基板贴合装置、计算装置、基板贴合方法和计算方法
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及基板贴合装置、计算装置、基板贴合方法和计算方法。
背景技术
已知有一种基板贴合方法,在该方法中,维持保持一对基板中的一个基板的状态,解除另一个基板的保持来将另一个基板朝向一个基板释放,由此贴合一对基板(例如,专利文献1)。
专利文献1:日本特开2015-95579号公报
在上述的方法中,关于在贴合时释放的一个基板,不论该基板的弯曲状态如何,都在同一条件下按压中心部而变形为中凸形状,使其中心部与另一个基板的中心部抵接,而使相互贴合的区域朝向外周方向依次扩大。因此,根据贴合的一个基板的弯曲状态,在贴合的二个基板间产生的位置偏移量有时大幅不同。
发明内容
在本发明的一个方式中,提供一种基板贴合装置,具备:第一保持部,其保持第一基板;以及第二保持部,其保持第二基板,在第一基板的一部分与第二基板的一部分之间形成初始贴合区域,并通过从第二保持部释放形成了初始贴合区域的第二基板,来将第一基板和第二基板贴合,基于与第二基板的形变相关的信息来设定初始贴合区域。
在本发明的一个方式中,提供一种计算装置,其计算参数,该参数在使第一基板与变形为凸状的第二基板在分别保持的状态下相互接触并通过解除第二基板的保持来将第一基板和第二基板贴合时所使用,其中,基于与第二基板的形变相关的信息来计算使第二基板变形为凸状的凸量、为了保持第二基板而吸附第二基板的外周部分的吸附面积、以及解除第二基板的保持的定时中的至少一个。
在本发明的一个方式中,提供一种基板贴合装置,具备:第一保持部,其保持第一基板;以及第二保持部,其保持第二基板,在使第一基板的一部分与第二基板的一部分接触之后形成初始贴合区域,并通过从第二保持部释放形成了初始贴合区域的第二基板,来将第一基板和第二基板贴合,初始贴合区域是第一基板与第二基板之间的贴合后的位置偏移为阈值以下的大小。
在本发明的一个方式中,提供一种基板贴合装置,具备:第一保持部,其保持第一基板;以及第二保持部,其保持第二基板,在第一基板的一部分与第二基板的一部分之间形成初始贴合区域,并通过从第二保持部释放形成了初始贴合区域的第二基板,来将第一基板和第二基板贴合,该基板贴合装置还具备判断部,该判断部对形成了初始贴合区域这一情况进行判断,在由判断部判断为形成了初始贴合区域的情况下,第二保持部释放第二基板。
在本发明的一个方式中,提供一种基板贴合方法,具备:将第一基板保持于第一保持部的阶段;将第二基板保持于第二保持部的阶段;在第一基板的一部分与第二基板的一部分之间形成初始贴合区域的阶段;以及通过从第二保持部释放形成了初始贴合区域的第二基板来将第一基板和第二基板贴合的阶段,基于与第二基板的形变相关的信息来设定初始贴合区域。
在本发明的一个方式中,提供一种计算方法,其计算参数,该参数在使第一基板与变形为凸状的第二基板在分别保持的状态下相互接触并通过解除第二基板的保持来将第一基板和第二基板贴合时所使用,其中,该计算方法具备如下的阶段:基于与第二基板的形变相关的信息来计算使第二基板变形为凸状的凸量、为了保持第二基板而吸附第二基板的外周部分的吸附面积、以及解除第二基板的保持的定时中的至少一个参数。
在本发明的一个方式中,提供一种基板贴合方法,具备:将第一基板保持于第一保持部的阶段;将第二基板保持于第二保持部的阶段;在第一基板的一部分与第二基板的一部分之间形成初始贴合区域的阶段;以及通过从第二保持部释放形成了初始贴合区域的第二基板来将第一基板和第二基板贴合的阶段,初始贴合区域是第一基板与第二基板之间的贴合后的位置偏移为阈值以下的大小。
在本发明的一个方式中,提供一种基板贴合方法,具备:将第一基板保持于第一保持部的阶段;将第二基板保持于第二保持部的阶段;在第一基板的一部分与第二基板的一部分之间形成初始贴合区域的阶段;对形成了初始贴合区域这一情况进行判断的阶段;以及在判断为形成了初始贴合区域的情况下,通过从第二保持部释放形成了初始贴合区域的第二基板,来将第一基板和第二基板贴合的阶段。
上述的发明的概况并没有列举本发明的全部的必要特征。这些特征组的子组合也可成为发明。
附图说明
图1是基板贴合装置100的示意性俯视图。
图2是基板210、230的示意性俯视图。
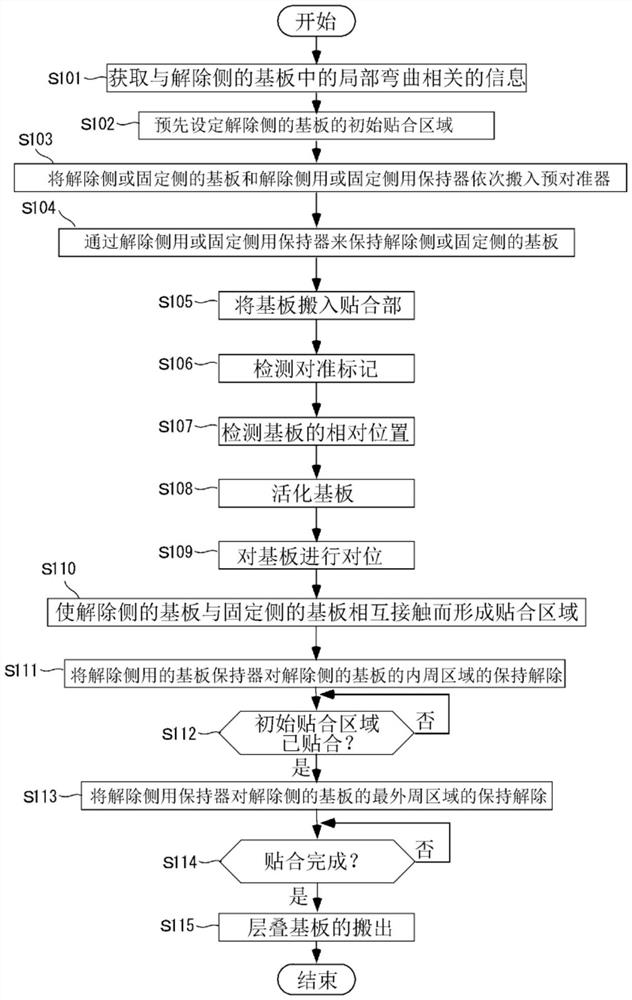
图3是表示将基板210、230层叠来制成层叠基板290的顺序的流程图。
图4是基板保持器220的示意性俯视图(A)、和在示意性俯视图(A)的I-I线处切断的情况下的保持基板210的基板保持器220的示意性剖视图(B)。
图5是基板保持器240的示意性俯视图(A)、和在示意性俯视图(A)的II-II线处切断的情况下的保持基板230的基板保持器240的示意性剖视图(B)。
图6是贴合部300的示意性剖视图。
图7是贴合部300的示意性剖视图。
图8是贴合部300的示意性剖视图。
图9是贴合部300的示意性剖视图。
图10是表示贴合过程中的基板210、230的状态的示意性剖视图。
图11是贴合部300的示意性剖视图。
图12是表示贴合过程中的基板210、230的状态的示意性剖视图。
图13是表示贴合过程中的基板210、230的状态的示意性俯视图。
图14是表示贴合过程中的基板210、230的状态的示意性剖视图。
图15是对检测器342的动作进行说明的示意性剖视图。
图16是对检测器342的动作进行说明的示意性剖视图。
图17是表示贴合过程中的基板210、230的状态的示意性俯视图。
图18是表示贴合过程中的基板210、230的状态的示意性剖视图。
图19是表示具有平坦的保持面的固定侧用的基板保持器240上的基板210、230的贴合过程的局部放大图。
图20是表示具有平坦的保持面的固定侧用的基板保持器240上的基板210、230的贴合过程的局部放大图。
图21是表示具有平坦的保持面的固定侧用的基板保持器240上的基板210、230的贴合过程的局部放大图。
图22是表示因在使用具有平坦的保持面的固定侧用的基板保持器240的情况下产生的空气阻力所引起的倍率形变导致的层叠基板290上的位置偏移的示意图。
图23是表示使用具有弯曲的保持面的固定侧用的基板保持器240修正因空气阻力所引起的倍率形变的情况下的、基板保持器240上的基板210、230的贴合过程的局部放大图。
图24是表示硅单晶基板208中的结晶各向异性与杨氏模量的关系的模式。
图25是表示硅单晶基板209中的结晶各向异性与杨氏模量的关系的模式。
图26是表示在表面形成有以因贴合时会产生的空气阻力所引起的倍率形变以及结晶各向异性所引起的形变导致的层叠基板290上的位置偏移量为预先决定的阈值以下的方式预先修正了配置的多个电路区域216的基板610、630的示意图。
图27是表示在解除侧的基板210具有局部弯曲的情况下产生的非线性形变导致的层叠基板290上的位置偏移的示意图。
图28是对挠曲计测和翘曲的计算方法进行说明的图。
图29是对使用具有外周通气路径822的基板保持器820贴合基板210、230的过程(A)与使用具有最外周通气路径622的基板保持器220贴合基板210、230的过程(B)的对比进行说明的说明图。
图30是基板保持器920的示意性俯视图。
图31是在图30的示意性俯视图的III-III线处切断的情况下的保持基板210的基板保持器920的示意性剖视图。
图32是对使用具有内周通气路径931、外周通气路径932和最外周通气路径933的基板保持器920贴合基板210、230的过程进行说明的说明图。
图33是对根据解除侧的基板210中的总体翘曲的有无来变更初始贴合区域的设定的情况进行说明的说明图。
具体实施方式
以下,对发明的实施方式进行说明。下述的实施方式并没有限定权利要求书所涉及的发明。在实施方式中说明的特征的全部组合未必是发明的解决手段所必须的。
图1是基板贴合装置100的示意性俯视图。基板贴合装置100具备:壳体110;收纳要贴合的基板210、230的基板盒120;收纳贴合至少两个基板210、230而制成的层叠基板290的基板盒130;控制部150;输送部140;贴合部300;收纳保持基板210、230的基板保持器220、240的保持器储存器(Holder Stocker)400;以及预对准器500。对壳体110的内部进行温度管理,例如保持室温。
输送部140输送单独的基板210、230、基板保持器220、240、保持有基板210、230的基板保持器220、240、层叠多个基板210、230而形成的层叠基板290等。控制部150使基板贴合装置100的各部分相互协作来统一进行控制。另外,控制部150接受来自外部的用户的指示,设定在制造层叠基板290的情况下的制造条件。而且,控制部150还具有将基板贴合装置100的动作状态朝向外部显示的用户界面。
贴合部300分别具有经由基板保持器220、240保持基板210、230的对置的一对工作台。贴合部300在将保持于一对工作台的一对基板210、230相互对位之后,在维持一对基板210、230中的一方的保持的状态下,解除另一方的保持,而将另一方朝向一方释放,由此使一对基板210、230相互接触并贴合,从而形成层叠基板290。在以后的说明中,有时将基板210称为固定侧的基板210,将基板230称为解除侧的基板230。
预对准器500分别进行基板210、230与基板保持器220、240的对位,使基板210、230保持于基板保持器220、240。基板保持器220、240由氧化铝陶瓷等硬质材料形成,通过静电卡盘、真空卡盘等吸附并保持基板210、230。
在上述的基板贴合装置100中,除了形成有元件、电路、端子等的基板210、230之外,也能够贴合未加工的硅晶片、添加了Ge的SiGe基板、Ge单晶基板、III-V族或者II-VI族等化合物半导体晶片以及玻璃基板等。贴合的对象可以是电路基板和未加工基板,也可以是未加工基板彼此。贴合的基板210、230其本身也可以是已经具有层叠的多个基板的层叠基板290。
图2是在基板贴合装置100中贴合的基板210、230的示意性俯视图。基板210、230分别具有缺口214、234、多个电路区域216、236、以及多个对准标记218、238。
多个电路区域216、236是形成于基板210、230各自的表面的构造物的一例,在基板210、230各自的表面沿面方向周期性地配设。在多个电路区域216、236中的各个电路区域设置有通过光刻技术等形成的布线、保护膜等构造物。在多个电路区域216、236还配设有在将基板210、230与其他的基板230、210、引线框架等电连接的情况下成为连接端子的焊垫、凸块等连接部。连接部也是形成于基板210、230的表面的构造物的一例。
另外,多个对准标记218、238也是形成于基板210、230的表面的构造物的一例,且配设于在多个电路区域216、236的相互之间配设的刻线212、232。多个对准标记218、238是使基板210、230与其他的基板230、210对位时的指标。
图3是表示在基板贴合装置100中将一对基板210、230层叠而制成层叠基板290的顺序的流程图。这里,预先决定为使基板230为贴合部300的一对工作台的固定侧,使基板210为解除侧。首先,控制部150至少获取与解除侧的基板210中的局部弯曲相关的信息(步骤S101),基于所获取的信息中包含的基板210的局部弯曲的特性,预先设定解除侧的基板210的贴合面的一部分区域亦即初始贴合区域(步骤S102)。此外,与局部弯曲相关的信息包含在与形变相关的信息中。另外,控制部150是基于与形变相关的信息设定初始贴合区域的设定部的一例。
接下来,基于来自控制部150的输出,输送部140将解除侧用的基板保持器220和解除侧的基板210依次搬入至预对准器500(步骤S103)。在预对准器500中,使基板210保持于解除侧用的基板保持器220(步骤S104)。关于固定侧的基板230,也与基板210同样,基于来自控制部150的输出,输送部140将固定侧用的基板保持器240和固定侧的基板230依次搬入至预对准器500(步骤S103),在预对准器500中,使基板230保持于固定侧用的基板保持器240(步骤S104)。
图4是在步骤S104中使用的基板保持器220的示意性俯视图(A)、和在示意性俯视图(A)的基板保持器220的中心处折弯的I-I线处切断的情况下的保持基板210的基板保持器220的示意性剖视图(B)。基板保持器220具有主体部229和突出部件250。
主体部229具有:平坦的保持面221;3个圆环状的支承部225、226、227,其在保持面221上与基板保持器220的中心形成为同心圆状;支承销224,其在保持面221上的多个支承部225等之间大致等间隔地形成了多个;以及凹部223,其在保持面221上的大致中央形成为一端释放的圆筒状。3个支承部225、226、227从基板保持器220的中心侧起依次配置。支承部225的内周面与圆筒状的凹部223的内周面对齐,在保持面221上包围凹部223的周围。支承部227具有与保持于基板保持器220的基板210的外形大致相同的外形。支承部226在保持面221上位于比支承部227稍微靠中心侧的位置,与支承部227一同在基板保持器220的最外周侧形成圆环状的槽。形成在支承部225与支承部226之间的多个支承销224的密度比形成在支承部226与支承部227之间的多个支承销224的密度稀疏。支承部225等和多个支承销224从保持面221突出相同的量,突出的各前端部位于同一平面上。因此,支承部225等和多个支承销224的突出的各前端部都与载置于基板保持器220的基板210接触。此外,在图4的(A)中,为了说明的明确化,省略多个支承销224的图示。以下,有时将基板210的面内的径向的中央侧的区域且为在基板保持器220的支承部225与支承部226之间被吸附的区域称为基板210的内周区域。另外,有时将基板210的面内的径向的外侧的区域且为在基板保持器220的支承部226与支承部227之间被吸附的区域称为基板210的最外周区域。
主体部229还具有:2张板弹簧255,其外周与凹部223的内周壁连接;以及圆柱状的突出部件250,其外周与2张板弹簧255的内周连接。通过板弹簧255从外部受到一定以上的远离凹部223的方向的力而弹性变形,从而突出部件250从支承部225等和多个支承销224的突出的各前端部所在的平面突出。突出部件250在板弹簧255未从外部受到一定以上的远离凹部223的方向的力的状态下,不从该平面突出。此外,突出部件250也可以采用如下的结构:通过板弹簧255的弹力而从该平面突出,并且在从外部受到向凹部223侧的一定以上的压入负荷的情况下,被向凹部223内压入。该情况下的板弹簧255的弹力至少具有使基板210变形所需要的力。
主体部229还具有中心通气路径625、内周通气路径621以及最外周通气路径622。中心通气路径625在一端具有在凹部223的底面开口的排气孔,另一端经由基板保持器220的外部的控制阀721选择性地与正压源731和开放端741结合。内周通气路径621在一端具有大致等间隔地配置的多个吸气孔,该多个吸气孔在保持面221上的支承部225与支承部226之间且未形成多个支承销224的部位开口,另一端经由基板保持器220的外部的控制阀724选择性地与负压源734和开放端744结合。最外周通气路径622在一端具有大致等间隔地配置的多个吸气孔,该多个吸气孔在保持面221上的支承部226与支承部227之间且未形成多个支承销224的部位开口,另一端经由基板保持器220的外部的控制阀727选择性地与负压源737和开放端747结合。最外周通气路径622的一端的多个吸气孔的数量比内周通气路径621的一端的多个吸气孔的数量多,且配设得更密。最外周通气路径622的一端的多个吸气孔为了能够吸附基板210的最外周区域而设置于基板保持器220的最外周,但如图4的(B)所示,通过将最外周通气路径622形成为在基板保持器220的内部沿面方向延伸,从而将其另一端配置为靠近基板保持器220的中心侧。由此,基板保持器220也能够应用于真空板或基板贴合工作台等,该真空板或基板贴合工作台保持基板保持器220并将用于对基板保持器220的各通气路径赋予吸气或者排气的空气配管集中于基板保持器220的保持面的中央来形成。
控制阀724、727在控制部150的控制下,使内周通气路径621、最外周通气路径622分别选择性地与负压源734、737连通。在将基板210载置于支承部225等和多个支承销224上的状态下,在控制阀724、727使内周通气路径621、最外周通气路径622分别与负压源734、737连通的情况下,对内周通气路径621和最外周通气路径622各自的多个吸气孔作用负压。由此,基板210与保持面221之间且支承部225与支承部226之间的空间以及支承部226与支承部227之间的空间分别被减压,基板210被吸附于基板保持器220。另一方面,在从基板210吸附于基板保持器220的状态起,控制阀724、727使内周通气路径621、最外周通气路径622分别与开放端744、747连通的情况下,解除基板保持器220对基板210的吸附。内周通气路径621和最外周通气路径622分别与由控制部150单独控制的控制阀724、727结合,各自的一端的多个吸附孔在由支承部226相互隔离的各空间开口,因此基板保持器220能够在控制部150的控制下,单独地吸附基板210的内周区域和最外周区域,并且能够单独地解除吸附。换言之,基板保持器220具有相互隔离且独立的两个吸附区域。
控制阀721在控制部150的控制下,使中心通气路径625与正压源731和开放端741选择性地连通。在控制阀721使中心通气路径625与正压源731连通的情况下,对中心通气路径625的排气孔作用正压,由凹部223、板弹簧255和突出部件250包围的空间被加压,通过板弹簧255在远离凹部223的方向上弹性变形,从而突出部件250从上述的平面突出,其结果为,位于支承部225的内侧的基板210的一部分区域在该方向上变形。基板保持器220在控制部150的控制下,在吸附基板210的状态下像这样使基板210变形,由此能够使基板210的该一部分区域在远离基板保持器220的方向上急剧地突出,另外通过调整施加的负荷,能够调整其突出量。由控制部150基于基板210的局部弯曲的特性来设定突出部件250的突出量。控制部150通过调整突出部件250的突出量,来调整初始贴合区域803的大小。
在图4的(B)的示意性剖视图中,示出在基板保持器220吸附了基板210的状态下,通过使突出部件250从上述的平面突出,从而使基板210的中央附近的区域C急剧地突出的状态。在图中,到突出部件250的抵接部251为止的高度A比凹部223的深度与支承部225的高度之和B高,抵接部251从上述的平面突出。由此,在吸附于基板保持器220的平坦的基板210的中央附近的区域C形成有急剧地突出的隆起部215。隆起部215的高度D与突出部件250的抵接部251从上述的平面突出的量为相同程度或者比其稍高,例如,在抵接部251突出的量为50μm的情况下,隆起部215的高度D约为70μm。
主体部229还具有:在厚度方向上贯通基板保持器220的3个观察孔601、602、603,其形成于保持面221上的支承部225与支承部226之间且未形成多个支承销224的3个部位;以及在厚度方向上贯通基板保持器220的观察孔604,其形成于保持面221上的支承部226与支承部227之间。4个观察孔601、602、603、604如在图4的(A)的示意性俯视图中与在基板保持器220的中心处折弯的直线状的I-I线重叠地表示的那样,位于沿着基板保持器220的径向的大致同一直线上。3个观察孔601、602、603靠基板保持器220的中心附近,从基板保持器220的中心侧起依次大致等间隔地配置。此外,观察孔601等分别由相对于在观察基板210的情况下使用的照明光的波长为透明的材料来填充,观察孔601等的两端与基板保持器220的两平面一同平滑地形成。
以基板210的规定的部位与基板保持器220的观察孔601等对置的方式,将基板保持器220与基板210对位。具体而言,基于从基板贴合装置100的控制部150发送的与基板210的局部弯曲相关的信息,预对准器500以使基板210的规定的部位位于设置于基板保持器220的观察孔601至604所在的线上的方式,将基板保持器220与基板210对位。例如,预对准器500以使基板210的面内的局部弯曲最大的部位位于设置于基板保持器220的观察孔601至604所在的线上的方式进行对位。
此外,说明了基板保持器220的突出部件250的突出量通过气压来调整的结构,但也可以取代该结构,而使突出部件250能够装卸,通过更换高度不同的多个突出部件250来使突出量可变。由此,也与气压式的突出部件250同样,能够提供所希望的突出量。
图5是基板保持器240的示意性俯视图(A)、和在示意性俯视图(A)的II-II线处切断的情况下的保持基板230的基板保持器240的示意性剖视图(B)。基板保持器240具有主体部249。
主体部249具有:平坦的保持面241;圆环状的支承部247,其在保持面241上与基板保持器240的中心形成为同心圆状;以及支承销244,其在保持面241上的支承部247的内侧大致等间隔地形成了多个。支承部247具有与保持于基板保持器240的基板230的外形大致相同的外形。支承部247和多个支承销244从保持面241突出相同的量,突出的各前端部位于同一平面上。因此,支承部247和多个支承销244的突出的各前端部都与载置于基板保持器240的基板230接触。此外,在图5的(A)中,为了说明的明确化,省略多个支承销244的图示。
主体部249还具备通气路径640,该通气路径640在一端具有大致等间隔地配置的多个吸气孔,该多个吸气孔在保持面241上的支承部247的内侧且未形成多个支承销244的部位开口,另一端经由基板保持器240的外部的控制阀751选择性地与负压源761和开放端771结合。通气路径640的一端的多个吸气孔设置到基板保持器240的最外周,但如图5的(B)所示,通过将通气路径640形成为在基板保持器240的内部沿面方向延伸,从而将其另一端配置于基板保持器220的大致中央。由此,基板保持器240与基板保持器220同样,也能够应用于真空板或基板贴合工作台等,该真空板或基板贴合工作台保持基板保持器240并将用于对基板保持器240的通气路径640赋予吸气的空气配管集中于基板保持器240的保持面的中央来形成。
控制阀751在控制部150的控制下,使通气路径640与负压源761选择性地连通。在将基板230载置于支承部247和多个支承销244上的状态下,在控制阀751使通气路径640与负压源761连通的情况下,对通气路径640的多个吸气孔作用负压。由此,在基板230与保持面241之间且支承部227的内侧的空间被减压,基板230吸附于基板保持器240。另一方面,在从基板230吸附于基板保持器240的状态起,控制阀751使通气路径640与开放端771连通的情况下,解除基板保持器240对基板230的吸附。在图5的(B)的示意性剖视图中,示出基板保持器240吸附了基板230的状态,吸附于基板保持器240的基板230位于上述的平面且处于平坦的状态。
此外,说明了图4和图5分别所示的基板保持器220、240都是主体部229、249的剖面形状为大致方形的情况,但也可以取而代之,具有从周缘部朝向中央部而厚度逐渐增加的剖面形状。由此,吸附并保持于基板保持器220、240的基板210、230与保持面221、241紧贴,整体模仿保持面221、241的形状而弯曲。因此,在保持面221、241的表面为曲面、例如形成圆筒面、球面、拋物面等的情况下,所吸附的基板210、230整体的形状也变化为形成这样的曲面。
如图6所示,将单独地保持基板210、230的基板保持器220、240依次搬入至贴合部300并固定于各工作台(步骤S105)。在这之后的说明中适当地参照的图6至图9和图11是贴合部300的示意性剖视图。这里,贴合部300具备框体310、上工作台322和下工作台332。
上工作台322向下固定于框体310的顶板316。上工作台322具有真空卡盘、静电卡盘等的保持功能。在图示的状态下,在上工作台322已经保持有保持了基板210的基板保持器220。上工作台322具有与所保持的基板保持器220的4个观察孔601、602、603、604的各位置对应地设置的4个观察窗361、362、363、364。观察窗361等分别由相对于在观察基板210的情况下使用的照明光的波长为透明的材料来填充,上工作台322的下表面也包含形成了观察窗361等的区域,形成平坦的面。
贴合部300还具备在与上工作台322的4个观察窗361等对应的位置在厚度方向上贯通框体310的顶板316而设置的4个检测器341、342、343、344。4个检测器341等形成观察部345,该观察部345通过与上工作台322的下表面光学性连通的4个观察窗361等和基板保持器220的4个观察孔601等,观察在贴合部300内基板210、230之间的贴合区域的扩大。观察部345是判断为初始贴合区域贴合的判断部的一例。
4个检测器341等例如能够使用受光部和光源而形成。在该情况下,若在上工作台322保持有保持了基板210的基板保持器220,则能够通过4个观察窗361等和4个观察孔601等,利用4个检测器341等来检测基于基板210、230等的反射光的光强度。
贴合部300的下工作台332搭载于与在框体310的底板312配设的X方向驱动部331重叠的Y方向驱动部333的图中上表面。下工作台332也具有真空卡盘、静电卡盘等的保持功能。在图示的状态下,在下工作台332已经保持有保持了基板230的基板保持器240。
在顶板316,将显微镜324和活化装置326固定于上工作台322的侧方。显微镜324能够观察由下工作台332间接地保持的基板210的上表面。活化装置326产生净化由下工作台332间接地保持的基板210的上表面的等离子体。
X方向驱动部331与底板312平行地在图中箭头X所示的方向上移动。Y方向驱动部333在X方向驱动部331上与底板312平行地在图中箭头Y所示的方向上移动。通过使X方向驱动部331和Y方向驱动部333的动作组合,从而下工作台332与底板312平行地二维移动。
另外,下工作台332由与底板312垂直地在箭头Z所示的方向上升降的升降驱动部338支承。由此,下工作台332能够相对于Y方向驱动部333升降。这样,下工作台332在与保持有保持了基板210的基板保持器220的上工作台322之间,使由基板保持器220保持的基板210与由基板保持器240保持的基板230的相对位置位移。
由X方向驱动部331、Y方向驱动部333和升降驱动部338使下工作台332移动的移动量是使用干扰计等而精密地计测的。
在Y方向驱动部333,将显微镜334和活化装置336分别搭载于下工作台332的侧方。显微镜334能够观察由上工作台322间接地保持的向下的基板230的下表面。活化装置336产生净化由上工作台322间接地保持的基板230的下表面的等离子体。另外,也可以将该活化装置326和336设置于与贴合部300不同的装置,通过机器人将上表面被活化的基板和基板保持器从活化装置326、336向贴合部300输送。
此外,贴合部300也可以进一步具备:旋转驱动部,其使下工作台332绕与底板312垂直的旋转轴旋转;以及摆动驱动部,其使下工作台332摆动。由此,使下工作台332与上工作台322平行,并且使由下工作台332间接地保持的基板210旋转,能够提高基板210、230的对位精度。
显微镜324、334通过相互对焦或者观察共用的指标而由控制部150较正。由此,测定贴合部300中的一对显微镜324、334的相对位置。
紧接着图6所示的状态,如图7所示,控制部150使X方向驱动部331和Y方向驱动部333进行动作,由显微镜324、334检测分别设置于基板210、230的对准标记218、238(步骤S106)。
接下来,利用相对位置已知的显微镜324、334对基板210、230的对准标记218、238的位置进行检测,由此计算基板210、230的相对位置(步骤S107)。由此,在对基板210、230进行对位的情况下,以一对基板210、230中对应的对准标记218、238之间的位置偏移量为预先决定的阈值以下的方式、或者以在基板210、230之间对应的电路区域216、236或者连接部的位置偏移量为预先决定的阈值以下的方式计算基板210、230的相对移动量即可。位置偏移是指层叠的基板210、230之间的对应的对准标记218、238彼此的位置偏移、以及对应的连接部彼此的位置偏移,包含因在二个基板210、230分别产生的形变量之差所引起的位置偏移。
这里,所谓的针对上述的位置偏移量的阈值,也可以是在基板210、230的相互的贴合完成时,在基板210、230之间能够电导通的偏移量,也可以是分别设置于基板210、230的构造物彼此以至少一部分接触时的偏移量。在基板210、230之间的位置偏移为阈值以上的情况下,控制部150也可以判断为是连接部彼此不接触或者无法得到适当的电导通的状态、或是在接合部之间无法得到规定的接合强度的状态。另外,在贴合前预先处理基板210、230在贴合过程中产生的形变的情况下,即在使基板210、230的至少一方在贴合前变形以在完成贴合时修正由该形变所引起的位置偏移的情况下,也可以将一个基板变形的状态下的位置作为基准来设定阈值。
紧接着图7所示的状态,如图8所示,控制部150记录一对基板210、230的相对位置,并化学性地活化一对基板210、230各自的贴合面(步骤S108)。首先,控制部150使下工作台332的位置复位到初始位置之后使其水平移动,并通过活化装置326、336生成的等离子体对基板210、230的表面进行扫描。由此,基板210、230各自的表面被净化,化学性的活性提高。此外,步骤S108中的基板210、230的活化也可以在步骤S106之前进行。另外,基板210、230的活化也可以在将基板210、230搬入基板贴合装置100之前进行。另外,关于基板210、230的活化,也可以在将基板210、230暂时搬出到基板贴合装置100的外部,在外部进行活化后,再次搬入基板贴合装置100。
除了暴露于等离子体的方法之外,也能够通过使用了惰性气体的溅射蚀刻、离子束或者高速原子束等活化基板210、230的表面。在使用离子束、高速原子束的情况下,能够在减压下生成贴合部300。此外,也能够通过紫外线照射、臭氧灰化机等活化基板210、230。而且,例如也可以通过使用液体或者气体的蚀刻剂化学性地净化基板210、230的表面来活化。也可以在基板210、230的表面的活化后,通过亲水化装置使基板210、230的表面亲水化。
紧接着图8所示的状态,如图9所示,控制部150将基板210、230相互对位(图3的步骤S109)。首先,控制部150基于最初检测出的显微镜324、334的相对位置和在步骤S106中检测出的基板210、230的对准标记218、238的位置,使下工作台332移动,以使基板210、230的相互对应的构造物的位置偏移量至少在完成贴合时为阈值以下。
图10是表示贴合过程中的基板210、230的状态的示意性剖视图。图10表示图9所示的步骤S109的状态下的基板210、230的状态。像图示那样,分别经由基板保持器220、240而保持于上工作台322和下工作台332的基板210、230在相互对位的状态下对置。如图所示,在由基板保持器220吸附的平坦的基板210的中央附近的区域C形成有急剧地突出的隆起部215,因此关于对置的基板210、230的间隔,基板210、230的中央附近的间隔比周缘部的间隔小。
紧接着图9和图10所示的状态,如图11所示,控制部150使升降驱动部338进行动作而使下工作台332上升,使基板210、230相互接近。而且,基板210、230的一部分相互接触,而形成接触区域即贴合区域(步骤S110)。具体而言,基板210的隆起部215和与隆起部215对置的基板230的一部分的区域相互接触,在已经活化的接触部位形成贴合区域。
图12是表示贴合过程中的基板210、230的状态的示意性剖视图。图12示意性地以剖面表示在图11所示的步骤S110的状态下的基板210、230的状态。在该阶段,控制部150控制控制阀724、727、751,使基板保持器220的内周通气路径621和最外周通气路径622和基板保持器240的通气路径640分别与负压源734、737、761连通。因此,基板210、230分别吸附于基板保持器220、240,抑制基板210、230在上述的接触部位以外的部分接触。这样,通过使用具有突出部件250的基板保持器220,在基板210、230仅形成一个接触部位,其结果为,能够抑制因单独形成多个接触部位而引起的贴合面内的空隙的产生。
图13是表示贴合过程中的基板210、230的状态的示意性俯视图。具体而言,示意性地从基板210的背面侧俯视表示图11和12所示的步骤S110的状态下的基板210、230的状态。在基板210、230之间,在其面方向中央附近形成有贴合区域801。因此,基板210、230的贴合区域801从中央附近朝向基板210、230的径向外侧扩大。
在图13中,表示由控制部150预先设定的、与基板210、230大致同心圆状的圆形的初始贴合区域803。在本实施方式中,成为如下的结构:控制部150预先决定半径不同的3个同心圆状的初始贴合区域803,基于与解除侧的基板210的局部弯曲相关的信息中包含的基板210的局部弯曲的特性,从该3个初始贴合区域803中选择一个初始贴合区域803。伴随着这样的结构,与3个初始贴合区域803对应地,在基板保持器220预先设置有3个观察孔601、602、603,在贴合部300的上工作台322设置有3个观察窗361至363。在控制部150基于解除侧的基板210的局部弯曲的特性而选择一个初始贴合区域803的情况下,使用对应的观察孔、观察窗和检测器。在图13中,表示对应的观察孔602位于所选择的初始贴合区域803的周缘的情形。
图14是表示贴合过程中的基板210、230的状态的示意性剖视图。紧接着图12和图13所示的状态,如图14所示,控制部150在上工作台322切换控制阀724,使基板保持器220的内周通气路径621与开放端744连通。由此,图中上侧的基板210的内周区域解除基于基板保持器220的保持(步骤S111),通过活化的表面相互的分子间力等,基板210、230相互自主地贴合。在该期间,基板保持器220的最外周通气路径622仍维持与负压源737连通的状态。由此,图中上侧的基板210的最外周区域继续维持由基板保持器220进行保持。
由于基板210、230的表面被活化,因此若一部分接触,则通过基板210、230彼此的分子间力,而相邻的区域自主地相互吸附而贴合。因此,例如,解除由上工作台322保持的基板保持器240对基板230的保持,由此基板210、230的贴合的区域从接触的部分向相邻的区域依次扩大。由此,产生贴合的区域依次扩大的接合波,基板210、230的贴合行进。
在执行步骤S111后,控制部150判断初始贴合区域803是否已贴合(步骤S112)。图15和16是对检测器342的动作进行说明的示意性剖视图。图15是在执行步骤S111后,在对从3个初始贴合区域803中选择的一个初始贴合区域803使用的检测器342的检测范围,局部扩大地表示基板210、230接触之前的状态的图。图15所示的区域与图14中虚线B所示的区域对应。
在图示的状态下,在基板210、230相互之间残留有间隙G2。间隙G2是通过贴合部300内部的环境气体等夹于基板210、230而形成的。由基板210、230夹着的环境气体等由于通过基板210、230彼此的分子间力使相邻的区域自主地相互吸附并依次贴合而被挤出,最终基板210、230相互紧贴而贴合,但由于解除侧的基板210的局部弯曲的特性、夹着的环境气体的密度等,直到基板210、230贴合为止所需要的时间能够在基板210、230的周向上不同。当然,该时间能够按照每个基板210、230、基板210、230的每个种类、每个制造工序、或者每个制造批次而不同。
在贴合部300中,即使是基板210、230由上工作台322和下工作台332夹着的状态,基板210的初始贴合区域803的周缘的区域也通过观察孔602和观察窗362而与检测器342光学性连通。在图示的例子中,检测器342具有光源351和受光部352。
光源351产生至少一部分透过基板210的波长的照射光。光源351产生的照射光通过观察窗362和观察孔602而朝向基板210照射。受光部352具有光电二极管等光电变换元件,接受由基板210、230等反射的照射光,产生与反射光强度对应的电信号。将受光部352产生的电信号输入控制部150。
如图中单点划线所示,在上工作台322和下工作台332之间,在折弯率不同的介质的边界形成反射面。在图示的例子中,在观察孔602与间隙G1的边界、间隙G1与基板210的边界、基板210与间隙G2的边界、间隙G2与基板230的边界、基板230与间隙G3的边界、间隙G3与基板保持器240的边界分别形成反射面O、P、Q、R、S、T。因此,通过观察窗362和观察孔602而从检测器341的光源351照射的照射光在反射面O、P、Q、R、S、T中的各个反射面反射,再次通过观察孔602和观察窗362而入射到受光部352,由此检测反射光的强度。
图16是在与图15相同的视点下,在执行步骤S111后,局部放大地表示基板210的初始贴合区域803贴合的状态的图。若基板210、230贴合而相互紧贴,则在基板210、230与间隙G2之间形成的一对反射面R、Q消失。因此,对检测器342的照射光进行反射的反射面的数量减少,检测器342检测的反射光强度降低。因此,控制部150能够基于从检测器342输出的检测信息,来判断为基板210的初始贴合区域803贴合。此外,在间隙G2消失之前的间隙G2的减少过程中,检测器342检测的反射光强度有变化,但是并不是反射光强度随着间隙G2的减少而减少,而是由于在照射光与反射光之间产生干扰而重复反射光的明暗。
图17是表示贴合过程中的基板210、230的状态的示意性俯视图。具体而言,示意性地从基板210的背面侧俯视表示图16所示的基板210、230的状态。示出了图13所示的基板210、230的贴合区域801从基板210、230的中央附近朝向径向外侧扩大,但贴合区域801的扩大的行进程度在基板210、230的周向上不规则。
在执行步骤S111后,控制部150在基于从检测器342输出的检测信息而判断为基板210的初始贴合区域803未贴合的情况下(步骤S112:否),继续接收来自检测器342的检测信息而继续进行判断,在判断为基板210的初始贴合区域803贴合的情况下(步骤S112:是),在上工作台322切换控制阀727,而使基板保持器220的最外周通气路径622与开放端747连通。由此,图中上侧的基板210的最外周区域也解除基于基板保持器220的保持(步骤S113),通过活化后的表面相互的分子间力等而相互自主地贴合直至基板210、230的周缘。
即,在图示的例子中,在从通过切换控制阀724而使基板保持器220的内周通气路径621与开放端744连通而产生基板210的接合波起、直到借助由基板保持器220保持基板210的最外周区域而在基板210产生的吊起力而使接合波停止为止的期间,在判断为初始贴合区域803贴合时或者之后,使最外周通气路径622与开放端747连通,由此从基板保持器220释放基板210的最外周区域。
此外,在图15和图16中,以在图中容易区别照射光和反射光为目的,而记载为与基板210、230倾斜地照射照射光。然而,即使对基板210、230垂直地照射照射光,也能够通过使用半反射镜等光学器件,形成检测反射光强度的光学系统。另外,检测器342也可以使用CCD、CMOS传感器等影像传感器来取代受光部352。另外,检测器342的上述构造也能够应用于图6等所示的其他检测器341、343、344。
图18是表示贴合过程中的基板210、230的状态的示意性剖视图。在执行步骤S113后,控制部150在基于从位于基板210的周缘的检测器344输出的检测信息而判断为基板210、230的贴合未完成的情况下(步骤S114:否),继续接收来自检测器344的检测信息而继续进行判断,在判断为基板210、230的贴合完成的情况下(步骤S114:是)、即如图18所示,在基板210、230的贴合面内的接合波的行进完成的情况下,在规定时间后,通过输送部140将由基板210、230形成的层叠基板290与基板保持器240一同从贴合部300搬出(步骤S115)。然后,在预对准器500中将层叠基板290和基板保持器240分离,通过输送部140将层叠基板290输送到基板盒130。此外,也可以在贴合部300中将层叠基板290和基板保持器240分离,通过输送部140将层叠基板290单体从贴合部300搬出,并输送到基板盒130。
接下来,对初始贴合区域803的设定方法进行说明。特别是,对基于局部弯曲的特性设定初始贴合区域803的例子进行说明。这里,若在贴合前的解除侧的基板210产生局部弯曲,则成为在贴合时产生非线性形变的一个重要因素。在该情况下,即使在贴合部300中,基于对准标记218、238等进行了基板210、230的面方向上的对位的情况下,也有时无法消除基板210、230间的位置偏移。因此,在图3所示的步骤S101和步骤S102中,控制部150获取与解除侧的基板210的局部弯曲相关的信息,基于所获取的信息中包含的基板210的局部弯曲的特性,来预先设定解除侧的基板210的初始贴合区域803。而且,如图14至18所示,控制部150维持基板保持器220对基板210的最外周区域的保持,直到检测出通过贴合区域801从基板210、230的中央附近朝向外周扩大而预先设定的初始贴合区域803贴合为止。
这里,基板210、230中产生的形变是指基板210、230各自的构造物的从设计坐标即设计位置起的位移。基板210、230中产生的形变包含平面形变和立体形变。
平面形变是基板210、230在沿着贴合面的方向上产生的形变,包含基板210、230各自的构造物相对于设计位置位移后的位置由线性变换表示的线性形变、以及无法由线性变换表示的线性形变以外的非线性形变。
线性形变包含位移量从中心沿着径向以一定的增加率增加的倍率形变。倍率形变是通过将与基板210、230的中心相距距离X处的从设计值的偏移量除以X而得到的值,单位为ppm。倍率形变包含各向同性倍率形变。各向同性倍率形变是从设计位置起的位移矢量具有的X成分和Y成分相等、即X方向的倍率与Y方向的倍率相等的形变。另一方面,从设计位置起的位移矢量具有的X成分和Y成分不同、即X方向的倍率与Y方向的倍率不同的形变即非各向同性倍率形变包含于非线性形变。
在本实施方式中,以二个基板210、230各自的构造物中的、至少电路区域216、236的设计位置为基准的倍率形变之差包含于二个基板210、230之间的位置偏移量。此外,也可以考虑因由贴合产生的倍率形变之差所引起的位置偏移量,而将贴合的二个基板210、230各自的电路区域216、236的设计位置设计成不同。
另外,线性形变包含正交形变。正交形变是在将基板的中心作为原点而设定相互正交的X轴和Y轴时,构造物越沿Y轴方向远离原点则为越大的量,且从设计位置起与X轴方向平行地位移的形变。该位移量在与X轴平行地横切Y轴的多个区域中的各个区域中相等,位移量的绝对值随着远离X轴而变大。而且,正交形变在Y轴正侧的位移的方向和Y轴负侧的位移的方向上相互相反。
基板210、230的立体形变是基板210、230在沿着贴合面的方向以外的方向、即与贴合面交叉的方向上的位移。立体形变包含由于基板210、230整体或者局部弯折而在基板210、230的整体或者一部分产生的弯曲。这里,“基板弯折”是指基板210、230变化成使在由该基板210、230上的3点确定的平面上不存在的点由基板210、230的表面包含的形状。
另外,弯曲是指基板的表面形成曲面的形变,例如包含基板210、230的翘曲。在本实施方式中,翘曲是指在排除了重力的影响的状态下残留于基板210、230的形变。将对翘曲赋予了重力的影响后的基板210、230的形变称为挠曲。此外,基板210、230的翘曲包含:基板210、230整体以大体一样的曲率曲折的总体翘曲;以及在基板210、230的一部分,局部的曲率变化而曲折的局部翘曲。
这里,倍率形变根据产生原因而分类成初始倍率形变、吸附倍率形变和贴合过程倍率形变。
由于在将对准标记218、电路区域216等形成于基板210、230的工序中产生的应力、由刻线212、电路区域216等的配置所引起的周期性的刚性的变化等,作为针对基板210、230的设计规格的背离,从将基板210、230贴合前的阶段产生初始倍率形变。因此,能够在开始基板210、230的层叠之前知道基板210、230的初始倍率形变,例如,控制部150也可以从制造基板210、230的前处理装置获取与初始倍率形变相关的信息。
吸附倍率形变是由于产生了翘曲等形变的基板210、230贴合、或者吸附于平坦的保持部件而在基板210、230中产生的形变。若使产生了翘曲的基板210、230吸附并保持于平坦的基板保持器220、240、下工作台332,则基板210、230模仿平坦的基板保持器220、240、下工作台332的保持面的形状而变形。这里,若基板210、230从具有翘曲的状态变化为模仿基板保持器220、240、下工作台332的保持面的形状的状态,则与保持前相比,基板210、230的形变量发生变化。
由此,基板210、230的表面上的电路区域216相对于设计规格的形变量与保持之前相比发生变化。基板210、230的形变量的变化根据形成于基板210、230的电路区域216等构造物的构造、用于形成该构造物的工序、保持前的基板210、230的翘曲的大小等而不同。在基板210、230产生翘曲等形变的情况下,能够通过预先调查该形变与吸附倍率形变的相关性,根据包含基板210、230的翘曲量和翘曲形状等的形变的状态来计算吸附倍率形变的大小。
贴合过程倍率形变是由于在贴合的过程中在基板210、230中产生的形变所引起的新产生的倍率形变的变化。图19、图20和图21是表示具有平坦的保持面的固定侧用的基板保持器240上的基板210、230的贴合过程的局部放大图。在图19、图20和图21中,放大地表示在利用贴合部300贴合的过程中的基板210、230中的基板210、230相互接触的接触区域与基板210、230相互不接触而分离且之后贴合的非接触区域之间的边界K附近的区域Q。
如图19所示,在相互局部接触的基板210、230的接触区域从中央朝向外周扩大面积的过程中,边界K从基板210、230的中央侧朝向外周侧移动。在边界K附近,在解除基于基板保持器220的保持的基板210中,由于与基板230之间夹有的环境气体、更具体而言例如由于赶出与基板230之间夹有的空气时的空气阻力而产生拉伸。更具体而言,在边界K,相对于基板210的厚度方向的中央面,在基板210的图中下表面侧,基板210拉伸,在图中上表面侧,基板210收缩。
由此,如图中虚线所示,在基板210中,在与基板230贴合的区域的外端,以基板210的表面上的电路区域216相对于设计规格的位置偏移是否相对于基板230扩大的方式形变。因此,如图中表现为虚线的偏移所示那样,在由基板保持器240保持的下侧的基板230与解除基于基板保持器220的保持的上侧的基板210之间,产生因基板210的拉伸量即倍率形变的差异所引起的位置偏移。
而且,如图20所示,若在上述的状态下基板210、230相互接触而贴合,则基板210的扩大的倍率形变被固定。而且,如图21所示,通过贴合而固定的基板210的拉伸量随着边界K越向基板210、230的外周移动而越累积。
上述的贴合过程倍率形变的量能够基于贴合的基板210、230的刚性、由基板210、230夹着的环境气体的粘性等物理量来计算。另外,也可以预先测定并记录将与贴合的基板210、230相同的批次制造的基板贴合而产生的偏移量,将所记录的测定值作为与在该批次的基板210、230的贴合中产生的贴合过程倍率形变相关的信息而由控制部150获取。此外,在本实施方式中,贴合过程包含从基板210和基板230相互一部分接触直到接触区域的扩大结束为止的过程。
图22是表示因使用图19至图21所说明的贴合方法而产生的倍率形变造成在层叠基板290上的位置偏移的示意图。图中的箭头是表示将解除侧的基板210作为基准时的固定侧的基板230的位置偏移的矢量,通过其方向表示位置偏移的方向,通过其长度表示位置偏移的大小。图示的偏移具有从层叠基板290的中心点向面方向呈放射状渐增的偏移量。此外,图示的倍率形变包含:在将基板210、230贴合前产生的初始倍率形变和吸附倍率形变、以及在将基板210、230贴合的过程中产生的贴合过程倍率形变。
此外,在通过使用图19至图21所说明的贴合方法将基板210、230贴合的情况下,在维持基板保持器240对基板230的保持的状态下解除基板保持器220对基板210的保持。因此,在将基板210、230贴合的时刻,相对于所保持的基板230的形状被固定,解除了保持的基板210一边形变一边贴合。因此,关于在固定的状态下贴合的基板230,也可以不考虑贴合过程倍率形变,但关于解除保持的基板210,优选考虑贴合过程倍率形变。
在固定侧的基板230在由于基板保持器240的形状等而形变的状态下被保持的情况下,对于解除了保持的基板210,优选考虑贴合过程倍率形变和吸附倍率形变双方,进一步优选还考虑由于基板210模仿形变的基板230的形状而产生的吸附倍率形变那样的形变。
这样,在使用图19至图21所说明的贴合方法中,基板210、230贴合后的最终的倍率形变之差是通过在基板210、230最初具有的初始倍率形变之差上,重叠在使基板210、230保持于基板保持器220、240等的情况下产生的吸附倍率形变之差、和在贴合的过程中解除保持的基板210的贴合过程倍率形变而形成的。
如上述那样,在利用使用图19至图21所说明的方法将基板210、230层叠而形成的层叠基板290中产生的位置偏移与初始倍率形变之差、吸附倍率形变之差、以及贴合过程倍率形变之差的大小相关。另外,在基板210、230中产生的倍率形变与翘曲等基板的形变相关。
而且,这些初始倍率形变之差、吸附倍率形变之差、以及贴合过程倍率形变之差如上述那样,能够通过贴合前的测定、计算等来推断。因此,能够预先采取用于基于对于贴合的基板210、230推断的贴合后的最终的倍率形变之差来修正该差的对策。
作为对策的一例,考虑从固定侧用的多个基板保持器240选择其保持面的曲率能够修正最终的倍率形变之差的基板保持器。图23是表示使用具有弯曲的保持面的固定侧用的基板保持器240来修正空气阻力所引起的倍率形变的情况下的、基板保持器240上的基板210、230的贴合过程的局部放大图。
如图23所示,固定侧用的基板保持器240的保持面241弯曲。在将基板230吸附于这样的形状的保持面241的情况下,在基板230弯曲的状态下,与图中单点划线所示的基板230的厚度方向的中心部A进行比较,在基板230的图中上表面即表面,基板230的表面的形状变化为从中心朝向周缘部在面方向上扩大。另外,在基板230的图中的下表面即背面,基板230的表面的形状变化为从中心朝向周缘部在面方向上缩小。
这样,通过使基板230保持于基板保持器240,从而基板230的图中上侧的表面与基板230平坦的状态比较而扩大。通过这样的形状的变化,能够修正与其他基板210的最终的倍率形变之差、即因该差所引起的位置偏移。而且,准备弯曲的保持面241的曲率不同的多个基板保持器240,通过选择具有因最终的倍率形变之差所引起的位置偏移量为预先决定的阈值以下的曲率的保持面241的基板保持器240,能够调节该修正量。
在图23的实施方式中,基板保持器240的保持面241具有在中央隆起的形状。也可以取而代之,通过准备相对于保持面241的周缘部而中央部凹陷的基板保持器240来保持基板230,从而使基板230的贴合面的倍率缩小,调整形成于贴合面的电路区域236相对于设计规格的位置偏移。
以上,参照图19至22,对在贴合的基板210、230中产生的平面形变所包含的线性形变中的的倍率形变、特别是贴合过程倍率形变进行了说明。另外,参照图23,说明了用于基于对于贴合的基板210、230推断出的贴合后的最终的倍率形变之差来修正该差的对策的一例。作为该对策的另一例,也可以通过致动器使贴合部300的下工作台332的保持面变形。
接下来,对在贴合的基板210、230中产生的平面形变所包含的非线性形变中的、因基板210、230的结晶取向所引起的各向异性即结晶各向异性所引起的形变进行说明。
图24是表示硅单晶基板208中的结晶方位与杨氏模量的关系的模式。如图24所示,在将(100)面作为表面的硅单晶基板208中,在将相对于中心而与缺口214的方向相反的方向设为0°的X-Y坐标中,在0°方向和90°方向中杨氏模量高达169GPa,在45°方向中杨氏模量低至130GPa。因此,在使用硅单晶基板208制成的基板210、230中,在基板210、230的周向上产生抗弯刚性不均匀的分布。即,根据接合波从基板210、230的中心朝向周缘部行进时的行进方向,基板210、230的抗弯刚性不同。抗弯刚性表示相对于弯折基板210、230的力的变形的容易度,也可以作为弹性模量。
图25是表示硅单晶基板209中的结晶方位与杨氏模量的关系的模式。如图25所示,在将(110)面作为表面的硅单晶基板209中,在将相对于中心而与缺口214的方向相反的方向设为0°的X-Y坐标中,35.3°方向的杨氏模量最高而为188GPa,0°方向的杨氏模量其次而为169GPa。而且,90°方向上的杨氏模量最低而为130GPa。因此,在使用硅单晶基板209制成的基板210、230中,在基板210、230的周向上产生抗弯刚性不均匀且复杂的分布。
这样,在使用了结晶各向异性各不同的硅单晶基板208、209中的任一方的基板210、230中,在其周向上产生抗弯刚性的不均匀的分布。在抗弯刚性不同的区域间,根据其抗弯刚性的大小,在参照图19至图21所说明的贴合过程中产生的形变的大小不同。具体而言,刚性较低的区域的形变的大小与刚性较高的区域相比较小。因此,在利用使用图19至图21所说明的方法将基板210、230层叠而制造的层叠基板290中,在层叠基板290的周向上产生不均匀的电路区域216、236的位置偏移。因结晶各向异性所引起的形变导致的贴合基板间的位置偏移是因解除侧的基板230的结晶各向异性所引起的。
图26是表示在表面形成有以在贴合时会产生的空气阻力所引起的倍率形变以及结晶各向异性所引起的形变导致的层叠基板290上的位置偏移量为预先决定的阈值以下的方式预先修正了配置的多个电路区域216、236的基板610、630的示意图。基板610是贴合部300中的解除侧的基板,基板610、630由使用图24所说明的硅单晶基板208形成。
在图23的实施方式中,作为预先修正因空气阻力所引起的倍率形变的方法,作为固定侧用的基板保持器240,选择保持面241弯曲的基板保持器。然而,基板保持器220、240或者上工作台322、下工作台332的加工、操作等更容易的结构是它们的保持面平坦的结构。因此,在本实施方式中,取代由保持面241弯曲的固定侧用的基板保持器240进行修正的方法,而通过预先修正在解除侧的基板610的表面形成的多个电路区域216的配置来进行形成,由此使贴合时会产生的空气阻力所引起的倍率形变以及结晶各向异性所引起的形变导致的层叠基板290上的位置偏移量为预先决定的阈值以下。
关于固定侧的基板630,由于在贴合时维持固定的状态,因此预测为不产生空气阻力所引起的倍率形变以及结晶各向异性所引起的形变。因此,在基板630中,使用相同的掩模反复曝光而在基板630整体形成多个电路区域236的情况下,不修正曝光区域图(ShotMap),而在基板630的整体上等间隔地形成多个电路区域236。
另一方面,关于解除侧的基板610,在贴合时被释放而预测为产生空气阻力所引起的倍率形变以及结晶各向异性所引起的形变。因此,在基板610中,使用相同的掩模反复曝光而在基板610整体形成多个电路区域216的情况下,修正曝光区域图以使得空气阻力所引起的倍率形变以及结晶各向异性所引起的形变导致的位置偏移量为预先决定的阈值以下,从基板610的中心朝向周缘部,使多个电路区域216的间隔在整体范围内逐渐变窄,并且使0°方向和90°方向的间隔比45°方向的间隔窄。由此,即使固定侧用的基板保持器240的保持面241平坦,也能够将在贴合时会产生的空气阻力所引起的倍率形变以及结晶各向异性所引起的形变导致的在层叠基板290上的位置偏移抑制在预先决定的阈值以下。
接下来,对在贴合的基板210、230中产生的平面形变所包含的非线性形变进行说明。图27是表示相对于在平坦的状态下固定于基板保持器240的基板230,解除侧的基板210不具有总体翘曲而具有局部弯曲的情况下产生的非线性形变所引起的层叠基板290上的位置偏移的示意图。图27所示的非线性形变所引起的位置偏移不包含图22所示的倍率形变所引起的位置偏移。此外,关于图27所示的、基板210中的非线性形变所引起的位置偏移,有时根据保持基板210的基板保持器220的突出部件250的突出量而表示不同的结果。
图中的箭头是表示将解除侧的基板210作为基准时的固定侧的基板230的位置偏移的矢量,通过其方向表示位置偏移的方向,通过其长度表示位置偏移的大小。如图27所示,关于层叠基板290中的由于局部弯曲而产生的非线性形变所引起的位置偏移,在X为正且Y为正的第一象限即45°方向和X为负且Y为负的第三象限即225°方向上表示相同的趋势,在X为正且Y为负的第二象限即315°方向和X为正且Y为负的第二象限即135°方向上表示相同的趋势,在第一象限及第三象限、与第二象限及第四象限中表示不同的趋势。另外,从层叠基板290的中心沿着径向的位置偏移量没有规则的分布。参照图27,可知非线性形变所引起的位置偏移是指无法通过线性变换来表示基板210、230各自的构造物相对于设计位置位移后的位置。
非线性形变是由于多种多样的重要因素彼此相互影响而产生的,但其主要的重要因素是参照图24和图25所说明的硅单晶基板208、209中的结晶各向异性、以及基板210、230的制造工序。关于图27所示的层叠基板290上的位置偏移,在产生因结晶各向异性所引起的非线性形变的状态下,也是因局部翘曲所引起的非线性重叠的结果。像参照图2说明的那样,在基板210、230的制造工序中,在基板210、230形成有多个构造物。例如,作为构造物,在基板210、230形成有多个电路区域216、236、刻线212、232、以及多个对准标记218、238。在多个电路区域216、236中的各个电路区域,作为构造物,除了通过光刻技术等形成的布线、保护膜等之外,还配设有在将基板210、230与其他基板230、210、引线框架等电连接的情况下成为连接端子的焊垫、凸块等连接部。这些构造物的构造、配置、即构造物的结构对基板210、230的面内的刚性分布、内表面应力分布造成影响,若刚性分布、内表面应力分布产生不均,则在基板210、230产生局部弯曲。
这些构造物的结构也可以按照每个基板210、230而不同,也可以按照逻辑晶片、CIS晶片、存储晶片等基板210、230的每个种类而不同。另外,即使制造工序相同,也考虑构造物的结构依据制造装置而稍微不同,因此这些构造物的结构也可以按照基板210、230的每个制造批次而不同。这样,形成于基板210、230的多个构造物的结构能够按照每个基板210、230、按照基板210、230的每个种类、按照基板210、230的每个制造批次、或者按照基板210、230的每个制造工序而不同。因此,基板210、230的面内的刚性分布也同样是不同的。因此,在制造工序和贴合过程中产生的基板210、230的弯曲状态也同样是不同的。
若在将一对基板210、230贴合时,在解除侧的基板210中产生局部弯曲,则在基板210中产生局部弯曲的部位与未产生局部弯曲的部位相比,有时在与其他基板230贴合时与基板230之间的距离变大。例如,在解除侧的基板210中有时产生贴合面拉伸这样的翘曲。因此,在产生局部弯曲的部位,与未产生局部弯曲的部位相比,接合波的行进较慢,在解除侧的基板210中的产生局部弯曲的部位产生褶皱集中,出于这个原因而在贴合的层叠基板290中产生非线性形变。即,在局部弯曲与非线性形变之间存在相关性,在贴合前的解除侧的基板210的局部弯曲变大的部位,在贴合后的层叠基板290中产生的非线性形变也变大。但是,该因果关系适用于没有因局部弯曲所引起的形变以外的形变的情况。另一方面,即使是在贴合的基板210、230具有局部弯曲的情况,也有时由局部弯曲而产生的非线性形变例如被因结晶各向异性所引起的形变抵消。
在一对基板210、230中的固定侧的基板230中,在贴合前产生局部弯曲的情况下,维持该贴合面的背侧的整面由基板保持器240等吸附而固定的状态,因此不产生因自身的局部弯曲所引起的非线性形变,在贴合后的基板210、230之间也不会产生因固定侧的基板230的局部弯曲所引起的非线性的位置偏移。但是,在固定侧的基板230可能产生吸附倍率形变等,但这样的形变与在解除侧的基板210中产生的形变相比较小,由于其影响几乎没有,因此也可以忽略。另一方面,在解除侧的基板210中在贴合前产生局部弯曲的情况下,出于上述的理由,在贴合的一对基板210、230之间产生因非线性形变所引起的位置偏移。
为了抑制这样的因非线性形变所引起的位置偏移,控制部150在基板210、230的贴合前至少获取与解除侧的基板210的局部弯曲相关的信息,基于所获取的信息中包含的基板210的局部弯曲的特性来预先设定解除侧的基板210的初始贴合区域803,维持基板保持器220保持基板210的至少最外周区域,直到通过贴合区域801从基板210、230的中央附近朝向外周扩大而检测出预先设定的初始贴合区域803贴合为止。
例如像本实施方式那样,在假定为基板210中的局部弯曲至少局部地从基板210的中心侧向外周侧沿着径向渐增的情况下,在直到基板210的预先设定的初始贴合区域803贴合为止的期间,维持基板210的最外周区域中的产生局部弯曲的部位以及未产生局部弯曲的部位都由基板保持器220保持的状态。由此,在基板210的最外周区域的整体范围内,使与贴合的其他基板230之间的距离在规定的范围内为恒定。
在直到预先设定的初始贴合区域803贴合为止的期间,强制性地在基板210的最外周区域的整体范围内形成相同大小的翘曲,因此能够在基板210的产生局部弯曲的部位与未产生局部弯曲的部位之间抑制接合波的行进程度之差。
在初始贴合区域803与产生局部弯曲的部位重叠的区域,能够抑制接合波的行进程度之差,因此重叠的程度越大,则抑制在贴合的基板210、230之间产生的非线性的位置偏移的效果越大。因此,控制部150预先设定解除侧的基板210的初始贴合区域803,以使在贴合后的基板210、230之间产生的非线性的位置偏移量为预先决定的阈值以下。
像上述那样,与基板210的局部弯曲相关的信息包含于与在基板210中产生的形变相关的信息。在与在基板210中产生的形变相关的信息中包含:与基板210整体以大体一样的曲率曲折的总体翘曲相关的信息;以及与在基板210的一部分产生局部曲率的变化、即局部弯曲的局部翘曲相关的信息。
在与总体翘曲相关的信息中包含:像基板210的整体翘曲的大小、翘曲的方向、挠曲的大小、挠曲的方向等整体的弯曲特性那样,通过对基板210的整体弯曲进行计测而得的信息;以及基板210的结晶各向异性、制造工序、基板210的种类、形成于基板210的构造物的结构这样的、与在基板210中产生整体弯曲的原因相关的信息。
在与局部翘曲相关的信息中包含:像基板210的局部翘曲的大小、翘曲的方向、翘曲的部分、翘曲的振幅、挠曲的大小、挠曲的方向、挠曲的振幅、挠曲的部分、内部应力、应力分布等局部弯曲的特性那样,通过对基板210的局部弯曲进行计测而得的信息;以及基板210的结晶各向异性、制造工序、基板210的种类、形成于基板210的构造物的结构这样的、与在基板210中产生局部弯曲的原因相关的信息。
控制部150也可以从在比基板贴合装置100之前进行的工序中使用的曝光装置、成膜装置等前处理装置获取与在基板210中产生的形变相关的信息。另外,在基板贴合装置100中,也可以从在比贴合部300之前进行的工序中使用的例如预对准器500获取。控制部150向输送部140、预对准器500和贴合部300中的至少任一方输出基于所获取的信息而决定的信息。
在本实施方式中,例如在前处理装置中,作为基板210、230的形变的一例,实际计测局部弯曲。图28是对挠曲计测和翘曲的计算方法进行说明的图。在图28的方法中,首先,对作为对象基板的基板210、230的挠曲进行计测。具体而言,一边在重力下,对基板210、230的背面的面方向的中心进行支承并使其绕中心旋转,一边通过显微镜等非接触距离计来观察基板210、230的表面或者背面,基于根据显微镜的光学系统具有的自动调焦功能所得到的距离信息的分布,对表面或者背面的位置进行计测。
由此,能够测定包含重力下的基板210、230的挠曲的大小和方向的挠曲量。基板210、230的挠曲量是根据将被支承的中心作为基准时的基板210、230的厚度方向的表面或者背面的位置的位移而求出的。接下来,控制部150获取基板210、230的挠曲量的信息,将其分解成从基板中心沿着径向的线性成分和非线性成分。在图28中,基板210、230的挠曲量的线性成分作为平均挠曲(A)而以抛物线状表示,非线性成分作为在外周的挠曲的振幅(B)而以波线状表示。
接下来,对作为基准基板的裸硅的挠曲进行计测。裸硅是未形成构造物的基板210、230,能够视为未产生翘曲的基板210、230。但是,在即使是裸硅也存在若干的翘曲的情况下,优选根据裸硅的表背的挠曲计测来计算成为基准的挠曲量。以与基板210、230相同的测定条件,测定裸硅的挠曲量。而且,控制部150获取裸硅的挠曲量的信息,将其分解成从裸硅中心沿着径向的线性成分(图28的(A))和非线性成分(图28的(B))。
而且,从在基板210、230的外周的挠曲的振幅减去在裸硅的外周的挠曲的振幅。由此,能够视为无重力下的计测值,能够计算基板210、230的翘曲量的非线性成分。在图28中,基板210、230的翘曲量的非线性成分作为在外周的翘曲的振幅(B)而以波线状表示,与上述的局部翘曲对应。此外,作为在无重力下计测的变形量的翘曲量能够以该方法计算的理由,是因为作为在重力下计测的变形量的挠曲量中包含的基于自重的变形量通过上述减去而实质地减去。
此外,能够通过从基板210、230的平均挠曲减去裸硅的平均挠曲,而计算能够视为在无重力下的计测值的基板210、230的翘曲量的线性成分,这与上述的总体翘曲对应。在图28中,基板210、230的翘曲量的线性成分作为平均翘曲(A)而以抛物线状表示。
最后,反映贴合时的解除侧的基板210的状况。具体而言,考虑解除侧的基板210的表面向下的姿势和重力方向而变换在基板210的外周的翘曲的振幅,由此将假定为对基板210的表面的面方向的中心进行支承并如上述那样计测的情况下的在基板210的外周的翘曲的振幅计算为预测值。
基于这样计算出的、作为与解除侧的基板210和固定侧的基板230的局部弯曲相关的信息的、在基板210、230各自的外周的翘曲的振幅中的、至少在解除侧的基板210的外周的翘曲的振幅,控制部150预先设定解除侧的基板210的初始贴合区域803。初始贴合区域803例如也可以基于在外周的翘曲的振幅的最大值或者平均值来预先设定,也可以基于基板210的贴合面内的翘曲的产生位置和翘曲的大小来预先设定。
像上述那样,基板210、230的局部弯曲能够按照每个基板210、230、按照基板210、230的每个种类、按照基板210、230的每个制造批次、或者按照基板210、230的每个制造工序而不同。因此,控制部150也可以每当将基板210、230贴合时预先设定基板210的初始贴合区域803,也可以按照基板210、230的每个种类来预先设定,也可以按照基板210、230的每个制造批次来预先设定,或者也可以按照基板210、230的每个制造工序来预先设定。此外,在针对制造批次或同一种类中包含的最初的基板210、230设定了初始贴合区域803之后,也可以针对同一批次内或同一种类内的基板210、230应用相同的初始贴合区域803。
此外,也可以在通过基板保持器240等吸附基板210、230而强制性地使其平坦的状态下,通过拉曼散射等对基板210、230的残留应力进行计测,而将该残留应力作为与基板的局部弯曲相关的信息。另外,基板210、230的局部弯曲也可以在预对准器500中测定。
另一方面,也可以不测定基板210、230的局部弯曲,而由控制部150分析性地获取与基板210、230的局部弯曲相关的信息,根据所获取的信息至少推断基板210的局部弯曲的特性,基于推断出的基板210的局部弯曲的特性,预先设定基板210的初始贴合区域803。在该情况下,也可以基于与基板210、230的制造工序、形成于基板210、230的电路区域216、236等构造物的结构、材料、基板210、230的种类、基板210、230中的应力分布相关的信息,推断在基板210、230中产生的翘曲的大小和方向、基板210、230的形状等局部弯曲的特性。另外,也可以将在形成上述构造物的过程中产生的针对基板210、230的制造工序、即与伴随着成膜等的热履历、蚀刻等化学处理相关的信息作为成为翘曲的原因的信息,基于这些信息来推断在基板210、230中产生的翘曲。
另外,在推断在基板210、230中产生的局部弯曲的特性的情况下,也可以一并参照成为在基板210、230中产生的局部弯曲的原因的基板210、230的表面构造、层叠于基板210的薄膜的膜厚、成膜所使用的CVD装置等成膜装置的趋势、偏差、成膜的顺序、条件等周边信息。这些周边信息也可以以推断局部弯曲的特性为目的而重新测定。
而且,为了推断上述的基板210、230的局部弯曲的特性,也可以参照对同等基板进行处理的过去的数据等,也可以对与贴合的基板210、230同等的基板进行假定的工序的实验,预先准备局部弯曲即翘曲量与非线性形变的关系、翘曲量的差异与两基板间的非线性形变差的关系、或者两基板间的非线性形变差即位置偏移量为阈值以下的翘曲量的组合的数据。而且,也可以基于贴合的基板210、230的成膜构造、成膜条件,通过有限要素法等分析性地求出翘曲量来准备数据。
此外,针对基板210、230的形变量的测定也可以在基板贴合装置100的外部执行,也可以在基板贴合装置100、或者包含基板贴合装置100的系统的内部组装对基板210、230的形变进行测定的装置。而且,也可以同时采用内外的测定装置,增加测定项目。
这里,使用图29对初始贴合区域较大的优点进行说明。图29是对使用具有外周通气路径822的基板保持器820将基板210、230贴合的过程(A)与使用具有最外周通气路径622的基板保持器220将基板210、230贴合的过程(B)的对比进行说明的图。
如图29所示,基板保持器820的外周通气路径822比基板保持器220的最外周通气路径622靠内侧。在这种情况下,如图29的(A)和(B)的左侧图所示,能够将在保持基板210的最外周区域的期间贴合的初始贴合区域803的外形设定成,基板保持器220比基板保持器820大。因此,即使基板保持器220不变更基板保持器220本身的结构,也能够与多种初始贴合区域的大小对应。
并且,如与图29的(A)和(B)的右侧对比所示,在将初始贴合区域贴合之后释放外周通气路径822和最外周通气路径622的情况下,在基板210中产生的局部弯曲由于释放而要复原。在这种情况下,关于基板保持器220,已经贴合至更接近外周的一侧,因此弯曲的大小C2比基板保持器820的弯曲的大小C1小,因而贴合对形变赋予的影响也较小。因此,通过初始贴合区域较大,能够将基板210的局部弯曲对贴合的形变赋予的影响抑制得小。
此外,在主要的实施方式中,形成控制部150预先决定规定的数量的初始贴合区域803,在基板保持器220和贴合部300中预先设置对应的数量的观察孔601等、观察窗361等、检测器341等的结构。也可以取而代之,而在控制部150基于解除侧的基板210的局部弯曲的特性预先设定任意大小的初始贴合区域803的情况下,在基板保持器220和贴合部300预先设置连续的直线状的观察孔、窗,并在与它们对应的位置预先设置作为检测器的线传感器。由此,观察部345能够观察任意大小的初始贴合区域803贴合。
图30是其他实施方式的基板保持器920的示意性俯视图。图31是在图30的示意性俯视图的基板保持器920的中心处折弯的III-III线处切断的情况下的、保持基板210的基板保持器920的示意性剖视图。在本实施方式中,取代在主要的实施方式中使用的解除侧用的基板保持器220,而使用基板保持器920。此外,固定侧用的基板保持器240与在主要的实施方式中使用的结构相同,因此省略重复的说明。另外,对于基板保持器920中的与基板保持器220相同的结构,使用相同的或者对应的参照编号,省略重复的说明。此外,在图30中,为了说明的明确化,省略多个支承销924的图示。
基板保持器920的主体部929具有:4个圆环状的支承部925、926、927、928,其在保持面921上与基板保持器920的中心形成为同心圆状;以及多个直线状的支承部922,其在保持面921状从基板保持器920的中心呈放射状形成。4个支承部925、926、927、928从基板保持器920的中心侧依次配置。支承部925的内周面与设置于主体部929的大致中央的圆筒状的凹部923的内周面对齐,在保持面921上包围凹部923的周围。支承部928具有与由基板保持器920保持的基板210的外形大致相同的外形。支承部927在保持面921上位于比支承部928稍微靠中心侧的位置,与支承部928一同在基板保持器920的最外周侧形成圆环状的槽。支承部926位于基板保持器920的径向上的、支承部925与支承部927的中间,将支承部925与支承部927之间的区域分割为内周侧和外周侧。多个支承部922形成为与支承部925等交叉,将支承部925与支承部926之间的区域、支承部926与支承部927之间的区域、以及支承部927与支承部928之间的区域分别分割成多个。
主体部929还具有内周通气路径931、外周通气路径932以及最外周通气路径933。内周通气路径931位于保持面921上的支承部925与支承部926之间且由多个支承部922相互隔离的多个扇形区域中的各个扇形区域,在一端具有在未形成多个支承销924的部位开口的多个吸气孔。内周通气路径931的另一端经由基板保持器920的外部的控制阀723选择性地与负压源733和开放端743结合。外周通气路径932位于保持面921上的支承部926与支承部927之间且由多个支承部922相互隔离的多个扇形区域中的各个扇形区域,在一端具有在未形成多个支承销924的部位开口的多个吸气孔。外周通气路径932的另一端经由基板保持器920的外部的控制阀725选择性地与负压源735和开放端745结合。最外周通气路径933位于保持面921上的支承部927与支承部928之间且由多个支承部922相互隔离的多个扇形区域中的各个扇形区域,在一端具有在未形成多个支承销924的部位开口的多个吸气孔。最外周通气路径933的另一端经由基板保持器920的外部的控制阀727选择性地与负压源737和开放端747结合。以下,有时将基板210的面内的径向的中央侧的区域且在基板保持器920的支承部925与支承部926之间被吸附的区域称为基板210的内周区域。另外,有时将基板210的面内的径向的外侧的区域且在基板保持器920的支承部227与支承部228之间被吸附的区域称为基板210的最外周区域。另外,有时将基板210的面内的内周区域与最外周区域之间的区域且在基板保持器920的支承部226与支承部227之间被吸附的区域称为基板210的外周区域。
为了能够吸附基板210的外周区域和最外周区域,将外周通气路径932和最外周通气路径933的一端的多个吸气孔设置于基板保持器920的外周和最外周,但如图31所示,通过使外周通气路径932和最外周通气路径933在基板保持器920的内部相互在厚度方向上偏离并且在面方向上延伸来形成,从而将另一端靠近基板保持器920的中心侧而配置。由此,基板保持器920也能够应用于真空板或基板贴合工作台等,该真空板或基板贴合工作台保持基板保持器920并将用于对基板保持器920的各通气路径赋予吸气或者排气的空气配管集中于基板保持器920保持面的中央来形成。
控制阀723、725、727在控制部150的控制下,使内周通气路径931、外周通气路径932、最外周通气路径933分别选择性地与负压源733、735、737连通。在将基板210载置于支承部925等和多个支承销924上的状态下,控制阀723、725、727使内周通气路径931、外周通气路径932、最外周通气路径933分别与负压源733、735、737连通的情况下,对内周通气路径931、外周通气路径932、最外周通气路径933各自的多个吸气孔作用负压。由此,在基板210与保持面921之间且分别被多个支承部922在周向上分割成多个的支承部925与支承部926之间的空间、支承部926与支承部927之间的空间、以及支承部927与支承部928之间的空间分别被减压,基板210被吸附于基板保持器920。另一方面,在从将基板210吸附于基板保持器920的状态起,控制阀723、725、727使内周通气路径931、外周通气路径932、最外周通气路径933分别与开放端743、745、747连通的情况下,解除基板保持器920对基板210的吸附。
这样,内周通气路径931、外周通气路径932和最外周通气路径933分别与由控制部150单独控制的控制阀723、725、727结合,各自的一端的多个吸附孔在由支承部926、支承部927和支承部928相互隔离的各空间开口。由此,基板保持器920在控制部150的控制下,能够单独地吸附基板210的径向上的内周区域、外周区域和最外周区域,并且能够单独地解除吸附。换言之,基板保持器920具有相互隔离且独立的、沿着径向配设为同心圆状的内周吸附区域、外周吸附区域和最外周吸附区域。此外,除此之外,在各区域的周向上,也能够相互独立地吸附和释放。
主体部929还具有:4个观察孔901、902、903、904,其形成于保持面921上的支承部925与支承部926之间以及支承部926与支承部927之间且未形成多个支承销924的4个部位,在厚度方向上贯通基板保持器920;以及观察孔905,其形成在保持面921上的支承部927与支承部928之间,在厚度方向上贯通基板保持器920。5个观察孔901、902、903、904、905如在图30的示意性俯视图中与在基板保持器920的中心处折弯的直线状的III-III线重叠表示那样,位于沿着基板保持器920的径向的大致同一直线上。3个观察孔901、902、903在靠近基板保持器920的中心的支承部925与支承部926之间,从基板保持器920的中心侧起依次大致等间隔地配置。观察孔904位于支承部926与支承部927之间的外周侧。此外,观察孔901等分别由相对于在观察基板210的情况下使用的照明光的波长为透明的材料来填充,观察孔901等的两端与基板保持器920的两平面一同平滑地形成。
图32是对使用基板保持器920贴合基板210、230的过程进行说明的说明图。控制部150借助观察部345通过基板保持器920的观察孔901等来观察贴合区域801的扩大,随着贴合区域801扩大,而从基板保持器920的中央侧朝向外周侧依次解除上述的多个吸附区域的吸附。在基板保持器920中,内周通气路径931、外周通气路径932和最外周通气路径933的从负压释放的定时优选为,将基板210从贴合区域立起的部分与贴合区域之间所成的角R尽量维持恒定并且扩大贴合区域。由此,能够使因空气阻力而产生的形变保持恒定,并抑制形变的非线性。
特别是,基板保持器920从内周朝向外周具有内周通气路径931、外周通气路径932和最外周通气路径933,因此与像基板保持器220那样由内周通气路径621和最外周通气路径622这二个进行控制相比,能够将R进一步维持恒定。此外,也可以取代增加通气路径的数量或者在此基础上,而通过伴随着贴合区域的扩大改变突出部件950的突出量,来将R维持恒定。在这种情况下,也可以使突出部件950的突出量本身主动变化,也可以通过来自对置的基板保持器240的上推力,经由基板210和230而使突出部件950的突出量本身被动地变化。
这里,在保持解除侧的基板210的最外周区域的期间贴合的初始贴合区域803的大小、解除侧的基板保持器220、920中的突出部件250、950的高度、以及解除侧的基板保持器220、920吸附基板210的吸附面积的大小有时具有相关性。例如,在基板保持器220、920保持基板210的状态下突出部件250、950的高度越小,则保持基板210的状态下的基板210的中央附近的凸状的曲率越小,因此初始贴合区域803变大。由此,有时由局部翘曲所引起的非线性形变减少。另外,根据突出部件250、950而解除侧的基板210的中央附近变形为凸状的量变小,因此有时基板210的中央附近的非线性形变减少。
另外,作为一例,若将基板保持器220、920对基板210的吸附面积设定得小、即在仅保持基板210的外周端部侧的状态下进行基板210、230的贴合,则在保持基板210的状态下的基板210中靠近基板230的面积变大,因此初始贴合区域803变大。由此,有时由局部翘曲所引起的非线性形变减少,而且吸附倍率形变减少。
图33是说明根据解除侧的基板210中的总体翘曲的有无来变更初始贴合区域的设定的情况的说明图。在图33中,对于在解除侧的基板210中无总体翘曲的情况和有总体翘曲的情况、未形成初始贴合区域的情况和形成初始贴合区域的情况的4个组合,将贴合的基板的半径方向的位置与在贴合的基板间产生的位置偏移的关系的示意性的曲线图表示于表内。在图33所示的各曲线图中,实线表示位置偏移,虚线表示平均倍率。更具体而言,平均倍率是通过最小平方法而求出的倍率。另外,各曲线图中的实线与虚线的差分是指非线性形变的大小。
若解除侧的基板210中的总体翘曲较大,则有时空气阻力所引起的倍率形变随着从基板210的中央侧朝向外周侧而变大。在该情况下,在总体翘曲较大的基板210中,在外周侧,非线性形变变大。
如图33的表左上所示,在解除侧的基板210中没有总体翘曲的情况下,即使不形成初始贴合区域,也有时不容易产生非线性形变。但是,严格来说,即使在没有总体翘曲的基板210中,因空气阻力所引起的倍率形变在基板210的面内逐渐变化,因此也会产生非线性形变。
另一方面,如图33的表左下所示,在解除侧的基板210中没有总体翘曲的情况下,例如在通过减小基于基板保持器220的最外周吸附区域或者减小突出部件250的凸量而形成初始贴合区域的情况下,有时解除侧的基板210的面内中央区域和面内外周区域中的非线性形变变大,产生因该非线性形变所引起的位置偏移。
另外,如图33的表右上所示,在解除侧的基板210中有总体翘曲的情况下,在未形成初始贴合区域的情况下,有时解除侧的基板210的面内外周区域中的非线性形变变大,产生因该非线性形变所引起的位置偏移。
另一方面,如图33的表右下所示,在解除侧的基板210中有总体翘曲的情况下,在形成初始贴合区域的情况下,有时在解除侧的基板210的面内中央区域中产生非线性形变,但缓和面内外周区域中的非线性形变,整体上因非线性形变所引起的位置偏移变小。优选产生对于在基板210的整体观察到的非线性形变而言合适的大小的初始贴合区域。
像这样,在解除侧的基板210中没有总体翘曲的情况下,与形成初始贴合区域相比,有时优选不形成初始贴合区域,在解除侧的基板210中有总体翘曲的情况下,有时优选扩大初始贴合区域的大小。因此,也可以考虑解除侧的基板210的面内中央区域中的非线性形变和面内外周区域中的非线性形变的平衡,以整体上非线性形变变小的方式设定初始贴合区域的大小。例如,也可以以作为各曲线图中的实线与虚线的差分而表示的非线性形变的大小的最大值、平均值和3σ(σ为标准偏差)中的至少一个为预先决定的阈值以下的方式设定初始贴合区域的大小。
在以上的多个实施方式中,基板贴合装置100也可以执行按照以下的(1)至(6)的顺序进行基板贴合的序列。(1)通过解除侧的基板保持器220、920吸附基板210的内周区域和最外周区域、或者基板210的内周区域、外周区域和最外周区域。(2)进行EGA(增强、总体、对准)计测。(3)使基板210、230的一部分相互接触来形成贴合区域801。(4)将解除侧的基板保持器220、920对基板210的吸附变更为仅在基板210的最外周区域。(5)进行待机直到通过上述的贴合区域801扩大而预先设定的初始贴合区域803贴合为止。(6)根据检测出初始贴合区域803贴合,还解除解除侧的基板保持器220、920对基板210的最外周区域的吸附,由此解除基板210的保持。在通过基板保持器220吸附基板210的最外周区域的状态下将基板210、230对位的情况下,有时很难进行形成于基板210的EGA计测标记的检测,但基板贴合装置100通过执行该序列,能够正确地检测EGA计测标记。
在以上的多个实施方式中,基板贴合装置100也可以进一步具备计算装置,该计算装置基于与解除侧的基板210的形变相关的信息,计算使基板210变形为凸状的凸量、为了通过基板保持器220保持基板210而吸附基板210的外周部分的吸附面积、以及解除基板保持器220对基板210的保持的定时中的至少任一个参数。优选预先求出各参数与基板210中的非线性形变的关系。另外,在该情况下,由该计算装置计算出的各参数也可以自动地设定于基板贴合装置100。另外,该计算装置也可以与基板贴合装置100单独地设置,例如用户获取由计算装置计算出的各参数,手动地向基板贴合装置100输入。此外,使基板210变形为凸状的凸量例如也可以是突出部件250的突出量,也可以是与相互贴合的基板210、230之间的间隙对应的值。此外,对基板210的外周部分进行吸附的吸附面积例如也可以是与由基板保持器220的多个支承部区分的多个吸附区域中的各个吸附区域对应的基板保持器220的面积、或者是基板210的与基板230贴合的面的背面中的、由基板保持器220保持的基板210的面积。
在以上的多个实施方式中,也可以取代使用多个支承部的吸附区域的区分方式,而沿着接合波的行进方向设置多个真空孔。在该情况下,也可以将真空孔的间隔设定成允许通过吊起而产生的形变量的大小。
在以上的多个实施方式中,突出部件的驱动采用气压式,但也可以取而代之,采用不使用气压的弹簧式的突出部件。在该情况下,弹簧具有仅使基板变形的加压,弹簧的加压比使一对基板接触时的压入负荷大。在采用弹簧式的情况下,也可以在使一对基板接触之后增大基于工作台的压入负荷而逐渐压入突出部件,此时也可以使两基板保持器成为具有弹簧式的突出部件的结构。由此,能够使贴合的一对基板的变形相互成为镜像关系,能够抑制非线性形变。
在以上的多个实施方式中,不论突出部件的突出量为恒定还是逐渐变小,都可以以在解除侧的基板由于突出部件而变形的情况下,在该基板中产生的非线性形变的量为预先决定的阈值以下的方式设定突出部件的突出量或者其最大值。
在以上的多个实施方式中的各个实施方式中,单独地说明了针对因结晶各向异性所引起的非线性形变、因空气阻力所引起的倍率形变、以及因基板的局部弯曲所引起的非线性形变的对策。为了消除因这些各种形变所引起的、在贴合基板而形成的层叠基板中产生的位置偏移,也可以组合几个对策,也可以优选为采取全部的对策。
在以上的多个实施方式中,说明了观察部光学性地观察初始贴合区域贴合的结构。也可以取而代之或者在此基础上,观察部例如通过检测基板彼此最初接触之后经过了预先决定的时间,来判断为初始贴合区域贴合。在该情况下,预先存储有表示经过时间与初始贴合区域的大小的关系的数据,观察部基于该数据来判断为初始贴合区域贴合。另外,观察部也可以通过观察贴合的基板间的距离的变化、或者通过观察基板与基板保持器之间的距离的变化,来判断为初始贴合区域贴合。在该情况下,观察部例如也可以具备:相对于贴合的基板配设在相同侧的光源和拍摄部、以及配设在相反侧的背景板,光源在拍摄部的拍摄视场内照射贴合的基板,由拍摄部拍摄形成于背景板的基板的贴合状态的图像。此外,由拍摄部获取的图像不限于直接拍摄基板的形状而得的图像,例如也可以基于在贴合的基板间产生的干扰等光学现象所产生的干扰条纹影像的变化等,判断基板的贴合的状态。
另外,观察部也可以通过观察贴合的基板的至少一方的电特性的变化,来判断为初始贴合区域贴合。在该情况下,观察部例如具备静电电容检测部,静电电容检测部对包含成为测定对象的一对基板间的静电电容和标准电感而形成的LC共振电路施加周期性地变化的电信号。此时,静电电容检测部在对具有静电卡盘的功能的基板保持器施加的DC电压上重叠AC电压,检测根据一对基板中的静电电容的变化而变化的电信号的AC成分。随着接合波行进,而贴合的基板间的间隔变窄,间隔越窄则一对基板间的静电电容越大。因此,观察部也可以通过使电端子与贴合的各基板接触,检测与基板的贴合状态的变化对应的静电电容的变化,由此判断基板的贴合状态。在解除侧的基板保持器中,例如也可以将突出部件250作为电端子来使用。控制部也可以通过检测出静电电容的值恒定且恒定的负荷值维持了阈值时间,来判断为贴合完成。
在上述实施例中,示出在将基板210整面地保持于基板保持器220、920的状态下搬入上工作台322,通过解除基板保持器220、920的一部分的保持而产生接合波,形成初始贴合区域803的例子,但也可以取而代之,使用以下的实施例。在仅将基板210的外周部保持于基板保持器220、920的状态下搬入上工作台322,在使基板210的一部分与基板230接触而形成接触区域之后,在将基板210的外周部保持于基板保持器220、920的状态下,通过活化后的表面相互的分子间力等而自主地产生基板210、230之间的接合波,由此形成初始贴合区域803。在该情况下也是,在直到接合波停止为止的期间通过判断部判断出初始贴合区域803的形成时或者之后,解除基板保持器220、920对基板210的外周部的保持。或者,也可以以在基板210的接合波停止时形成的初始贴合区域803的大小为预先设定的大小的方式,设定基板保持器220、920对基板210的保持面积的大小。
以上,使用实施方式对本发明进行了说明,但本发明的技术范围不限于上述实施方式所记载的范围。对于本领域技术人员来说,显然能够对上述实施方式施加多种变更或者改进。根据权利要求书的记载可知,施加了这样的变更或者改进的方式也包含于本发明的技术范围中。
应该注意的是,在权利要求书、说明书以及附图中所示的装置、系统、程序和方法中的动作、顺序、步骤和阶段等各处理的执行顺序只要没有特别指明“之前”、“事先”等,另外只要没有将之前的处理的输出用于之后的处理,就能够以任意的顺序实现。关于权利要求书、说明书和附图中的动作流程,为了方便而使用“首先,”、“接下来,”等进行了说明,并不是意味着必须按照该顺序实施。
附图标记说明:100…基板贴合装置;110…壳体;120、130…基板盒;140…输送部;150…控制部;208、209…硅单晶基板;210、230、610、630…基板;212、232…刻线;214…缺口;215…隆起部;216、236…电路区域;218、238…对准标记;220、240、920…基板保持器;221、241、921…保持面;223…凹部;224、244、924…支承销;225、226、227、247、922、925、926、927、928…支承部;229、929…主体部;250…突出部件;251…抵接部;255…板弹簧;290…层叠基板;300…贴合部;310…框体;312…底板;316…顶板;322…上工作台;324、334…显微镜;326、336…活化装置;331…X方向驱动部;332…下工作台;333…Y方向驱动部;338…升降驱动部;341、342、343、344…检测器;345…观察部;351…光源;352…受光部;361、362、363、364…观察窗;400…保持器储存器;500…预对准器;601、602、603、604、901、902、903、904、905…观察孔;621…内周通气路径;622、933…最外周通气路径;625…中心通气路径;640…通气路径;721、723、724、725、727、751…控制阀;731…正压源;733、734、735、737、761…负压源;741、743、744、745、747、771…开放端;801…贴合区域;803…初始贴合区域;931…内周通气路径;932…外周通气路径。
- 基板贴合装置、计算装置、基板贴合方法和计算方法
- 基板贴合装置、对位装置、基板贴合方法、对位方法、以及层叠半导体装置的制造方法