动态多功能电源控制器
文献发布时间:2023-06-19 11:21:00
技术领域
本发明有关于一种动态多功能电源控制器,尤其是因应不同尖峰负载需求,侦测瞬时输出电流及瞬时输出功率的其中之一以及平均输出电流及平均输出功率的其中之一,进而提供保护机制,并在异常状态后停止发送驱动信号而休息一段时间后再重启,可避免在异常状态未解除时持续处在高瓦数状态,达到降低平均输出功率的省电节能功效。
背景技术
许多电器设备在开始上电的瞬间,常常会发生尖峰负载(Peak Load),也是属于其中一种的异常状态,比如马达。举例而言,消耗功率为60W且操作电压为12V的马达,其正常操作电流为5A(=60/12),但是在刚开始上电时,操作电流会冲上10A,并维持约2秒。为避免发生欠压锁定(Undervoltage-Lockout,UVLO),通常需要加大变压器尺寸,不过实际上发生尖峰负载的时间很短,导致变压器过度设计,形成浪费。
在现有技术中,一般是采取自动回复(Auto recovery)的保护机制以避免使用过大的变压器,简单而言,当过载保护发生后,系统立即关闭脉冲宽度调变(Pulse WidthModulation,PWM)驱动信号,之后经过多次的自动回复,如果在此期间,过载保护条件消失,则回复正常操作。
然而,上述现有技术的缺点在于如果经过多次的自动回复后而保护条件仍然成立时,则系统仍会进入锁定模式(latch mode),导致整个系统无法正常运作而停滞,此时,只有手动才可解除。
因此,电子/电气产业界非常需要一种新颖设计的动态多功能电源控制器,可因应不同尖峰负载需求,主动侦测流过外部负载的瞬时输出电流及瞬时输出功率的其中之一以及平均输出电流及平均输出功率的其中之一,进而提供保护机制,并在发生状态时停止发送驱动信号一段时间,之后才重新发送驱动信号,可避免在异常状态未解除时持续处在高瓦数状态,进而降低平均输出功率,达到省电节能功效,藉以克服现有技术的问题。
发明内容
本发明的主要目的在于提供一种动态多功能电源控制器,是进行电源控制处理,用以产生并发送脉冲宽度调变驱动信号,且PWM驱动信号是用以驱动连接至动态多功能电源控制器的驱动元件。此外,一次侧电感、驱动元件以及感测电阻是依序串接在输入电压以及接地电位之间,而流过一次侧电感的导通电流是藉电磁感应作而由二次侧电感产生感应电流,且感应电流经串接的输出整流元件及输出滤波元件而产生输出电源,用以供应外部负载。再者,感测电阻的二端部是藉导通电流而产生感测电压。
具体而言,电源控制处理包含:开始步骤,是在电源打开时启动;信号产生步骤,产生并发送PWM驱动信号至驱动元件,以控制驱动元件导通或关闭导通电流;侦测步骤,利用对应于输出电源的比较电压以侦测是否发生异常状态,且异常状态是发生在比较电压大于预设的电压临界值时,而如果未发生异常状态,则回到信号产生步骤,持续发送PWM驱动信号,直到发生异常状态;如果发生异常状态,则停止发送PWM驱动信号;等待一段预设的等待时间;以及重新发送PWM驱动信号以进行自动回复(auto recovery),并回到侦测步骤。
进一步,比较电压是由连接外部负载以及动态多功能电源控制器的反馈电路所产生,或者,比较电压是由动态多功能电源控制器利用感测电压及输入电压而产生。尤其,PWM驱动信号的频率为20~300KHz,且是依据比较电压而动态调整。
因此,本发明可因应不同尖峰负载需求,主动侦测流过外部负载的瞬时输出电流及瞬时输出功率的其中之一以及平均输出电流及平均输出功率的其中之一,进而提供保护机制,并在发生状态时停止发送驱动信号一段时间,之后才重新发送驱动信号,可避免在异常状态未解除时持续处在高瓦数状态,进而降低平均输出功率,达到省电节能功效。
附图说明
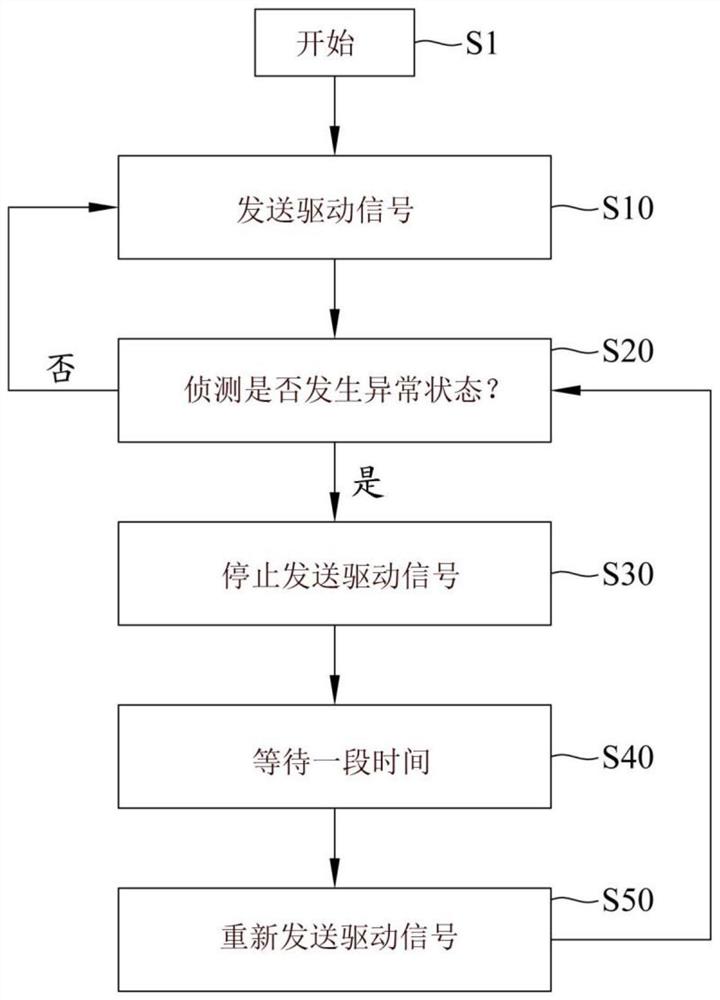
图1显示本发明实施例动态多功能电源控制器的操作流程示意图。
图2显示本发明实施例动态多功能电源控制器的应用实例示意图。
图3显示本发明实施例动态多功能电源控制器的操作波形示意图。
图4显示本发明实施例动态多功能电源控制器中PWM驱动信号频率的示意图。
图5显示本发明另一实施例动态多功能电源控制器的操作流程示意图。
图6显示本发明又一实施例动态多功能电源控制器的操作流程示意图。
图7显示本发明又一实施例动态多功能电源控制器的操作波形示意图。
其中,附图标记说明如下:
C 输出滤波元件
CT PWM控制器
D 输出整流元件
GND 接地电位
FSW 频率
IP 导通电流
IS 感应电流
LP 一次侧电感
LS 二次侧电感
Q 驱动单元
RCT 整流单元
RST 控制器整流单元
RD 外部负载
RS 感测电阻
TON 导通时间
VAC 输入交流电压
VCOM 比较电压VDD控制器电源电压
VGS PWM驱动信号
VI 输入电压
VO 输出电源
VS 感测电压
UVLO_off 关闭电压
UVLO_on 打开电压
S1、S10、S20、S30、S40、S50 步骤
S42、S44、S60、S70 步骤
S46、S47、S48 步骤
具体实施方式
以下配合图示及附图标记对本发明的实施方式做更详细的说明,使本领域技术人员在研读本说明书后能据以实施。
请同时参阅图1及图2,其中图1为本发明实施例动态多功能电源控制器的操作流程示意图,而图2为本发明实施例动态多功能电源控制器的应用实例示意图。如图1及图2所示,本发明实施例的动态多功能电源控制器CT是进行包含执行步骤S1、S10、S20、S30、S40以及S50的电源控制处理,用以产生并发送脉冲宽度调变(Pulse Width Modulation,PWM)驱动信号VGS。进一步,PWM驱动信号VGS可用以驱动连接至动态多功能电源控制器CT的驱动元件Q,比如驱动元件Q可为金氧半(Metal-Oxide-Semiconductor,MOS)元件或双载子(Bipolar)元件,不过为了清楚说明起见,图中是显示MOS元件以当作示范性实例,所以PWM驱动信号VGS是连接至MOS元件的闸极(Gate),而如果是使用双载子元件,则PWM驱动信号VGS是连接至双载子元件的基极(Base)。本质上,PWM驱动信号VGS是具有特定频率的脉冲波,一般而言,PWM驱动信号VGS的频率高低是依实际应用环境的负载状态而决定,在此,本发明中PWM驱动信号VGS的频率为20~300KHz。
再者,进一步将一次侧(Primary side)电感LP、驱动元件Q以及感测电阻RS依序串接在输入电压VI以及接地电位GND之间,而流过一次侧电感LP的导通电流IP是藉电磁感应作而由二次侧(Secondary side)电感LS产生感应电流IS,且感应电流IS经串接的输出整流元件D及输出滤波元件C,进而在输出滤波元件C的二端部产生输出电源VO以供应外部负载RD,其中二次侧电感LS、输出整流元件D以及输出滤波元件C是依序串接,而外部负载RD是并联连接至输出滤波元件C。
举例而言,输出整流元件D可为具提供整流作用的二极体(Diode),而输出滤波元件C可为电容器(Capacitor),用以提供滤波功能而稳定输出电源VO。
此外,输入电压VI是由整流单元RCT接收输入交流电压VAC,并经整流处理后而产生,其中输入交流电压VAC为90~400V,而且输入交流电压VAC的频率可为50Hz、60Hz或400Hz。
再者,多功能电源控制器CT是进一步搭配控制器整流单元RST,并接收来自控制器整流单元RST的控制器电源电压VDD而运作,换言之,多功能电源控制器CT是在接收到正常的控制器电源电压VDD后,才进行电源控制处理,其中控制器整流单元RST是接收输入交流电压VAC,并经辅助整流处理后而产生控制器电源电压VDD。进一步,控制器整流单元RST有许多实现方式,是属于一般现有领域,在此只简单的举例说明而不详细分析。
控制器整流单元RST可包含二辅助分压电阻、辅助稳压电容、辅助整流二极体、辅助电阻以及辅助绕组(图中未显示),其中该二辅助分压电阻是相互串接而跨接到输入交流电压VAC,且辅助稳压电容是跨接在接地电位GND以及该二辅助分压电阻的连接点之间,此外,辅助整流二极体、辅助电阻以及辅助绕组是依序串接在该二辅助分压电阻的连接点以及接地电位GND之间,尤其,辅助整流二极体的负极连接至该二辅助分压电阻的连接点。辅助电阻是耦合一次侧电感LP,并藉电磁感应而产生辅助电流,并流过辅助电阻及辅助整流二极体而对辅助稳压电容充电以蓄积电能,并产生所需的控制器电源电压VDD以供应多功能电源控制器CT。显而易见的是,控制器电源电压VDD会受一次侧电感LP的导通电流IP所影响,而且导通电流IP也影响输出电源VO及比较电压VCOM,亦即,控制器电源电压VDD、导通电流IP、输出电源VO及比较电压VCOM之间具有相互影响的关系,换言之,当发生过载异常时,不仅会影响到输出电源VO,连带的控制器电源电压VDD也被影响。
上述动态多功能电源控制器CT的电源控制处理是从步骤S1开始,主要是在电源打开时启动,比如图中的输入交流电压VAC开始输入而产生输入电压VI时,紧接着进入步骤S10,亦即信号产生步骤,用以产生并发送PWM驱动信号VGS至驱动元件Q,具体而言,是驱动元件Q的闸极,藉以控制驱动元件Q为打开或关闭而导通或关闭导通电流IP。此外,导通电流IP会导致感测电阻RS的二端部产生感测电压VS。
然后执行步骤S20,亦即侦测步骤,利用对应于输出电源VO的比较电压VCOM以侦测输出电源VO是否发生异常状态。如果未发生异常状态,则回到步骤S10,亦即信号产生步骤,并持续发送PWM驱动信号VGS,直到发生异常状态,而如果发生异常状态,则进入步骤S30。在此,异常状态是指比较电压VCOM大于预设的电压临界值时,亦即输出电源VO发生过载(OverLoading),而许多电器设备在开始上电的瞬间会发生导通电流过大的尖峰负载(PeakLoad),也是属于其中一种的异常状态。
上述的比较电压VCOM可由连接于外部负载RD以及动态多功能电源控制器CT之间的反馈电路(图中未显示)所产生,比如使用光耦合元件当作反馈电路,亦即包含发光二极体(Photo Diode)以及光感测元件(Photo Sensor),此外,比较电压VCOM也可由动态多功能电源控制器CT利用感测电压RS及输入电压VI经计算而产生。
较佳的,本发明中PWM驱动信号VGS的频率是依据比较电压VCOM而动态调整,藉以降低损失,大幅提高整体电源转换效率。
在步骤S30中,立即停止发送PWM驱动信号VGS,藉以关闭驱动元件Q,同时阻止导通电流IP流过驱动元件Q。紧接着进入步骤S40,等待一段预设的等待时间,在此称为过载保护延迟时间(OLP Delay Time),举例而言,等待时间为0.5~100秒。之后执行步骤S50,重新发送PWM驱动信号VGS以进行自动回复(auto recovery),并回到步骤S20,侦测输出电源VO是否发生异常状态。
接着参考图3,本发明实施例动态多功能电源控制器的操作波形示意图,其中示范性显示输入交流电压VAC、控制器电源电压VDD、PWM驱动信号VGS的操作波形,其中输入交流电压VAC是持续由外部输入。
进一步而言,在发生过载的异常状态时,本发明的动态多功能电源控制器CT会立即停止发送PWM驱动信号VGS,并持续一段时间,比如24~40秒,在此期间,PWM驱动信号VGS为0V,而且控制器电源电压VDD会在打开电压UVLO_on以及关闭电压UVLO_off之间来回充放电,尤其,当控制器电源电压VDD高于打开电压UVLO_on时,也不会开始PWM驱动信号VGS,一直要到设定时间时,比如0.5~100秒之后,此时,如果控制器电源电压VDD是高于打开电压UVLO_on,则开始判断输入交流电压VAC是否正常,如果输入交流电压VAC是正常,才开始恢复产生PWM驱动信号VGS,否则仍不产生PWM驱动信号VGS。
更加具体而言,PWM驱动信号VGS的频率FSW以及比较电压VCOM之间的关系可参考图4,显而易见的是,PWM驱动信号VGS的频率FSW是依据比较电压VCOM而动态调整。进一步,如果比较电压VCOM为小于1.5V时,是不产生PWM驱动信号VGS,因此,PWM驱动信号VGS的频率FSW为0。如果比较电压VCOM为1.5V~1.95V时,则PWM驱动信号VGS的频率FSW是固定于20KHz。如果比较电压VCOM是在1.95V~2.25V之间时,则PWM驱动信号VGS的频率FSW是设定为依据比较电压VCOM的上升而由20KHz线性增加至65KHz。如果比较电压VCOM为2.25V~2.7V时,则PWM驱动信号VGS的频率FSW是维持在65KHz。如果比较电压VCOM为2.7V~3.0V时,则PWM驱动信号VGS的频率FSW是设定为依据比较电压VCOM的上升而由65KHz线性增加至300KHz。最后,如果比较电压VCOM为大于或等于3.0V时,则PWM驱动信号VGS的频率FSW是设定成固定于最高值的300KHz。
再回到图1,本发明的动态多功能电源控制器在负载发生过载异常时,会立即停止发送PWM驱动信号VGS,并在等待预设的等待时间之后,便会无条件进入自动回复,重新发送PWM驱动信号VGS,亦即,本发明是预期系统的过载异常状态可在等待时间之内解除,然而,如果过载异常状态维持一段够长的时间,则过载所引发的大电流仍会对整个系统产生危害,甚至失效、烧毁。
因此,为了强化上述图1中动态多功能电源控制器的操作流程,本发明进一步提供如图5所示的另一实施方式,藉以避免长时间的过载异常状态危害整个系统的操作安全性及稳定性。
要注意的是,图5及图1在实质上的具体作法是分为二种不同操作模式,比如图1的操作模式为初级操作模式,而图5的操作模式为进阶操作模式,并且是经模式设定参数以供使用者或系统选取。具体而言,图5主要是增加步骤S42、S44、S60及S70,而其余步骤则如同图1而不再赘述,且在步骤S40之后是进入步骤S42,而非直接步骤S50,换言之,如果模式设定参数是选取初级操作模式,则步骤S40之后是进入步骤S50,如图中虚线所示,亦即图1的操作模式,而如果模式设定参数是选取进阶操作模式,则步骤S40之后是进入步骤S42。
当然,上述的模式设定参数也可使用外部接脚设定而实现,比如利用特定的模式设定接脚,当模式设定接脚为逻辑高位准时,是选定进阶操作模式,如果是逻辑低位准,则选定初级操作模式。
接着详细说明图5中步骤S42、S44、S60及S70的操作。在步骤S42中,本发明的动态多功能电源控制器CT会对等待次数进行计数处理而累加一次,并同时将等待次数储存在等待参数中,而在步骤S44中,判断等待次数是否已达到预设次数,比如N次,其中N为大于1的正整数。较佳的,预设次数可为2至200,且是预先储存或设定在预设次数参数中。
就实施方式而言,等待参数及预设次数参数是以个别的暂存器实现,而预设次数参数是预先设定,当然,预设次数参数也可比照类类似于上述利用模式设定接脚以设定操作模式的作法,并使用外部的次数参数设定接脚而实现,不过只可选取二种选数值。例如,当次数参数设定接脚为逻辑高位准时,是选定预设的第一数值当作预设次数参数,而如果是逻辑低位准,则选定预设的第二数值当作预设次数参数,比如第一数值为20而第二数值为200。
进一步,如果等待次数还未达到预设次数,则进入步骤S50,重新发送PWM驱动信号VGS,接着回到步骤S20。如果等待次数已达到预设次数,则进入步骤S60,仍维持停止发送PWM驱动信号VGS而进入欠压锁定状态,接着进入步骤S70,结束整个电源控制处理的操作。换言之,本发明的动态多功能电源控制器CT在等待次数达到预设次数时,即不再以电气控制方式介入系统的电源控制,而是停止整个电源控制处理,之后,必须由使用者或操作者以手动方式解决过载异常状态,比如手动关闭电源并再次手动重新打开电源。
请进一步参考图6及图7,分别为本发明又一实施例动态多功能电源控制器的操作流程示意图以及操作波形示意图。
如图6所示,本发明又一实施例的动态多功能电源控制器是进行包含执行步骤S1、S10、S20、S30、S46、S47、S48、S60以及S70的电源控制处理,是类似于图5的实施例,其中步骤S1、S10、S20、S30、S60以及S70已详细说明,因而下文中主要是说明步骤S46、S47、S48的操作内容。
在执行步骤S30而停止发送PWM驱动信号VGS后,如图7所示,并直接进入自动回复(Auto Recovery)步骤的步骤S46,进行自动回复,同时对自动回复次数进行记数,亦即,自动回复次数累加一,此时,比较电压VCOM降为0V,并且控制器电源电压VDD会持续下降,而当控制器电源电压VDD下降到关闭电压UVLO_off时,控制器电源电压VDD会转而持续上升,接着,当控制器电源电压VDD上升到打开电压UVLO_on时,会再次产生比较电压VCOM,因而动态多功能电源控制器CT会依据比较电压VCOM而发送PWM驱动信号VGS。换言之,整个步骤S46的操作称为自动回复。要注意的是,上述的自动回复次数在步骤S1中是设定为零,亦即开机后自动回复次数的启始值(default value)为零。
接着进入步骤S47,利用比较电压VCOM以判断异常状态是否解除,如果异常状态已解除,则将自动回复次数设为零,并回到步骤S10,继续后续的步骤,而如果异常状态还未解除,则进入步骤S48。在步骤S48中,判断自动回复次数是否达到预设的回复次数,如果自动回复次数还未达到预设的回复次数,则回到步骤S46,并继续后续的步骤,而如果自动回复次数已达到预设的回复次数,则进入步骤S60,并继续如上述图5实施例所示的后续步骤。
因此,图6的实施例主要是要在异常状态未解除而又持续处在高瓦数状态时,参考自动回复次数,藉以进入欠压锁定,避免系统失效,而之后,则必须手动拔掉电源再重插电源之后,动态多功能电源控制器CT才可恢复运作。
综合而言,本发明的特点主要在于利用过载保护延迟时间以因应不同尖峰负载需求,包含主动侦测流过外部负载的瞬时输出电流及瞬时输出功率的其中之一以及平均输出电流及平均输出功率的其中之一,进而提供保护机制,且在发生状态时停止发送驱动信号一段时间,亦即过载保护延迟时间,之后才重新发送驱动信号,可避免在异常状态未解除时持续处在高瓦数状态,进而降低平均输出功率,达到省电节能功效。
此外,本发明的另一特点主要在于判断等待次数是否达到预设次数,藉以决定是否进入欠压锁定状态,可避免过载异常状态持续未解除而导致电气元件损坏的风险提高。
再者,本发明的又一特点主要在于判断自动回复次数是否达到预设次数,藉以决定是否进入欠压锁定状态,可避免过载异常状态持续未解除而多次重复进入自动回复,导致电气元件损坏的风险提高,进而改善操作稳定性及安全性。
以上所述仅为用以解释本发明的较佳实施例,并非企图据以对本发明做任何形式上的限制,因此,凡有在相同的发明精神下所作有关本发明的任何修饰或变更,皆仍应包括在本发明意图保护的范畴。
- 动态多功能电源控制器
- 动态调节电源控制器