一种塔机智能控制方法及智能控制系统
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及一种塔机控制方法及控制系统,特别是一种塔机智能控制方法及智能控制系统。
背景技术
塔机是一种起重设备,在建筑行业被广泛的应用于建筑工地上;由于塔机的整体的体积较大,多操作塔内的操作员的操作会造成一定的视线盲区,而塔机的控制室又是在地面上,当控制室对操作员发出指令的时候,会与操作员之间会产生一定的时间差,进而影响了整体的工作效率;而且因为工作的时候需要对高度、重量、角度、辐度等数据都要进行实时检测,而塔机控制室内的对这些数据的判定多为人工监测的,在长时间工作后很容易出现监控不到位的现象,导致使用的可靠性较低。因此,在现有的塔机控制过程中存在着使用的可靠性较低和工作效率较低的问题。
发明内容
本发明的目的在于,提供一种塔机智能控制方法及智能控制系统。本发明不仅能够提高使用的可靠性,还具有工作效率高的优点。
本发明的技术方案:一种塔机智能控制方法,包括
A、预警数值设定,首先根据中央控制单元需要控制的塔机型号,通过人际交互界面对塔机工作过程中的吊钩移动的高度单位、小车移动的辐度范围、塔臂旋转的角度范围、吊钩吊重物的重量范围、塔身倾斜的倾角范围和塔机工作环境的风速范围分别设定对应的预警值和报警值,并通过第一信号线输送给中央控制单元进行储存;同时中央控制单元会将小车移动的辐度范围和塔臂旋转的角度范围形成一个区域保护范围,并发送给区域保护模块进行存储;
B、实时信号采集和存储,高度传感器、辐度传感器、重量传感器、角度传感器和倾角仪会将实时检测到的高度数值、辐度数值、重量数值、角度数值和倾角数值作为实时信号通过第一信号线发送给中央控制单元;同时,辐度传感器和角度传感器还会通过第二信号线将实时检测到辐度数值和角度数值传送给区域保护模块;风速仪会对塔机工作环境的风速数值进行实时检测,并通过第一信号线发送给中央控制单元;
C、数据分析,中央控制单元会先将收到的高度数值、辐度数值、重量数值、角度数值和倾角数值先与内部设定的预警值进行预警比较,当高度数值、辐度数值、重量数值、角度数值和倾角数值均小于预警值时,中央控制单元判定工作正常,起升主板、回转主板和变幅主板继续工作;当高度数值、辐度数值、重量数值、角度数值和倾角数值其中一个或者多个大于预警值时,中央控制单元会控制安全模块发出对应的预警信号,并通过人机交互界面显示出来,同时中央控制单元换又会将对应的大于预警值的高度数值、辐度数值、重量数值、角度数值或倾角数值与内部设定的报警值进行报警比较,当高度数值、辐度数值、重量数值、角度数值和倾角数值大于报警值时,中央控制单元就会控制安全模块发出对应的报警信号,然后通过人机交互界面显示出来,同时控制对应的起升主板、回转主板和变幅主板停止工作;
D、区域保护判定,区域保护模块会将接收到的辐度数值和角度数值以辐度作为“X”点,角度作为“Y”点形成一个坐标点,并将该坐标点与区域保护范围进行判定,当该坐标点设置在区域保护范围时,区域保护模块就会通过第一信号线给中央控制单元发送一个提示信号,这时中央控制单元就会直接控制对应的塔机上的起升主板、回转主板和变幅主板停止工作。
前述的一种塔机智能控制方法中,所述步骤A中的区域保护范围是以辐度范围作为“X”轴,角度范围作为“Y”轴。
前述的一种塔机智能控制方法中,所述步骤B中,在中央控制单元接收到高度数值、辐度数值、重量数值、角度数值和倾角数值后会根据接收到的时间进行进行数值存储。
依据前述的一种塔机智能控制方法所构建的智能控制系统,包括人机交互界面、中央控制单元、系统防护模块、限位检测模块、数据记录模块、工作监控模块和安全模块,限位检测模块与安全模块之间电性连接有区域保护模块;所述安全模块的输入端与中央控制单元的输出端电性连接有结构相同的起升主板、回转主板和变幅主板。
前述智能控制系统中,所述限位检测模块包括相互并联设置的高度传感器、辐度传感器、重量传感器、角度传感器和倾角仪,高度传感器、辐度传感器、重量传感器、角度传感器和倾角仪上电性连接有第一信号线;第一信号线的一端部与中央控制单元的输入端电性连接;所述辐度传感器和角度传感器上的第一信号线的一侧设置有第二信号线,第二信号线与区域保护模块的输入端电性连接。
前述智能控制系统中,所述区域保护模块通过第一信号线与起升主板、回转主板和变幅主板电性连接。
前述智能控制系统中,所述系统防护模块包括相互并联的密码输入板和指纹识别器,指纹识别器上电性连接有指纹识别模块;指纹识别模块与中央控制单元的输入端电性连接。
前述智能控制系统中,所述工作监控模块包括风速传感器和涡流传感器。
与现有技术相比,本发明通过将改进了现有的塔机智能控制方法及智能控制系统,通过人机交互界面能够对塔机工作时的高度、重量、幅度、角度等的预警值和报警值进行修改,而且还能够通过人际交互界面将实时检测到的高度、重量、幅度、角度等数值显示出来,从而提高了使用的灵活性和工作效率;然后由中央控制单元将检测到的数值与预警值和报警值进行自动比较,再配合区域保护模块,利用两个独立的报警系统,根据不同的判定规则能够进一步避免安全事故的发生,降低了发生安全事故的发生率,提高了使用的可靠性;同时中央控制单元还会将检测到的实时数据进行存储,使得操作员能够在后续对塔机运行的各个状态下的数据进行提取,从而为管理人员或者决策者提供科学性的分析,提高了科学有效性。此外,本发明还通过设置第一信号线和第二信号线,利用两个信号线分别给区域保护模块和安全模块进行数据比较,避免出现串线的现象,从而提高了使用的稳定性;通过设置相互并联的密码输入板和指纹识别器,从而对整个控制系统的使用进行多种防护,也避免了出现因为忘记密码而不能够使用的现象,从而不仅进一步提高了使用的安全性,也方便了使用;通过设置工作监控模块能够对塔机工作的各个部件的电能情况和环境情况进行检测,避突发情况的现象发生,进一步提高了使用的可靠性。因此,本发明不仅能够提高使用的可靠性,还具有使用灵活度高、使用方便、安全性高、稳定性高和工作效率高。
附图说明
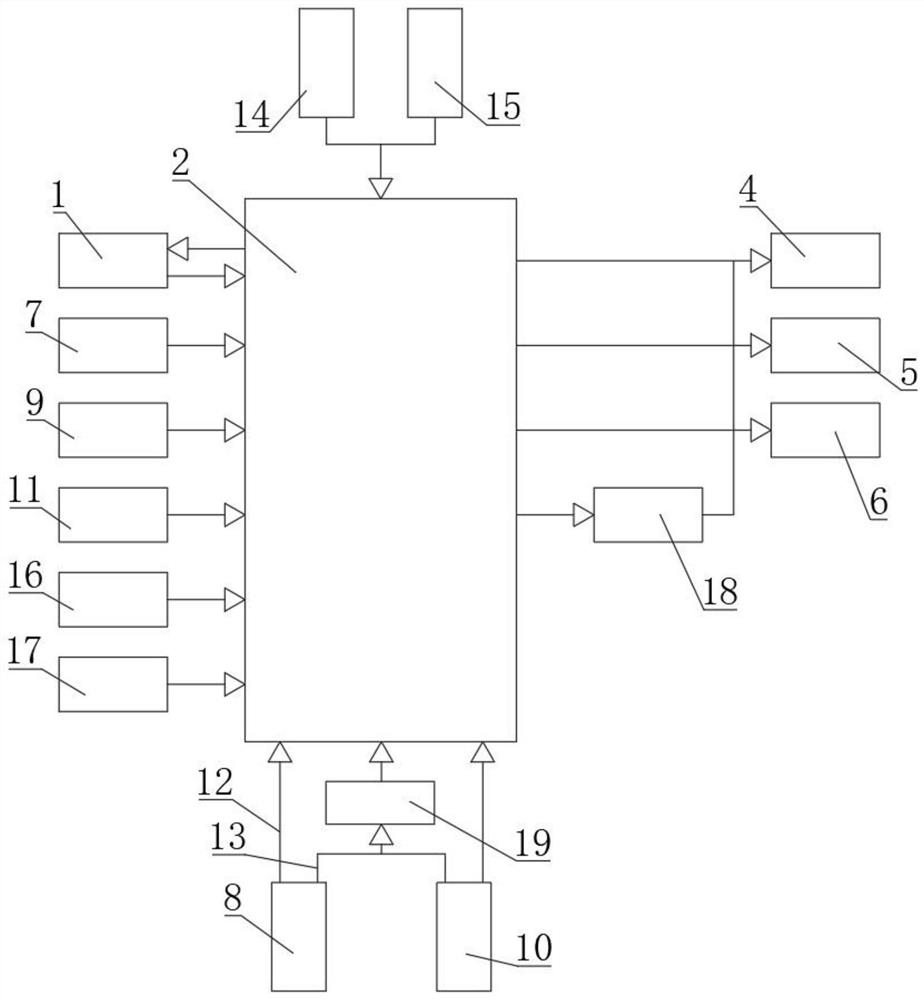
图1是本发明的工作流程图。
附图中的标记为:1-人机交互界面,2-中央控制单元,3-数据记录模块,4-起升主板,5-回转主板,6-变幅主板,7-高度传感器,8-辐度传感器,9-重量传感器,10-角度传感器,11-倾角仪,12-第一信号线,13-第二信号线,14-密码输入板,15-指纹识别器,16-风速传感器,17-涡流传感器,18-安全模块,19-区域保护模块。
具体实施方式
下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
实施例。一种塔机智能控制方法,构成如图1所示,包括
A、预警数值设定,首先根据中央控制单元需要控制的塔机型号,通过人际交互界面对塔机工作过程中的吊钩移动的高度单位、小车移动的辐度范围、塔臂旋转的角度范围、吊钩吊重物的重量范围、塔身倾斜的倾角范围和塔机工作环境的风速范围分别设定对应的预警值和报警值,并通过第一信号线输送给中央控制单元进行储存;同时中央控制单元会将小车移动的辐度范围和塔臂旋转的角度范围形成一个区域保护范围,并发送给区域保护模块进行存储;
B、实时信号采集和存储,高度传感器、辐度传感器、重量传感器、角度传感器和倾角仪会将实时检测到的高度数值、辐度数值、重量数值、角度数值和倾角数值作为实时信号通过第一信号线发送给中央控制单元;同时,辐度传感器和角度传感器还会通过第二信号线将实时检测到辐度数值和角度数值传送给区域保护模块;风速仪会对塔机工作环境的风速数值进行实时检测,并通过第一信号线发送给中央控制单元;
C、数据分析,中央控制单元会先将收到的高度数值、辐度数值、重量数值、角度数值和倾角数值先与内部设定的预警值进行预警比较,当高度数值、辐度数值、重量数值、角度数值和倾角数值均小于预警值时,中央控制单元判定工作正常,起升主板、回转主板和变幅主板继续工作;当高度数值、辐度数值、重量数值、角度数值和倾角数值其中一个或者多个大于预警值时,中央控制单元会控制安全模块发出对应的预警信号,并通过人机交互界面显示出来,同时中央控制单元换又会将对应的大于预警值的高度数值、辐度数值、重量数值、角度数值或倾角数值与内部设定的报警值进行报警比较,当高度数值、辐度数值、重量数值、角度数值和倾角数值大于报警值时,中央控制单元就会控制安全模块发出对应的报警信号,然后通过人机交互界面显示出来,同时控制对应的起升主板、回转主板和变幅主板停止工作;
D、区域保护判定,区域保护模块会将接收到的辐度数值和角度数值以辐度作为“X”点,角度作为“Y”点形成一个坐标点,并将该坐标点与区域保护范围进行判定,当该坐标点设置在区域保护范围时,区域保护模块就会通过第一信号线给中央控制单元发送一个提示信号,这时中央控制单元就会直接控制对应的塔机上的起升主板、回转主板和变幅主板停止工作。
所述步骤A中的区域保护范围是以辐度范围作为“X”轴,角度范围作为“Y”轴;所述步骤B中,在中央控制单元接收到高度数值、辐度数值、重量数值、角度数值和倾角数值后会根据接收到的时间进行进行数值存储。
依据上述的一种塔机智能控制方法所构建的智能控制系统,包括人机交互界面1、中央控制单元2、系统防护模块、限位检测模块、数据记录模块3、工作监控模块和安全模块18,限位检测模块与安全模块18之间电性连接有区域保护模块19;所述安全模块18的输入端与中央控制单元的输出端电性连接有结构相同的起升主板4、回转主板5和变幅主板6。
所述限位检测模块包括相互并联设置的高度传感器7、辐度传感器8、重量传感器9、角度传感器10和倾角仪11,高度传感器7、辐度传感器8、重量传感器9、角度传感器10和倾角仪11上电性连接有第一信号线12;第一信号线12的一端部与中央控制单元2的输入端电性连接;所述辐度传感器8和角度传感器10上的第一信号线12的一侧设置有第二信号线13,第二信号线13与区域保护模块19的输入端电性连接;所述区域保护模块19通过第一信号线12与起升主板4、回转主板5和变幅主板6电性连接;所述系统防护模块包括相互并联的密码输入板14和指纹识别器15,指纹识别器15上电性连接有指纹识别模块;指纹识别模块与中央控制单元2的输入端电性连接;所述工作监控模块包括风速传感器16和涡流传感器17。
工作原理:在使用的时候,先将控制系统连接上外部安全市电,从而启动整个控制系统;接着通过密码输入板14输入启动密码或者通过指纹识别器15输入启动指纹,以使得中央控制单元2启动,中央控制单元2启动后会控制高度传感器7、辐度传感器8、重量传感器9、角度传感器10、倾角仪11、风速传感器16和涡流传感器17启动,其中高度传感器7会对塔机吊钩上升的位置进行检测,并将检测到的数据发送给中央控制单元2,中央控制单元2会将检测到的数据与内部设定的上限数值和下限数值进行比较,当超过上限和下限的时候就会通过安全模块18发出警报并同时控制起升主板4停止工作;例如设置上限预警值为12,报警值为2,下限预警值为60,报警值为10,当上升高度达到12米时,安全模块18给中央控制单元2发出一个预警信号,并通过人机交互界面1显示出来,如果塔机继续上升达到14米时,安全模块18给中央控制单元2发出一个报警信号,并通过人机交互界面1显示出来,同时安全模块18直接控制起升主板4停止工作;同样的当下降的高度达到60米时,发出预警信号并通过人机交互界面1显示出来,如果持续下降到70米时,发出报警信号,通过人机交互界面1显示出来,同时安全模块18直接控制起升主板4停止工作。
当辐度传感器8启动后会对塔机上的下车开离司机室的距离进行检测,并发送给中央控制单元2,并由人机交互界面1显示出来;在判定的过程中跟高度判定方式相同,同样设置有向前幅度预警值、向前幅度报警值、向后幅度预警值和向后幅度报警值,达到预警值只发出预警信号,达到报警值后发出报警信号的同时通过变幅主板6控制小车停止运行;重量传感器9是用于检测吊钩上吊着的重量;风速传感器16是对塔机工作环境的风速进行检测,并通过人机交互界面显示出来,同样设置有预警值和报警值;角度传感器10是用于检测塔臂旋转的角度,中央控制单元内对应设置有左转预警值、左转报警值、右转预警值和右转报警值,当达到对应的预警值时,人机交互界面1只显示出预警信号,当达到报警值后,人机交互界面1显示出报警信号同时控制回转主板5停止工作;倾角仪11是对塔身在工作过程中的倾斜情况进行检测,中央控制单元2内对应的设置有预警值和报警值,当达到对应数值后,会通过人机交互界面1发出对应的预警信号或者报警信号;同时辐度传感器8和角度传感器10还会将检测到的数值发送给区域保护模块19,区域保护模块19内会依据中央控制单元1内设定的对应的报警值形成一个不安全区域,当塔臂在工作过程中进入到该区域内就会通过人机交互界面1直接发出报警信息。
- 一种塔机智能控制方法及智能控制系统
- 一种塔机智能避障吊钩及其控制系统