一种适用于FMCW汽车雷达目标速度扩展方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及FMCW雷达信号处理技术领域,尤其涉及使用24GHz或77GHz频段采用FMCW汽车雷达目标速度扩展方法。
背景技术
近年来,毫米波雷达在高级驾驶员辅助系统(ADAS)中的使用呈现了爆发式的增长。毫米波雷达通过发射并处理接收到的电磁波,可以精确地测量出目标的距离,速度和角度,受天气,光线等环境因素的影响小,非常适合汽车雷达应用。雷达的探测距离,速度和角度的最大值,最小值和分辨率是其最重要的性能指标。这些指标受波形制式,算法,中射频电路性能,DSP处理能力和内存大小等因素综合影响。一般来说汽车雷达需要达到100到200Km/h的最高检测速度,现有的FMCW雷达受中射频电路性能的限制,很难在满足其它性能指标的前提下支持这么高的检测速度。如何在现有的硬件平台上,使用合适的波形设计或者信号处理方法解决速度模糊问题是当前汽车雷达信号处理的关键技术之一。
目前存在基于中国剩余定理,基于多普勒相偏补偿假设和基于目标跟踪假设等三种适合FMCW雷达的速度扩展方法,可通过相应的波形设计或数字信号处理方法将雷达的最高检测速度提高至车厂要求。上述三种方法各有特点,其中基于中国剩余定理的速度扩展算法适用面广,速度估计的准确度高,但是需要结合Fast-slow chirp的特殊波形,数据处理运算量较大。基于Doppler相偏补偿假设的速度扩展算法非常适合TDM-MIMO的波形配置,不需要改变雷达的波形,但是当前只能支持最大两倍的速度扩展,并且仅适用于MIMO雷达制式。基于目标跟踪假设的速度扩展算法充分利用了目标跟踪的历史信息,对目标检测层的要求低,但是加大了目标跟踪的计算量,对目标速度突变的响应会受跟踪周期的影响。如何提供一种速度扩展方法既能够有效处理目标速度模糊问题,同时兼具适用面广、运算简单、更新速度和处理速度快的特点是当前亟待解决的一个问题。
发明内容
有鉴于此,本发明提供一种适用于FMCW汽车雷达目标速度扩展方法用于解决现有技术的不足。
为达到上述目的,本发明采用如下技术方案:
本发明实施例提供了一种适用于FMCW汽车雷达目标速度扩展方法,其特征在于,包括:
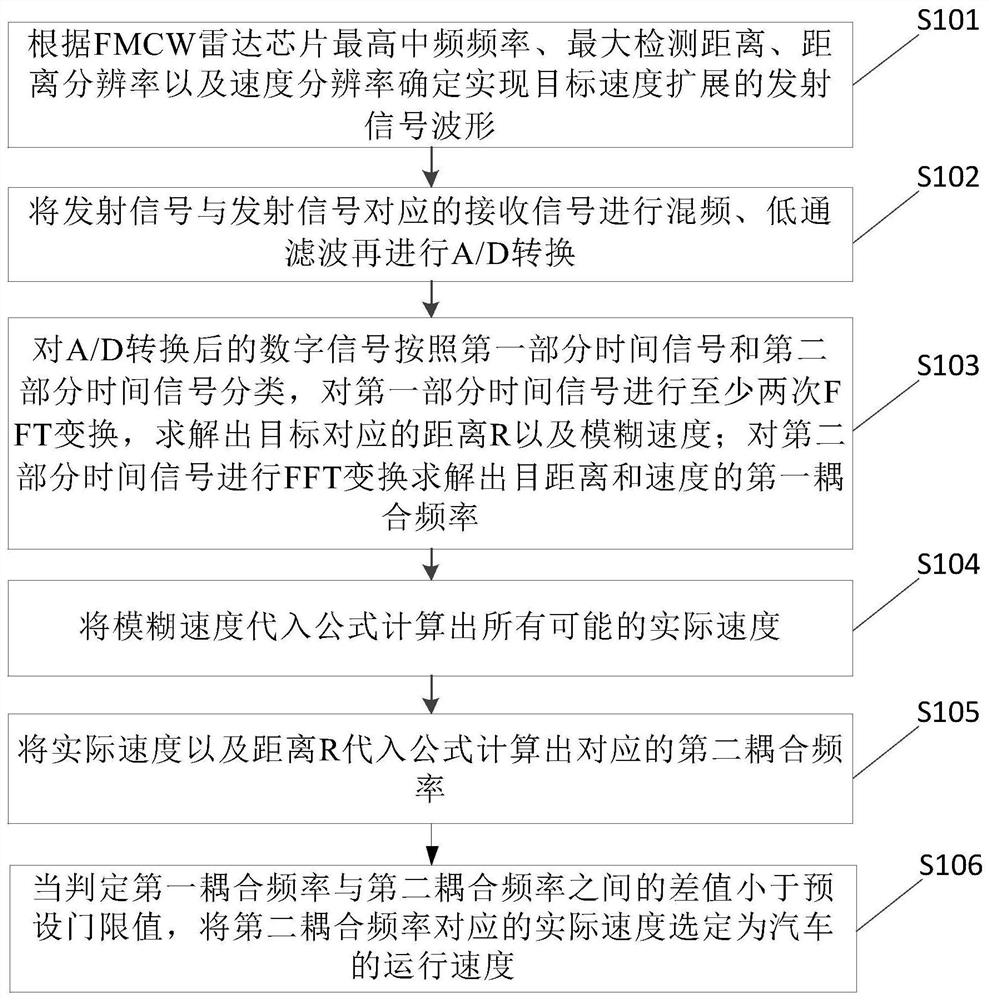
根据FMCW雷达芯片最高中频频率、最大检测距离、距离分辨率以及速度分辨率确定实现目标速度扩展的发射信号波形;所述发射信号波形由两部分组成,第一部分为最小周期为T
将发射信号与发射信号对应的接收信号进行混频、低通滤波再进行A/D转换;
对A/D转换后的数字信号按照第一部分时间信号和第二部分时间信号分类,对第一部分时间信号进行至少两次FFT变换,求解出目标对应的距离R以及模糊速度v
将模糊速度v
将实际速度v
当判定第一耦合频率f与第二耦合频率f
进一步地,所述根据FMCW雷达芯片最高中频频率、最大检测距离、距离分辨率以及速度分辨率确定实现目标速度扩展的发射信号波形具体包括:
将距离分辨率ΔR代入公式
将锯齿波的带宽B、最大检测距离R以及雷达芯片最高中频频率F
将速度分辨率Δv代入公式
进一步地,所述最高检测速度
进一步地,所述实际速度v
进一步地,所述将发射信号与发射信号对应的接收信号进行混频、低通滤波具体表示如下:
发射信号的锯齿波用公式表示如下:
若目标距离为R,速度为v,则时延τ用公式表示如下:
则发射信号对应的接收信号用公式表示如下:
将发射信号与接收信号进行混频和滤除高频分量得到中频信号用公式表示如下:
将时延表达式代入上式整理得到:
进一步地,对于所述第一部分锯齿波,中频信号可简化表示如下:
对于所述第二部分锯齿波,中频信号可简化表示如下:
基于本发明提供的上述方案,能够有效处理目标速度模糊问题,同时兼具适用面广、运算简单、更新速度和处理速度快的特点。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的一种适用于FMCW汽车雷达目标速度扩展方法的流程示意图;
图2为本发明实施例提供的发射信号波形图;
图3为本发明实施例提供的单目标仿真测量结果。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,本发明实施例提供了一种适用于FMCW汽车雷达目标速度扩展方法,包括:
S101、根据FMCW雷达芯片最高中频频率、最大检测距离、距离分辨率以及速度分辨率确定实现目标速度扩展的发射信号波形。
如图2所示,发射信号波形由两部分组成,第一部分为最小周期为T
在发射信号波形的确定过程中,将距离分辨率ΔR代入公式(1)中计算出锯齿波的带宽B,
将锯齿波的带宽B、最大检测距离R以及雷达芯片最高中频频率F
将速度分辨率Δv代入公式(3)计算出第一部分锯齿波的最小周期T
S102、将发射信号与发射信号对应的接收信号进行混频、低通滤波再进行A/D转换。
将发射信号与接收信后进行混频、低通滤波再进行A/D转换,将对应的数字信号送入DSP中,为进一步处理做好准备。具体如下:
图2中的锯齿波发射信号用公式(4)表示如下:
公式(4)仅仅描述了第一个锯齿波的表达式,想要表述第n个锯齿波,可以将t定义为t=nT
若目标距离为R,速度为v,则时延τ用公式(6)表示如下:
则发射信号对应的接收信号用公式表示如下:
将发射信号与接收信号进行混频和滤除高频分量得到中频信号用公式(8)表示如下:
将时延表达式代入上式整理得到表达式(9):
中频信号x
S103、对A/D转换后的数字信号按照第一部分时间信号和第二部分时间信号分类,对第一部分时间信号进行至少两次FFT变换,求解出目标对应的距离R以及模糊速度v
对第一部分时间信号进行第一次FFT变换可以求解出距离;对第一部分时间信号进行第二次FFT变换可以求解出速度;对第一部分时间信号进行第三次FFT变换可以求解出方位信息。
按照图2所示的雷达波形,其锯齿波分为第一部分的短周期锯齿波和第二部分的长周期锯齿波,由于第一部分锯齿波周期为微秒级,而第二部分锯齿波周期为毫秒级,因此,第一部分锯齿波斜率远大于第二部分锯齿波斜率。这样在第一部分锯齿波处理中可以忽略距离和速度的耦合关系,公式(9)可以化简为公式(10):
其中
令
在公式(10)中,相位差应该小于π,否则就会产生相位模糊,从而导致速度模糊,使用该方法可以求解的最高检测速度v
对于所述第二部分锯齿波,对应于斜率α比较小,中频信号可简化为式(14):
对其进行FFT变换时,距离R和速度v就会产生耦合,耦合频率表示如下:
其中,α为第二部分锯齿波的斜率;f
S104、将模糊速度v
使用模糊速度和最高检测速度即可计算出所有可能的实际速度。
在第一部分信号中当一个目标的实际速度v
v
即模糊速度v
v
实际中因为汽车速度的限制,一般N=2就已经足够,即支持v
S105、将实际速度v
将实际速度v
S106、当判定第一耦合频率f与第二耦合频率f
通过上述方法有效解决速度模糊问题,实现速度扩展,达到车厂要求。
以上总体实现过程可参见如下仿真实例:
某芯片,其中频信号频率F
根据公式(1)可知扫描带宽B不能小于3*10
仿真时目标参数设置为目标距离R=60m,目标速度为35m/s,载波中心频率为77GHz。仿真结果如图3所示。
如图3所示,左边两幅图为使用第一部分信号求解的目标距离和模糊速度,分别为60m和-9.389m/s;最右图为使用第二部分信号求解的目标距离与速度耦合频率,其值为98.5kHz。按照前面所述当探测速度为负值时,真实速度的可能值为模糊速度v
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 一种适用于FMCW汽车雷达目标速度扩展方法
- 一种LFMCW雷达目标回波信号模拟方法