一种高分辨率激光雷达
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及激光雷达技术领域,具体涉及一种结构简单、低成本的高分辨率激光雷达。
背景技术
近年来随着自动驾驶技术的不断发展,激光雷达作为自动驾驶系统的核心部件获得了长足发展,其测量范围可达数百米,测量精度可达毫米级别,具有响应速度快、抗干扰能力强等多种优点。因此,激光雷达在无人机、安防、地形测绘等其他领域也存在广泛的应用前景。
激光扫描组件是激光雷达系统中的重要组成部分,机械式激光雷达使用机械式的激光扫描器件如旋转多边形棱镜等改变激光的出射方向实现大角度扫描,但由于尺寸、重量、成本和功耗等方面的影响,机械式旋转的激光扫描方式被逐渐取代。微机电系统(MEMS)具有体积小、重量低、功耗小等优点,在激光雷达系统中得到广泛的应用和发展,典型的MEMS器件为二维谐振型振镜。然而以二维谐振型振镜为基础的混合固态式激光雷达扫描技术,其成本较高,且扫描视场有限,难以兼顾大扫描视场与高扫描频率。原因在于二维振镜的偏转角度与其工作频率存在矛盾,想要提高振镜的偏转角度只能降低其工作的谐振频率,因此要同时获得大范围偏转角度与较高工作频率的谐振型振镜加工工艺要求极高且制作成本难以控制。
发明内容
本发明是为避免上述现有激光扫描技术所存在的不足之处,提供一种结构简单、低成本的高分辨率激光雷达设计方案。
为了实现上述目的,本发明采用的技术方案为:
一种高分辨率激光雷达,所述激光雷达包括激光发射单元、准直单元、分光单元、数字微镜器件、聚焦单元和探测器单元组成。
所述激光发射单元用于发射纳秒级脉宽的脉冲激光束;
所述准直单元用于将激光光束准直,减小发散角;
所述分光单元用于将激光光束反射至数字微镜器件,并将激光回波光束透射至探测器单元;所述数字微镜器件可以作为衍射光栅,用于将激光光束以不同的衍射级数出射;
所述聚焦单元用于将透射过分光单元的激光回波光束聚焦至探测器。
所述激光发射单元的数量为N,则所述准直单元数量为N;每一束激光入射至数字微镜器件表面可分时产生5束衍射光束,分别为-2级、-1级、0级、1级、2级衍射光束,则N个激光器可分时产生5N束衍射光束。
所述数字微镜器件由一组微镜阵列组成,每个微镜可以沿着其对角线旋转±
所述激光器个数为1时,所述激光器经所述分光单元反射后入射至所述数字微镜器件表面的入射角为
所述高分辨率激光雷达可通过增加激光发射单元的数量N,实现更高的出射光束密度,进而可以较低的成本实现激光雷达分辨率的提升。
与已有技术相比,本发明有益效果体现在:
1、使用数字微镜器件作为激光扫描器件,每一束纳秒级脉冲激光入射至数字微镜器件表面可分时产生5束衍射光束,以较低成本同时满足大扫描角度和高分辨率的要求;
2、可通过增加激光发射单元的数量N,实现更高的出射光束密度,进而以较低的成本实现激光雷达分辨率的提升;
3、基于共光路测量原理,仅使用一个偏振单元和探测单元,通过改变测量光束与回波光束的偏振态,实现触发信号和探测信号的测量,有效减小了激光雷达的体积,实现一种结构简单、紧凑的高分辨率激光雷达。
附图说明
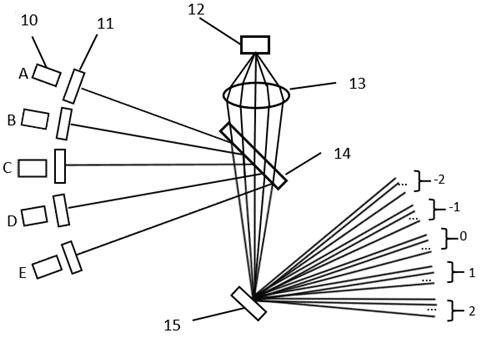
图1是本发明示出的一种激光雷达的原理示意图;
图2是本发明示出的一种激光雷达的控制系统示意图。
具体实施方式
为使本发明的上述目的、特征和优点能够更直观易懂,下面结合附图对本发明的具体实施方式做详细的说明。需要说明的是,本申请实施例提供的技术方案以五个发射单元作为基础进行详细说明,在具体实施时,可根据所需的实际视场角与分辨率修改发射单元的数量,以实现不同水平的需求。因此,技术人员具体实施时可在权利要求范围内进行修改,本实施例不代表本发明的唯一实施方式。
本发明的激光雷达技术方案具体实施例如图1所示,包括激光发射单元10、准直单元11、分光单元14、数字微镜器件15、聚焦单元13和探测器单元12组成。激光发射单元10用于发射纳秒级脉宽的脉冲激光束;准直单元11用于将激光光束准直,减小发散角;分光单元14用于将激光光束反射至数字微镜器件,并将激光回波光束透射至探测器单元;数字微镜器件15可以作为衍射光栅,用于将激光光束以不同的衍射级数出射;聚焦单元13用于将透射过分光单元的激光回波光束聚焦至探测器。
图1为本发明的激光雷达系统原理示意图,激光发射单元10发射出脉宽小于10纳秒的脉冲红外激光光束后,由准直单元11将激光光束准直后射入分光单元14。分光单元14包括偏振分光棱镜和四分之一波片,偏振分光棱镜用于将脉冲激光光束反射后第一次穿过四分之一波片射入数字微镜器件15,激光光束由被测物反射后沿原路返回第二次通过四分之一波片后其偏振态发生改变,从反射的S光变为透射的P光,此时可以穿过分光单元14后由聚焦单元13聚焦在探测器单元14的探测中心。数字微镜器件14用于将每一束由分光单元14反射的激光光束分别以-2、-1、0、1、2级当中特定的衍射级数射出。
数字微镜器件由一组微镜阵列组成,每个微镜可以沿着其对角线旋转±12°实现开关两个状态,开关状态转换的时间为微秒级。因此在开关状态转换的过程中,使用脉宽小于10ns的脉冲激光光束照射微镜阵列时,可以将微镜阵列作为一个可编程的闪耀光栅。微镜在开关状态转换的过程中,使脉冲激光光束在微镜的倾斜角为闪耀角时射入,可以将脉冲激光光束按要求衍射成-2级、-1级、0级、1级、2级5种不同的衍射级数,每种衍射级数对应的微镜阵列的旋转角度分别为-10.3°、-5.8°、0°、+4.9°、+12°,衍射效率可以接近100%。每一束激光光束可以产生五条衍射激光光束,对于本发明示出的激光雷达系统,5个发射单元可分时产生25束激光光束。
发射单元个数为1时,所述发射单元经所述分光单元反射后入射至所述数字微镜器件表面的入射角为30
图2为本发明示出的一种激光雷达控制系统原理图,包括微处理器20、激光器21、数字微镜器件22、同步控制器23、计时模块24、信号处理电路25与APD探测器26。微处理器控制20控制同步控制器23分时驱动ABCDE五个激光器,每个激光器在数字微镜器件的一次开关状态转换过程中产生五次脉冲激光光束,每个脉冲激光光束对应的数字微镜器件中微镜阵列的偏转角为衍射角,故每个激光器产生五次高效率的脉冲衍射激光光束,使激光雷达的扫描频率和分辨率可随激光器的增加而提高,同时实现激光雷达的高分辨率与高扫描频率。同步控制器需进行实验标定以满足激光雷达系统的定时精度。数字微镜器件的开关状态转换运动过程为非线性,使用非线性拟合可使该非线性误差降到最小。本系统计时模块使用TDC-GP22芯片实现高精度计时,由APD探测器收集由被测物反射回的脉冲激光光束,经信号处理电路进行跨阻放大、电压比较等处理电路产生脉冲电信号输入给计时模块,作为激光雷达单点测量结束的触发信号。整个激光雷达系统结构简单、成本较低且能同时实现高分辨率与高扫描频率。
尽管已经示出和描述了本发明的实施例,对于本领域的技术人员,可以在不脱离本发明的原理和精神的情况下对实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种高分辨率广角车载激光雷达镜头
- 一种高分辨率激光雷达