一种可调负载的大行程重力卸载装置
文献发布时间:2023-06-19 11:09:54
技术领域
本发明属于航天器回收着陆及低重力地外天体着陆起飞试验技术领域,尤其涉及一种可调负载的大行程重力卸载装置。
背景技术
随着航天技术不断发展,地外行星探测成为人类探索宇宙的重要方向之一。以触地关机的探测器于地外天体表面的着陆过程作为研究背景,为获得触地关机过程中关键设计参数,需要进行探测器触地关机的地面验证试验。为了对触地关机过程进行模拟,需要一种力卸载装置,不仅要实现与已有试验架系统进行快速机械对接,还要确保在触地过程中作用到探测器质心处的加速度达到目标地外天体地表的重力加速度。
目前有多种方式可以实现在地球表面模拟低重力或微重力环境,如气浮法,落塔法,呕吐彗星飞行器,气球悬挂法和拉簧机构重力补偿法等。气浮法借助气浮平台产生一定压力的空气与重力实现平衡,该方法对试验环境要求较高,且实现低重力或微重力的行程有限;落塔法和呕吐彗星飞行器利用产生垂直向下的加速度实现低重力或微重力环境,当下落加速度达到地球重力加速度9.8m/s
发明内容
本发明的技术解决问题:克服现有技术的不足,提供一种可调负载的大行程重力卸载装置,能够实现与已有试验架系统进行快速机械对接,确保在着陆器着陆过程中实现低重力与微重力环境;构型简单,有效行程大,负载可调,适用于模拟在低重力环境下发动机关机后的探测器着陆于地外天体表面的工况试验。
为了解决上述技术问题,本发明公开了一种可调负载的大行程重力卸载装置,包括:恒拉力机构和支撑框架;
支撑框架固定在低重力模拟试验平台快速随动系统上;
恒拉力机构安装在支撑框架上,用于实现可调负载的大行程重力卸载。
在上述可调负载的大行程重力卸载装置中,恒拉力机构,包括:拉力调节机构、并联弹簧组、导向杆,钢丝绳Ⅰ、支撑底座、定滑轮Ⅰ、前叉、摆动杆、定滑轮Ⅱ和钢丝绳Ⅱ;
拉力调节机构和支撑底座安装在支撑框架上;
并联弹簧组的一端与拉力调节机构相连,另一端通过钢丝绳Ⅰ绕过定滑轮Ⅰ与前叉相连;
前叉以转动副的形式与摆动杆连接;
摆动杆以转动副的形式与支撑底座相约束;
导向杆一端与并联弹簧组固连,另一端与支撑底座固连;
定滑轮Ⅱ以转动副与摆杆连接;
钢丝绳Ⅱ一端与负载固连,另一端跨过定滑轮Ⅱ与支撑底座固连。
在上述可调负载的大行程重力卸载装置中,负载上下运动过程中,负载重力通过钢丝绳Ⅱ和定滑轮Ⅱ传递给摆杆,前叉将摆杆的力通过钢丝绳Ⅰ传递给并联弹簧组,依靠并联弹簧组的弹力实现负载重力的平衡。
在上述可调负载的大行程重力卸载装置中,导向杆,用于减小并联弹簧组自身的重量带来的影响,保证并联弹簧组的直线运动。
在上述可调负载的大行程重力卸载装置中,前叉与摆动杆的连接点的位置可调,通过改变前叉与摆动杆的连接点的位置实现行程大小的调节。
在上述可调负载的大行程重力卸载装置中,所述可调负载的大行程重力卸载装置通过改变前叉与摆动杆的连接点的位置实现最大行程800mm范围的重力卸载。
在上述可调负载的大行程重力卸载装置中,拉力调节机构,包括:安装底板,滚珠直线导轨,丝杠、连接杆和连接杆支座;
安装底板安装在支撑框架上;
滚珠直线导轨和丝杠横向安装在安装底板上;
连接杆支座安装在滚珠直线导轨上,可在丝杠作用下沿滚珠直线导轨横向运动;
连接杆的一端固定在连接杆支座上,另一端与并联弹簧组的一端连接。
在上述可调负载的大行程重力卸载装置中,丝杠旋转带动连接杆支座的横向移动,进而带动连接杆产生横向位移,连接杆的横向位移带动相连的并联弹簧组的收缩与伸长,进而改变可调负载的大行程重力卸载装置的额定负载,实现不同质量负载的重力卸载。
本发明具有以下优点:
(1)本发明公开了一种可调负载的大行程重力卸载装置,不仅能够实现与已有试验架系统快速机械对接,还能确保在触地过程中作用到探测器质心处的加速度达到目标地外天体地表的重力加速度。
(2)本发明公开了一种可调负载的大行程重力卸载装置,可实现行程大小的调节,在最大行程(800mm)范围内重力卸载,且卸载率达到90%以上。
(3)本发明公开了一种可调负载的大行程重力卸载装置,通过调整拉力调节机构可改变装置的额定负载,实现不同质量负载的重力卸载。
附图说明
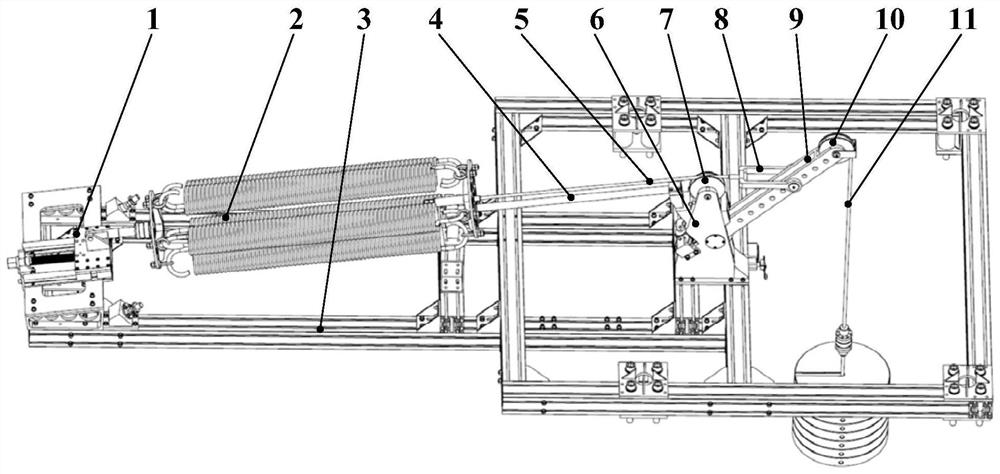
图1是本发明实施例中一种可调负载的大行程重力卸载装置的结构示意图;
图2是本发明实施例中一种拉力调节机构的结构示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
如图1,在本实施例中,该可调负载的大行程重力卸载装置,包括:恒拉力机构和支撑框架3。其中,支撑框架3固定在低重力模拟试验平台快速随动系统上;恒拉力机构安装在支撑框架3上,用于实现可调负载的大行程重力卸载。
在本实施例中,恒拉力机构具体可以包括:拉力调节机构1、并联弹簧组2、导向杆4,钢丝绳Ⅰ5、支撑底座6、定滑轮Ⅰ7、前叉8、摆动杆9、定滑轮Ⅱ10和钢丝绳Ⅱ11。其中,拉力调节机构1和支撑底座6安装在支撑框架3上;并联弹簧组2的一端与拉力调节机构1相连,另一端通过钢丝绳Ⅰ5绕过定滑轮Ⅰ7与前叉8相连;前叉8以转动副的形式与摆动杆9连接;摆动杆9以转动副的形式与支撑底座6相约束;导向杆4一端与并联弹簧组2固连,另一端与支撑底座6固连;定滑轮Ⅱ10以转动副与摆杆9连接;钢丝绳Ⅱ11一端与负载固连,另一端跨过定滑轮Ⅱ10与支撑底座6固连。
其中,负载上下运动过程中,负载其重力产生的力通过钢丝绳Ⅱ11和定滑轮Ⅱ10传递给摆杆9,前叉8将摆杆9的力通过钢丝绳Ⅰ5传递给并联弹簧组2,依靠并联弹簧组2弹簧的弹力实现负载重力的平衡。也即,负载上下运动产生的力最终传递至并联弹簧组2,进而带动并联弹簧组2的伸长与收缩,等效于用一根零自由长度弹簧直接与负载相连,从而实现负载的重力卸载,实现负载的重力卸载。其中,导向杆4的作用在于:降低了并联弹簧组2自身的重量带来的影响,保证并联弹簧组2的直线运动。此外,还可以通过调节拉力调节机构1可以改变装置的额定负载质量,实现同一装置下不同质量负载的重力卸载。
在本实施例中,前叉8与摆动杆9的连接点的位置可调,可通过改变前叉8与摆动杆9的连接点的位置实现行程大小的调节。例如,通过改变前叉8与摆动杆9的连接点的位置,可实现最大行程800mm范围的重力卸载。
在本实施例中,如图2,拉力调节机构1具体可以包括:安装底板12,滚珠直线导轨13,丝杠14、连接杆15和连接杆支座16。其中,安装底板12安装在支撑框架3上;滚珠直线导轨13和丝杠14横向安装在安装底板12上;连接杆支座16安装在滚珠直线导轨13上,可在丝杠14作用下沿滚珠直线导轨13横向运动;连接杆15的一端固定在连接杆支座16上,另一端与并联弹簧组2的一端连接。其中,丝杠14旋转带动连接杆支座16的横向移动,进而带动连接杆15产生横向位移,连接杆15的横向位移带动相连的并联弹簧组2的收缩与伸长,进而改变可调负载的大行程重力卸载装置的额定负载,实现不同质量负载的重力卸载。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
- 一种可调负载的大行程重力卸载装置
- 一种可应用于大负载与变行程工况的电磁执行装置