一种鱼眼镜头动态量测设备及光轴检测方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及一种鱼眼镜头检测领域,特别是涉及一种鱼眼镜头动态量测设备及光轴检测方法。
背景技术
随着光学技术的不断发展,鱼眼镜头这类视场角超过180度的镜头越来越受到人们的重视和欢迎,应用也越来越普及。为使镜头达到最大的视场角,其前镜片的直径呈抛物状向镜头前部凸出,鱼眼镜头的视场角能达到甚至超出人眼所能看到的范围。由于鱼眼镜头的视场角常常达到180度以上,因此在鱼眼镜头的生产检测过程中,常规的投影检测所使用的平面测试卡无法检测到160度以上的角度,所以存在检测死角;为了克服这一缺陷,专门针对这类超广角镜头设计出了一种半球面测试卡来进行拍摄测试,然而半球面测试卡不仅制作工艺复杂,而且在进行测试时,由于需要打光均匀,因此对打光技术要求较高,不易实现。此外,在测试不同参数时,需依序更换不同的测试卡,过程相当费时费工。
关于镜头之光轴检测校准方法,经检索,中国专利号CN201611178375.2,授权公告日为2019年2月26日,发明创造名称为:一种超广角镜头的光轴检测校准方法,该申请案包括以下步骤:获取超广角镜头在理想状态下对图卡进行成像所得到的标准像;将待校准超广角镜头采用夹具夹持,调整所述夹具与图卡之间的距离,使其为d;根据图卡上各同心圆原像之间的距离以及标准像中各同心圆图像之间的距离计算各椭圆图像与标准像中该椭圆图像所对应的同心圆图像之间的夹角;将待校准超广角镜头的成像平面逆着倾斜方向旋转倾斜角度,得到待校准超广角镜头的倾斜校正成像平面。该申请案不受广角镜头大畸变的影响,可以精确检测广角镜头的倾斜角度;但该申请案不适用于立体半球面图卡,且采用检测以及校正的步骤复杂费时,还需进一步改进。
发明内容
为了克服现有技术的不足,本发明的目的在于提供一种结构简单,容易实现,生产成本低,测量准确,效率高的鱼眼镜头动态量测设备。
为解决上述问题,本发明所采用的技术方案如下:
一种鱼眼镜头动态量测设备,包括机械手臂和安装平台,所述安装平台上可拆卸安装有鱼眼镜头,所述机械手臂的数量为至少两个,所述机械手臂与安装平台相对转动设置,所述鱼眼镜头的光轴与机械手臂的中心轴相重合,所述机械手臂内侧间隔设有若干个发光均匀的光源,每个光源与鱼眼镜头之间的距离相同,若干个所述光源上分别安装有测试卡。
进一步地,所述光源为发光均匀的LED光源。
进一步地,所述机械手臂的数量为2-4个。
进一步地,每个所述机械手臂上分别对应安装有用于测试不同性能参数的测试卡。
进一步地,每个所述测试卡均与以鱼眼镜头为圆心的圆弧相切。
一种基于鱼眼镜头动态量测设备的光轴检测方法,所述机械手臂上间隔分布有若干个贯穿机械手臂设置的孔洞,若干个所述孔洞的中心处于同一平面内,若干个所述孔洞与若干个光源相间设置,每个孔洞处均对应设置有点光源,所述点光源到机械手臂内侧面的垂直距离大于零,该检测方法包括,启动鱼眼镜头进行拍摄,得到图片,将图片上的上属于同一机械手臂上的若干个点光源连线而成若干条基准线;
若基准线与机械手臂数量相同且均为直线,则说明鱼眼镜头的光轴与机械手臂的中心轴重合;
若基准线与机械手臂数量相同且其中有基准线为弧线,则说明鱼眼镜头的光轴相对于机械手臂的中心轴有偏倾角但无偏移;
若基准线数量与机械手臂数量不一致,则说明鱼眼镜头的光轴相对于机械手臂的中心轴有偏移。
进一步地,所述孔洞为长条形狭缝。
进一步地,所述点光源位于长条形狭缝的中间位置。
相比现有技术,本发明的有益效果在于:本发明中解决了针对鱼眼镜头设计的半球面测试卡制作困难,同时不易实现均匀打光的问题,设计了一种全新的测试结构;采用这种结构,只需使用现有常规的平面型测试卡即可完成检测,可以同时在不同机械手臂上放置不同检测性能的测试卡,而且由于采用了可相对转动的动态结构,每种测试卡可一次测量出多种视场不同视野的参数数值;相比于现有技术,结构进行了简化,制造工艺简单易实现,而且测量效率和测量准确度显著提高。
附图说明
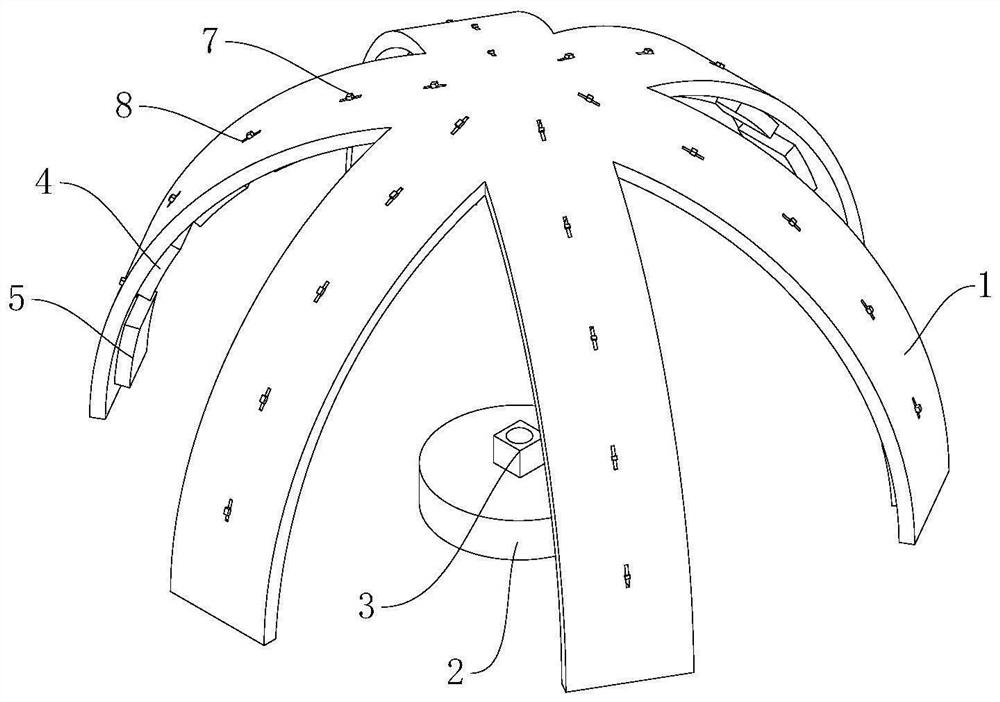
图1为本发明的一种鱼眼镜头动态量测设备的立体结构图;
图2为本发明的一种鱼眼镜头动态量测设备另一视角的立体结构图;
图3为本发明的一种鱼眼镜头动态量测设备的俯视图;
图4为本发明的一种鱼眼镜头动态量测设备的仰视图;
图5为本发明的一种鱼眼镜头动态量测设备中机械手臂数量为一个时的主视图剖视图;
图6为本发明的一种光轴检测方法中的参考示例图;
图7为本发明的一种鱼眼镜头动态量测设备中测试卡的安装方式示意图;
其中,1、机械手臂;2、安装平台;3、鱼眼镜头;4、光源;5、测试卡;6、视场;7、点光源;71、基准线;8、孔洞。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细说明。
需要说明的是,在本发明的技术方案的描述中,为了清楚地描述本发明的技术特征所使用的一些方位词,例如“前”、“后”、“上”、“下”、“顶部”、“底部”、“内”、“外”等均是按照本发明的附图方位而言的。
实施例
如图1、图2、图3和图4所示,本实施例的一种鱼眼镜头动态量测设备,包括机械手臂1和安装平台2,安装平台2上可拆卸安装有鱼眼镜头3,鱼眼镜头3具体的安装方式采用现有技术中的结构,比如卡接或嵌接等。机械手臂1为圆拱状结构或者半球状结构,内侧间隔设有若干个光源4,具体在本实施例中机械手臂1采用圆拱状结构,且机械手臂1的数量为至少两个,一般优选机械手臂1的数量为2-4个,具体在本实施例中优选机械手臂1的数量为3个。机械手臂1与安装平台2相对转动设置。具体在本实施例中,机械手臂1固定设置,具体固定方式为现有技术,安装平台2可转动设置,具体转动方式为现有技术,安装平台2的旋转速度可调,安装平台2转动时即可带动鱼眼镜头3转动,安装平台2底部与驱动装置连接,驱动装置包括驱动电机和减速机,驱动电机与减速机连接,减速机与安装平台2底部连接,驱动电机启动即可通过减速机带动安装平台2旋转,并且可以通过调节驱动电机的转速来调节安装平台2的旋转速度,此外,安装平台2的驱动装置不局限于本实施例中所描述的结构,也可采用现有技术中的其他结构,只要可以实现安装平台2的转动和速度调节即可。
本实施例中鱼眼镜头3的光轴与机械手臂1的中心轴相重合,机械手臂1内侧间隔设有若干个发光均匀的光源4,光源4的具体数量根据具体测试需求而定。光源4采用发光均匀的LED光源,体积小,寿命长,无辐射,可回收,属于绿色照明光源。每个光源4与鱼眼镜头3之间的距离相同。若干个光源4上分别安装有测试卡5,用于检测鱼眼镜头3的性能参数,同一个机械手臂1上的各个测试卡5可以检测不同视场6的参数。每个测试卡5均与以鱼眼镜头3为圆心的圆弧相切。测试卡5可以为解像力测试卡、对比度测试卡、HDR高动态区间测试卡或均匀度测试卡等;每个机械手臂1上分别对应安装有用于测试不同性能参数的测试卡5。例如当需要测试鱼眼镜头3的解像力、对比度和均匀度时,依次在第一个机械手臂1的若干个LED光源上分别安装解像力测试卡,在第二个机械手臂1的若干个LED光源上分别安装对比度测试卡,在第三个机械手臂1的若干个LED光源上分别安装均匀度测试卡,这样既可以同时测试出不同视场角的解像力、对比度和均匀度参数;而当鱼眼镜头3旋转一周后,既可以测试出位于鱼眼镜头3不同视野的解像力、对比度和均匀度参数。采用测试卡5对镜头进行参数测试的具体测试步骤是现有技术,此处不再赘述。本实施例中根据国际规范ISO/FDIS 12233:1999(E),在测试鱼眼镜头3的解像力时,将长方形测试卡5采用5度斜角安装摆放(如图7所示)。
本实施例中的一种鱼眼镜头动态量测设备,解决了针对鱼眼镜头3设计的半球面测试卡制作困难,同时不易实现均匀打光的问题,设计了一种全新的测试结构,该结构中机械手臂1以及机械手臂1上光源4的数量均根据具体测试需求而定。采用这种结构,只需使用现有常规的平面型测试卡即可完成检测,采用平面型测试卡,配合平板型的LED光源即可实现对测试卡5的均匀打光;可以同时在不同机械手臂1上放置不同检测性能的测试卡5,而且由于采用了可相对转动的动态结构,当安装平台2以角速度w旋转一周,鱼眼镜头3以每秒hfps进行拍摄时,每张测试卡5将被拍摄出间隔w/h度的影像,旋转一周将拍摄出(360/w)*h张影像;所以每种测试卡5可一次测量出多种视场不同视野的参数数值。相比于现有技术,结构进行了简化,制造成本降低,制造工艺简单易实现,而且测量效率和测量准确度显著提高。
另外,采用这种动态结构,还可用于测试相机的帧速率极限。由于不同的角速度w与不同的视场6半径,可使测试卡5具有不同的相对移动速度,因此本实施例以其中一个光源4为例,具体检测如下:如图5所示,安装平台2以角速度w旋转,该光源4到鱼眼镜头3之间的距离大小为R,该光源4上的测试卡5中心到鱼眼镜头3的连线与鱼眼镜头3的光轴之间夹角为θ,测试卡5中心与鱼眼镜头3的光轴之间的垂直距离即该测试卡5所对应视场6的半径为R*sinθ,以安装平台2为参照物时测试卡5中心的相对旋转移动速度为w*R*sinθ。当鱼眼镜头3帧速率为f,画素位于与鱼眼镜头3相距为R的位置,拍摄的相邻画素的中心间距为p时,若鱼眼镜头3帧速率f大于(w*R*sinθ)/p,则其相邻画素不会拍摄到有残影(拖影)情况,随着旋转角速度w逐渐增大,当相邻画素拍摄到有残影(拖影)情况时,即鱼眼镜头3帧速率f开始小于(w*R*sinθ)/p,此时即为鱼眼镜头3的帧速率极限。
如图5和图6所示,基于上述鱼眼镜头动态量测设备的一种光轴检测方法,用于检测鱼眼镜头3的光轴相对于机械手臂1的中心轴是否偏移或偏倾,每个机械手臂1上均间隔分布有若干个贯穿机械手臂1设置的孔洞8,若干个孔洞8的中心处于同一平面内,同一个机械手臂1上的若干个孔洞8连线可构成与该机械手臂1弧度相同的弧线,若干个孔洞8与若干个光源4相间设置,每个孔洞8处均对应设置有点光源7,点光源7到机械手臂1内侧面的垂直距离大于零,点光源7采用LED光源,具体在本实施例中,点光源7安装在机械手臂1的外侧面上。该检测方法包括,启动鱼眼镜头3进行拍摄,得到图片,将图片上的上属于同一机械手臂1上的若干个点光源7连线而成若干条基准线71;由于鱼眼镜头3的光轴相对于机械手臂1的中心轴发生的偏移或偏倾一般很小,所以图片上呈现的图案一般分为以下几种情况,
第一种情况:若基准线71与机械手臂1数量相同且均为直线(如图6a所示),则说明鱼眼镜头3的光轴与机械手臂1的中心轴重合;不必校正。
第二种情况:若基准线71与机械手臂1数量相同且其中有基准线71为弧线(如图6b所示),则说明鱼眼镜头3的光轴相对于机械手臂1的中心轴有偏倾角但无偏移;校正时先旋转鱼眼镜头3的光轴直至其中一条基准线71呈直线,此时鱼眼镜头3的光轴是沿着呈直线的这条基准线71的所在轴偏倾,然后将鱼眼镜头3的光轴沿着该呈直线的基准线71的所在轴旋转直至拍到的照片中所有基准线71均为直线。
第三种情况:若基准线71数量与机械手臂1数量不一致,则说明鱼眼镜头3的光轴相对于机械手臂1的中心轴有偏移。具体地,如果照片上仅有一条基准线71且呈直线(如图6c所示),则说明鱼眼镜头3的光轴相对于机械手臂1的中心轴有偏移,且鱼眼镜头3的光轴是沿着该基准线71的所在轴偏移,校正时将鱼眼镜头3的光轴沿着该基准线71的所在轴移动,直至拍到的照片中呈现出与机械手臂1数量相同的若干条基准线71,然后观察若干条基准线71,若均为直线则不必继续校正,若有弧线则采用上述第二种情况中的方法继续进行校正。
第四种情况:如果照片上没有基准线71,则说明鱼眼镜头3的光轴相对于机械手臂1的中心轴有偏移,且偏移方向不与任一机械手臂1重合,此时应先旋转安装平台2直至拍出的照片中能呈现至少一条基准线71,这说明同时具有偏倾,然后参照上述第三种情况中的方法继续进行校正;若旋转鱼眼镜头3或机械手臂1始终不能使拍出的照片中呈现至少一条基准线71,则说明没有偏倾,此时应直接移动鱼眼镜头3的光轴直至直至拍到的照片中所有基准线71均为直线,校正完成。
另外,为了更好的实现上述检测方法,本实施例中的孔洞8为长条形狭缝,长条形狭缝的宽度最大不超过机械手臂1厚度的1/5,优选地长条形狭缝的宽度为机械手臂1厚度的1/50-1/30,采用这种宽度设置,当鱼眼镜头3的光轴发生偏移时,点光源7会被长条形狭缝遮挡从而无法被拍出,可以提高检测的准确性。同时,点光源7位于长条形狭缝的中间位置,这样可以通过拍出的照片检测鱼眼镜头3相对机械手臂1所在半球面的中心是否具有竖直方向的偏移。具体地,若鱼眼镜头3沿竖直方向向上偏移,则拍出的照片中点光源7的位置会偏离长条形狭缝的中间位置而向外侧偏移;反之,若鱼眼镜头3沿竖直方向向下偏移,则拍出的照片中点光源7的位置会偏离长条形狭缝的中间位置而向内侧偏移。
本发明的一种光轴检测方法,用于检测上述鱼眼镜头动态量测设备中鱼眼镜头3的光轴与机械手臂1中心轴是否重合,检测方法直观有效,校正步骤简单方便,整个过程省时省力,容易操作,检测效率高,精准度佳,可以有效保证鱼眼镜头动态量测设备的测量准确度。
对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
- 一种鱼眼镜头动态量测设备及光轴检测方法
- 一种鱼眼镜头动态量测设备