一种新型垃圾收集车自动上料装置
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及一种环卫技术领域,尤其涉及一种新型垃圾收集车自动上料装置。
背景技术
目前,国内市场上的垃圾收集车辆自动化程度不高,收集垃圾时,需要挂桶工人下车,搬运垃圾桶挂在提桶机构上,作业环境条件差,费时费力。现有技术自动上料机构设计也越来越多,大部分上料机构主要包含伸缩机构,抓桶机构、倾翻机构。但是各类自动上料机构伸缩机构只有一层,受车辆宽度限制,伸出距离有限,如果垃圾桶附近有小轿车等障碍物,无法对垃圾桶内垃圾进行收集,将影响垃圾的收运效率;倾翻机构多使用伸缩油缸,结构复杂,占用空间大;抓桶机构多使用齿轮机构,抱抓上负载分配不均,抱桶容易出现打滑等现象。
发明内容
本发明所要解决的技术问题是提供一种可快速抓取垃圾桶、提高作业效率、结构简单紧凑、抱桶更牢固的种新型垃圾收集车自动上料装置。
为解决上述技术问题,本发明的技术方案是:一种新型垃圾收集车自动上料装置,包括安装在收集车车架上的伸缩机构,还包括机械臂固定座和抱抓固定座,所述机械臂固定座安装在所述伸缩机构上,所述机械臂固定座上安装有旋转动力装置,所述抱抓固定座上通过销轴转动安装有两抱抓,所述机械臂固定座与抱抓固定座之间铰接有副臂,所述旋转动力装置输出端安装有主臂,所述主臂通过销轴与所述抱抓固定座转动连接,所述抱抓固定座上转动安装有抱抓连接座,所述抱抓连接座与两所述抱抓之间分别铰接有连接杆,所述抱抓固定座与抱抓连接座之间设置有抱抓驱动装置。
作为优选的技术方案,所述副臂为两根,两所述副臂的一端分别与所述机械臂固定座的两侧铰接,两所述副臂的另一端分别与所述抱抓固定座的两侧铰接。
作为优选的技术方案,两所述抱抓转动安装在所述抱抓固定座的外端下侧,所述抱抓固定座的内上方设有伸出的安装座,所述抱抓连接座的一端与所述安装座转动连接,所述抱抓连接座的另一端与两所述连接杆分别铰接。
作为优选的技术方案,所述伸缩机构包括外滑套,所述外滑套内滑动套装有中滑套,所述中滑套内滑动套装有内滑套,所述机械臂固定座安装在所述内滑套上,所述外滑套与中滑套之间铰接有外伸缩油缸,所述中滑套与内滑套之间铰接有内伸缩油缸。
由于采用了上述技术方案的一种新型垃圾收集车自动上料装置,包括安装在收集车车架上的伸缩机构,还包括机械臂固定座和抱抓固定座,所述机械臂固定座安装在所述伸缩机构上,所述机械臂固定座上安装有旋转动力装置,所述抱抓固定座上通过销轴转动安装有两抱抓,所述机械臂固定座与抱抓固定座之间铰接有副臂,所述旋转动力装置输出端安装有主臂,所述主臂通过销轴与所述抱抓固定座转动连接,所述抱抓固定座上转动安装有抱抓连接座,所述抱抓连接座与两所述抱抓之间分别铰接有连接杆,所述抱抓固定座与抱抓连接座之间设置有抱抓驱动装置。本发明通过伸缩机构可以避开垃圾桶周围小轿车等障碍物,快速抓取垃圾桶,提高作业效率;通过副臂、主臂、机械臂固定座和抱抓固定座构成四连杆机构,由旋转动力装置配合驱动该四连杆机构实现倾翻功能,结构简单紧凑;通过连接杆与抱抓驱动装置配合,抱抓上负载分布均匀,抱桶更牢固。所以本发明提高垃圾收集效率,降低人工劳动强度,简化上料装置结构,提升抱抓抓取稳定性,减少垃圾桶掉落风险。
附图说明
以下附图仅旨在于对本发明做示意性说明和解释,并不限定本发明的范围。其中:
图1是本发明的结构示意图;
图2是本发明伸缩机构打开后的结构示意图;
图3是装配有本发明的垃圾箱总成结构示意图;
图4是本发明抓取垃圾桶示意图;
图5是本发明举升垃圾桶示意图;
图6是本发明倾倒垃圾桶示意图。
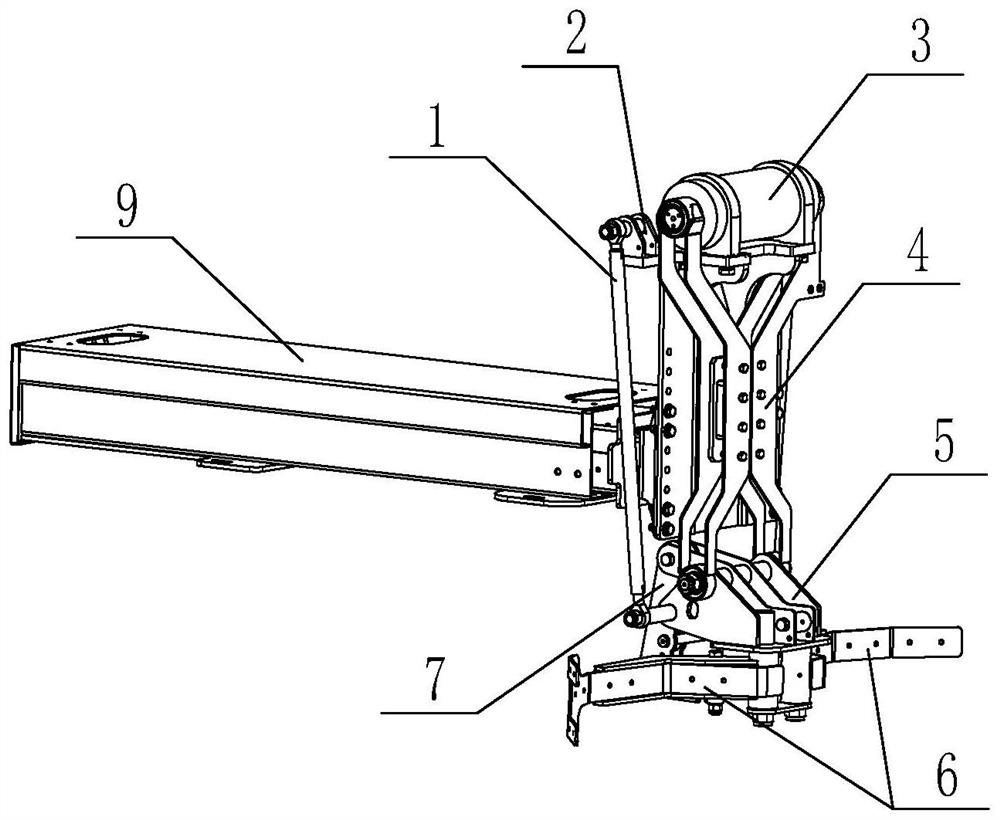
图中:1-副臂;2-机械臂固定座;3-旋转动力装置;4-主臂;5-抱抓固定座;6-抱抓;7-抱抓连接座;8-垃圾桶;9-外滑套;10-外伸缩油缸;11-中滑套;12-内滑套;13-内伸缩油缸;14-安装座;15-抱抓驱动装置;16-连接杆;17-垃圾箱;18-料斗;19-车架。
具体实施方式
如图1和图2所示,一种新型垃圾收集车自动上料装置,通常将本自动上料装置布置在垃圾收集车料斗18的下方,如图3中所示,将本自动上料装置布置在垃圾收集车料斗18的前下侧车架19上;包括安装在收集车车架19上的伸缩机构,还包括机械臂固定座2和抱抓固定座5,所述机械臂固定座2安装在所述伸缩机构上,所述机械臂固定座2上安装有旋转动力装置3,所述抱抓固定座5上通过销轴转动安装有两抱抓6,所述机械臂固定座2与抱抓固定座5之间铰接有副臂1,所述旋转动力装置3输出端安装有主臂4,所述主臂4通过销轴与所述抱抓固定座5转动连接,所述抱抓固定座5上转动安装有抱抓连接座7,所述抱抓连接座7与两所述抱抓6之间分别铰接有连接杆16,所述抱抓固定座5与抱抓连接座7之间设置有抱抓驱动装置15。工作时通过伸缩机构向车的周围伸出或缩回可以避开垃圾桶8周围小轿车等障碍物,快速抓取垃圾桶8;通过旋转动力装置3驱动由副臂1、主臂4、机械臂固定座2和抱抓固定座5构成四连杆机构实现倾翻功能,通过连接杆16与抱抓驱动装置15配合驱动抱抓6抱桶。
如图1和图2所示,所述副臂1为两根,两所述副臂1的一端分别与所述机械臂固定座2的两侧铰接,两所述副臂1的另一端分别与所述抱抓固定座5的两侧铰接。如图3中所示,本自动上料装置向车架19的侧方伸出,所述副臂1和所述主臂4就成了前后设置,这样所述副臂1、所述主臂4与所述抱抓固定座5的两侧部和机械臂固定座2两侧部配合形成了四连杆机构,大大提高了倾翻的稳定性,并且两所述副臂1可以采用长度可调节的调节臂,与所述主臂4配合,调节垃圾桶8倾翻角度。所述旋转动力装置3可以采用双头电机或两端同步输出的液压马达,通过电机或液压马达两端设有同步的输出轴,主臂4两端可分别设置两连接臂,两输出轴与所述主臂4一端的两连接臂分别连接,如可采用键连接等方式固定连接在一起,所述主臂4另一端的两连接臂分别与所述抱抓固定座5的两侧部连接,提高主臂4转动性能。
如图1和图2所示,两所述抱抓6转动安装在所述抱抓固定座5的外端下侧,所述抱抓固定座5的内上方设有伸出的安装座14,所述抱抓连接座7一端与所述安装座14转动连接,所述抱抓连接座7的另一端与两所述连接杆16分别铰接。现有抓桶机构的两抱抓6之间设有相互啮合的齿轮组、其中一抱抓6连接驱动油缸等驱动装置作为主动抓、另一抱抓6作为从动抓,工作时主动抓与从动抓之间受力不匀易导致两抱抓6负载分配不均。而本发明抱抓驱动装置15可以采用抱抓油缸,通过油缸驱动所述抱抓连接座7带动两所述连接杆16,实现两所述抱抓6的抓抱功能,提高了两抱抓6运动的同步性和负载分配均匀性。
如图1和图2所示,所述伸缩机构包括外滑套9,所述外滑套9内滑动套装有中滑套11,所述中滑套11内滑动套装有内滑套12,所述机械臂固定座2安装在所述内滑套12上,所述外滑套9与中滑套11之间铰接有外伸缩油缸10,所述中滑套11与内滑套12之间铰接有内伸缩油缸13,且使用时通常将外滑套9固定在料斗18下方的车架19上,并且料斗18远离料斗出料端与料斗18底部的壳体可采用为一体的弧状,这样外滑套9即可安装在料斗18的下方,提高了结构紧凑性。
如图3-6所示,本发明的垃圾收集车自动上料装置工作包括以下步骤:
当垃圾收集车行驶或未进行作业的初始状态时,伸缩机构的内伸缩油缸13和外伸缩油缸10处于收回状态;旋转动力装置3处于角度为0°;抱抓油缸伸出,两抱抓6打开至最大状态;自动上料装置在行驶过程当中完全处于车身最大宽度以内,保障驾驶的通过性和安全型;
当垃圾收集车停到适当位置,伸缩机构开始工作时,内伸缩油缸13和外伸缩油缸10伸出,内滑套12和中滑套11伸出,带动两抱抓6至垃圾桶8前方合适位置;抱抓油缸收回,带动抱抓连接座7与两连接杆16配合,使两抱抓6闭合,抱住垃圾桶8;旋转动力装置3旋转30°,使垃圾桶8离开地面;内伸缩油缸13和外伸缩油缸10完全收回,带动垃圾桶8至料斗18前侧;旋转动力装置3旋转至180°,带动主臂4翻转,并与两副臂1配合,使垃圾桶8内垃圾倒入料斗18内,再进入垃圾箱17内;旋转动力装置3反向旋转至30°,带动主臂4反向翻转,空垃圾桶8转回接近地面位置;内伸缩油缸13和外伸缩油缸10伸出合适距离,抱抓油缸伸出,两抱抓6完全打开,将空垃圾桶8放回原位;内伸缩油缸13和外伸缩油缸10完全收回,旋转动力装置3旋转至0°,两抱抓6回到初始位置。其中内伸缩油缸13、外伸缩油缸10、抱抓油缸等液压元件的高压油源可由垃圾收集车的液压系统提供,并由垃圾收集车的液压控制系统控制。
本发明与现有的技术相比,具有以下优点1、本发明的伸缩机构伸缩距离大,可远距离自动抓取垃圾桶8,省时省力;2、本发明的自动上料装置可抓取120L~360L多种规格的垃圾桶8;3、本发明的自动上料装置可以布置在垃圾车料斗18的下方,装置简单,占用空间小;4、本发明的自动上料装置使用抱抓油缸与连杆机构配合,抱抓6载荷分布均匀,抱桶更加稳定,减少垃圾桶8掉落风险。
如上所述,已经在上面具体地描述了本发明的实施例,但是本发明不限于此。本领域的技术人员应该理解,可以根据设计要求或其他因素进行各种修改、组合、子组合或者替换,而它们在所附权利要求及其等效物的范围内。
- 一种新型垃圾收集车自动上料装置
- 一种分体式新型自动垃圾收集及垃圾桶清洗多功能车