缸驱动腰关节系统,直线气缸、直线气缸与杆结构结合驱动下肢系统。单上肢系统、腰关节系统、单下肢系统分别具有5、7、12个自由度,整个机器人共计41个自由度。CN110561457B,申请号:201910890458.1,申请日:2019-09-20,公开了基于气缸的仿人机器人系统,上肢关节装置的腰部第一连接件的两端分别可转动连接肱骨支架,肱骨支架依次连接大臂连接件,万向节和小臂连接件;腰关节装置的腰部第一摆动气缸两端设置在腰部第一连接件上,腰部第一摆动气缸固定在腰部第二连接件上,腰部第二连接件固定在腰部第二摆动气缸的转动轴上,腰部第二摆动气缸的缸体固定在腰部第三连接件上,腰部第三连接件的两侧分别可转动连接至少四个腰部气缸。
CN110936367B,CN110682305B,CN110561457B分别设计出刚性仿人机器人关节。
CN108466256B,申请号:201810344584.2,申请日:2018-04-17,公开了一种基于气动肌肉与气缸的仿人型机器人系统,以气动肌肉和气缸驱动仿人型机器人的肩关节、肘关节、腰关节、髋关节、膝关节、踝关节的运动,该机器人主要由头骨、椎骨、肋骨、肱骨、桡骨、固定件、股骨、腓骨、气动肌肉、气缸以及脚组成。肩关节、肘关节、腰关节、髋关节、膝关节、踝关节分别具有3、3、4、3、3、4个自由度,整个系统具有34个自由度,其中肩关节由9根来自椎骨的气动肌肉以柔性冗余的形式分布和驱动肩关节,小腿关节则由周边均匀分布三根气缸,中间一根气缸支撑的并联机构构成,实现转动和移动的自由切换。仅仅设计单独柔性并联关节和单独刚性并联串联的仿人机器人关节,并且仅仅为执行元件并联的形式驱动关节,并不能较为真实的反应人体关节肌肉的运动特性。
需要一种具有结构紧凑,柔顺性好、气动肌肉状态多样的基于气动的仿人型机器人。
发明内容
本发明的目的是提供一种具有结构紧凑,柔顺性好、气动肌肉状态多样的基于气动的仿人型机器人。
一种基于气动的仿人型机器人,包括:
腰关节,所述腰关节的两侧分别设置互为镜像的上肢关节,下部两侧分别设置互为镜像的下肢关节,所述腰关节的胸部连接件上方依次可转动连接脖子椎骨三、脖子椎骨二、脖子椎骨一、头;
所述胸部连接件下方两侧分别固定连接连接板一和连接板四,所述连接板一分别可转动连接气动肌肉一、中间支杆一、气动肌肉二、气动肌肉三,所述气动肌肉一、气动肌肉二、气动肌肉三分别可转动连接连接板二,所述中间支杆一固定连接连接板二,所述连接板四分别可转动连接气动肌肉七、中间支杆三、气动肌肉八、气动肌肉九,所述气动肌肉七、气动肌肉八、气动肌肉九分别可转动连接连接板五,所述中间支杆三固定连接连接板五,所述连接板二分别可转动连接中间支杆二、气动肌肉四、气动肌肉五、气动肌肉六,所述气动肌肉四、气动肌肉五、气动肌肉六分别可转动连接连接板三,所述中间支杆二固定连接连接板三,所述连接板五分别可转动连接气动肌肉十、气动肌肉十一、中间支杆四、气动肌肉十二,所述气动肌肉十、气动肌肉十一、气动肌肉十二分别可转动连接连接板六,所述中间支杆四固定连接连接板六,所述连接板三和连接板六分别固定连接腰关节上侧板,所述腰关节上侧板分别通过腰关节气动马达一和腰关节气动马达二可转动连接腰关节下侧板,所述腰关节下侧板的两侧分别固定腰关节气动马达三的壳体,所述腰关节气动马达三的转子固定腰关节带轮一,所述腰关节带轮一通过皮带连接腰关节带轮二,所述腰关节带轮二通过髋关节连接件连接下肢关节的大腿连接件一;
所述大腿连接件一分别固定连接膝关节气动肌肉一、膝关节气动肌肉二、大腿连接件二、膝关节气动肌肉五、膝关节气动肌肉六,所述膝关节气动肌肉一、膝关节气动肌肉二成组,通过绳索啮合膝关节带轮一,所述膝关节气动肌肉五、膝关节气动肌肉六成组,通过绳索啮合膝关节带轮三,所述大腿连接件二固定连接膝关节连接件一,所述膝关节连接件一分别同膝关节带轮一、膝关节带轮二可转动连接,所述膝关节连接件一分别同膝关节带轮三、膝关节带轮四可转动连接,所述膝关节带轮一、膝关节带轮三分别同膝关节连接件二可转动连接,所述膝关节连接件二固定连接小腿连接件一,所述小腿连接件一固定连接小腿连接件二,所述小腿连接件二固定连接小腿连接件三,所述小腿连接件三固定连接小腿连接件四,所述小腿连接件四可转动连接脚,所述小腿连接件三分别固定连接膝关节气动肌肉三、膝关节气动肌肉四、膝关节气动肌肉七、膝关节气动肌肉八,所述膝关节气动肌肉三、膝关节气动肌肉四成组,通过绳索啮合膝关节带轮二,所述膝关节气动肌肉七、膝关节气动肌肉八成组,通过绳索啮合膝关节带轮四,所述小腿连接件一分别固定连接小腿气动肌肉一、小腿气动肌肉二、小腿气动肌肉三、小腿气动肌肉四,所述小腿气动肌肉一、小腿气动肌肉二、小腿气动肌肉三、小腿气动肌肉四分别可转动连接脚;
所述上肢关节的大臂气动肌肉七、大臂气动肌肉八、大臂气动肌肉九分别可转动连接大臂气动肌肉连接板,所述大臂气动肌肉七可转动连接脖子椎骨一,所述大臂气动肌肉八可转动连接脖子椎骨二,所述大臂气动肌肉九可转动连接脖子椎骨三,所述上肢关节的大臂气动肌肉一、大臂气动肌肉二、大臂气动肌肉三、大臂气动肌肉四、大臂气动肌肉五、大臂气动肌肉六的两端分别可转动连接胸部连接件、大臂气动肌肉连接板,所述上肢关节的肩关节气动马达壳体固定在胸部连接件上,所述肩关节气动马达转子固定连接大臂中间杆一,所述大臂中间杆一固定连接大臂气动肌肉连接板;
所述大臂气动肌肉连接板分别固定连接肘关节气动肌肉一、肘关节气动肌肉二、肘关节气动肌肉五、大臂中间杆二、肘关节气动肌肉六,所述大臂中间杆二固定连接肘关节连接件一,所述肘关节连接件一可转动连接肘关节带轮一、肘关节带轮二、肘关节带轮三、肘关节带轮四,所述肘关节带轮一、肘关节带轮二固定连接,所述肘关节带轮三、肘关节带轮四固定连接,所述肘关节带轮一、肘关节带轮三分别可转动连接肘关节连接件二,所述肘关节连接件二依次固定连接小臂连接件一、小臂连接件二、小臂连接件三,所述小臂连接件三分别固定连接肘关节气动肌肉三、肘关节气动肌肉四、肘关节气动肌肉七、肘关节气动肌肉八,所述肘关节气动肌肉一、肘关节气动肌肉二成组,通过绳索啮合肘关节带轮一,所述肘关节气动肌肉五、肘关节气动肌肉六成组,通过绳索啮合肘关节带轮三,所述肘关节气动肌肉三、肘关节气动肌肉四成组,通过绳索啮合肘关节带轮二,所述肘关节气动肌肉七、肘关节气动肌肉八成组,通过绳索啮合肘关节带轮四,所述小臂连接件一分别固定连接小臂气动肌肉一、小臂气动肌肉二、小臂气动肌肉三、小臂气动肌肉四,所述小臂连接件三固定连接小臂连接件四,所述小臂气动肌肉一、小臂气动肌肉二、小臂气动肌肉三、小臂气动肌肉四、小臂连接件四分别可转动连接腕关节连接板,所述腕关节连接板固定连接气爪;
计算机,所述计算机分别连接上肢关节控制系统、腰关节控制系统、下肢关节控制系统。
所述胸部连接件为中空的梯形。
所述连接板一、连接板二、连接板三、连接板四、连接板五、连接板六分别为圆盘。
所述气动肌肉一、气动肌肉二、气动肌肉三均匀分布在中间支杆一四周,所述气动肌肉四、气动肌肉五、气动肌肉六均匀分布在中间支杆二四周,所述气动肌肉七、气动肌肉八、气动肌肉九均匀分布在中间支杆三四周,所述气动肌肉十、气动肌肉十一、气动肌肉十二均匀分布在中间支杆四四周。
所述大腿连接件一为中空的长方体,所述膝关节连接件一和膝关节连接件二分别为U形,所述小腿连接件三为H形。
所述脖子椎骨一、脖子椎骨二、脖子椎骨三分别为长方体。
所述大臂气动肌肉连接板为圆盘。
所述肘关节连接件一、肘关节连接件二分别为U形。
所述小臂连接件三为H形。
所述计算机为控制器,所述上肢关节控制系统分别控制大臂气动肌肉一、大臂气动肌肉二、大臂气动肌肉三、大臂气动肌肉四、大臂气动肌肉五、大臂气动肌肉六、大臂气动肌肉七、大臂气动肌肉八、大臂气动肌肉九、肘关节气动肌肉一、肘关节气动肌肉二、肘关节气动肌肉三、肘关节气动肌肉四、肘关节气动肌肉五、肘关节气动肌肉六、肘关节气动肌肉七、肘关节气动肌肉八、小臂气动肌肉一、小臂气动肌肉二、小臂气动肌肉三、小臂气动肌肉四、气爪;
所述腰关节控制系统分别控制气动肌肉一、气动肌肉二、气动肌肉三、气动肌肉七、气动肌肉八、气动肌肉九、气动肌肉四、气动肌肉五、气动肌肉六、腰关节下侧板、腰关节气动马达三;
所述下肢关节控制系统分别控制膝关节气动肌肉一、膝关节气动肌肉二、膝关节气动肌肉五、膝关节气动肌肉六、膝关节气动肌肉三、膝关节气动肌肉四、膝关节气动肌肉七、膝关节气动肌肉八、小腿气动肌肉一、小腿气动肌肉二、小腿气动肌肉三、小腿气动肌肉四。
本发明公开了一种基于气动的仿人型机器人,以气动肌肉模拟人的肌肉驱动膝关节、踝关节、腰关节、脖子关节、肩关节、肘关节、腕关节的运动,具有完全模拟人的关节运动的功能。所述的一种基于气动的仿人型机器人主要由气爪、带轮、椎骨、气动肌肉、连接件以及关节控制系统组成。腰关节组成包括两层串联的气动肌肉并联平台并联而成,肩关节则由气动马达与万向节组成具有主动元件的球铰,与气动肌肉组合驱动关节。肘关节、膝关节则由一组8根气动肌肉组成的柔性冗余并联驱动,腕关节、踝关节由并联气动肌肉驱动、髋关节由气动马达带动带轮驱动。本发明专利以气动肌肉驱动,具有结构紧凑,柔顺性好、气动肌肉状态多样的特点,可用于教学和演示。
本发明的有益效果是:
1.本发明膝关节、肘关节利用多组拮抗肌从不同角度同时驱动一个关节,肩关节采用多根气动肌肉组成柔性冗余混联关节,可以同时实现关节多个方向的运动;
2.本发明利用气动肌肉驱动具有较大的功率/质量比、较好的柔顺性、结构紧凑等优点;
3.本发明利用气动马达与万向节组成具有主动元件的球铰,与气动肌肉组合驱动关节;
4.本发明髋关节、膝关节、踝关节、腰关节、脖子关节、肩关节、肘关节、腕关节分别具有1、1、2、1、2、3、1、5个自由度,可以形象地模拟人各关节实现的各种动作,有助于了解人体结构和人体每根肌肉在关节运动中的作用。
附图说明
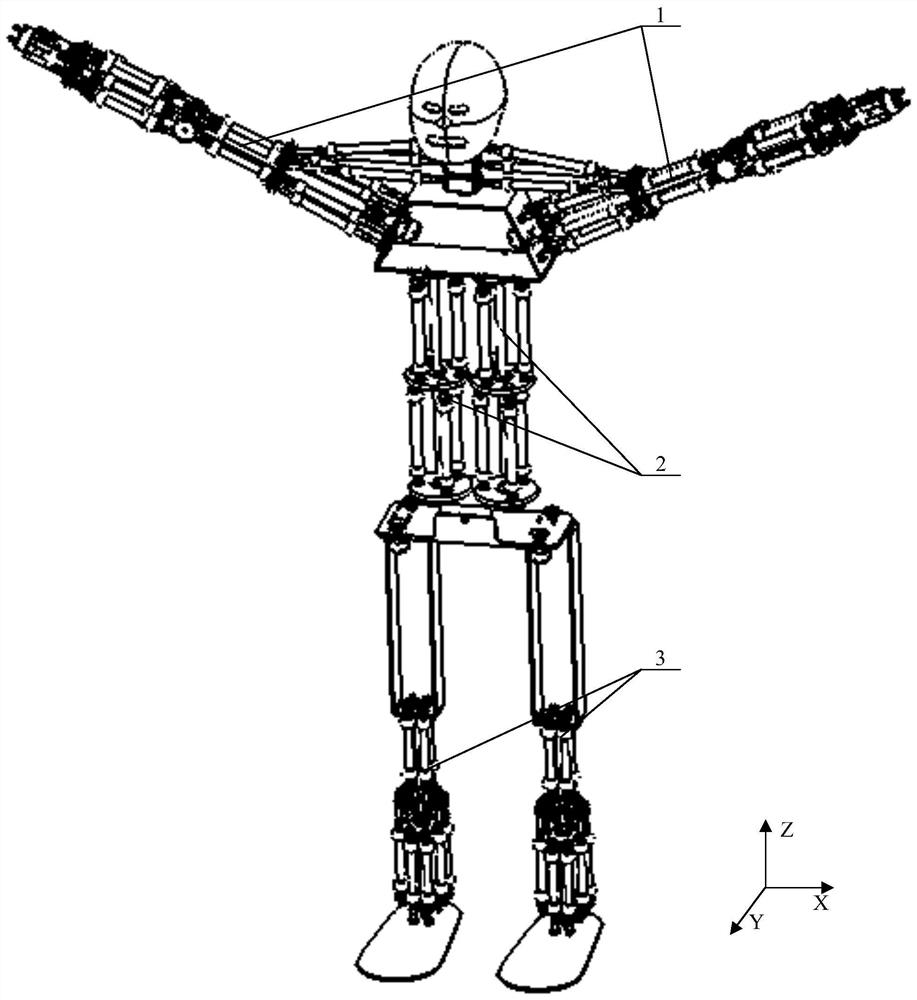
图1是基于气动的仿人型机器人整体机械结构图;
图2是基于气动的仿人型机器人腰关节并联机构机械结构图;
图3是基于气动的仿人型机器人绕Y轴摆动机械结构图;
图4是基于气动的仿人型机器人双下肢机械结构图;
图5是基于气动的仿人型机器人髋关节机械结构图;
图6是基于气动的仿人型机器人膝关节机械结构图;
图7是基于气动的仿人型机器人踝关节机械结构图;
图8是基于气动的仿人型机器人单上肢机械结构图;
图9是基于气动的仿人型机器人肘关节和腕关节整体机械结构图;
图10是基于气动的仿人型机器人肘关节机械结构图;
图11是基于气动的仿人型机器人腕关节机械结构图;
图12是基于气动的仿人型机器人控制系统方框示意图;
图中:上肢关节1、腰关节2、下肢关节3、连接板一4、气动肌肉一5、中间支杆一6、气动肌肉二7、气动肌肉三8、连接板二9、中间支杆二10、气动肌肉四11、气动肌肉五12、气动肌肉六13、连接板三14、腰关节上侧板15、胸部连接件16、连接板四17、气动肌肉七18、中间支杆三19、气动肌肉八20、气动肌肉九21、连接板五22、气动肌肉十23、气动肌肉十一24、中间支杆四25、气动肌肉十二26、连接板六27、腰关节气动马达一28、腰关节气动马达二29、腰关节下侧板30、腰关节带轮一31、腰关节气动马达三32、皮带33、腰关节带轮二34、髋关节连接件35、大腿连接件一36、膝关节气动肌肉一37、膝关节气动肌肉二38、大腿连接件二39、膝关节带轮一40、膝关节带轮二41、膝关节气动肌肉三42、膝关节气动肌肉四43、膝关节气动肌肉五44、膝关节气动肌肉六45、膝关节连接件一46、膝关节带轮三47、膝关节带轮四48、膝关节连接件二49、小腿连接件一50、小腿连接件二51、膝关节气动肌肉七52、膝关节气动肌肉八53、小腿连接件三54、小腿气动肌肉一55、小腿气动肌肉二56、小腿连接件四57、脚58、小腿气动肌肉三59、小腿气动肌肉四60、头61、脖子椎骨一62、脖子椎骨二63、脖子椎骨三64、肩关节气动马达65、大臂气动肌肉连接板66、大臂中间杆一67、大臂气动肌肉一68、大臂气动肌肉二69、大臂气动肌肉三70、大臂气动肌肉四71、大臂气动肌肉五72、大臂气动肌肉六73、大臂气动肌肉七74、大臂气动肌肉八75、大臂气动肌肉九76、肘关节气动肌肉一77、肘关节气动肌肉二78、肘关节连接件一79、肘关节带轮一80、肘关节带轮二81、肘关节带轮三80-2、肘关节带轮四81-2、肘关节连接件二82、肘关节气动肌肉三83、肘关节气动肌肉四83-2、肘关节气动肌肉五84、大臂中间杆二85、肘关节气动肌肉六86、小臂连接件一87、小臂连接件二88、肘关节气动肌肉七89、肘关节气动肌肉八90、小臂气动肌肉一91、小臂气动肌肉二92、腕关节连接板93、气爪94、小臂气动肌肉三95、小臂气动肌肉四96、小臂连接件三97、小臂连接件四98、计算机99、上肢关节控制系统100、腰关节控制系统101、下肢关节控制系统102。
具体实施方式
以下结合附图和具体实施例,对本发明做进一步说明。
一种基于气动的仿人型机器人,包括:
腰关节2,腰关节2的两侧分别设置互为镜像的上肢关节1,下部两侧分别设置互为镜像的下肢关节3,腰关节2的胸部连接件16上方依次可转动连接脖子椎骨三64、脖子椎骨二63、脖子椎骨一62、头61;
胸部连接件16下方两侧分别固定连接连接板一4和连接板四17,连接板一4分别可转动连接气动肌肉一5、中间支杆一6、气动肌肉二7、气动肌肉三8,气动肌肉一5、气动肌肉二7、气动肌肉三8分别可转动连接连接板二9,中间支杆一6固定连接连接板二9,连接板四17分别可转动连接气动肌肉七18、中间支杆三19、气动肌肉八20、气动肌肉九21,气动肌肉七18、气动肌肉八20、气动肌肉九21分别可转动连接连接板五22,中间支杆三19固定连接连接板五22,连接板二9分别可转动连接中间支杆二10、气动肌肉四11、气动肌肉五12、气动肌肉六13,气动肌肉四11、气动肌肉五12、气动肌肉六13分别可转动连接连接板三14,中间支杆二10固定连接连接板三14,连接板五22分别可转动连接气动肌肉十23、气动肌肉十一24、中间支杆四25、气动肌肉十二26,气动肌肉十23、气动肌肉十一24、气动肌肉十二26分别可转动连接连接板六27,中间支杆四25固定连接连接板六27,连接板三14和连接板六27分别固定连接腰关节上侧板15,腰关节上侧板15分别通过腰关节气动马达一28和腰关节气动马达二29可转动连接腰关节下侧板30,腰关节下侧板30的两侧分别固定腰关节气动马达三32的壳体,腰关节气动马达三32的转子固定腰关节带轮一31,腰关节带轮一31通过皮带33连接腰关节带轮二34,腰关节带轮二34通过髋关节连接件35连接下肢关节3的大腿连接件一36;
大腿连接件一36分别固定连接膝关节气动肌肉一37、膝关节气动肌肉二38、大腿连接件二39、膝关节气动肌肉五44、膝关节气动肌肉六45,膝关节气动肌肉一37、膝关节气动肌肉二38成组,通过绳索啮合膝关节带轮一40,膝关节气动肌肉五44、膝关节气动肌肉六45成组,通过绳索啮合膝关节带轮三47,大腿连接件二39固定连接膝关节连接件一46,膝关节连接件一46分别同膝关节带轮一40、膝关节带轮二41可转动连接,膝关节连接件一46分别同膝关节带轮三47、膝关节带轮四48可转动连接,膝关节带轮一40、膝关节带轮三47分别同膝关节连接件二49可转动连接,膝关节连接件二49固定连接小腿连接件一50,小腿连接件一50固定连接小腿连接件二51,小腿连接件二51固定连接小腿连接件三54,小腿连接件三54固定连接小腿连接件四57,小腿连接件四57可转动连接脚58,小腿连接件三54分别固定连接膝关节气动肌肉三42、膝关节气动肌肉四43、膝关节气动肌肉七52、膝关节气动肌肉八53,膝关节气动肌肉三42、膝关节气动肌肉四43成组,通过绳索啮合膝关节带轮二41,膝关节气动肌肉七52、膝关节气动肌肉八53成组,通过绳索啮合膝关节带轮四48,小腿连接件一50分别固定连接小腿气动肌肉一55、小腿气动肌肉二56、小腿气动肌肉三59、小腿气动肌肉四60,小腿气动肌肉一55、小腿气动肌肉二56、小腿气动肌肉三59、小腿气动肌肉四60分别可转动连接脚58;
上肢关节1的大臂气动肌肉七74、大臂气动肌肉八75、大臂气动肌肉九76分别可转动连接大臂气动肌肉连接板66,大臂气动肌肉七74可转动连接脖子椎骨一62,大臂气动肌肉八75可转动连接脖子椎骨二63,大臂气动肌肉九76可转动连接脖子椎骨三64,上肢关节1的大臂气动肌肉一68、大臂气动肌肉二69、大臂气动肌肉三70、大臂气动肌肉四71、大臂气动肌肉五72、大臂气动肌肉六73的两端分别可转动连接胸部连接件16、大臂气动肌肉连接板66,上肢关节1的肩关节气动马达65壳体固定在胸部连接件16上,肩关节气动马达65转子固定连接大臂中间杆一67,大臂中间杆一67固定连接大臂气动肌肉连接板66;
大臂气动肌肉连接板66分别固定连接肘关节气动肌肉一77、肘关节气动肌肉二78、肘关节气动肌肉五84、大臂中间杆二85、肘关节气动肌肉六86,大臂中间杆二85固定连接肘关节连接件一79,肘关节连接件一79可转动连接肘关节带轮一80、肘关节带轮二81、肘关节带轮三80-2、肘关节带轮四81-2,肘关节带轮一80、肘关节带轮二81固定连接,肘关节带轮三80-2、肘关节带轮四81-2固定连接,肘关节带轮一80、肘关节带轮三80-2分别可转动连接肘关节连接件二82,肘关节连接件二82依次固定连接小臂连接件一87、小臂连接件二88、小臂连接件三97,小臂连接件三97分别固定连接肘关节气动肌肉三83、肘关节气动肌肉四83-2、肘关节气动肌肉七89、肘关节气动肌肉八90,肘关节气动肌肉一77、肘关节气动肌肉二78成组,通过绳索啮合肘关节带轮一80,肘关节气动肌肉五84、肘关节气动肌肉六86成组,通过绳索啮合肘关节带轮三80-2,肘关节气动肌肉三83、肘关节气动肌肉四83-2成组,通过绳索啮合肘关节带轮二81,肘关节气动肌肉七89、肘关节气动肌肉八90成组,通过绳索啮合肘关节带轮四81-2,小臂连接件一87分别固定连接小臂气动肌肉一91、小臂气动肌肉二92、小臂气动肌肉三95、小臂气动肌肉四96,小臂连接件三97固定连接小臂连接件四98,小臂气动肌肉一91、小臂气动肌肉二92、小臂气动肌肉三95、小臂气动肌肉四96、小臂连接件四98分别可转动连接腕关节连接板93,腕关节连接板93固定连接气爪94;计算机99,计算机99分别连接上肢关节控制系统100、腰关节控制系统101、下肢关节控制系统102。
胸部连接件16为中空的梯形。连接板一4、连接板二9、连接板三14、连接板四17、连接板五22、连接板六27分别为圆盘。气动肌肉一5、气动肌肉二7、气动肌肉三8均匀分布在中间支杆一6四周,气动肌肉四11、气动肌肉五12、气动肌肉六13均匀分布在中间支杆二10四周,气动肌肉七18、气动肌肉八20、气动肌肉九21均匀分布在中间支杆三19四周,气动肌肉十23、气动肌肉十一24、气动肌肉十二26均匀分布在中间支杆四25四周。大腿连接件一36为中空的长方体,膝关节连接件一46和膝关节连接件二49分别为U形,小腿连接件三54为H形。
脖子椎骨一62、脖子椎骨二63、脖子椎骨三64分别为长方体。大臂气动肌肉连接板66为圆盘。肘关节连接件一79、肘关节连接件二82分别为U形。小臂连接件三97为H形。
计算机99为控制器,上肢关节控制系统100分别控制大臂气动肌肉一68、大臂气动肌肉二69、大臂气动肌肉三70、大臂气动肌肉四71、大臂气动肌肉五72、大臂气动肌肉六73、大臂气动肌肉七74、大臂气动肌肉八75、大臂气动肌肉九76、肘关节气动肌肉一77、肘关节气动肌肉二78、肘关节气动肌肉三83、肘关节气动肌肉四83-2、肘关节气动肌肉五84、肘关节气动肌肉六86、肘关节气动肌肉七89、肘关节气动肌肉八90、小臂气动肌肉一91、小臂气动肌肉二92、小臂气动肌肉三95、小臂气动肌肉四96、气爪94;腰关节控制系统101分别控制气动肌肉一5、气动肌肉二7、气动肌肉三8、气动肌肉七18、气动肌肉八20、气动肌肉九21、气动肌肉四11、气动肌肉五12、气动肌肉六13、腰关节下侧板30、腰关节气动马达三32;下肢关节控制系统102分别控制膝关节气动肌肉一37、膝关节气动肌肉二38、膝关节气动肌肉五44、膝关节气动肌肉六45、膝关节气动肌肉三42、膝关节气动肌肉四43、膝关节气动肌肉七52、膝关节气动肌肉八53、小腿气动肌肉一55、小腿气动肌肉二56、小腿气动肌肉三59、小腿气动肌肉四60。
一种基于气动的仿人型机器人主要包括上肢关节1、腰关节2、下肢关节3,并且上肢关节1、下肢关节3的数量分别为2,两个上肢关节1的结构完全一样,两个下肢关节3的结构完全一样。
气动肌肉一5、气动肌肉二7、气动肌肉三8两端分别与连接板一4、连接板二9可转动连接;中间支杆一6一端与连接板一4可转动连接,另一端与连接板二9固定连接。气动肌肉一5、气动肌肉二7、气动肌肉三8驱动中间支杆一6、连接板一4之间相对绕X轴、Y轴转动。连接板四17、气动肌肉七18、中间支杆三19、气动肌肉八20、气动肌肉九21与连接板一4、气动肌肉一5、中间支杆一6、气动肌肉二7、气动肌肉三8、连接板二9连接方式相似,气动肌肉七18、气动肌肉八20、气动肌肉九21驱动连接板四17、中间支杆三19之间相对绕X轴、Y轴转动。气动肌肉四11、气动肌肉五12、气动肌肉六13两端分别与连接板二9、连接板三14可转动连接;中间支杆二10一端与连接板二9可转动连接,另一端与连接板三14固定连接。气动肌肉四11、气动肌肉五12、气动肌肉六13驱动连接板二9、中间支杆二10之间相对绕X轴、Y轴转动。连接板五22、气动肌肉十23、气动肌肉十一24、中间支杆四25、气动肌肉十二26、连接板六27与连接板二9、中间支杆二10、气动肌肉四11、气动肌肉五12、气动肌肉六13、连接板三14连接方式相似,气动肌肉十23、气动肌肉十一24、气动肌肉十二26驱动连接板五22、中间支杆四25之间相对绕X轴、Y轴转动。在连接板二9圆周上气动肌肉一5、气动肌肉二7、气动肌肉三8均匀分布,在连接板二9圆周上气动肌肉四11、气动肌肉五12、气动肌肉六13亦均匀分布;气动肌肉一5、气动肌肉二7、气动肌肉三8与气动肌肉四11、气动肌肉五12、气动肌肉六13以一定的角度交错均匀分布。气动肌肉七18、气动肌肉八20、气动肌肉九21、气动肌肉十23、气动肌肉十一24、气动肌肉十二26的分布方式与气动肌肉一5、气动肌肉二7、气动肌肉三8、气动肌肉四11、气动肌肉五12、气动肌肉六13的分布方式一致。连接板一4、气动肌肉一5、中间支杆一6、气动肌肉二7、气动肌肉三8、连接板二9组成的并联机构与连接板二9、中间支杆二10、气动肌肉四11、气动肌肉五12、气动肌肉六13、连接板三14组成的并联机构串联,可以增加腰关节绕X轴、Y轴转动角度。连接板四17、气动肌肉七18、中间支杆三19、气动肌肉八20、气动肌肉九21、连接板五22、气动肌肉十23、气动肌肉十一24、中间支杆四25、气动肌肉十二26、连接板六27同样组成串联形式存在的并联机构。连接板一4、气动肌肉一5、中间支杆一6、气动肌肉二7、气动肌肉三8、连接板二9、中间支杆二10、气动肌肉四11、气动肌肉五12、气动肌肉六13、连接板三14组成串联形式存在的并联机构,与连接板四17、气动肌肉七18、中间支杆三19、气动肌肉八20、气动肌肉九21、连接板五22、气动肌肉十23、气动肌肉十一24、中间支杆四25、气动肌肉十二26、连接板六27组成串联形式存在的并联机构并联,可以增加腰关节的刚度和承载能力。
腰关节气动马达一28的壳体在Y轴正方向与腰关节上侧板15固定连接,腰关节气动马达一28的转子在Y轴正方向与腰关节下侧板30固定连接;腰关节气动马达二29的壳体在Y轴负方向与腰关节上侧板15固定连接,腰关节气动马达二29的转子在Y轴负方向与腰关节下侧板30固定连接。腰关节气动马达一28与腰关节气动马达二29一起驱动腰关节上侧板15、腰关节下侧板30绕Y轴的相对转动。腰关节气动马达三32的壳体与腰关节下侧板30固定连接,腰关节气动马达三32的转子与腰关节带轮一31固定连接;髋关节连接件35与腰关节下侧板30可转动连接,同时与腰关节带轮二34固定连接;腰关节带轮一31与腰关节带轮二34之间通过皮带33传动。
髋关节连接件35与大腿连接件一36固定连接。腰关节气动马达三32依次通过腰关节带轮一31、皮带33、腰关节带轮二34、髋关节连接件35、大腿连接件一36驱动大腿连接件一36、腰关节下侧板30之间绕Z轴的相对转动。
大腿连接件二39两端分别与大腿连接件一36、膝关节连接件一46固定连接;膝关节带轮一40、膝关节带轮二41与膝关节连接件一46可转动连接,关节带轮三47、膝关节带轮四48与膝关节连接件一46可转动连接,膝关节带轮一40、关节带轮三47与膝关节连接件二49可转动连接;小腿连接件一50两端分别与膝关节连接件二49、小腿连接件二51固定连接,小腿连接件三54与小腿连接件二51固定连接。膝关节气动肌肉一37、膝关节气动肌肉二38、膝关节气动肌肉五44、膝关节气动肌肉六45与大腿连接件一36固定连接;膝关节气动肌肉一37、膝关节气动肌肉二38组成一组拮抗肌,通过绳索驱动膝关节带轮一40相对于膝关节连接件一46绕X轴转动;膝关节气动肌肉五44、膝关节气动肌肉六45组成一组拮抗肌,通过绳索驱动膝关节带轮三47相对于膝关节连接件一46绕X轴转动;膝关节气动肌肉三42、膝关节气动肌肉四43、膝关节气动肌肉七52、膝关节气动肌肉八53与小腿连接件三54固定连接;膝关节气动肌肉三42、膝关节气动肌肉四43组成一组拮抗肌,通过绳索驱动膝关节带轮二41相对于膝关节连接件一46绕X轴转动;膝关节气动肌肉八53、小腿连接件三54组成一组拮抗肌,通过绳索驱动膝关节带轮四48相对于膝关节连接件一46绕X轴转动。
小腿连接件四57一端与小腿连接件三54固定连接,另一端与脚58可转动连接;小腿气动肌肉一55、小腿气动肌肉二56、小腿气动肌肉三59、小腿气动肌肉四60一端与小腿连接件一50固定连接,另一端与脚58可转动连接,一起驱动小腿连接件四57之间脚58绕X轴、Y轴相对转动。
胸部连接件16、头61之间通过脖子椎骨一62、脖子椎骨二63、脖子椎骨三64连接,脖子椎骨一62、脖子椎骨二63、脖子椎骨三64之间可转动连接,头61、脖子椎骨一62之间可转动连接,胸部连接件16、脖子椎骨三64之间可转动连接。大臂气动肌肉一68、大臂气动肌肉二69、大臂气动肌肉三70、大臂气动肌肉四71、大臂气动肌肉五72、大臂气动肌肉六73两端分别与胸部连接件16、大臂气动肌肉连接板66可转动连接;大臂中间杆一67一端与大臂气动肌肉连接板66固定连接,另一端通过万向节与肩关节气动马达65的转子固定连接,肩关节气动马达65的壳体与胸部连接件16固定连接。大臂气动肌肉一68、大臂气动肌肉二69、大臂气动肌肉三70、大臂气动肌肉四71、大臂气动肌肉五72、大臂气动肌肉六73可以作为主动元件,驱动胸部连接件16、大臂中间杆一67之间绕X轴、Y轴、Z轴的相对转动。大臂中间杆一67与肩关节气动马达65之间的万向节可以保证胸部连接件16、大臂中间杆一67之间绕Y轴、Z轴的相对转动,肩关节气动马达65作为被动元件则保证胸部连接件16、大臂中间杆一67之间绕X轴的相对转动,大臂中间杆一67与肩关节气动马达65之间的万向节与作为被动元件的肩关节气动马达65组合,起到球铰的作用。同时,肩关节气动马达65也可以作为主动元件,驱动胸部连接件16、大臂中间杆一67之间绕X轴的相对转动。大臂气动肌肉七74一端与大臂气动肌肉连接板66可转动连接,另一端与脖子椎骨一62可转动连接;大臂气动肌肉八75一端与大臂气动肌肉连接板66可转动连接,另一端与脖子椎骨二63可转动连接;大臂气动肌肉九76一端与大臂气动肌肉连接板66可转动连接,另一端与脖子椎骨三64可转动连接。大臂气动肌肉七74、大臂气动肌肉八75、大臂气动肌肉九76与大臂气动肌肉一68、大臂气动肌肉二69、大臂气动肌肉三70、大臂气动肌肉四71、大臂气动肌肉五72、大臂气动肌肉六73一起驱动胸部连接件16、大臂中间杆一67之间绕X轴、Y轴、Z轴的相对转动,同时亦可以驱动头61、脖子椎骨一62、脖子椎骨二63、脖子椎骨三64相对于胸部连接件16绕Y轴转动。
由大臂气动肌肉连接板66、大臂中间杆一67、大臂气动肌肉一68、大臂气动肌肉二69、大臂气动肌肉三70、大臂气动肌肉四71、大臂气动肌肉五72、大臂气动肌肉六73、大臂气动肌肉七74、大臂气动肌肉八75、大臂气动肌肉九76、肘关节气动肌肉一77、肘关节气动肌肉二78、肘关节连接件一79、肘关节带轮一80、肘关节带轮二81、肘关节连接件二82、肘关节气动肌肉三83、肘关节气动肌肉四83-2、肘关节气动肌肉五84、大臂中间杆二85、肘关节气动肌肉六86、小臂连接件一87、小臂连接件二88、肘关节气动肌肉七89、肘关节气动肌肉八90、小臂气动肌肉一91、小臂气动肌肉二92、腕关节连接板93、小臂气动肌肉三95、小臂气动肌肉四96、小臂连接件三97、小臂连接件四98组成的肘关节、腕关节与由膝关节气动肌肉一37、膝关节气动肌肉二38、大腿连接件二39、膝关节带轮一40、膝关节带轮二41、膝关节气动肌肉三42、膝关节气动肌肉四43、膝关节气动肌肉五44、膝关节气动肌肉六45、膝关节连接件一46、膝关节带轮三47、膝关节带轮四48、膝关节连接件二49、小腿连接件一50、小腿连接件二51、膝关节气动肌肉七52、膝关节气动肌肉八53、小腿连接件三54、小腿气动肌肉一55、小腿气动肌肉二56、小腿连接件四57、脚58组成的膝关节、踝关节结构一致。腕关节在肘关节气动肌肉一77、肘关节气动肌肉二78、肘关节气动肌肉三83、肘关节气动肌肉四83-2、肘关节气动肌肉五84、肘关节气动肌肉六86、肘关节气动肌肉七89、肘关节气动肌肉八90的作用下绕Y轴转动。腕关节在小臂气动肌肉一91、小臂气动肌肉二92、小臂气动肌肉三95、小臂气动肌肉四96的作用下绕X轴、Y轴转动。气爪94与腕关节连接板93固定连接,气爪94绕X轴转动,同时具有沿Y轴、Z轴直线运动。
计算机99通过上位机程序、以及运动学、动力学、控制器与上肢关节控制系统100、腰关节控制系统101、下肢关节控制系统102通信,进而实现对上肢关节1、腰关节2、下肢关节3的控制。
上肢关节控制系统100、腰关节控制系统101、下肢关节控制系统102控制高速开关阀或者气动比例压力阀对各气动肌肉、气动马达进行控制,以实现机器人各关节和整个机器人运动到预定的位姿。
本发明,通过控制各气动肌肉和气动马达,实现基于气动的仿人型机器人位姿的控制,可以动态形象的模拟人的动作,并且可以实现精确的轨迹控制,本发明拥有其他基于气动的仿人型机器人无法比拟的优势。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
- 一种基于气动肌肉的仿人型机器人系统
- 一种基于气动肌肉与气缸的仿人型机器人系统