一种适用于触摸板装夹治具的扫码装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及非标设备制造技术领域,尤其是一种适用于触摸板装夹治具的扫码装置。
背景技术
触摸板(TouchPad或TrackPad),是一种广泛应用于笔记本电脑上的输入设备。触摸板利用感应用户手指的移动来控制指针的动作,其感应检测原理是电容传感。在触摸板表面下的一个特殊集成电路板会不停地测量和报告出此轨迹,从而探知手指的动作和位置。当使用触摸板操作鼠标光标时,将鼠标光标定位在对应的项目或图标上,并且通过敲击触摸板来选择对应的项目或图标。
如图1中所示,触摸板包括有触控面板、电路板及底板,其中,触控面板与电路板的顶面相固定,而电路板底面的局部区域通过胶层黏着固定于底板上。当使用者按压触控面板时,触控面板与电路板能以胶层的部位为轴进行摆动。
一般来说,通常借由触摸板装夹治具来完成触摸板的黏合成型。触摸板装夹治具包括有承载部和压盖部。压盖部相对于承载部沿着上下方向可自由地进行分离、扣合。实际操作过程中,首先将底板置放于承载部上,随后在底板上涂覆胶水层,而后将装配后的触控面板和电路板作为一个整体贴放于底板上,最后,将压盖部扣盖于承载部上,静置一段时间,使得承压的电路板和底板之间最终得到牢靠的黏合。
在现有技术中,当预黏合触摸板在承载部上放置完成后,采用人工的方式将压盖部盖合于承载部上,依靠重力以将电路板紧密地压合于底板上。而后将工作中的多件触摸板装夹治具通常依序排放于车间地面或工作台上,待胶水凝固后,采用人工的方式分离压盖部和承载部,以取出黏合成型后的触摸板。上次操作方式费时费力,工人的劳动强度极大,生产效率较低,且触摸板的最终成型质量受到工人操作经验以及情绪波动的影响较大,不利于进行质量管控;另外,摆放触摸板装夹治具需要占用较大的车间场地,不利于现场6S管理。为此,本公司近期开发了一款触摸板固化线。
在触摸板固化线的实际运行进程中,喂料工位工人需要对预处理触摸板上的标识码信息进行核对以及记录,以设定后续的胶水固化时长,且为后续准确入库作好铺垫。然而,此信息采集方式需要消耗大量的人力成本,且工人极易发生疲劳;另外,信息核对错误率极高,导致胶水固化时长与预处理触摸板不匹配现象时有发生,进而影响了触摸板的最终成型质量。因而,亟待技术人员解决上述问题。
发明内容
故,本发明设计人员鉴于上述现有的问题以及缺陷,乃搜集相关资料,经由多方的评估及考量,并经过从事于此行业的多年研发经验技术人员的不断实验以及修改,最终导致该适用于触摸板装夹治具的扫码装置的出现。
为了解决上述技术问题,本发明涉及了一种适用于触摸板装夹治具的扫码装置,其包括滑移座、滑移块、锁紧单元、第一支撑架、平面位置调节装置、第二支撑架、第三支撑架以及扫码枪。滑移座布置于触摸板装夹治具输送线的一侧,且其沿着由上至下方向依序由上置固定板、导向杆组件以及下置固定板连接而成。导向杆组件由相并排而置的第一导向杆、第二导向杆构成。滑移块同时地、可沿着着上下方向自由滑动地套设于第一导向杆、第二导向杆上,且在其上分别开设有与第一导向杆、第二导向杆外径相适配的第一导向孔、第二导向孔。当滑移块的相对高度位置调整到位后,借由锁紧单元以将滑移块锁定于滑移座上。第一支撑架、平面位置调节装置、第二支撑架、第三支撑架依序连接于滑移块和扫码枪之间。当平面位置调节装置发生动作时,以驱动扫码枪沿着前后方向或/和左右方向进行平移运动。
作为本发明技术方案的进一步改进,锁紧单元包括有第一锁紧螺钉、第二锁紧螺钉。正对应于第一导向孔,在滑移块上开设有供第一锁紧螺钉旋入、且与第一导向孔相贯通的第一螺纹孔。正对应于第二导向孔,在滑移块上开设有供第二锁紧螺钉旋入、且与第二导向孔相贯通的第二螺纹孔。当滑移块的相对高度位置调整到位后,对第一锁紧螺钉、第二锁紧螺钉进行旋动,直至分别实现对第一导向杆、第二导向杆的侧向压紧。
作为本发明技术方案的进一步改进,平面位置调节装置优选为二维工作台,其由X工作台和Y工作台相叠合而成。
作为本发明技术方案的进一步改进,适用于触摸板装夹治具的扫码装置还包括压铆轴、第三锁紧螺钉。第三支撑架借由压铆轴可自由旋动地实现与第二支撑架的铆接。在第二支撑架上开设有供第三锁紧螺钉穿过的长条弧形孔,相对应地,在第三支撑架上开设有供第三锁紧螺钉进行旋合的第三螺纹孔。当与扫码枪固定为一体的第三支撑架的偏摆角度调节到位后,对第三锁紧螺钉进行旋动以将第二支撑架向着第三支撑架进行压紧。
作为本发明技术方案的进一步改进,第一支撑架借由第四螺钉实现与滑移块的可拆卸连接,相对应地,在第一支撑架开设有供第四螺钉穿越的联接通孔,在滑移块上开设有供第四螺钉旋合的第四螺纹孔。联接通孔为沿着第一支撑架宽度方向进行延伸的长条腰形孔。
在工人或机械手向着触摸板装夹治具承载部喂入待黏合触摸板底板时,扫码装置可实时地对其上标识码信息进行识别、记录,以利于后续设定与预黏合触摸板相适配的胶水固化时长。采用此方法信息采集正确率极高,且完全无人化操作,从而有效地降低了人工使用成本。另外,通常采用上述技术方案进行设置,可方便、快捷地调节扫码枪的相对位置,以使其相对于待黏合触摸板始终保持于正确姿态,从而利于后续信息的采集。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是触摸板的结构示意图。
图2是触摸板装夹治具的结构示意图。
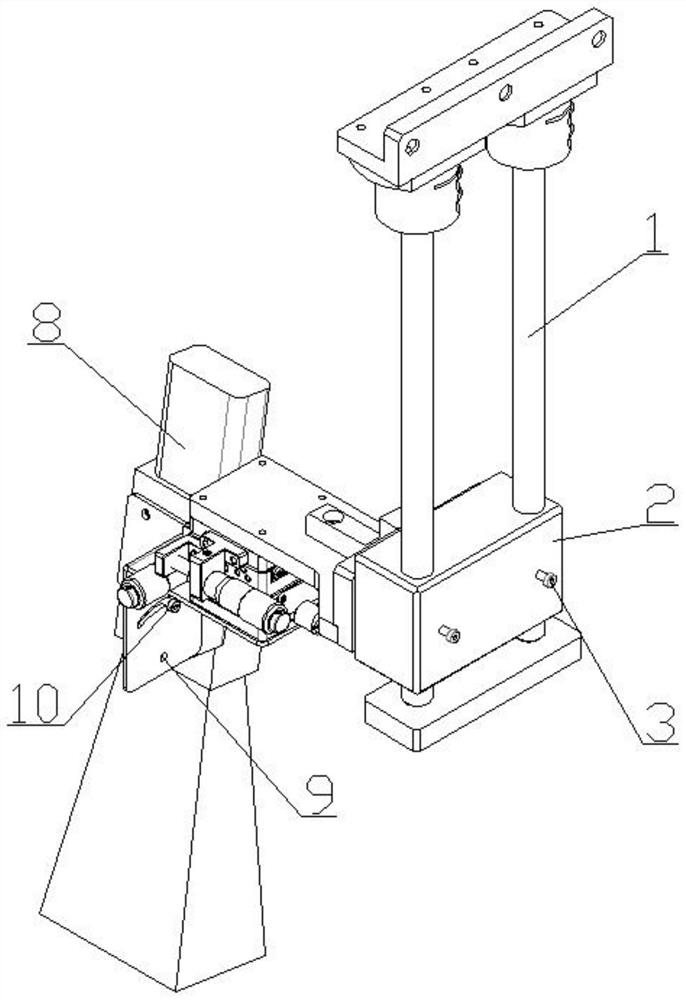
图3示出了本发明中适用于触摸板装夹治具的扫码装置在触摸板固化线中的相对位置示意图。
图4示出了本发明中适用于触摸板装夹治具的扫码装置在触摸板固化线中的相对位置示意图(隐去输送线两侧的外壳体后)。
图5是图4的I局部放大图。
图6示出了本发明中适用于触摸板装夹治具的扫码装置一种视角的立体示意图。
图7是图6的侧视图。
图8是图6的正视图。
图9示出了本发明中适用于触摸板装夹治具的扫码装置另一种视角的立体示意图。
1-滑移座;11-上置固定板;12-导向杆组件;121-第一导向杆;122-第二导向杆;13-下置固定板;2-滑移块;3-锁紧单元;31-第一锁紧螺钉;32-第二锁紧螺钉;4-第一支撑架;41-联接通孔;5-二维工作台;6-第二支撑架;61-长条弧形孔;7-第三支撑架;8-扫码枪;9-压铆轴;10-第三锁紧螺钉;11a-第四螺钉。
具体实施方式
在本发明的描述中,需要理解的是,术语“左”、“右”、“上”、“下”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
为了便于本领域技术人员充分理解本发明所公开的技术方案,预先对触摸板装夹治具结构以及实际应用方法作一个简要的说明,具体如下:如图2中所示,触摸板装夹治具包括有承载部和压盖部。压盖部相对于承载部沿着上下方向可自由地进行分离、扣合。实际操作过程中,首先将底板置放于承载部上,随后在底板上涂覆胶水层,而后将装配后的触控面板和电路板作为一个整体贴放于底板上,最后,将压盖部扣盖于承载部上,静置一段时间,使得承压的电路板和底板之间最终得到牢靠的黏合。
下面结合具体实施例,对本发明的内容做进一步的详细说明,如图3、4、5中所示,可知,该适用于触摸板装夹治具的扫码装置布置于触摸板装夹治具输送线的入料端,以实时地对待黏合触摸板上的标识码信息进行识别、记录。
图6、图7、图8分别示出了本发明中适用于触摸板装夹治具的扫码装置一种视角的立体示意图、侧视图及其正视图,可知,其主要由滑移座1、滑移块2、锁紧单元3、第一支撑架4、二维工作台5、第二支撑架6、第三支撑架7以及扫码枪8等几部分构成。其中,滑移座1布置于触摸板装夹治具输送线的一侧,且直接由图4中隐去的外壳体进行支撑。滑移座1沿着由上至下方向依序由上置固定板11、导向杆组件12以及下置固定板13连接而成。导向杆组件12由相并排而置的第一导向杆121、第二导向杆122构成。滑移块2同时地、可沿着着上下方向自由滑动地套设于第一导向杆121、第二导向杆122上,且在其上分别开设有与第一导向杆121、第二导向杆122外径相适配的第一导向孔、第二导向孔。当滑移块2的相对高度位置调整到位后,借由锁紧单元3以将滑移块2锁定于滑移座1上。第一支撑架4、二维工作台5、第二支撑架6、第三支撑架7依序连接于滑移块2和扫码枪8之间。二维工作台5由X工作台和Y工作台相叠合而成。当二维工作台5发生动作时,以驱动扫码枪8沿着前后方向或/和左右方向进行平移运动。这样一来,一方面,有效地提高了信息采集的正确率,且完全无人化操作,进而极大地降低了人工使用成本;另一方面,在扫描装置的实际应用过程中,可以方便、快捷地调节扫码枪的相对位置,以使其相对于待黏合触摸板始终保持于正确姿态,从而利于后续信息的采集。
上述适用于触摸板装夹治具的扫码装置的工作原理大致如下:在工人或机械手向着触摸板装夹治具承载部喂入待黏合触摸板底板时,借助于扫码枪8可实时地对触摸板底板上的标识码信息进行识别、记录。当需要调整扫码枪8的相对位置时,仅需启动二维工作台5,直至扫码枪8相对于触摸板装夹治具保持有正确相对位置。
已知,锁紧单元3可以采取多种设计结构以实现对滑移块2相对位置的锁定,不过,在此推荐一种设计结构简单,易于制造实现,且操作极为简单的实施方案,具体如下:如图6、8中所示,锁紧单元3包括有第一锁紧螺钉31、第二锁紧螺钉32。正对应于第一导向孔,在滑移块2上开设有供第一锁紧螺钉31旋入、且与第一导向孔相贯通的第一螺纹孔。正对应于第二导向孔,在滑移块2上开设有供第二锁紧螺钉32旋入、且与第二导向孔相贯通的第二螺纹孔。
已知,扫码枪8跟随滑移块2同步地进行位移运动。当需要对扫描枪8的相对高度位置进行调整时,仅需沿着第一导向杆121、第二导向杆122拖动滑移2即可。且当滑移块2的相对高度位置调整到位后,对第一锁紧螺钉31、第二锁紧螺钉32进行旋动,直至分别实现对第一导向杆121、第二导向杆122的侧向压紧,即完成了对扫码枪8相对高度位置的调整。
由图6中还可以看出,第三支撑架7借由压铆轴9可自由旋动地实现与第二支撑架6的铆接,且借由第三锁紧螺钉10来实现其与第二支撑架6相对位置的锁定。在第二支撑架6上开设有供上述第三锁紧螺钉10穿过的长条弧形孔61,相对应地,在第三支撑架7上开设有供第三锁紧螺钉10进行旋合的第三螺纹孔。当与扫码枪8固定为一体的第三支撑架7的偏摆角度调节到位后,对第三锁紧螺钉10进行旋动以将第二支撑架6向着第三支撑架7进行压紧。如此一来,当需调整扫码枪8的姿态时,首先松开第三锁紧螺钉10,使得第三支撑架7相对于第二支撑架6进行角度调整,直至扫码枪8保持有正确的姿态,与此同时,第三锁紧螺钉10始终沿着长条弧形孔61进行滑动,最后,及时地对第三锁紧螺钉10进行锁定即可。
最后,还需要说明的是,已知,根据预黏合触摸板批次、型号的不同,其上标识码牌的相对位置亦会有稍许差别。鉴于此,作为上述适用于触摸板装夹治具的扫码装置结构的进一步优化,如图9中所示,第一支撑架4优选借由第四螺钉11a实现与滑移块2的可拆卸连接,相对应地,在第一支撑架4开设有供第四螺钉11a穿越的联接通孔41,在滑移块2上开设有供第四螺钉11a旋合的第四螺纹孔。联接通孔41为沿着第一支撑架4宽度方向进行延伸的长条腰形孔。如此一来,可以方便、快捷地微调扫码枪8沿着左右方向上的相位位置,以确保扫码枪8与标识码牌的对位精准性。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种适用于触摸板装夹治具的扫码装置
- 一种适用于触摸板装夹治具的移载机构