智能驾驶专用测试目标及其控制方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及智能驾驶测试目标领域,特别涉及一种智能驾驶专用测试目标及其控制方法。
背景技术
智能驾驶技术飞速发展,智能驾驶汽车越来越普及,以配备毫米波雷达和激光雷达为代表的智能驾驶车辆逐渐进入到生活。各汽车企业或研究机构在研究汽车AEB(自动紧急制动)功能时,需要对车辆进行行人或动物的自动识别和避让测试。使用真人或真实动物进行测试过于危险。目前存在的AEB测试实验中,使用到的测试道具为纸箱、人型纸板、充气人、服装店的模特或者静态的不可动的人体模型,而针对动物的识别测试更是寥寥。这些简易的、静止的道具存在无法被汽车的雷达感应、无法真实地还原碰撞环境、与汽车碰撞对汽车造成损伤的缺陷。在国内,以宠物狗为主要动物类型时常出现在驾驶环境中。因此,四肢可动的动物目标在国内有着十分可观的市场需求。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种智能驾驶专用测试目标及其控制方法。
本发明提供一种智能驾驶专用测试目标,包括主轴、左臂传动轴、右臂传动轴、左腿传动轴、右腿传动轴、第一传动组件和第二传动组件;
所述左臂传动轴和右臂传动轴相对设置,所述第一传动组件设置在所述主轴的一端,分别连接所述左臂传动轴和右臂传动轴;
所述左腿传动轴和右腿传动轴相对设置,所述第二传动组件设置在所述主轴的另一端,分别连接所述左腿传动轴和右腿传动轴;
所述左臂传动轴和右臂传动轴的转动方向相反,所述左腿传动轴和右腿传动轴的转动方向相反,所述左臂传动轴和左腿传动轴的转动方向相反。
优选地,第一传动组件包括设置在所述主轴一端的第一锥齿轮、设置在所述左臂传动轴上的第二锥齿轮以及设置在所述右臂传动轴上的第三锥齿轮。
优选地,第二传动组件包括设置在所述主轴上的第四锥齿轮、设置在所述左腿传动轴上的第五锥齿轮以及设置在所述右腿传动轴上的第六锥齿轮。
优选地,所述智能驾驶专用测试目标还包括驱动所述主轴转动的驱动电机,以及连接所述主轴和驱动电机的第三传动组件。
优选地,所述智能驾驶专用测试目标还包括可拆卸的连接关节和四肢,所述连接关节包括分别设置在左臂传动轴、右臂传动轴、左腿传动轴以及右腿传动轴远离所述主轴的一端的第一连接件,以及设置在四肢上的第二连接件。
优选地,所述第一连接件和第二连接件插接设置并磁性连接,二者插接部位的截面为正四边形或正多边形。
优选地,所述智能驾驶专用测试目标还包括容纳所述主轴、左臂传动轴、右臂传动轴、左腿传动轴、右腿传动轴、第一传动组件和第二传动组件的壳体。
优选地,所述智能驾驶专用测试目标还包括与所述壳体磁性连接的支撑杆,所述支撑杆用于连接外部移动平台。
优选地,所述智能驾驶专用测试目标还包括包裹所述壳体的躯干件,以及设置在所述躯干件一端的头部件。
本发明还提出一种智能驾驶专用测试目标的控制方法,应用于上述的智能驾驶专用测试目标,包括以下步骤:
获取智能驾驶专用测试目标的平移速度信息;
根据平移速度信息获取步频信息以及四肢的摆角信息;
根据步频信息以及摆角信息控制驱动电机转动。
本发明的有益效果:
本发明只需一个驱动电机驱动主轴转动,便可再带动连接四肢的四个传动轴转动,通过设置第一传动组件和第二传动组件实现同侧的传动轴的反向转动,从而实现四肢的交叉摆动。
通过设置包括第一连接件和第二连接件的连接关节,实现四肢与传动轴的可拆卸连接,同时在静止状态下,通过调整四肢与主轴之间的安装角度,可实现测试目标在人与四足动物的两种形态的切换。
附图说明
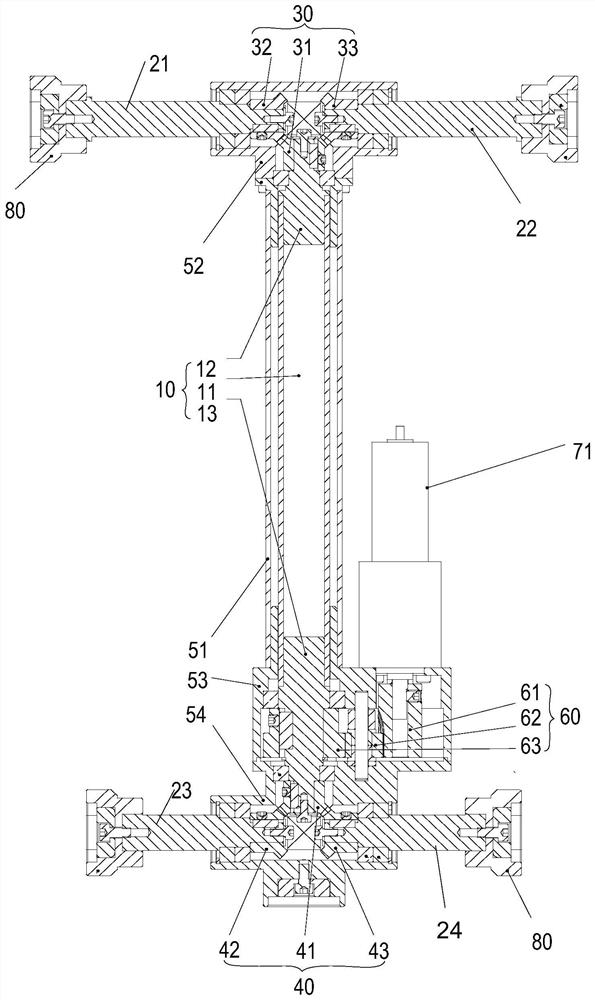
图1为本发明一实施例中智能驾驶专用测试目标的结构示意图;
图2为图1实施例中连接关节的结构示意图;
图3为图1实施例中第一连接件的结构示意图;
图4为图1实施例中第二连接件的结构示意图;
图5为智能驾驶专用测试目标人形状态下的行走示意图;
图6为智能驾驶专用测试目标四足动物形态下的行走示意图;
图7为智能驾驶专用测试目标另一实施例的结构示意图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
实施例1:
参照图1至图7,本发明提供一种智能驾驶专用测试目标,包括主轴10、左臂传动轴21、右臂传动轴22、左腿传动轴23、右腿传动轴24、第一传动组件30和第二传动组件40。所述左臂传动轴21和右臂传动轴22相对设置,二者保持同轴;主轴10则设置在左臂传动轴21和右臂传动轴22之间。所述第一传动组件30设置在所述主轴10的一端,分别连接所述左臂传动轴21和右臂传动轴22。
在本实施例中,左腿传动轴23和右腿传动轴24相对设置,二者保持同轴;主轴10则设置在左腿传动轴23和右腿传动轴24之间。所述第二传动组件40设置在所述主轴10的另一端,分别连接所述左腿传动轴23和右腿传动轴24。所述左臂传动轴21和右臂传动轴22的转动方向相反,所述左腿传动轴23和右腿传动轴24的转动方向相反,所述左臂传动轴21和左腿传动轴23的转动方向相反。
在本实施例中,所述智能驾驶专用测试目标还包括容纳所述主轴10、左臂传动轴21、右臂传动轴22、左腿传动轴23、右腿传动轴24、第一传动组件30和第二传动组件40的壳体。壳体包括第一套筒51、设置在所述第一套筒51上端并相互贯通的第二套筒52、设置在所述第一套筒51下端并相互贯通的安装腔53、以及设置在所述安装腔53下端的第三套筒54。第二套筒52和第三套筒54分别与第一套筒51垂直设置。
具体的,主轴10包括第一安装管11、设置在所述第一安装管11上端的第一轴体12、设置在所述第一安装管11下端的第二轴体13,所述第一轴体12从第二套筒52的一侧伸入第二套筒52内,第二套筒52中设置有安装所述第一轴体12的轴承。第二轴体13贯穿安装腔53设置并伸入第三套筒54内,第三套筒54内设置有安装所述第二轴体13的轴承。
具体的,第一传动组件30包括设置在所述第一轴体12上的第一锥齿轮31、设置在所述左臂传动轴21上的第二锥齿轮32以及设置在所述右臂传动轴22上的第三锥齿轮33。左臂传动轴21从第二套筒52的一端伸入,并通过轴承安装在第二套筒52中;右臂传动轴22从第二套筒52的另一端伸入,并通过轴承安装在第二套筒52中,第二锥齿轮32与第三锥齿轮33相对设置并分别与第一锥齿轮31啮合。
具体的,第二传动组件40包括设置在所述第二轴体13上的第四锥齿轮41、设置在所述左腿传动轴23上的第五锥齿轮42以及设置在所述右腿传动轴24上的第六锥齿轮43。左腿传动轴23从第三套筒54的一端伸入,并通过轴承安装在第三套筒54中;右腿传动轴24从第三套筒54的另一端伸入,并通过轴承安装在第三套筒54中,第五锥齿轮42与第六锥齿轮43相对设置并分别与第四锥齿轮41啮合。
进一步的,所述智能驾驶专用测试目标还包括驱动所述主轴10转动的驱动电机71,以及连接所述主轴10和驱动电机71的第三传动组件60。驱动电机71设置在安装腔53的一侧,第三传动组件60包括设置在输出轴与第二轴体13之间,并位于安装腔53中的传动齿轮组,该传动齿轮组包括设置在安装腔53中并与所述第二轴体13和输出轴平行设置的安装轴,传动齿轮组还包括设置在传动轴上的第一齿轮61、设置在安装轴上的第二齿轮62以及设置在第二轴体13上的第三齿轮63,第二齿轮62分别与第一齿轮61和第二齿轮62啮合。
本发明只需一个驱动电机71驱动主轴10转动,便可再带动连接四肢93的四个传动轴转动,通过设置第一传动组件30和第二传动组件40实现相邻的传动轴的反向转动,从而实现四肢93的交叉摆动。
实施例2:
参照图1至图7,本实施例是对实施例1的改进,智能驾驶专用测试目标还包括可拆卸的连接关节80和四肢93,所述连接关节80包括分别设置在左臂传动轴21、右臂传动轴22、左腿传动轴23以及右腿传动轴24远离所述主轴10的一端的第一连接件81,以及设置在四肢93上的第二连接件82。所述第一连接件81和第二连接件82插接设置并磁性连接,二者插接部位的截面为正四边形或正多边形。具体的,第一连接件81的一端设置有方孔81a,在第二连接件82的一端设置有与方孔81a对插的方形凸起,方孔81a底部设置有安装第一磁铁83的第一沉孔,方形凸起上还设置有安装第二磁铁84的第二沉孔。
参照图5,主轴10竖直设置,在静止状态下,四肢93保持竖直设置并与主轴10平行,此时测试目标为人形。参照图6,主轴10水平设置,在静止状态下,四肢93保持竖直设置并与主轴10垂直,此时测试目标为四足动物的形态。以上两种形态的切换通过调整第一连接件81和第二连接件82的对插角度实现。
本实施例通过设置包括第一连接件81和第二连接件82的连接关节80,实现四肢93与传动轴的可拆卸连接,同时在静止状态下,通过调整四肢93与主轴10之间的安装角度,可实现测试目标在人与四足动物的两种形态的切换。
参照图7,所述智能驾驶专用测试目标还包括与所述壳体磁性连接的支撑杆96,所述支撑杆用于连接外部移动平台。移动平台可以是带有动力的自驱式小车,也可通过绳索以及外部动力牵引运行。具体的连接方式参照连接关节80的结构设置。所述智能驾驶专用测试目标还包括包裹所述壳体的躯干件91,以及设置在所述躯干件91一端的头部件92。躯干件91和头部件采用发泡材料制成,四肢93包括中心骨架94以及设置在中心骨架94外的发泡材料,第二连接件82则设置在中心骨架94上。
本发明中的测试目标,具有比目前市场上的其他产品更高的耐撞击性能以及耐车辆碾压性能。同时,其总重量在行业的法规规定范围内。其更高耐撞击性能是由于其各部位在外力作用下可以各自分离,这就避免了各部位刚性连接的连接处的结构破坏。同时,测试目标的刚性的结构都包裹在柔软的泡沫中,有效的减小了车辆撞击以及撞击跌落时的冲击力。由于本发明中的传动的结构以及骨架采用了金属以及高韧性的非金属材料,在受到大货车碾压后依然可以存活。
本发明中的测试目标并非可以独立行走的机器人,其必须通过外部的移动平台带动才可在测试场地移动,支撑杆96设置在移动平台上。支撑杆96设置并分别与测试目标和移动平台连接的结构。测试目标可通过中空的支撑杆96在外部移动平台的带动下移动,一旦受到超过磁性元件之间的吸引力以及形状配合的保持力的撞击,测试目标的上部与中空支撑杆96就分离开,避免了结构的损坏。支撑杆96采用碳纤维或透明高分子材料制作,具有极高的强度,使其能够经受车辆的碾压。支撑杆96底部设置有连接片,连接片卡入移动平台上,实现测试目标的固定安装。
测试目标内部安置有电源系统和控制模块,电源系统为四肢93的摆动提供源动力。控制模块用于控制加载在电机上的负载,测试目标的四肢93的运动频率或快慢、四肢93摆动的幅度可根据实际的移动速度实现自适应的自动调节。方式一:测试目标中自带GPS系统
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换。
- 智能驾驶专用测试目标及其控制方法
- 智能驾驶专用测试目标